無人機任職專業模塊化課程設計與實施研究
2017-12-05 08:38:43閆云斌劉新海李永科李寶晨
繼續教育 2017年11期
關鍵詞:模塊化
閆云斌+劉新海+李永科+李寶晨
摘 要:近年來,隨著無人機裝備的快速發展,無人機任職培訓專業在我院的比重逐漸增大。現有的無人機任職專業課程設置還沿用學歷教育,在具體的授課過程中存在諸多問題。因此,需要重新構建無人機任職專業課程體系,以適應任職培訓的需求。依據無人機裝備特點,結合崗位任職能力需求,構建了模塊化課程體系,并最終通過無人機數據鏈分系統專業進行了實踐,實踐結果表明,采用模塊化課程能夠提升無人機任職培訓的教學質量。
關鍵詞:無人機專業;任職教育;裝備教學;模塊化
中圖分類號:G726 文獻標識碼:A
一、引言
2016年黨中央、中央軍委提出了健全軍隊院校教育、部隊訓練實踐、軍事職業教育三位一體新型軍事人才培養體系的戰略部署。為此,院校應該根據自身職能定位不斷完善專業課程體系建設,以適應院校改革的要求。
近年來,隨著無人機裝備的快速發展,使得部隊對于無人機裝備人才的需求日益迫切。我院從2004年開始增設生長干部任職教育,2010年又開設了現職干部培訓的課程,這些都使得無人機裝備教學由傳統的學歷教育為主體,逐漸轉變成任職教育為主體。
無人機屬于高新武器裝備,技術構成復雜,涉及到電子、光學、通信、控制、導航、機械、計算機等多個學科領域,屬于技術密集型裝備。在結構組成方面,無人機包括導航與控制系統、飛機系統、數據鏈系統和任務設備等,每個分系統又包含許多子系統,系統構成復雜。而任職教育培訓的學員來自不同的地方大學,所學的專業通常只能涵蓋無人機技術領域的某個或幾個方面,如果所學的分系統恰好是其所學過的專業,相對興趣還比較大,學習效果會比較好。而如果沒有相關知識,理解起來就會比較抽象,學習效果就不夠理想。
此外,任職培訓學員要在有限的學時內把分系統都學習完,都很難深入掌握無人機系統的相關理論知識和操作實踐內容。但目前,無人機任職教育專業,其教材、教學內容、教學方法在課程開發過程中,都沿用了本科學歷教育模式,講的過于系統、過于復雜,這些都不利于無人機任職教育培養目標的實現。因此,需要對無人機任職教育的教學進行重新思考。
在模塊化課程中,模塊是指在某一個職業領域、工作范圍內,將一項工作劃分為幾個部分,這種劃分符合實際工作的流程,有明確的開頭和結尾,這樣劃分出來的每一部分就是一個模塊。通過上述定義可知,無人機系統任職教育教學完全適合模塊化課程。
二、無人機任職專業課程現狀及存在問題
目前,無人機任職專業課程設置基本按照學歷教育培養目標來設置,但是任職教育和學歷教育存在一些區別:
(一)學科內涵不同
無人機專業教學屬于裝備教學,而裝備教學的學科是橫向綜合的,主要指在裝備使用和維護任務必須的多個學科知識的綜合。傳統的學科主要從縱向角度考慮,而裝備教學則和傳統學科不同,更加注重橫向角度,前者是某個學科全部知識點的集合,后者主要是以崗位任職能力為牽引,側重多個學科知識點的綜合,對學科知識的體系是否完整并不做要求。
(二)專業指向不同
軍事任職教育是適應部隊崗位任職能力需求,其專業要求和部隊實際工作對接。因此,無人機任職教育的專業應該根據部隊裝備發展需求,結合裝備操作使用和維護的任務分工,開展裝備原理教學、維修技能培訓以及職業道德培養。因此,對于任職教育的專業設置不能采用學歷教育中以學科分類的專業設置,而是面向無人機裝備使用和維護的任務分工,每個專業都是相關任職崗位技能的集合。
(三)課程設置不同
課程是指被列入教學計劃的各門學科及其在教學計劃中的地位和開設順序的總和。通常針對某一專業設置,而無人機任職專業其課程一般由人才培養方案和教學實施計劃決定,其課程設置是以崗位任職為前提,通過對相關教學內容進行整合,采取模塊化課程進行設置。
