EHA半主動懸架時滯補償控制研究*
2017-11-24 13:32:07寇發榮王哲范養強杜嘉峰李冬
汽車技術 2017年10期
寇發榮 王哲 范養強 杜嘉峰 李冬
(西安科技大學,西安 710054)
EHA半主動懸架時滯補償控制研究*
寇發榮 王哲 范養強 杜嘉峰 李冬
(西安科技大學,西安 710054)
為了改善汽車平順性,設計了車輛電動靜液壓(EHA)半主動懸架結構。計算了EHA半主動懸架系統臨界時滯,分析了時滯的影響。提出了一種改進型Smith時滯預估補償器,并將其應用于模糊控制EHA半主動懸架的時滯補償,進行了仿真分析和試驗驗證。結果表明,改進型Smith預估補償器能夠對補償環節的懸架模型參數誤差進行修正,提高了懸架系統的抗干擾能力,可有效減小時滯對該半主動懸架的影響,從而改善其動態性能。
1 前言
懸架是汽車底盤重要的組成部分之一。汽車懸架分為主動懸架、半主動懸架和被動懸架。半主動懸架的減振效果介于被動懸架和主動懸架之間,但能耗較低,引起了國內外學者的廣泛關注[1~4]。
研究表明,時滯是干擾半主動懸架動態性能的主要因素之一[5]。文獻[6]通過建立含時滯半主動懸架系統仿真模型,分析得到了時滯對懸架系統的影響規律。文獻[7]采用預瞄控制策略對含時滯主動懸架進行研究,結果表明,時滯量較大會造成系統控制效果惡化,但未考慮時滯補償環節懸架模型的誤差對系統的影響。
針對以上問題,本研究設計了電動靜液壓(Electro-Hydrostatic Actuator,EHA)車輛半主動懸架結構[8],通過計算EHA半主動懸架系統的臨界時滯,分析時滯對EHA半主動懸架幅頻特性和減振效果的影響,提出一種改進型Smith預估補償器,將其用于模糊控制EHA半主動懸架的時滯補償,并利用臺架試驗驗證時滯補償器的有效性。
2 含時滯EHA半主動懸架動力學模型
2.1 EHA半主動懸架結構與原理
EHA半主動懸架的基本結構如圖1所示,主要由螺旋彈簧和EHA作動器兩部分組成。EHA作動器由液壓缸、液壓泵、無刷直流電機、控制器構成。同時在車身上安裝有加速度傳感器,用來檢測當前車輛的運動狀態并將信號反饋給控制器。在車身的振動作用下,液壓缸隨動工作,該懸架系統工作在被動狀態,系統阻尼力由液壓系統的基值阻尼力提供。控制器采集傳感器信號,根據模糊控制規則改變電機回路中的外接負載阻值,從而改變電機的電磁轉矩大小,使液壓缸產生的可控阻尼力得到控制,從而實現EHA半主動懸架系統的閉環運動控制。
