基于移動窗比功率的主動式頭枕控制算法
2017-12-02 01:52:15顏凌波祝志鵬曹立波
中國機械工程 2017年22期
顏凌波 祝志鵬 王 凱 曹立波
1.湖南大學汽車車身先進設計制造國家重點實驗室,長沙,4100822.寧德時代新能源科技股份有限公司,寧德,352000
基于移動窗比功率的主動式頭枕控制算法
顏凌波1祝志鵬1王 凱2曹立波1
1.湖南大學汽車車身先進設計制造國家重點實驗室,長沙,4100822.寧德時代新能源科技股份有限公司,寧德,352000
為減小追尾碰撞中乘員損傷,開發了一款基于加速度信號控制的主動式頭枕。針對其控制系統,提出了移動窗比功率算法。通過與移動窗積分算法和比功率算法進行運算數據對比,分析了其抗干擾性和觸發及時性,并開展了頭枕臺架試驗和后碰撞臺車試驗。結果表明,該算法抗干擾性更強,觸發更及時,其觸發時刻誤差在1 ms以內,能有效避免誤觸發;頭枕可在碰撞發生后52 ms內完全展開,控制系統可在15 ms內發出觸發信號。
主動式頭枕;控制系統;移動窗比功率算法;追尾碰撞
0 引言
據統計,由汽車追尾碰撞引發的頸部損傷率高達77%[1]。在追尾碰撞時,由于身體突然被座椅推向前,而頭部和頸部滯后于身體,引起頸部過度拉伸;之后,身體向前速度超過車速,頭部滑向前方,造成頸部過度彎曲,這是頸部揮鞭傷產生的機理[2]。這種傷害不僅使患者承受巨大的痛苦,也給社會帶來了很大的經濟損失[3]。頭枕作為座椅頂部的延伸,其主要功能是在追尾碰撞中減小頭部和頸部相對向后運動[4],進而降低頭部和軀干的相對運動,從而減小乘員頸部損傷。研究表明,增加頭枕高度、減小頭枕與頭部之間距離,有助于減小頸部損傷[5]。但由于考慮乘員舒適性和側面視野等因素,普通頭枕只能起到13%~18%的頸部保護效果[6]。在追尾碰撞中,頭越早接觸到頭枕,頸部受到嚴重傷害的幾率就越低[7],主動式頭枕由于可以主動靠近頭部,因此能夠及早托住乘員頭部。據統計,主動式頭枕可使乘員頸部傷害減少44%[8]。
目前汽車上使用的主動式頭枕主要有兩種,分別為純機械主動式頭枕和機電一體化主動式頭枕[9]。純機械式的頭枕裝置是借助乘員身體的力量來觸發,但在使用中容易出現誤觸發的問題,并且對身高較低的乘員可能出現不觸發和響應滯后等問題[10]。而對于機電一體化主動式頭枕如預響應式頭枕,通過毫米波雷達預測碰撞的發生,能夠提前觸發頭枕,有效地保護乘員頸部,但其制作成本較高,難以普及[11];另外一種碰撞響應式頭枕能夠依據碰撞的加速度信號來判斷追尾碰撞的發生,信號采集方便,成本較低,對觸發算法要求較高,目前在基礎算法方面已有了一定的發展。
傳統判斷碰撞的算法有加速度峰值法、加速度梯度法、速度變化量法、比功率算法、移動窗積分算法、ARMA模型預報算法等,其中使用范圍較廣的是移動窗積分算法和比功率算法[12]。移動窗積分算法有一定的抗干擾性,但是無法區分碰撞類型,在顛簸路面等惡劣行車工況下容易誤觸發,使用條件有局限性;而比功率算法只考慮了碰撞強度,沒有對碰撞時刻進行控制,因此實際控制中,其觸發時刻不穩定。
綜上所述,本文設計的主動式頭枕采用碰撞響應式。為使其達到最優的安全保護效果,針對其控制系統,提出一種移動窗比功率算法,并對其抗干擾性、觸發及時性進行了相關驗證和比較。
1 頭枕機械結構設計

(a)頭枕閉合圖
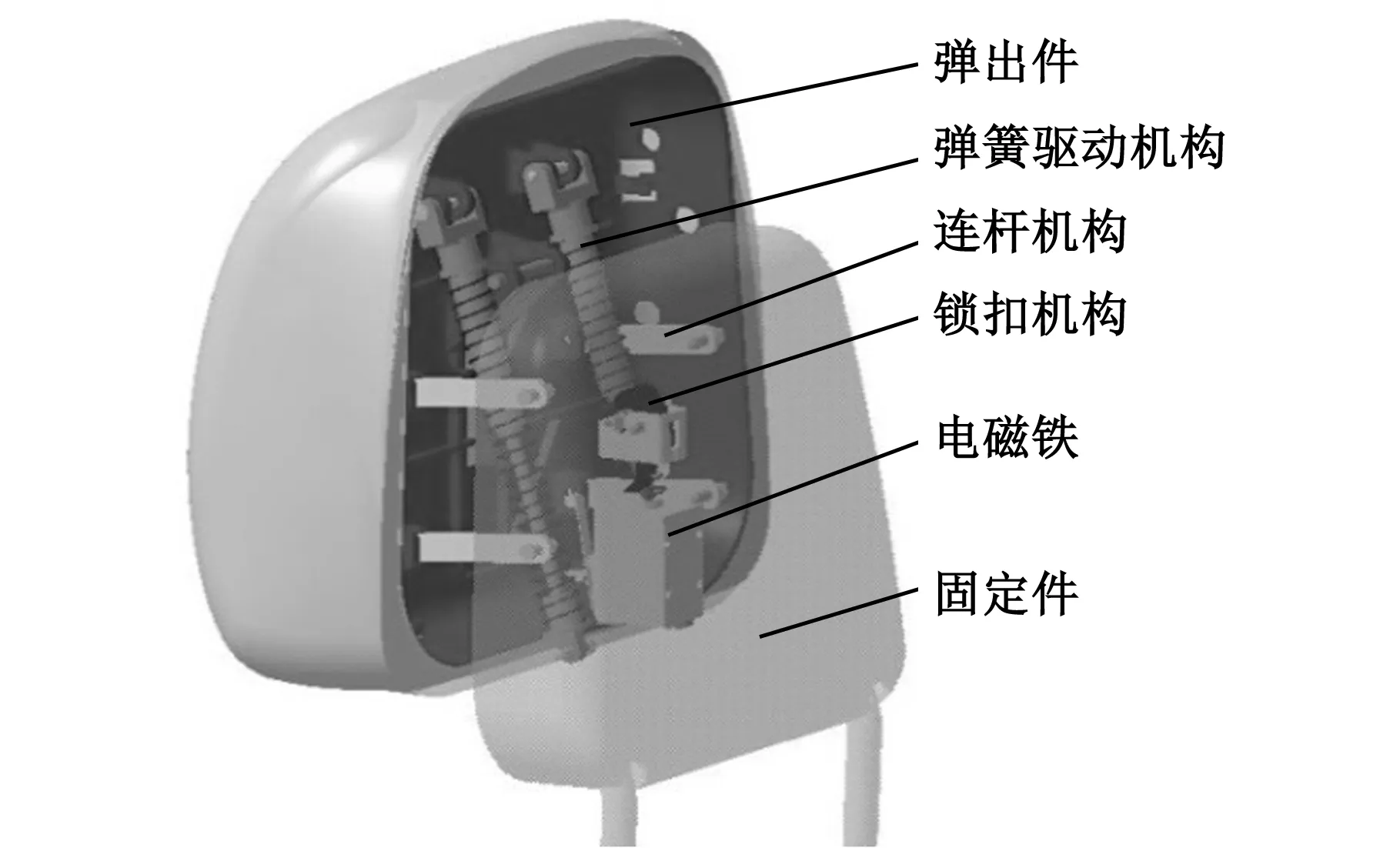