三、無人機專業模塊化課程設計
(一)模塊化課程理論基礎
模塊化課程屬于一種單元課程,模塊化課程體系是以知識“必須、夠用”為前提,根據崗位實際需求來確定所學知識的模塊。模塊應該具備獨立、開放、靈活和標準化的特點,所構建的模塊中的教學內容應該合理裁剪,使其能夠平衡教學內容和教學時常的矛盾。確保在合理的教學時間內,通過優化設置模塊,達到最佳的授課效果。
模塊化教學注重能力本位,通過對知識和技能的靈活應用,達到提升學員能力素質和崗位任職能力的要求,課程教學多采用案例教學法、啟發式教學等教學方式。由于無人機任職教育專業涉及到導航控制、數據鏈、飛機、任務設備等多個專業,這些專業的差異性很大。因此,采用模塊化課程,能夠滿足各專業對于崗位任職能力的要求,適應了無人機任職教育的發展。
(二)無人機任職專業模塊化課程構建思路
根據無人機任職教育的特點,結合人才培養目標,無人機任職教育專業教學課程設計為基礎模塊、職業模塊和拓展模塊三個模塊。其中,基礎模塊是各專業必修內容,是“必須,夠用”中必須的一塊;職業模塊是包括滿足所對應專業和職業崗位特殊需求的能力;拓展模塊是滿足學員個性發展需求對高層次人才的部分需求的內容。
三個模塊中,基礎模塊是最基本的,主要內容包括無人機裝備的結構與組成、操作使用,要求所有學習該專業的學員,不論培訓周期長短,都必須掌握;職業模塊是在基礎模塊上的一個疊加,主要內容包括:工作原理、典型故障分析與排除、無人機作戰規劃、無人機作戰運用等內容,主要面向崗位任職需求,學員在該模塊基礎上,能夠勝任崗位任職;拓展模塊是前兩個模塊都掌握的基礎上,根據自身要求,結合自身優點,參加教研室相關的課題研究,該模塊屬于研究型的學習方式。
三個模塊結合了無人機任職教育專業的特點和需求進行設計,既相互聯系但同時又相對獨立,在教學實施過程中,可以根據培訓周期和崗位需求適當增加或刪減,同時也可以增加或更新相應模塊內容,這樣有助于提高學員自身能力,適應未來裝備升級和崗位任職能力變化的特點。endprint
四、無人機任職專業模塊化課程實踐——以無人機數據鏈分系統模塊化課程構建為例
無人機數據鏈分系統是無人機系統重要的組成部分,本文以無人機數據鏈專業模塊化課程的構建為例,說明無人機任職專業模塊化課程的設置。
(一)無人機數據鏈專業特點
現行的無人機數據鏈系統通常采用“四合一測控信息傳輸體制”,分別是遙控、遙測、信息傳輸和跟蹤測量,涉及內容比較多。通過對部隊調研和學員普遍反映,對于無人機數據鏈的相關課程存在的特點就是難,概念抽象,原理復雜,理解起來十分困難。然而,無人機裝備屬于復雜武器系統,從學生素質要求出發,必須是“先懂技術原理,才能操作使用”。
(二)無人機數據鏈專業模塊化課程構建
無人機數據鏈任職專業模塊化課程采取基礎模塊、職業模塊和拓展模塊。具體分類如下:
1.基礎模塊
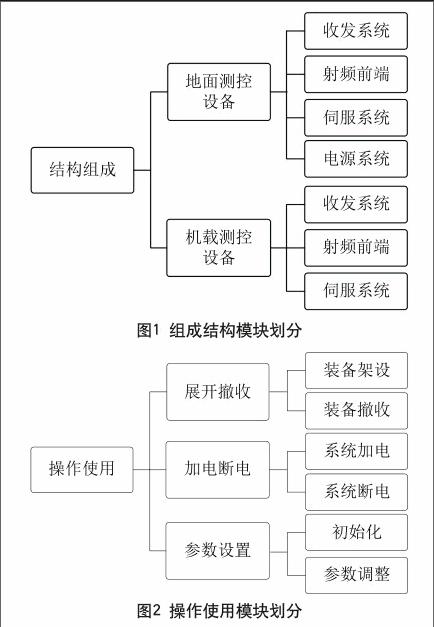
基礎模塊主要包括無人機數據鏈分系統的組成結構和操作使用,圖1和圖2給出了無人機數據鏈分系統組成結構和操作使用模塊劃分。
在圖1的組成結構模塊中,無人機數據鏈分系統組成結構從整體分為地面測控設備和機載測控設備兩大類。其中,地面測控設備又分為收發系統、射頻前端、伺服系統、電源系統四個模塊,機載測控設備只包括三個模塊,這幾個模塊在授課時,主要側重講解系統、或者內部板卡所完成的功能,以及板卡之間、組合之間的連接關系,對于板卡內部的工作原理,對于基礎模塊來說,不做要求,該部分內容主要側重理論教學加部分實裝認知。
在圖2中操作使用模塊中,主要分為展開撤收、加電斷電和參數設置,而展開撤收主要包括裝備的架設和撤收;加電斷電主要包括系統供電、設備加電、設備斷電和系統斷電;參數設置主要包括系統初始化和參數的一些調整,這部分內容主要以實踐教學為主。
2.職業模塊
