一種基于kinect體感相機的家庭康復訓練系統
2017-11-27 19:33:34李邦政農旭安李旭昌
科技傳播 2017年21期
李邦政+農旭安+李旭昌


摘 要 在社會老齡化背景下,康復醫生和患者比例失配的情況非常嚴峻。家庭康復系統通過kinect骨骼追蹤技術采集訓練者動作的深度信息,使醫生遠程了解患者訓練進展。借助計算機和互聯網,患者可以咨詢醫師,而醫師可以根據訓練效果通過互聯網遠程指導與開出訓練動作“處方”。患者在家里就可以康復訓練。測試結果表明:該系統病人的康復有積極影響。
關鍵詞 kinect相機;家庭康復訓練;遠程指導
中圖分類號 TP3 文獻標識碼 A 文章編號 1674-6708(2017)198-0148-02
為了促進運動功能障礙患者身體肌能更好恢復,患者在治療出院后仍需在社區或者家庭進行康復訓練。然而運動功能障礙患者的社區康復仍有一些困難:1)上門服務的治療師數量稀少而且收費高;2)患者在缺乏標準、系統的動作輔導情況下自行訓練,科學性不高,效果有限。3)患者需在康復活動中心等特殊環境訓練,且穿戴復雜的訓練設備,對患者來說很不方便。家庭康復系統通過kinect骨骼追蹤技術采集訓練者動作的深度信息;借助計算機和互聯網,患者可以咨詢醫師,而醫師可以根據訓練效果通過互聯網遠程指導與開出訓練動作“處方”,患者在家里就可以康復訓練。
1 系統的使用流程
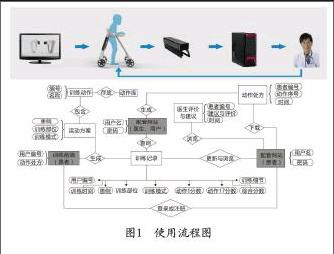
系統硬件由助行車、kinect相機、計算機組成。顯示器顯示的康復動作引導殘疾人系統的完成康復訓練,Kinect傳感器安裝在離人0.4m~8m的范圍內,用于捕捉患者肢體康復動作時肢體和身體的傾斜角度,計算機接收到Kinect傳感器獲取的自動捕捉數據,并與標準康復動作對比,正確的給與語音獎勵,錯誤的給與語音提示。計算機通過網絡實時傳輸給外部計算機,醫生可以根據數據判斷訓練完成情況,并通過計算機遠程指導,如圖1。患者在起立訓練時,液壓彈簧將人體托起,減輕下肢承受力。患者站立起來后,彈力復位皮筋和折疊復位結構將座椅垂直收起,增加患者行走訓練的空間。患者在訓練累時,將座椅水平旋轉90℃,即可在座椅上休息。結束訓練時,將助行車折疊以減少占用空間。系統特別適合下肢力量不足患者的訓練。
2 系統構成
2.1 前端系統模塊
前端系統主要由kinect傳感器和顯示器組成。Kinect是Microsoft公司推出的一款性能極強的傳感器。其核心部件包括紅外投影機、彩色攝像機、紅外深度攝像機和芯片4個部分,捕捉范圍在1m~8m。Kinect傳感器能夠提供的數據信息有:深度信息、視頻和音頻3種。Kinect在系統中的功能主要有:患者數據的輸入和儲存、根據運動障礙一側、康復部位及訓練模式設立康復計劃、進行訓練時的語音提醒。顯示器主要是顯示動作模板和實時顯示患者訓練畫面、訓練結束后通過聊天窗口和PDF文檔反饋訓練結果的評價。
2.2 后臺實時數據處理模塊
數據采集并初步處理后,系統對根據相應關節連線的角度值和位置范圍值對患者的運動數據進行實時評分。數據采集模塊中利用公式計算相聯系的3個關節點連線的夾角,如公式(1):
通過公式(2),當Kinect捕捉關節運動時,系統可以隨時獲取節點之間的相對夾角,從而計算出Δt時間范圍內運動的關節點與圓心關節點的夾角變化Δθ,并假設該運動關節點對應角度范圍的變量為K,K通過公式(2)確定:
在每次數據采集過程中,系統計算當前時間和前Δt時刻的夾角變化Δθ,獲得K的數據并計算,當K=假時繼續捕捉運動關節點所在位置信息,當K=真時顯示相應音頻信息和文字信息提醒,結束并開始下一動作的信息采集。
2.3 動作庫模塊
動作庫由動作模板和評分算法組成,它不僅是整個系統的重要部分,而且是康復訓練前端的核心。動作模板和評分算法分別具有為患者提供訓練引導、為評價用戶訓練情況提供依據的作用。根據每個動作的特點,選取評分要點,如關鍵部位夾角、關節位置的范圍值以及不同關節點位置關系等。動作庫如表1。
2.4 患者動態實時火柴人顯示模塊
將系統設定Kinect采集信息為30幀/秒,且在顯示器動態實時播放含有20個人體關節點的火柴人的畫面,患者可以參照火柴人的畫面了解自己訓練動作是否標準并及時作出調整。Kinect骨骼追蹤技術所采集的共有人體20個關節點。
2.5 中心網站和網絡交流模塊
開發中心網站的目的是為了方便患者查閱個人訓練情況、醫生意見、下載新“康復處方”、醫生可以查詢患者資料并遠程指導訓練。網站包含3個部分:1)公共部分,包括首頁、登陸頁面和注冊頁面。2)患者用戶部分,包括患者登陸后的總頁與集合在該頁的各功能頁,如圖4。3)醫生用戶部分,包括醫生登陸后的總頁與集合在該頁的各功能頁。
2.6 助行車
助行車主要用于輔助患者起立、行走和原地休息。患者在起立訓練時,液壓彈簧將人體托起,減輕下肢承受力。患者站立起來后,彈力復位皮筋和折疊復位結構將座板垂直收起,增加患者行走訓練的空間。患者在訓練累時,將座板水平旋轉90°,即可在座椅上休息。結束訓練時,將助行車折疊以減少占用空間。整體效果圖如圖2。
3 系統測試
為了檢驗系統的穩定性和可靠性,分別選取肘關節屈曲、雙手合并、肘關節屈曲加平移、頭部360°轉動等4個動作,每個動作測試100次。對比實際動作與系統識別是否準確。結果表明系統對肘關節屈曲、雙手合并動作能完全識別,而小肘關節屈曲加平移、頭部360°轉動5次識別不出。其原因是測試人員動作較快而系統識別發生誤差。總體而言該系統的穩定性和可靠性能夠滿足患者需要。
4 結論
在社會老齡化,運動性功能障礙患者逐年增多而醫護人員緊缺的背景下,家庭康復訓練系統能解放醫生的勞動力,提高患者康復效果。它在優良的人機交互、醫患之間良性互動的基礎上,對病人的康復有積極的影響。測試結果表明,該系統的穩定性和可靠性符合設計要求,具有一定的應用價值。
參考文獻
[1]姚倩,王麗,侯筱婷.基于Kinect的自主康復系統的設計與實現[J].電子產品世界,2015(8):37-39.
[2]楊藝,許源,張俊杰,等.基于Kinect與虛擬現實的社區家庭康復系統的研制[J].微型電腦應用,2014,30(3):32-34.
[3]姜振興.基于Kinect的人體康復系統研究與設計[D].青島:中國海洋大學,2015.endprint