主動式頭枕由固定件、彈出件、彈簧驅動機構、連桿機構、鎖扣機構、電磁鐵等組成,詳細結構如圖1所示。固定件安裝在汽車椅背上,在車輛正常行駛時,頭枕處于閉合狀態;當頭枕檢測到追尾碰撞,而且碰撞強度達到控制系統觸發閾值時,電磁鐵則解除鎖扣機構對頭枕的鎖止,頭枕彈出件在彈簧驅動機構作用下,迅速展開,向上及向前移動,主動靠近乘員頭部,以達到防止或者減輕乘員頸部揮鞭損傷的效果。
(b)頭枕展開圖圖1 頭枕結構圖Fig.1 The structure of the head restraint
基于相對平均男性頭部距離的幾何測量,頭枕的保護效果可分為優秀、滿意、合格、較差四個等級[13],如圖2所示。
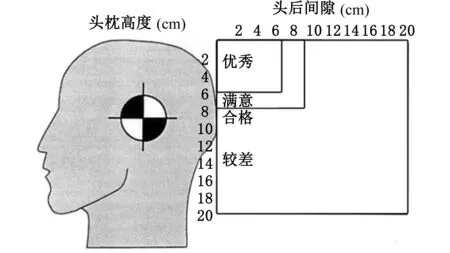
圖2 頭枕評價圖[13]Fig.2 Head restraint evaluations[13]
本頭枕設計的彈開距離為向前向上運動 40 mm。若頭枕初始位置是在可接受最低限度范圍內,即間距小于110 mm,高度大于100 mm,頭枕彈出后,則可歸于優秀這一范疇。
2 移動窗比功率控制算法研究
主動式頭枕要達到良好的保護效果,不僅需要合理的結構設計,而且需要能夠準確控制觸發的控制系統。在控制系統中,控制算法是核心要素,能否準確識別追尾碰撞并及時觸發頭枕使其彈開,是衡量其算法優劣的關鍵。
2.1追尾碰撞加速度信號特征分析
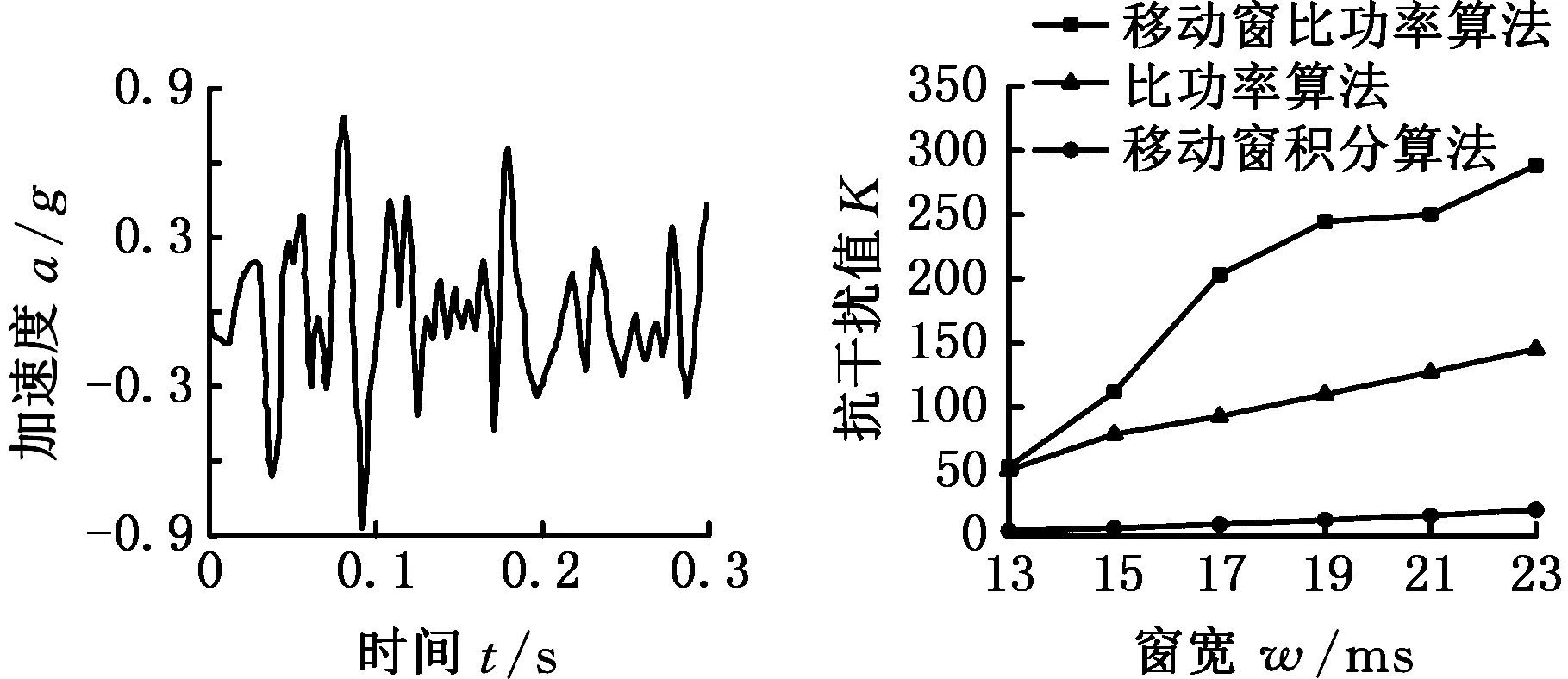
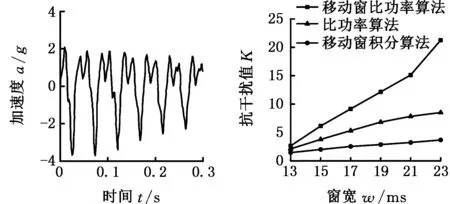
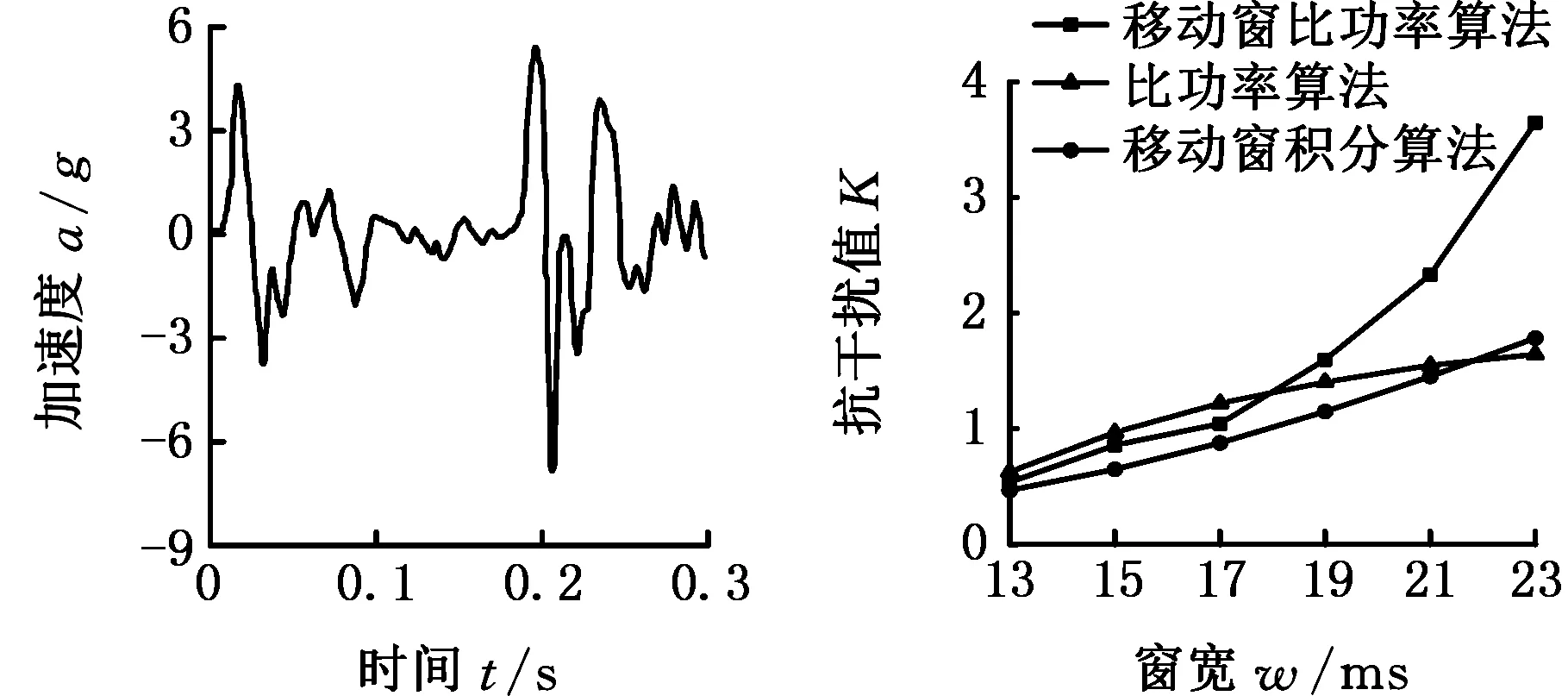
關于控制算法,本研究是基于追尾碰撞響應提出的。模擬追尾碰撞的C-NCAP鞭打試驗加速度曲線如圖3所示[14],歐洲Euro-NCAP的中強度波型以及美國IIHS的鞭打試驗波形也均采用該曲線[15]。根據加速度曲線可知,在汽車追尾碰撞發生后30 ms內,其加速度值快速上升,峰值可以達到10g,這與汽車正常行駛的各種工況有明顯不同。由于正碰、側碰等其他碰撞事故類型的加速度方向與追尾碰撞加速度方向不同,因此追尾碰撞加速度信號具有可用于追尾碰撞事故判定的顯著特征[16]。

圖3 C-NCAP鞭打試驗加速度曲線[14]Fig.3 The acceleration curve of C-NCAP whiplash test[14]
2.2移動窗比功率算法
在判斷碰撞事故方面,主動式頭枕觸發算法與安全氣囊點火算法的基本原理大致相同,因此傳統安全氣囊點火算法可以為頭枕控制算法提供重要參考。研究表明,綜合考慮抗干擾性、觸發時刻及濾波要求,最常使用的是移動窗積分算法和比功率算法[12]。移動窗積分算法簡單,運算效率高,但抗干擾性一般。比功率算法較復雜,抗干擾能力強,但是觸發時刻并不穩定。本研究綜合以上兩種算法的優點,提出一種新的算法,即移動窗比功率算法。
移動窗比功率算法是在移動窗積分算法和比功率算法基礎上提出的。移動窗積分算法[17]是對一段時間內的加速度信號進行積分,反映了速度的變化,積分曲線比較平滑。具體公式如下:

(1)
式中,a(t)為加速度信號;t為當前時刻;w為積分窗寬;S(t,w)為移動窗積分值。
在碰撞發生過程中,該算法可以較好地反映車輛能量的變化,但是僅僅依靠速度變化量不能區分碰撞類型,在柱面碰撞或偏置碰撞時容易漏觸發,在汽車緊急制動或在顛簸路面上行駛時,該方法容易誤觸發。
比功率算法[18]綜合了加速度、速度和加速度梯度,抗干擾能力較強,其單位質量下的比功率為