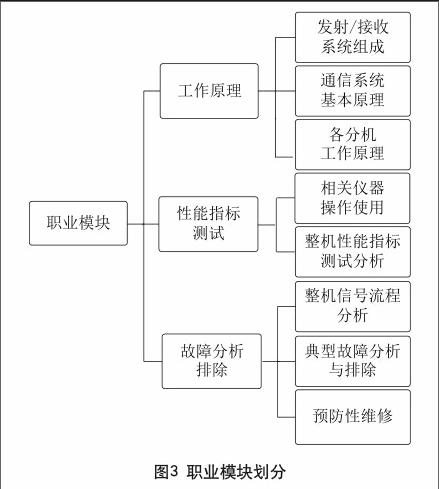
職業模塊主要面向崗位任職需求,課程依據部隊完成崗位任職能力而設置,對于無人機數據鏈分系統而言主要側重于維修保障。主要內容包括:工作原理、性能指標測試、信號流程、典型故障分析排除和預防性維修,圖3給出了職業模塊劃分示意圖。
在圖3中職業模塊主要劃分為工作原理、性能指標測試和故障分析排除。其中,工作原理主要包括發射/接收系統組成、通信系統基本原理和典型板卡工作原理,這一部分內容,可以根據學時的長短和崗位特點適當進行裁剪;性能指標測試包括相關儀器的操作使用和整機性能指標(發射功率、工作頻率和接收機靈敏度)測試,這一部分內容主要為后續故障分析與排除奠定基礎;故障分析與排除主要包括整機信號流程、典型故障分析與排除和預防性維修三個子模塊,在教學實施過程中,包括理論教學和實踐教學。
3.拓展模塊
拓展模塊一般針對培訓周期為10個月的生長干部任職培訓專業,主要是根據學生特點,結合教師需求,雙方采取雙向選擇,建立“導師制”,在學習期間,學生可以參加教研室相關研究課題,也可以和導師共同確定研究課題,對于拓展模塊的內容,相對比較寬泛,屬于研究型教學。
(三)無人機數據鏈專業模塊化課程構建啟示
無人機數據鏈專業采用基礎模塊、職業模塊和拓展模塊構建,這些模塊在具體授課時,可以根據學時長短和崗位培訓任職能力需求合理的定制、裁剪,與傳統學歷教育相比較,能夠避免教學中復雜的理論,突出實用性和裝備保障運用方面的優勢。使得學員既能了解無人機系統的基本知識,又能為后續崗位任職能力打下堅實的基礎,教學更加靈活,滿足了不同培訓層次和培訓周期的任職培訓需求。
五、結語
本文提出了針對無人機任職專業的模塊化課程設計,分為基礎模塊、任職模塊和拓展模塊,同時以無人機數據鏈分系統為例進行了說明。近年來,通過對生長干部任職培訓、現職干部輪訓等多個培訓層次的班次進行了驗證,結果表明,采用模塊化課程教學,各個層次的教學效果良好,教學質量得到了很大的提升。
參考文獻
[1]周道雷.任職教育理論與實踐研究[M].北京:軍事科學出版社, 2009.
[2]蔣乃平.模塊課程及其在課程改革中的應用[J].職業技術教育, 2007(34).
[3]任強,范松.裝備教學兩級教材體系建設的理論探討[J].繼續教育,2013(6).
[4]馬超.中職數學模塊化課程設計及實施研究[D].秦皇島:河北科技師范學院,2013.
[5]閆云斌,劉新海,王永川.基于SystemView的無人機數據鏈實驗系統構建[J].高師理科學刊,2016(7).
[6]徐晨華.無人機系統在陸地邊防警務工作中的應用探析[J].信息化建設,2016(2).
[7]時兆峰.以色列組建專門的無人機管理部門[J].飛航導彈,2001(10).
[8]王楠,王甄,肖強勝.越軍無人機研發與裝備情況研究[J].現代軍事,2015(4).
[9]方秀花.美國無人機項目新進展[J].裝備指揮技術學院學報,2011(5).endprint
猜你喜歡
海洋信息技術與應用(2022年1期)2022-06-05 07:38:22
裝備制造技術(2021年2期)2021-07-21 05:38:44
現代裝飾(2020年5期)2020-05-30 13:01:56
汽車與新動力(2019年5期)2019-11-07 05:20:16
系統管理學報(2018年3期)2018-08-13 01:05:42
中國核電(2017年2期)2017-08-11 08:00:56
流程工業(2017年4期)2017-06-21 06:29:52
流程工業(2017年4期)2017-06-21 06:29:50
石油化工建設(2015年2期)2015-12-01 04:16:44
中國教育技術裝備(2015年10期)2015-03-01 02:41:05