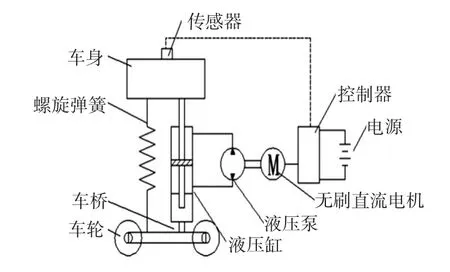
圖1 EHA半主動懸架結構原理
2.2 含時滯EHA半主動懸架力學模型的建立
根據圖1中EHA半主動懸架的基本結構,建立該懸架車輛二自由度動力學模型,如圖2所示。
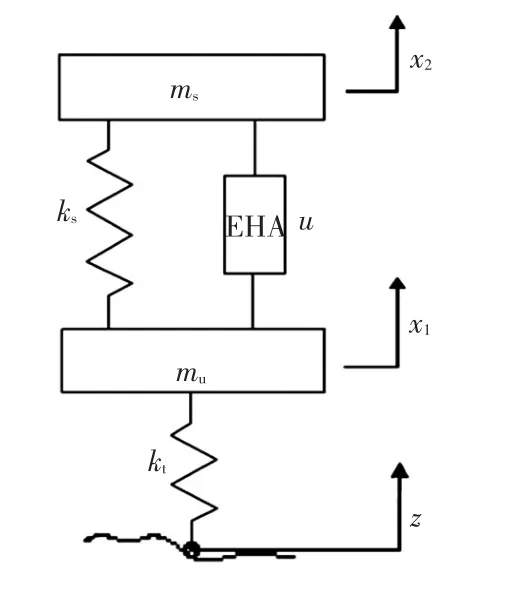
圖2 EHA半主動懸架系統二自由度模型
該懸架減振器的阻尼力u分為基值阻尼力Fs和可控阻尼力Fr。設EHA半主動懸架系統的可控阻尼系數為cr,基值阻尼系數為cs,控制系統的時滯為τ,則:

含時滯EHA半主動懸架汽車二自由度動力學方程為:
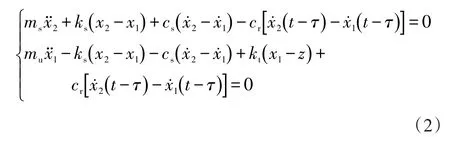
式中,z為路面輸入激勵;kt為輪胎剛度系數;ks為懸架剛度系數;mu為非簧載質量;ms為簧載質量;x1為非簧載質量位移;x2為簧載質量位移。
2.3 含時滯EHA半主動懸架臨界時滯計算
EHA半主動懸架系統的臨界時滯是系統由漸進穩定狀態到失穩的臨界時滯值,根據微分方程解的存在條件得到式(2)的非零解特征方程:
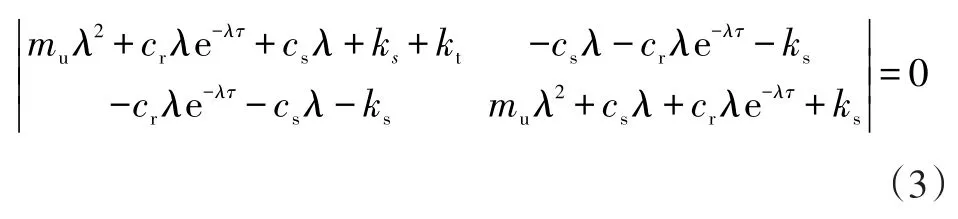
該系統臨界失穩條件是特征方程式(3)存在純虛根λ=iω。將λ=iω代入式(3),同時分離實部和虛部,得到純虛根的存在條件[9]:

對式(4)進行求解,得到EHA半主動懸架的臨界時滯:

當EHA半主動懸架參數一定時,根據式(5)可得可調阻尼cr與臨界時滯τ的關系,如圖3所示。由圖3可以看出,當基值阻尼cs一定時,臨界時滯τ隨可控阻尼cr的增大而減小,同時臨界時滯τ減小的幅度由大到小,當系統可控阻尼足夠小時,系統進入全時滯穩定狀態。
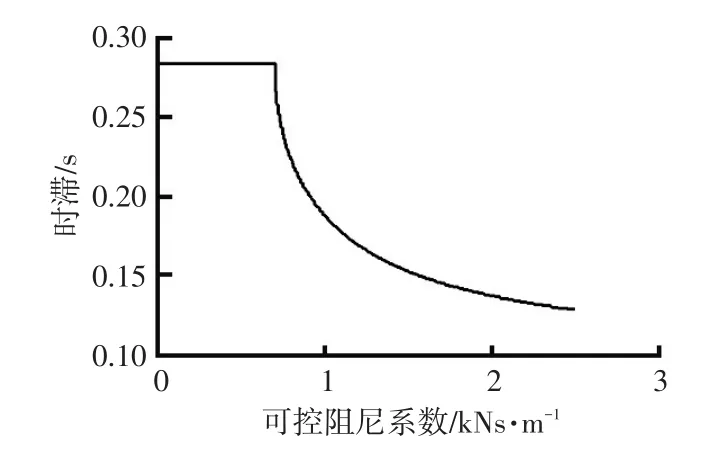
圖3 可控阻尼cr與臨界時滯τ的關系
該液壓系統在實際工作過程中,cs與cr的不同組合將會引起EHA半主動懸架系統時滯穩定區域的變化,如圖4所示。由圖4可以看出,當cs/cr>1時,系統將進入全時滯穩定狀態。
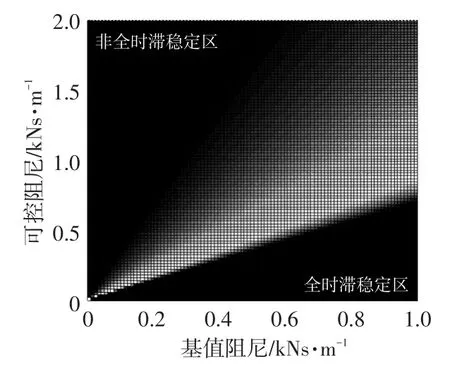
圖4 (cs,cr)平面內全時滯穩定區域
3 EHA半主動懸架模糊時滯補償控制