UdP(t)=a(t)2+ΔvJ(t)
(2)
其中,a(t)為加速度;Δv為碰撞過程中,實際車速與初速度之間的速度變化量;J(t)為加速度梯度。由于比功率算法只考慮了碰撞強度,沒有對碰撞時刻進行控制,因此實際控制中,其觸發時刻不穩定。
移動窗比功率算法綜合了以上兩種算法的優點,將式(1)與式(2)融合,提出一種新的運算公式:
(3)
式中,Y(t,w)為移動窗比功率積分值。
式(3)是對比功率信號在當前時刻t和當前時刻前w時長范圍內進行積分,算法含義是功率的變化量。當功率變化量超過預先設定的閾值時,則發出觸發信號,該算法融合了加速度信號、速度變化量信號及加速度梯度信號,因此抗干擾性較強。又由于該算法只存儲和處理當前時刻之前w時間段內的比功率值,因此其運算效率高。
2.3移動窗比功率算法抗干擾性分析
抗干擾性是衡量算法能否準確檢測追尾碰撞工況的首要指標。為驗證移動窗比功率算法的優越性,本文對移動窗積分算法、比功率算法以及移動窗比功率算法在復雜路面工況的抗干擾性進行了對比。首先本文以C-NCAP鞭打試驗加速度波形為運算對象,從碰撞開始時刻(0時刻)以不同的窗寬分別用移動窗積分算法、比功率算法和移動窗比功率算法進行一次運算,得到各窗寬終點時刻值。若窗寬短,則速度變化量較小,不容易區別;若窗寬長,則觸發及時性降低,而鞭打試驗加速度波形在碰撞后30ms內即可以達到峰值。由此,本文設置的窗寬大小分別為13 ms、15 ms、17 ms、19 ms、21 ms和23 ms。之后,通過查閱文獻獲取汽車以60 km/h通過卵石路、60 km/h通過搓板路、50 km/h通過110 mm臺階及60 km/h通過石塊路的加速度曲線[19]。
為便于對各算法抗干擾性進行對比,本文提出了抗干擾值K的概念,定義其計算公式為
K=Af/Amax
(4)
式中,Af算法在鞭打試驗工況下各窗寬終點時刻值;Amax為算法在路面干擾工況下相應窗寬內最大運算值。
圖4~圖7為實車行駛在不同路面上,干擾加速度及各算法抗干擾值曲線。從圖中可以看出移動窗比功率算法曲線均在移動窗積分算法之上,說明其抗干擾性優于移動窗積分算法。盡管隨著窗寬的增加,三種算法抗干擾性都在增強,但在窗寬大于等于19 ms后,移動窗比功率算法抗干擾性明顯優于移動窗積分算法及比功率算法。由此可見,移動窗比功率算法抗干擾性較好。
(a)路面干擾加速度曲線(b) 三種算法抗干擾值對比圖4 汽車60 km/h通過卵石路的行駛情況Fig.4 The driving conditions through peb ble road at 60 km/h
(a)路面干擾加速度曲線(b) 三種算法抗干擾值對比圖5 汽車60 km/h通過搓板路的行駛情況Fig.5 The driving conditions through washboard road at 60 km/h
(a)路面干擾加速度曲線(b) 三種算法抗干擾值對比圖6 汽車50 km/h通過110 mm臺階的行駛情況Fig.6 The driving conditions through 110 mm-step at 50 km/h

(a)路面干擾加速度曲線(b) 三種算法抗干擾值對比圖7 汽車60 km/h通過石塊路的行駛情況Fig.7 The driving conditions through stone road at 60 km/h
2.4移動窗比功率算法的窗寬及閾值
