基于UIO的汽車主動懸架系統狀態估計
2017-12-11 01:07:38包黎明鐘孝偉王乾乾
汽車實用技術 2017年22期
包黎明,鐘孝偉,王乾乾
(遼寧工業大學汽車與交通工程學院,遼寧 錦州 121000)
基于UIO的汽車主動懸架系統狀態估計
包黎明,鐘孝偉,王乾乾
(遼寧工業大學汽車與交通工程學院,遼寧 錦州 121000)
基于未知擾動輸入觀測器對汽車主動懸架車身垂直位移,車身垂直速度,非簧載質量垂直位移和非簧載質量垂直速度狀態量進行估計,殘差理論對汽車主動懸架作動器發生增益故障時的控制力補償展開研究。分別建立兩自由度1/4車輛主被動懸架模型和故障模型,通過設計未知輸入擾動觀測器對懸架狀態進行估計,并通過故障診斷和檢測,獲得懸架故障輸出殘差。在此基礎上,基于控制率重組思想,對LQG控制率實時控制力補償,實現主動懸架作動器的容錯控制,并通過Matlab/Simulink對控制效果進行驗證。仿真結果表明,設計的觀測器能很及時的發現故障發生時刻,而采取的控制力補償能很快使故障懸架恢復到原來主動懸架性能水平,從而消除了作動器故障對懸架性能的影響,提高了主動懸架控制的可靠性。
主動懸架;作動器;輸出殘差控制;力補償
引言
主動懸架能根據汽車的行駛條件對懸架系統的剛度和阻尼特性進行動態自適應調節,使懸架系統始終處于最佳減震狀態。目前,對主動懸架控制的研究大部分是基于執行器(作動器)和傳感器完好無故障時設計的,一旦傳感器或作動器出現故障,之前在完好情況下設計的控制器將出現誤控制,懸架系統將達不到預期的效果,影響乘坐舒適性。近年來,容錯控制研究在智能控制領域受到越來越多的重視[1],它可以確保在某些部件發生故障的情況下,系統仍能按原定性能指標或性能指標略有降低(但可接受),而完全地完成控制任務。
1 建模與主動懸架LQG控制
1.1 1/4車輛模型建立
建立兩自由度1/4車輛懸架動力學模型[3]如圖1所示。
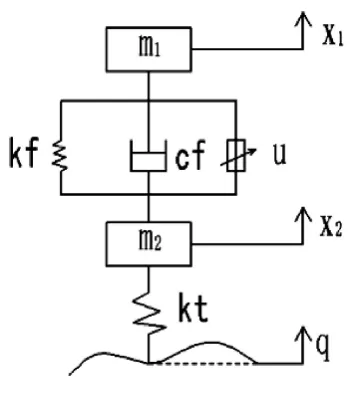
圖1 2自由度1/4車懸架模型
根據牛頓運動定律,得到運動微分方程為[4]:

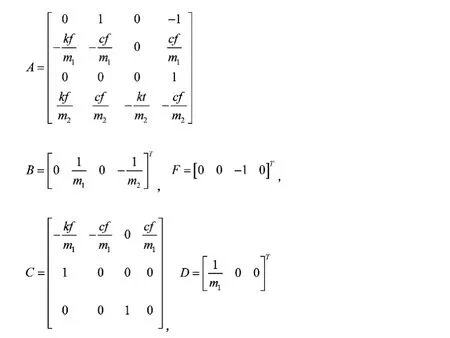
將公式(1)和(2)轉換為主動懸架空間表達式:

式中:
1.2 1/4車輛懸架LQG控制率設計
對本主動懸架模型采用線性二次型最優控制,考慮到汽車行駛平順性、操縱穩定性和降低能耗,選取車身垂直加速和控制輸入u作為性能評價指標。采用狀態調節器,其指標泛:

整理成標準二次型形式:

式中q1、q2、q3、q4為性能評價指標的加權系數。在Matlab中調用LQG工具箱,求出控制率,K即為所求的最優反饋控制率,改變 q1、q2、q3、q4的值,反復調試,直到出現良好的控制效果,q1=2×107,q2=2×103,q3=106,q4=4。
在Matlab中搭建車輛模型,對設計的LQG控制器進行仿真驗證,由仿真結果可知,在懸架無故障時采用 LQG控制能夠大大降低車身垂直加速度,但犧牲了一部分輪胎動行程。
2 主動懸架作動器故障容錯控制方法
2.1 故障檢測方法
發展至今的故障檢測方法大致可劃分為基于信號處理的方法、基于解析模型的方法、基于知識的方法三大類[5]。而基于解析模型的方法又可分為狀態估計方法和參數估計方法。其中狀態估計方法包括觀測器方法和濾波器方法,本文采用觀測器方法。由于懸架存在路面未知干擾輸入的影響,為抑制其對狀態觀測器的影響,設計未知輸入擾動的觀測器(Unknown Input Observer,UIO)。因為原系統是狀態完全能觀測的,所以可設計全維狀態觀測器,其結構為[6]。