3.1 改進型Smith預估補償器
Smith預估補償器結構簡單,易于實現,是控制領域內比較常用的時滯控制方法之一,但由于其對于模型的誤差十分敏感,魯棒性較差,抗干擾能力不足,制約了其在非線性時變時滯系統領域的應用[10~11]。
本研究在Smith預估補償器的基礎上進行改進,引入了含有一階慣性濾波的動態反饋環節M(s),其時滯補償原理如圖5所示。其中Gc(s)為控制器傳遞函數,e-τps為預估滯后環節,e-τ′ps為被控對象實際滯后環節。
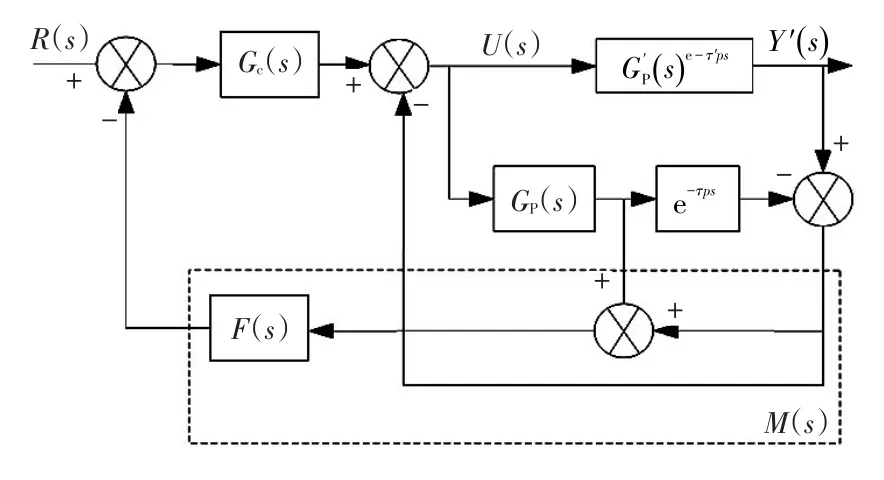
圖5 改進型Smith預估補償原理
當時滯補償模型G′p(s)e-τ′ps出現誤差時,為了避免模型誤差對系統的影響,對時滯補償環節的模型偏差進行補償后,經過一階慣性濾波環節F(s)濾波后,反饋給控制器,進而減小模型誤差對系統的影響,提高了系統時滯補償效果。
3.2 EHA半主懸架模糊控制器
模糊控制器在工業領域中應用較為廣泛,圖6所示為模糊控制器結構[12]。
按照EHA半主動懸架的工作原理,選擇簧載質量加速度E及其偏差Ec作為控制系統的輸入量。選擇7個模糊子集對輸入和輸出量的狀態進行表征,即正大(PB)、正中(PM)、正小(PS)、零(ZE)、負小(NS)、負中(NM)和負大(NB),設輸入量E和Ec的基本論域都為[-6,6],輸出量u的基本論域為[-7,7]。通過MATLAB軟件得到輸入量E和Ec以及輸出量u之間的規則曲線如圖7所示。
3.3 EHA半主動懸架模糊時滯補償控制系統
該系統采用改進型Smith時滯預估補償器改善EHA半主動懸架的動態特性,采用模糊控制方案提高系統的適應性。EHA半主動懸架系統中的時滯環節較多,例如電機響應時滯、液壓油路響應時滯等,因而將改進型Smith預估補償原理和模糊控制器相結合,得到如圖8所示的模糊時滯補償控制器結構。
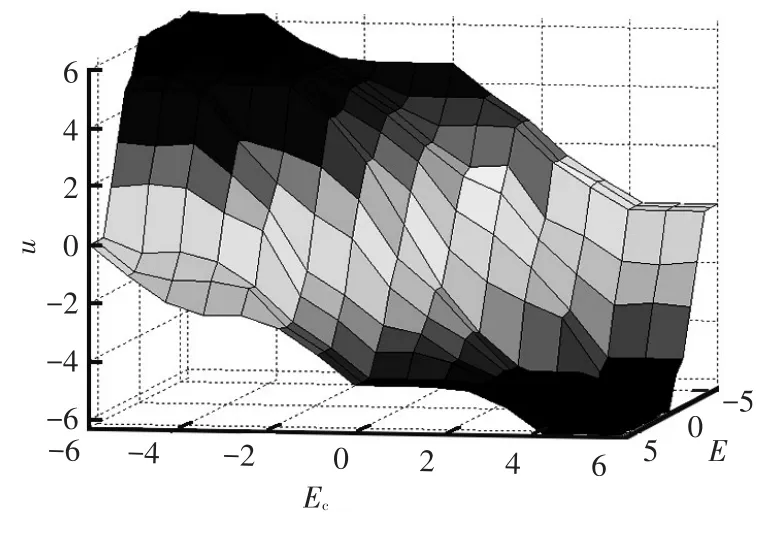
圖7 模糊推理系統的輸入輸出曲面
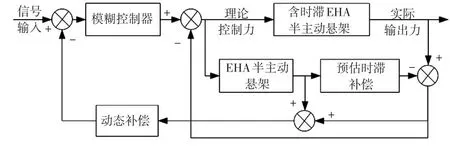
圖8 模糊時滯補償控制器結構