在移動窗比功率算法中,窗寬和閾值是兩個關鍵參數,若選擇不合理會影響算法的控制準確性和及時性。從圖4~圖7中可以看出,汽車以50 km/h通過110 mm臺階產生的干擾加速度最大,設定為工況1。為增強頭枕的抗干擾性能,本文參照工況1來確定移動窗比功率算法的窗寬和閾值。移動窗積分算法、比功率算法和移動窗比功率算法在C-NCAP鞭打試驗工況下首次運算后各窗寬終點時刻值、在工況1下的相應窗寬內最大運算值以及在各窗寬處的抗干擾值如表1所示。
由式(4)可知,抗干擾值大于1時才可以承受不正當干擾。比功率算法及移動窗比功率算法在窗寬17 ms時即可超過此抗干擾值,而移動窗積分算法則在19 ms左右才能達到。在窗寬為23 ms時,移動窗積分算法、比功率算法的抗干擾值均小于1.8,而移動窗比功率算法接近3.7。窗寬越大,則程序運算量越大,檢測時間越長。在保證抗干擾性的前提下,綜合考慮算法觸發及時性,本文將窗寬設定為23 ms。

表1 三種算法在各窗寬下的各項數值
對于閾值的設定,同樣由式(4)可知,其大小應設定在工況1下該窗寬處算法最大運算值與鞭打試驗工況下算法在該窗寬終點時刻值之間。基于閾值的區間特性,本文設定一個安全因子,以工況1下該窗寬處算法最大運算值為基值,將該最大值與安全因子相乘得到閾值。安全因子大小應在能承受不正當干擾的最小抗干擾值1與最大抗干擾值3.7之間。綜合考慮抗干擾性及觸發及時性,本文將安全因子設定為2。工況1下,該窗寬內的移動窗比功率最大運算值為275.4450。因此閾值設定為:275.4450×2≈276×2=552。
2.5移動窗比功率算法觸發及時性分析
頭枕能否盡早接觸頭部以減小頭部相對頸部的剪切力,對減輕或防止頭部揮鞭損傷至關重要。因此本文又對移動窗積分算法、比功率算法以及移動窗比功率算法的觸發及時性進行了對比分析。為探究各算法識別追尾碰撞所需時間的差異,首先以某次模擬追尾碰撞的臺車試驗加速度波形為對象(圖8),分別采用移動窗積分算法、比功率算法和移動窗比功率算法以23 ms窗寬進行運算。工況1下各算法在該窗寬內的最大運算值如表1所示,以此為基值,安全因子均設定為2,然后進行閾值設定。移動窗積分算法觸發閾值為56.5113×2=113.0226≤114,按照114設定;比功率算法觸發閾值為73.3368×2=146.6736≤147,按照147設定;移動窗比功率算法觸發閾值是275.4450×2=550.89≤552,按照552設定。

圖8 臺車試驗加速度曲線Fig.8 The acceleration curve of sled test
按照設定的觸發閾值,在移動窗積分算法、比功率算法及移動窗比功率算法運算值與時間的對應關系中求得相應觸發時刻。三種算法識別碰撞所需理論時間如表2所示。通過對比三種算法觸發時刻可見,移動窗比功率算法觸發時刻最早,因此觸發及時性有較大優勢。
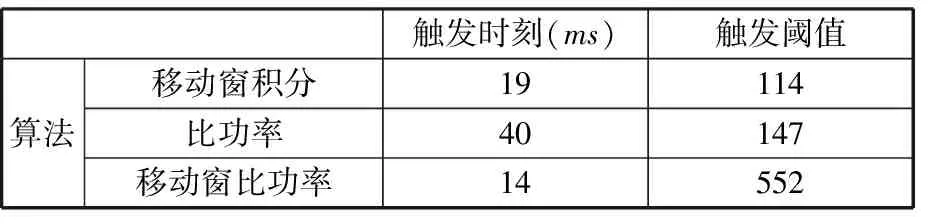
表2 三種算法的理論觸發時刻
3 主動式頭枕控制算法軟件實現
頭枕控制系統的軟件開發工具采用的是CodeWarrior仿真調試軟件,選用16位Freescale MC9S12G48主芯片進行模塊化程序設計,并在線仿真、調試。
軟件系統設計主要包括主函數、鎖相環升頻函數、A/D轉換函數、輸出比較定時函數、移動窗比功率運算函數、閾值判斷與觸發函數。