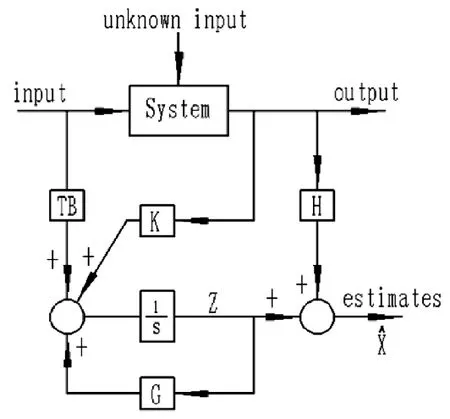
圖4 未知輸入觀測器結構
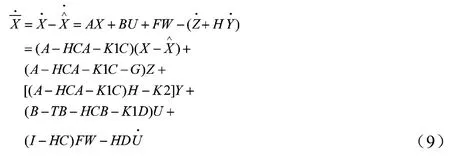
其中K=K1+K2,I為適維單位矩陣,H的一個殊解為[7]
如果(9)式滿足以下條件:
2.2 作動器故障在線診斷
當作動器發生增益故障時,根據所設計的觀測器得到故障時殘差:


式中 為積分變量,結合式(11)與設計的觀測器可得主動懸架作動器增益估計值。

2.3 控制力補償方法
控制力補償是在汽車主動懸架作動器發生故障后,不需要改變原主動懸架 LQG控制器結構,只需根據前面故障檢測與診斷出的信息對作動器的力進行補償即可。
無故障時汽車主動懸架狀態空間方程為:

無故障時作動器力輸出為:

而發生故障增益時汽車主動懸架狀態方程為[10]:

故障時作動器力輸出為:

3 仿真結果分析
本文在MATLAB/Simulink中搭建1/4車輛模型,選取汽車主動懸架參數為 m1=576kg,m2=83kg,kt=350000N·m,kf=40000 N·m,cf=1360N·s/ m。利用Matlab/M文件設計故障檢測模型和控制力補償模型,選取 G=-0.001I,分別求得K,T。在懸架無故障時得到懸架動撓度、車身垂直速度、輪胎動行程、非簧載質量垂直速度的實際值與狀態估計值如圖6、7、8、9所示。
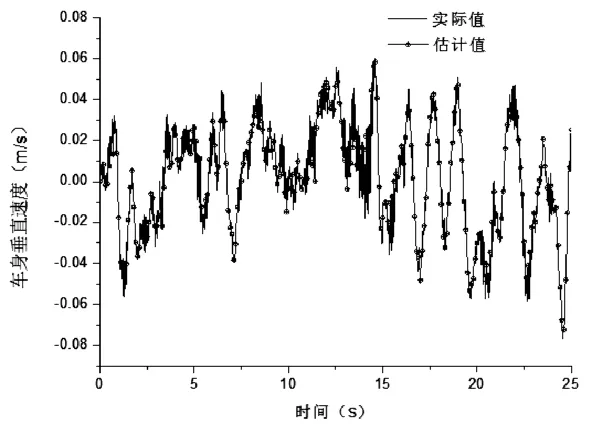
圖6 車身垂直速度估計值
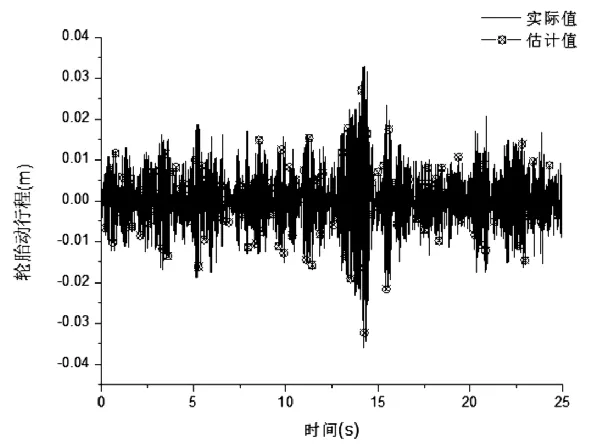
圖7 輪胎動行程估計值
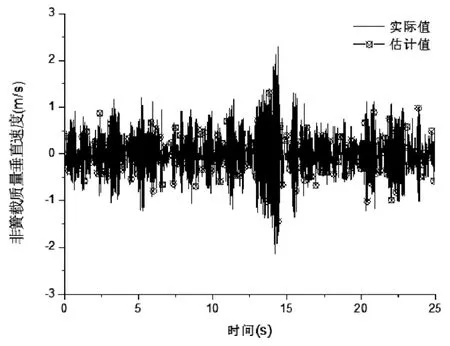
圖8 非簧載質量垂直速度估計值
在Matlab/Simulink中人為設定10s時作動器發生0.2倍的增益故障,所得的殘差信息和故障增益估計值分別如圖10-15所示。
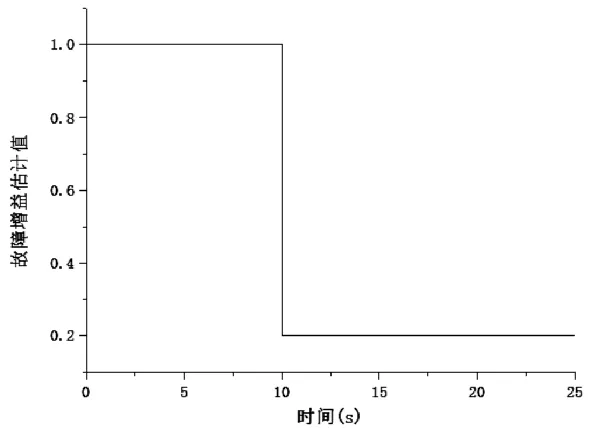
圖9 作動器0.2倍故障增益估計值
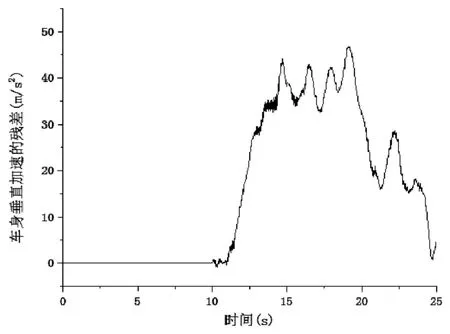
圖10 車身垂直加速度殘差
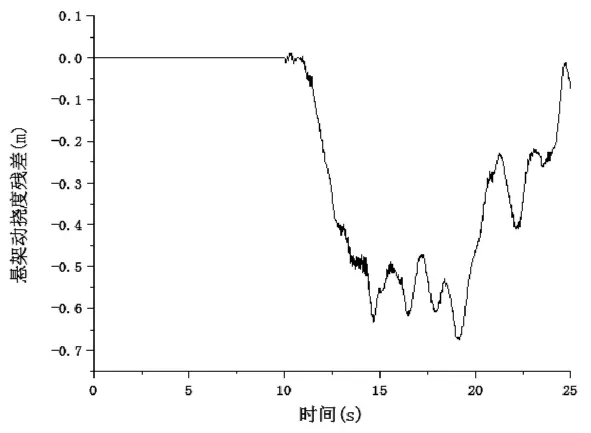
圖11 懸架動撓度殘差
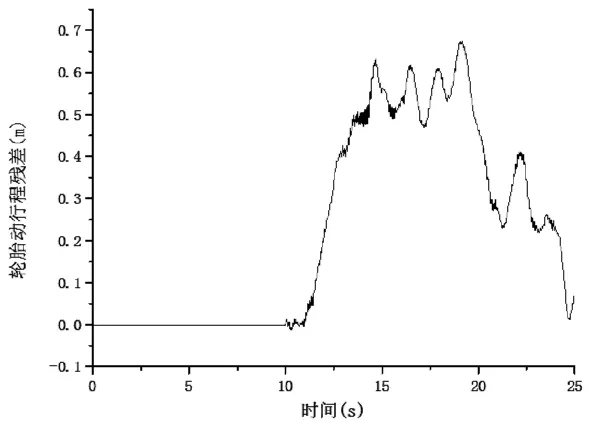
圖12 輪胎動行程殘差
完好無故障時懸架采用 LQG控制器與被動懸架車身垂直加速度、懸架動撓度、輪胎動行程對比分別如圖所示。
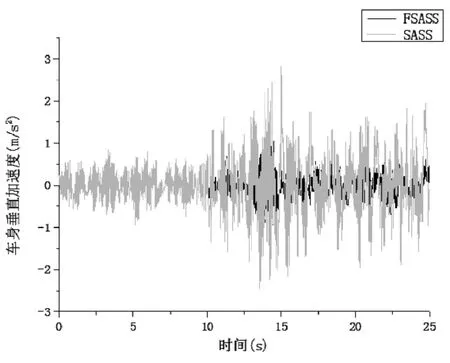
圖13 容錯控制車身垂直加速度對比
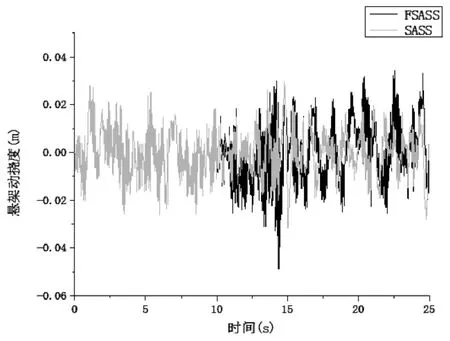
圖14 容錯控制懸架動撓度對比
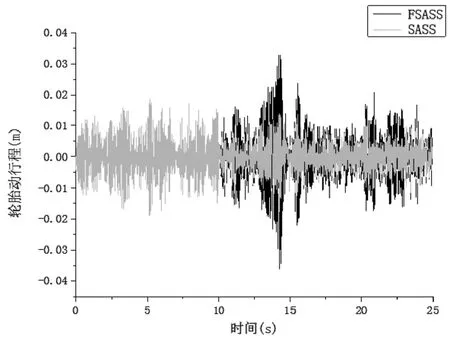
圖15 容錯控制輪胎動行程對比
4 結論
采用濾波白噪聲路面輸入作為懸架的擾動輸入與實際路面狀況相接近,所設計的UIO觀測器能夠很好的抑制路面輸入的干擾,對懸架系統的狀態變量進行估計。在所設計的觀測器的基礎上進行系統的故障檢測與診斷能夠及時準確的判斷出發生故障的時間與類型,為后面作動器力進行補償提供了信息。基于主動懸架作動器故障的容錯控制能夠很好的提高懸架的乘坐舒適性,滿足汽車更加安全、舒適的發展趨勢。
[1] 沈啟坤.基于自適應控制技術的故障診斷與容錯控制研究[D].南京航空航天大學,2015.
[2] 聞新,張洪鉞,周露. 控制系統的故障診斷與容錯控制[M].北京:機械工業出版社,1998.
[3] Crolla D,喻凡.車輛動力學及其控制[M].北京:人民交通出版社,2003.
[4] 喻凡,林逸.汽車系統動力學[M].北京:機械工業出版社,2014.
[5] 控制系統故障診斷與容錯控制的分析和設計[M].國防工業出版社.
[6] Zhou Kemin,Ren Zhang,Wang Wei.On the design of unknown input observers and fault detection filters[C] // Proceedings of the 6th World Congress on Intelligent Control and Automation, Dalian,China,2006:5 638~5 642.
[7] Zhou Kemin,Ren Zhang,Wang Wei.On the design of unknown input observers and fault detection filters[C]//Proceedings of the 6th World Congress on Intelligent Control and AutomationAACC.