在MATLAB中建立EHA半主動懸架模糊時滯補償仿真模型。 EHA半主動懸架參數為:kt=150 kN/m,ks=15.734 kN/m,mu=40 kg,ms=250 kg,cs=1 kN·s/m,cr=0~2.5 kN·s/m。EHA作動器的參數為:電機電磁轉矩系數K=69 kN·m/A,液壓馬達排量q=63 mm3/rad,電機電樞電感L=60.5 μH,電機繞組電阻R=0.5 Ω,外界負載電阻Ra=0.1 Ω,液壓缸活塞有效面積A=7.657 6×10-4m2。
4 時滯補償EHA半主動懸架仿真分析
4.1 時滯對EHA半主動懸架的影響
4.1.1 時域內的影響
為了分析時滯對EHA半主動懸架減振效果的影響,建立不含時滯補償的模糊控制EHA半主動懸架仿真模型,仿真結果如圖9所示。
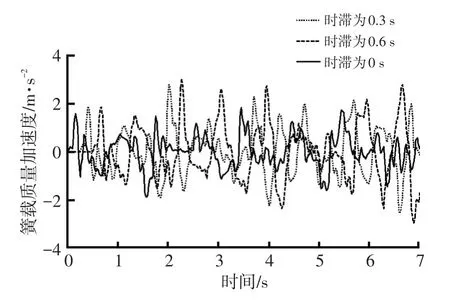
圖9 不同時滯的簧載質量加速度
從圖9中可以看出,當模糊控制EHA半主動懸架的時滯增大時,其減振效果逐漸降低,且當時滯增大到一定程度時,其減振效果甚至不如被動懸架,時滯繼續增大,懸架系統甚至出現失穩現象。因此時滯對模糊控制EHA半主動懸架的減振效果有很大的影響。
4.1.2 頻域內的影響
按照頻率響應函數的求解過程,對EHA半主動懸架車輛二自由度模型幅頻特性進行求解,首先對含時滯的EHA半主動懸架動力學方程進行傅里葉變換:

由式(6)得到路面激勵對簧載質量位移的幅頻特性:

根據式(7)利用MATLAB/Simulink進行仿真,最終得到不同時滯對EHA半主動懸架二自由度模型幅頻特性的影響曲線,如圖10所示。
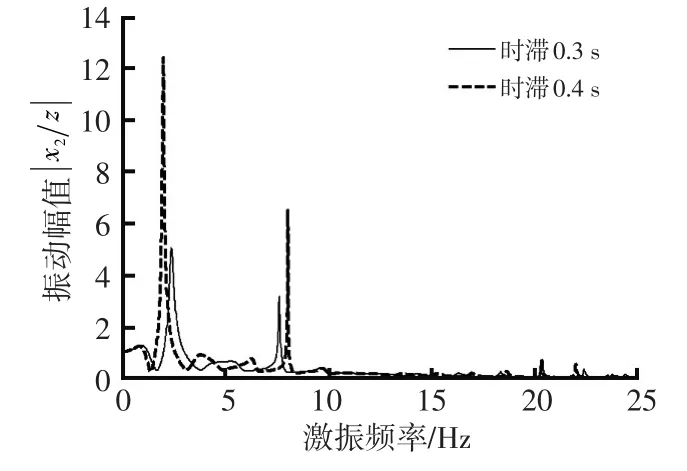
圖10 時滯對EHA半主動懸架幅頻特性的影響
由圖10可知,EHA半主動懸架系統時滯的增大,會引起系統低階主振型振幅的增大,也會引起一階、二階主振型共振頻率的相互逼近。當半主動懸架系統的時滯增大到一定限度時,系統的幅頻特性曲線將出現多個振峰,說明理論控制力與實際控制力不同步,系統出現了汽車的“輪跳”現象。因此,時滯不僅會影響EHA半主動懸架的控制效果,甚至會因為“輪跳”現象而導致系統失穩從而影響汽車行駛安全性。
4.2 EHA模糊時滯補償效果分析
根據改進型Smith預估補償控制器的設計方法,以及EHA半主動懸架模糊時滯補償仿真模型,在MATLAB中建立含有改進型Smith時滯預估補償器的模糊控制EHA半主動懸架系統仿真模型,同時建立C級白噪聲路面模型,設置模型車速為40 km/h,時滯分別為0.3 s和0.6 s,選擇平順性評價指標為簧載質量加速度和輪胎動載荷,對有時滯補償和無時滯補償的模糊控制EHA半主動懸架的減振效果進行仿真對比,仿真結果如圖11、圖12及表1所示。