依據頭枕控制算法特點制定其控制流程。單片機實時采集加速度信號,利用A/D轉換模塊將模擬信號轉化為數字信號。若單片機采樣周期為T,則以nT表示當前采樣時刻,其加速度為an,相鄰前一個采樣時刻為(n-1)T,其加速度為an-1。在本研究中,單片機主循環程序每隔0.5 ms采集一次加速度信息,因此在設定的窗寬23 ms時間間隔內,將有46個數據在移動窗窗格內。速度變化量Δvn可以通過移動積分法求得[20],即
(5)
為了增加主芯片的工作效率,在計算下一個速度變化量Δvn+1時,可首先通過梯形求積法求加速度an+1與an之間的梯形面積Sn+1,含義為(n+1)T時刻與nT時刻之間的速度變化量。當前速度變化量Δvn加上剛移入移動窗的梯形面積Sn+1,減去剛移出的小梯形S1,就可以得到(n+1)T時刻與2T時刻之間速度變化量Δvn+1,即
Δvn+1=Δvn+Sn+1-S1
(6)
加速度梯度含義為加速度變化率,通過其定義可以得出梯度J(n)計算公式:
(7)
同樣,由比功率定義可知,其計算公式可以表示為
(8)
因此,移動窗比功率可表示為
(9)
程序流程如圖9所示。單片機依次讀入一個新數據(即加速度an),之后分別用移動積分法和梯度定義求得速度變化量Δvn和加速度梯度J(n)。將速度變化量和加速度梯度的乘積與加速度的平方值相加,得到比功率值UdP(n)。在設定的窗寬內,對比功率進行積分計算,得到移動窗比功率Y(n)。將其與算法預先設定的閾值比較,若超過閾值,則立即發出觸發信號,解除電磁鐵對鎖扣的鎖止,進而展開頭枕。當碰撞工況結束后,可以手動將頭枕復位至閉合狀態,等待下一次觸發。

圖9 程序流程圖Fig.9 The program flow chart
4 控制算法試驗驗證
4.1頭枕臺架試驗
為了測試頭枕控制系統的準確性,本研究設計了一款頭枕試驗臺架,其機械結構如圖10所示。運動原理為絲杠前端與鎖扣后端軸承連接,鎖扣卡住座椅平臺后端銷子,絲杠順時針旋轉,拉動座椅沿導軌向后移動,同時壓縮彈簧。鎖扣釋放時,頭枕平臺在壓縮彈簧作用下沿導軌向前加速運動。在試驗過程中通過改變彈簧壓縮量,可以調節頭枕的加速度峰值大小。本文以不同的彈簧壓縮量進行了七組頭枕臺架試驗,并通過數據采集儀采集電路板加速度傳感器信號及頭枕觸發信號。試驗結果如表3所示。

圖10 頭枕試驗臺架Fig.10 The bench of the head restraint

試驗組別實際觸發時刻(s)理論觸發時刻(s)實際觸發時移動窗比功率大小觸發電壓(V)誤差(ms)是否觸發12.94552.946564.3364.7906+0.5是22.71752.717607.0944.7711-0.5是34.11204.113576.9364.9061+1.0是44.10454.104655.4245.0465-0.5是54.01654.017760.5584.9821+0.5是63.01503.015619.4215.12000是700否
從表3中看出,前六組試驗均已觸發,實際觸發時移動窗比功率大小均超過閾值552,其中有四組理論與實際觸發時刻存在誤差,但誤差在1 ms之內。第七組試驗,頭枕沒有被觸發,其移動窗比功率曲線最大值約為213,小于閾值552。通過測試結果可知七組試驗完全符合標準觸發要求,由此表明本研究設計的控制系統是準確的。
4.2后碰撞臺車試驗
后碰撞臺車試驗可以更加真實地模擬后碰撞事故。本研究開展了后碰撞臺車試驗以進一步檢驗控制系統的準確性、測試其反應時間,并觀察頭枕機械結構在碰撞中的響應。