Vehicle active suspension system based on UIO state estimation
Bao Liming, Zhong Xiaowei, Wang Gangan
( Cars and traffic engineering of liaoning university of technology college, Liaoning Jinzhou 121000 )
Based on the idea of control law reorganization, the actuator of active suspension actuator is compensated. The 2-DOF model and the fault suspension model are established. The suspension state is estimated by designing an unknown input disturbance observer, and the fault output is obtained by fault diagnosis and detection. The fault-tolerant control of the active suspension actuator is realized by designing the fault-tolerant control of the LQG control law based on the control law reconfiguration. Matlab / Simulink simulation results show that the design of the observer can be very timely detection of the time of fault,control force compensation can quickly restore the original suspension to the original performance level, thus eliminating the actuator fault on the suspension performance Thereby improving the riding comfort of the suspension.
Active suspension; Actuator; Fault-tolerant control; Actuator force compensation Simulation verification
U463.9
A
1671-7988(2017)22-23-04
10.16638 /j.cnki.1671-7988.2017.22.008
包黎明,就讀于遼寧工業大學汽車與交通工程學院。
CLC NO.:U463.9
A
1671-7988(2017)22-23-04
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
汽車維修與保養(2019年7期)2020-01-06 03:30:42
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
光學精密工程(2016年6期)2016-11-07 09:07:19
汽車維護與修理(2016年10期)2016-07-10 08:17:41
作文大王·低年級(2016年4期)2016-04-18 00:24:37
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維護與修理(2015年2期)2015-02-28 12:15:39