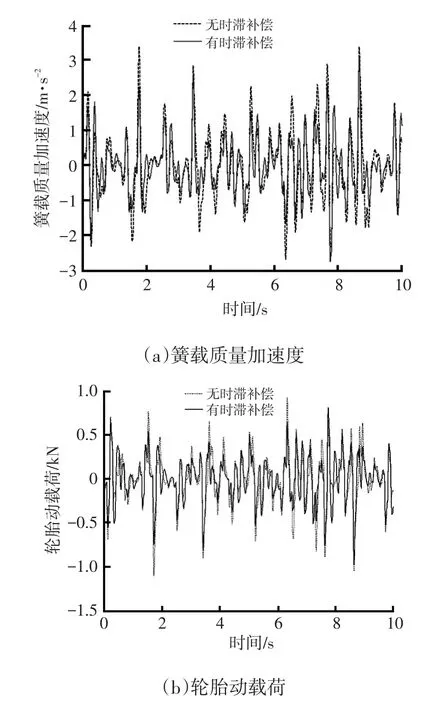
圖11 時滯為0.3 s時的仿真結果
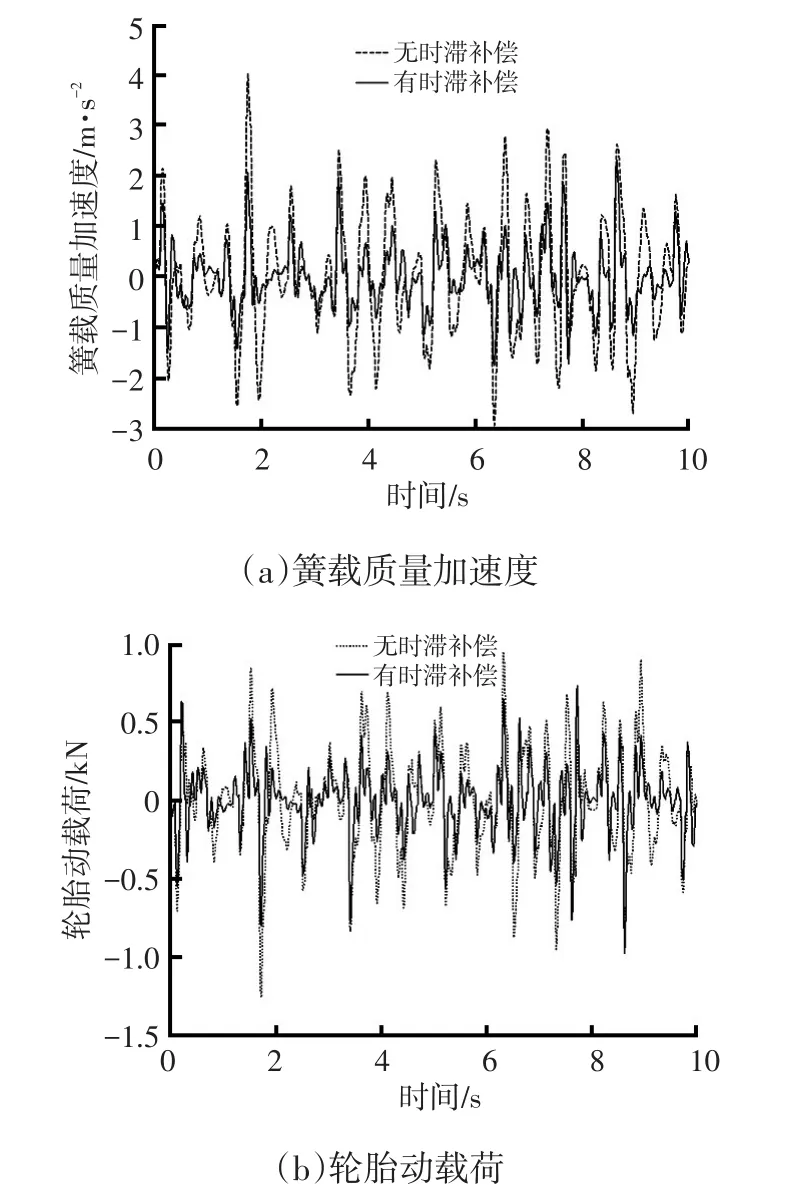
圖12 時滯為0.6 s時的仿真結果
結合圖11、圖12和表1可以看出:時滯能降低EHA半主動懸架減振性能,且時滯越大,對該半主動懸架性能的影響越大;含時滯補償的EHA半主動懸架的減振效果優于無時滯補償的EHA半主動懸架;時滯越大,改進型Smith預估補償器對EHA半主動懸架的時滯補償,可以越明顯地降低時滯對EHA半主動懸架減振性能和系統穩定性的影響。
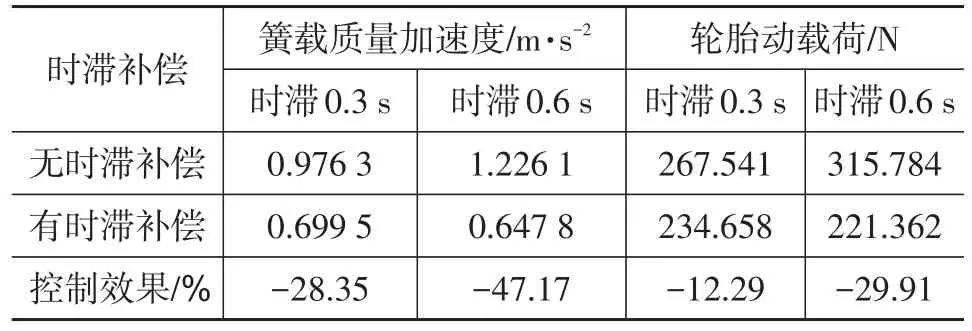
表1 含時滯補償和無時滯補償的模糊控制半主動懸架對比
4.3 EHA模糊時滯補償策略抗干擾能力分析
懸架系統的干擾一般是由汽車系統質量、懸架系統結構參數、控制系統采樣誤差等因素引起的,這些干擾一般具有隨機性和突變性。本文選擇隨機振蕩作為該系統的仿真干擾源,將其施加到時滯補償環節中。設隨機干擾±5時為弱干擾,隨機干擾±10時為強干擾,如圖13所示。
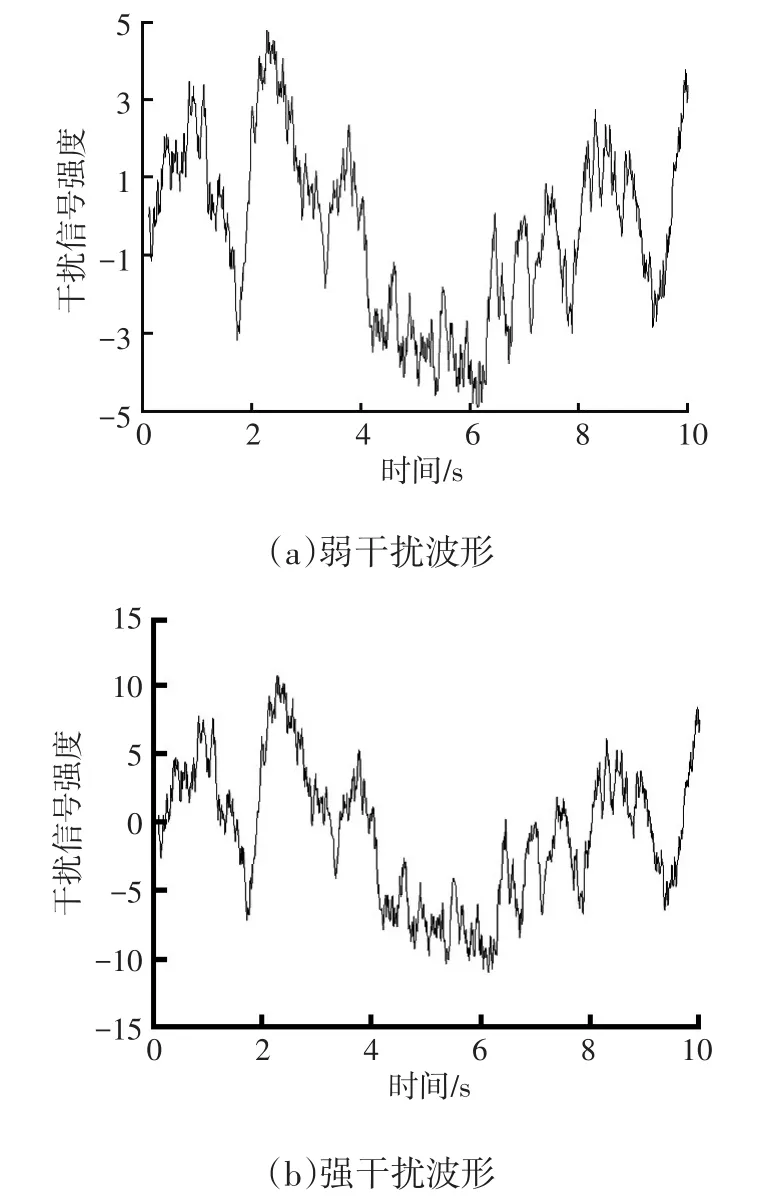
圖13 施加于懸架系統的干擾波形
為了分析改進型Smith預估補償器時滯補償效果,分別建立Smith和改進型Smith模糊時滯補償EHA半主動懸架仿真模型,并在模型補償環節引入強、弱干擾進行仿真,結果如圖14所示。
從圖14可以看出,當補償環節的懸架模型誤差對系統造成干擾時,Smith預估補償器的時滯補償能力明顯不如改進型Smith預估補償器,同時,隨著時滯補償環節模型誤差對系統干擾增大,Smith預估補償器的時滯補償能力急劇下降,甚至出現系統失穩現象,而改進型Smith預估補償器通過動態反饋對模型參數誤差進行自我修正,提高了時滯補償能力和抗干擾能力。
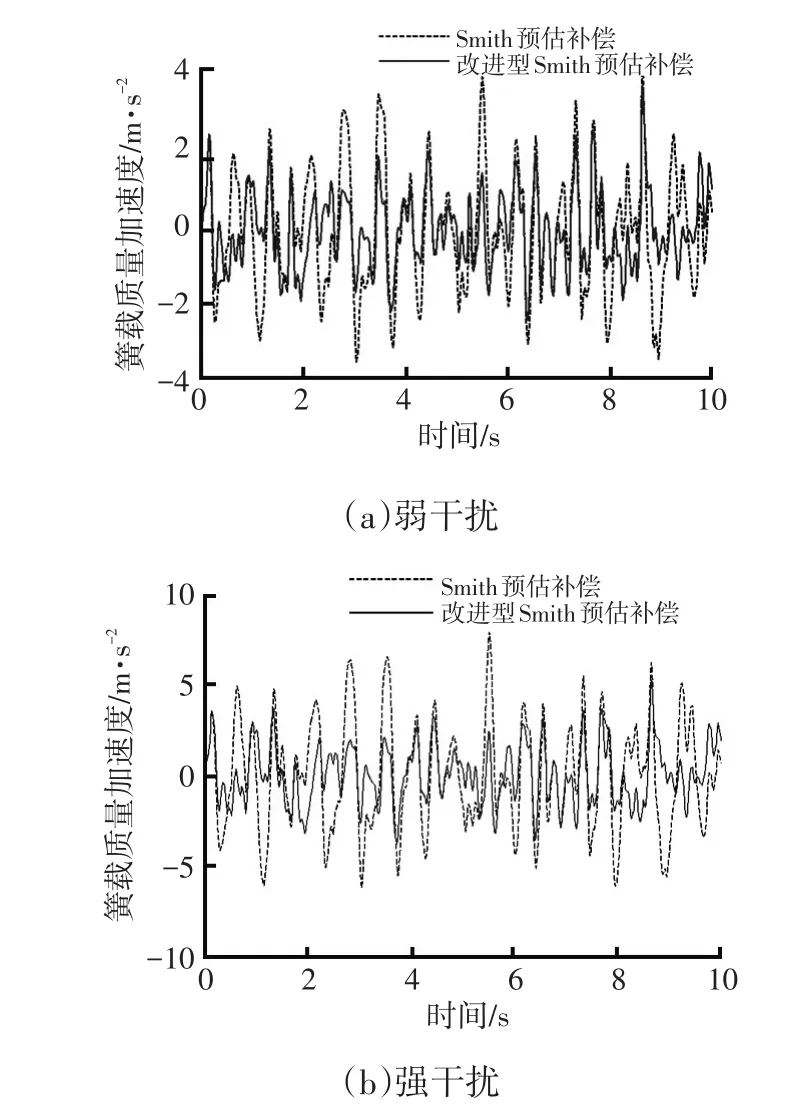
圖14 干擾條件下時滯預估補償器效果
5 EHA半主動懸架時滯補償效果試驗驗證
5.1 試驗方案