首先,在試驗前,將臺車質量配置到685 kg,吸能筒長度520 mm,直徑112 mm,壁厚1 mm,材料選用Q235,單管焊接于臺車前板中央。將頭枕安裝在固定于臺車的座椅上,頭枕控制板反向安裝在臺車車架上,并將觸發開關貼在吸能桶最前端。利用數據采集儀采集控制板加速度傳感器信號及頭枕觸發信號。當吸能桶與剛性墻發生碰撞時,數據記錄儀開始啟動并記錄碰撞數據。試驗中,將臺車的碰撞速度設定為15.6 km/h。
在碰撞過程中使用高速攝像記錄頭枕的運動情況,其展開過程如圖11所示。頭枕在碰撞發生后,28 ms時開始動作,52 ms內完全展開。

圖11 頭枕展開過程Fig.11 The bounce process of the head restraint
臺車碰撞前后效果如圖12所示。將后碰撞臺車試驗加速度曲線與KRAFFT等[21]記錄的真實后碰撞加速度波形進行對比,如圖13所示。由圖可見,其峰值大小、波形走勢及碰撞響應時間均有較高的相似性。
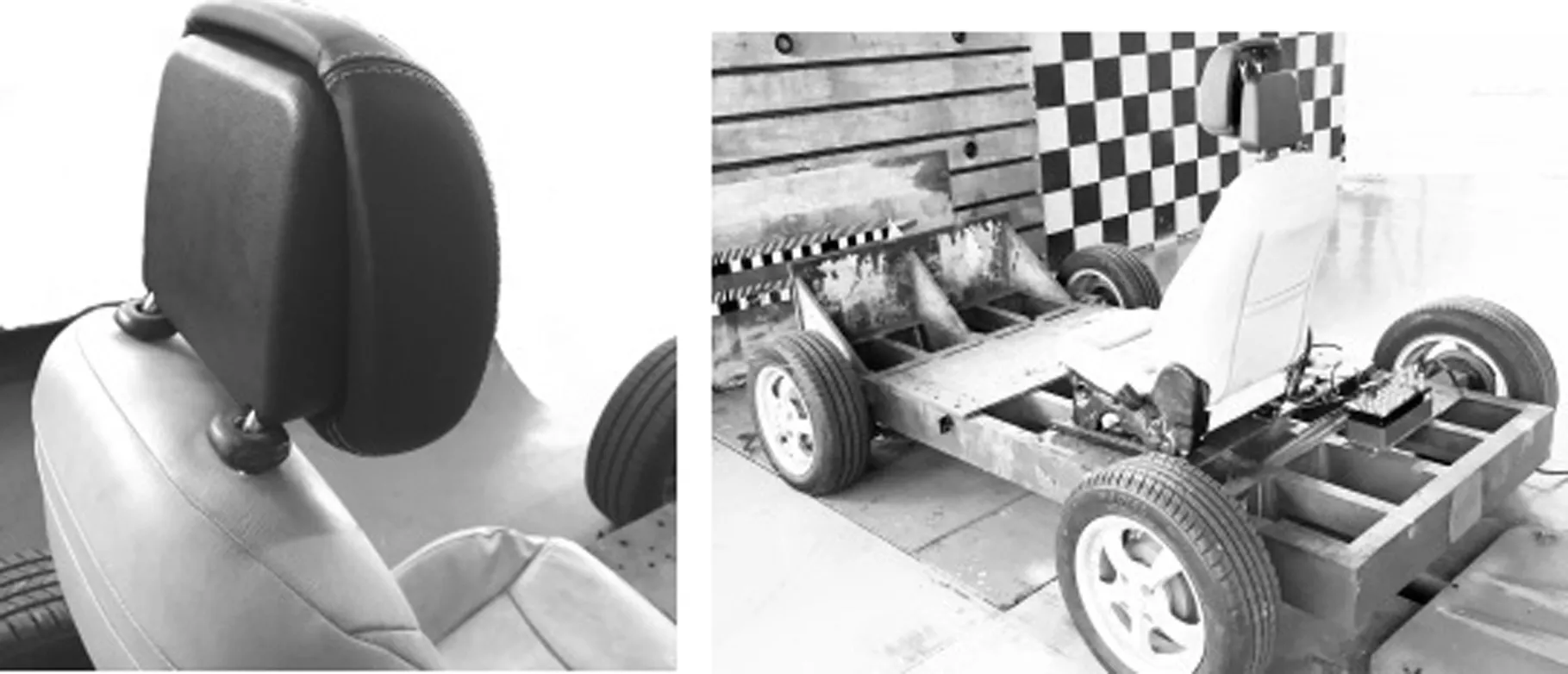
(a)試驗前 (b)試驗后圖12 后碰撞臺車試驗Fig.12 Rear impact sled test
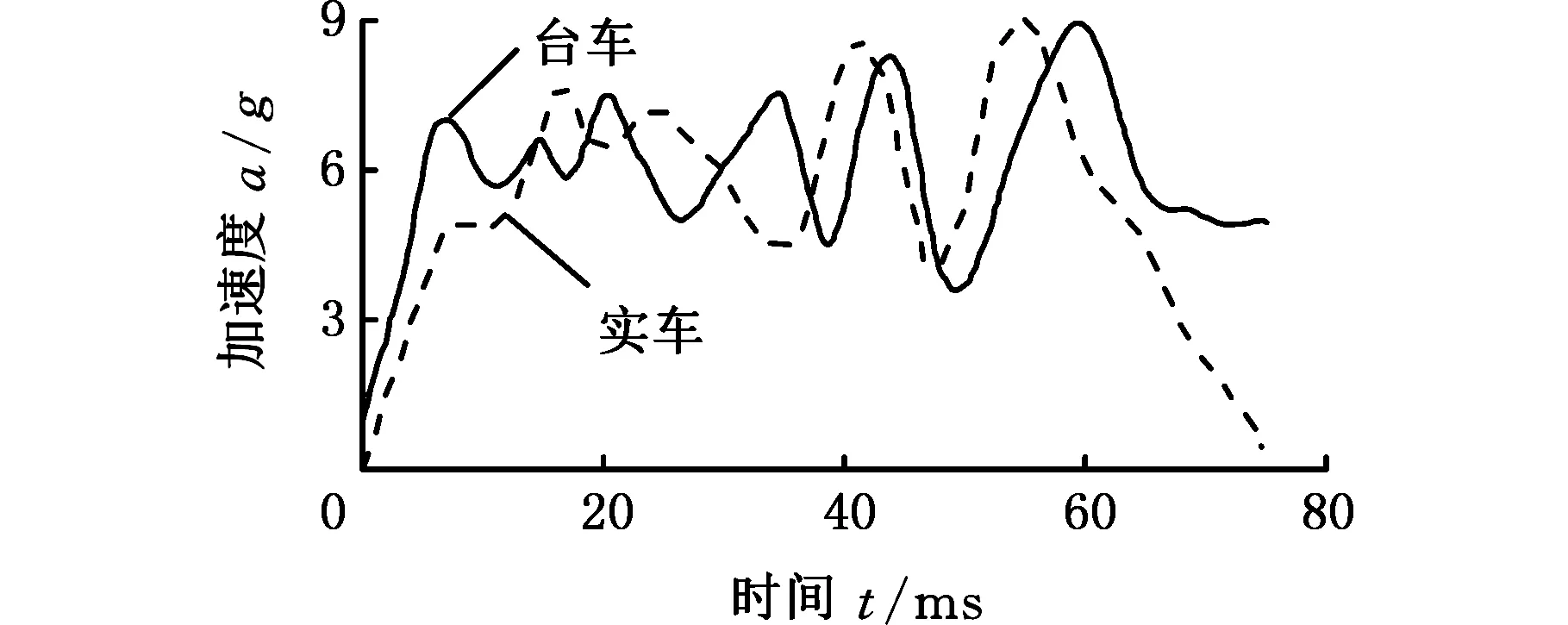
圖13 后碰撞臺車與后碰撞實車加速度對比曲線Fig.13 The acceleration contrast curve of the rear impact sled test and the real vehicle rear impact
后碰撞臺車試驗加速度曲線以及觸發信號曲線如圖14所示,可以發現,頭枕實際觸發時刻為0.0150 s,對應的觸發電壓值為5.0263 V。以后碰撞臺車試驗加速度為基礎,獲得的移動窗比功率曲線如圖15所示,可以看出,頭枕理論觸發時刻為0.0140 s,對應算法運算值為563.8780;整個控制系統延遲觸發1 ms,表明控制系統具有較高的準確性。
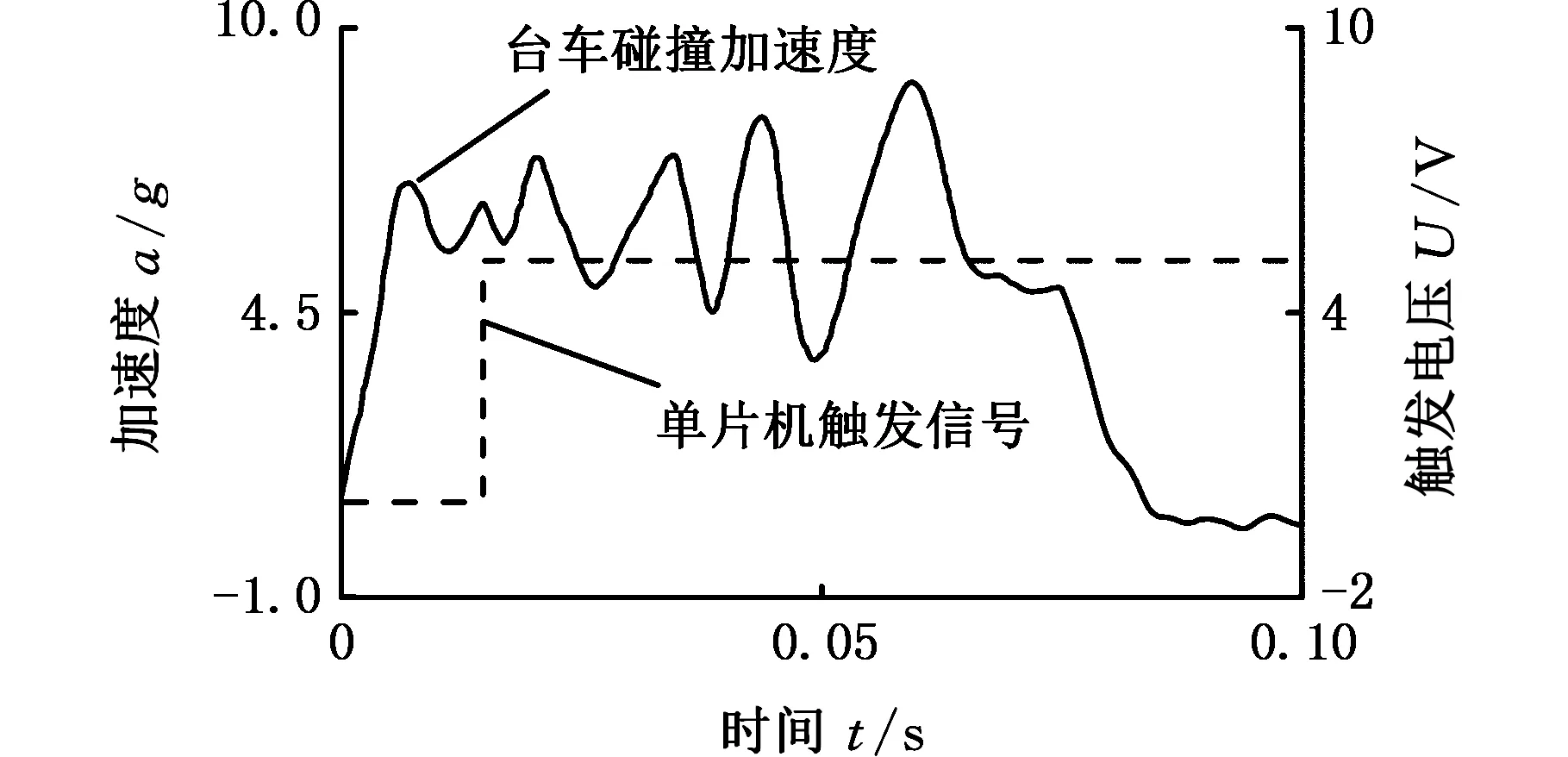
圖14 后碰撞臺車試驗加速度曲線以及觸發信號曲線Fig.14 The acceleration curve of the rear impact sled test and the curve of the trigger signal
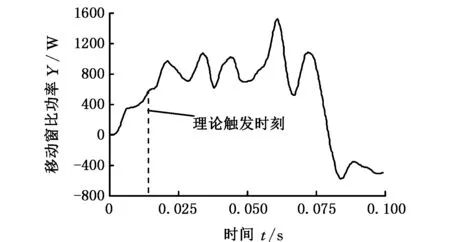
圖15 后碰撞臺車試驗移動窗比功率曲線Fig.15 The moving window specific power algorithm curve of the rear impact sled test
綜上所述,頭枕控制系統在該種工況下,可在15 ms內完成追尾碰撞識別,并發出信號。由圖11可知,頭枕系統總響應時間為52 ms,頭枕完全展開需要24 ms,則電磁鐵動作時間為13 ms。 HIMMETOGLU[22]的后碰撞仿真研究表明,不同座椅和不同碰撞波型下,乘員首次接觸頭枕的時間為55~90 ms不等,本頭枕的響應時間小于該接觸頭枕時間的下限值,因此可以在后碰撞事故中使乘員頭部提前得到頭枕的支撐,減少頸部損傷。
5 討論