利用EHA半主動懸架振動試驗系統,對改進型Smith預估補償器的時滯補償效果進行試驗研究。EHA臺架試驗系統如圖15所示。該系統主要由電磁振動臺、上、下橫梁、螺旋彈簧、導向機構、滑塊導軌支撐機構、DSP控制器、數據采集與處理系統等組成。其中,在上橫梁加載配重塊模擬簧載質量,EHA作動器、液壓缸、下橫梁模擬非簧載質量,并在上橫梁處安裝加速度傳感器用以測量簧載質量加速度。試驗中采用東華測試公司生產的DH186型加速度傳感器對簧載質量加速度進行采集。

圖15 EHA臺架試驗系統
為了進一步驗證EHA半主動懸架時滯補償控制效果,試驗分為兩組進行:含改進型Smith預估補償器和不含改進型Smith預估補償器。
5.2 試驗結果分析
對含改進型Smith預估補償器和不含改進型Smith預估補償器的EHA半主動懸架的簧載質量加速度進行對比。輸入頻率、振幅不同的正弦激振力的試驗結果如圖16所示。
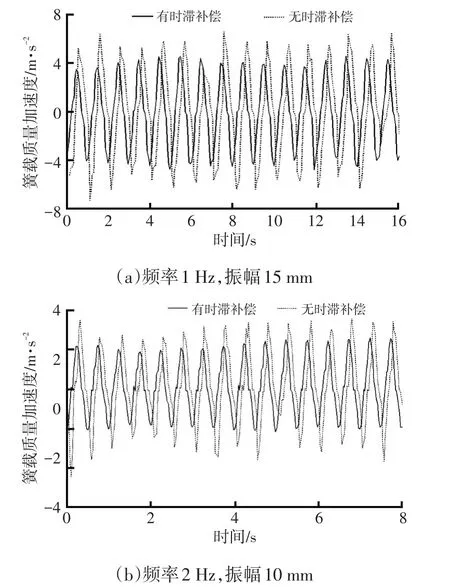
圖16 不同頻率、振幅的正弦力輸入下時滯補償試驗結果
從圖16可以看出,在不同振幅和頻率的正弦激勵輸入下,含時滯補償器的EHA半主動懸架的簧載質量加速度較不含時滯補償器的EHA半主動懸架簧載質量加速度小,說明改進型Smith預估補償器能夠明顯降低時滯對于半主動懸架的影響,同時驗證了所建立的含改進型Smith預估補償器的EHA半主動懸架模型的正確性。
6 結束語
針對時滯對EHA半主動懸架系統的影響,提出了一種改進型Smith時滯預估補償器,將其用于模糊控制EHA半主動懸架進行時滯補償,并進行了仿真與臺架試驗,結果表明,改進型Smith時滯預估補償器能夠對系統模型誤差參數進行自我修正,從而提高系統的抗干擾能力,降低時滯對于半主動懸架的影響,提高了EHA半主動懸架的動態性能。
1 宋作軍.汽車半主動懸架的非線性動力學分析.中國機械工程,2016,27(20):2835~2839.
2 Snamina J,Orkisz P.A Comparison of Active and Semi-Active Sliding Mode Controllers Applied in Vibration Reduction Systems.Solid State Phenomena,2016,248:93~102.
3 李罡,張晗,王彧,等.基于電磁閥式阻尼連續可調減振器的半主動懸架試驗研究.汽車技術,2016,47(9):35~38.