本文主要對主動式頭枕的控制算法進行研究,以提高觸發的準確性和及時性,對頸部保護具有實際的指導意義,對追尾碰撞預測系統的開發也有較好的參考價值。本課題組的仿真分析研究結果表明,所設計的主動式頭枕在追尾碰撞中只要能及時正確彈開,就可以使乘員頸部損傷指數NIC 值相比固定式頭枕降低 33.8%[23],對乘員頭頸部有明顯的保護作用。在本研究中,因缺少適用于后碰撞的Bio RIDⅡ假人,暫時不能驗證本主動式頭枕對假人的保護效果,存在一定局限性,后續研究可針對坐姿假人的頭枕保護效果繼續進行試驗驗證。
6 結論
(1) 開發了基于加速度信號控制的碰撞響應式頭枕,該頭枕能夠在追尾碰撞時及時彈出托住頭部,以有效保護乘員頸部。
(2)設計了以移動窗比功率算法為核心的控制系統,確定了算法的窗寬和閾值,通過與移動窗積分算法及比功率算法進行對比,驗證了該算法的抗干擾性、觸發及時性與以上兩種算法相比都有較大優勢。
(3)通過頭枕臺架試驗和后碰撞臺車試驗確認了該算法的有效性,頭枕觸發時刻誤差在1 ms以內,其控制系統可在15 ms內完成追尾碰撞工況識別,頭枕總響應時間為52 ms。
[1] MATSUBAYASHI K, YAMAD Y, IYODA M, et al. Development of Rear Pre-crash Safety System for Rear-end Collisions[C]//20th International Technical Conference on the Enhanced Safety of Vehicles (ESV).Lyon, 2007:145-146.
[2] DEGRAVELLES W D, KELLEY J H. Injuries Following Rear-end Automobile Collisions[M]. Springfield: Thomas, 1969:30-46.
[3] LOCKE G, VEINE E, MERKLE A, et al. Influence of Seatback Content and Deflection on FMVSS 202a Dynamic Response[C]//21st ESV Conference. Stuttgart, 2009: 300-324.
[4] MAHER J. Report Investigating the Importance of Head Restraint Positioning in Reducing Neck Injury in Rear Impact.[J]. Accident Analysis amp; Prevention, 2000, 32(2):299-305.
[5] 肖志, 楊濟匡. 汽車低速追尾碰撞中乘員動力學響應和頸部損傷的仿真研究[J]. 中國機械工程, 2007, 18(10):1239-1243.
XIAO Zhi, YANG Jikuang. Simulation on the Occupant Kinematics Response and Neck Injuries During Low Speed Rear Impacts [J]. China Mechanical Engineering, 2007, 18(10):1239-1243.
[6] STEMPER B D, YOGANANDAN N, PINTAR F A. Effect of Head Restraint Backset on Head-Neck Kinematics in Whiplash[J]. Accident Analysis amp; Prevention, 2006, 38(2):317.