4 Chen M Z Q,Hu Y,Li C,et al.Semi-active suspension with semi-active inerter and semi-active damper.IFAC Proceed?ings Volumes,2014,47(3):11225~11230.
5 寇發榮,范養強,張傳偉,等.車輛電動靜液壓作動器的半主動懸架時滯補償控制.中國機械工程,2016,27(15):2111~2117.
6 祖廣浩.磁流變半主動懸架的史密斯預估器—泰勒級數擴展LQG時滯補償控制:[學位論文].鎮江:江蘇大學,2016.
7 宋剛,許長城.考慮控制時滯的車輛主動懸架隨機預瞄控制.農業機械學報,2013,44(6):1~7.
8 寇發榮,杜嘉峰,張傳偉,等.電液自供能式車輛主動懸架多模式切換控制.機械科學與技術,2016,35(12):1937~1943.
9 申永軍,祁玉玲,楊紹普,等.含時滯的單自由度半主動懸架系統的動力學分析.振動與沖擊,2012,31(24):38~40.
10 劉長良,馬增輝.Smith預估模型參數仿真分析及多目標優化.系統仿真學報,2014,26(8):1706~1712.
11 齊朝陽,鄭恩讓,侯再恩.模糊相軌跡模型Smith預估控制.系統科學與數學,2016,36(4):476~486.
12 陶業英,高嵩.汽車主動懸架模糊控制方法研究.汽車技術,2013,44(11):29~32.
(責任編輯 斛 畔)
修改稿收到日期為2017年6月30日。
Research on Time Delay Compensation Control of Semi-Active Suspension with EHA
Kou Farong,Wang Zhe,Fan Yangqiang,Du Jiafeng,Li Dong
(Xi′an University of Science and Technology,Xi′an 710054)
In order to improve vehicle ride comfort,the structure of vehicle semi-active suspension with EHA(Electro-Hydrostatic Actuator)was designed.The critical time delay of EHA semi-active suspension system was calculated,and the influence of time delay on EHA semi-active suspension was analyzed.In this paper,an improved Smith time delay predictive compensator was proposed,which was used to compensate the time delay of EHA semi-active suspension with fuzzy control,and simulation analysis and experimental verification were done.The results show that the improved Smith predictive compensator can correct the error of the suspension model parameters in compensation,improve the antiinterference ability of suspension system,and reduce the impact of the time delay on semi-active suspension,thereby improve the dynamic performance of EHA semi-active suspension.
EHA,Semi-active suspension,Improved Smith predictor compensator,Antiinterference,Timedelay compensation
EHA 半主動懸架 改進型Smith預估補償器 抗干擾 時滯補償
U463.33 文獻標識碼:A 文章編號:1000-3703(2017)10-0034-06
國家自然科學基金面上項目(51775426);陜西省教育廳服務地方專項計劃項目(17JF017);國家自然科學基金項目(51275403)。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19