[7] CAMERON M H. The Effect of Australian Design Rule 22a for Head Restraints[EB/OL]. Melbourne: Department of Transport, Office of Road Safety, 1980.[2016-12-01]. https://infrastructure.gov.au/roads/safety/publications/1980/pdf/ADR_Head_2.pdf
[8] FARMER C M, WELLS J K, LUND A K. Effects of Head Restraint and Seat Redesign on Neck Injury Risk in Rear-end Crashes[J]. Traffic Injury Prevention, 2003, 4(2):83-90.
[9] 韓帥,孫聰,師玉茹,等. 車輛座椅系統防揮鞭傷性能的優化方案綜述[J]. 機電產品開發與創新,2015(6):31-33.
HAN Shuai, SUN Cong, SHI Yuru, et al. Vehicle Seat System Anti Wave Stripes Performance Optimization Solutions Were Reviewed[J]. Development amp; Innovation of Machinery amp; Electrical Products, 2015(6):31-33.
[10] KULLGREN A, KRAFFT M. The Effect of Whiplash Protection Systems in Real-life Crashes and Their Correlation to Consumer Crash Test Programmes[C]// 20th International Technical Conference on the Enhanced Safety of Vehicles (ESV).Lyon, 2007: 1-7.
[11] 陳亞. 主動式頭枕機械及控制系統研究[D].長沙:湖南大學,2014.
CHEN Ya. Research on Mechanical and Control System of Active Head Restraint[D].Changsha:Hunan University,2014.
[12] 殷文強,王玉龍,徐盼盼,等. 汽車安全氣囊點火算法綜述[J]. 汽車工程學報, 2013, 3(2):79-87.
YIN Wenqiang, WANG Yulong, XU Panpan, et al. Review of Ignition Algorithms of Vehicle Airbag[J].Chinese Journal of Automotive Engineering, 2013, 3(2):79-87.
[13] CHAPLINE J F, FERGUSON S A, LILLIS R P, et al. Neck Pain and Head Restraint Position Relative to the Driver’s Head in Rear-end Collisions[J]. Accident Analysis amp; Prevention, 2000, 32(2):287-297.
[14] C-NCAP管理中心.C-NCAP管理規則(2012版)[S].天津:中國汽車技術研究中心,2012.
C-NCAP Administration Center. C-NCAP Management Rules(2012 Vers.) [S]. Tianjin: China Automobile Technology and Research Center, 2012.
[15] 張亮, 王鵬翔, 王增山,等. C-NCAP鞭打試驗初定標準探討[C]//International Forum of Automotive Traffic Safety.Wuhan,2010:395-398.
ZHANG Liang, WANG Pengxiang, WANG Zengshan, et al. A Discussion on Preliminary Whiplash Standard of C-NCAP[C]//International Forum of Automotive Traffic Safety. Wuhan, 2010:395-398.
[16] 曹立波,唐明福,蔣彬輝,等. 汽車碰撞事故判斷與新型碰撞吸能裝置控制系統研究[J]. 中國機械工程, 2010,21(13):1618-1623.
CAO Libo, TANG Mingfu, JIANG Binhui, et al. Crash Accident Judgment and Control System of New Crash Energy Absorption Equipment[J]. China Mechanical Engineering, 2010,21(13):1618-1623.
[17] 王建群, 張金換, 黃世霖. 汽車安全氣囊點火控制算的研究[J]. 汽車工程, 1997(1):11-14.
WANG Jianqun, ZHANG Jinhuan,HUANG Shilin. A Study on an Algorithm for Airbag Actuation[J]. Automotive Engineering, 1997(1):11-14.
[18] ALLEN J L. Power-rate Crash Sensing Method for Safety Device Actuation[J]. SAE Technical Papers, 920478.
[19] 楊天偉,鄭維,張金換,等. 汽車安全氣袋的點火電路[J]. 清華大學學報(自然科學版),2002,42(4):527-530.
YANG Tianwei, ZHENG Wei, ZHANG Jinhuan, et al. Ignition Circuit for Automotive Airbag System[J].Journal of Tsinghua Universtity(Scienceamp;Technology), 2002,42(4):527-530.
[20] MAHMUD S M, ALRABADY A I. A New Decision Making Algorithm for Airbag Control[J]. IEEE Transactions on Vehicular Technology, 1995, 44(3):690-697.
[21] KRAFFT M, KULLGREN A. Crash Pulse Recorders in Rear Impacts-real Life Data[C]//ESV Conference. Windsor, 1998: 1256-1262.
[22] HIMMETOGLU S.The Influence of Crash Pulse Shape on Seat-occupant Response in Rear Impacts[J]. Berichte der Bundesanstalt Fuer Strassenwesen Unterreihe Fahrzeugtechnik, 2010(77): 159-175.
[23] 曹立波,李正坤,龔永堅. 主動式安全頭枕的開發與仿真研究[J]. 汽車工程, 2014(6): 746-750.
CAO Libo, LI Zhengkun, GONG Yongjian. A Study on the Development and Simulation on an Active Head Restraint[J]. Automotive Engineering, 2014(6): 746-750.
(編輯王旻玥)
ControlAlgorithmofActiveHeadRestraintsBasedonMovingWindowSpecificPower
YAN Lingbo1ZHU Zhipeng1WANG Kai2CAO Libo1
1.State Key Laboratory of Advanced Design and Manufacture for Vehicle Body,Hunan University,Changsha,410082 2.Contemporary Amperex Technology Co.,Limited Headquarters,Ningde,Fujian,352000
An active head restraint controlled by the acceleration signals was developed to reduce occupant injury in the rear-end impacts. Aiming at the control systems of the restraint, a moving window specific power algorithm was proposed. Its anti-jamming and trigger timeliness were analyzed by comparing operational data with moving window integration algorithm and specific power algorithm respectively, and several tests including head restraint bench tests and rear impact sled tests were conducted. The results show that the algorithm has a robust anti-interference and a timely trigger, its trigger time error is within 1 ms, and that false triggering may be avoided effectively. The control system may send out the control signals within 15 ms, and that the head restraint may be fully expanded 52 ms after the collision.
active head restraint; control system; moving window specific power algorithm; rear-end impact
U461.91
10.3969/j.issn.1004-132X.2017.22.001
2016-12-19
國家自然科學基金資助項目(51605152);湖南大學汽車車身先進設計制造國家重點實驗室開放基金資助項目(31575005);汽車噪聲振動和安全技術國家重點實驗室2015年度開放基金資助項目(NVHSKL-201509)
顏凌波,男,1984年生。湖南大學機械與運載工程學院助理研究員。主要研究方向為汽車碰撞安全。祝志鵬,男,1991年生。湖南大學機械與運載工程學院碩士研究生。E-mail:zzphnu@163.com。王凱,男,1990年生。寧德時代新能源科技股份有限公司工程師。曹立波,男,1964 年生。湖南大學汽車車身先進設計制造國家重點實驗室教授、博士研究生導師。