基于獨立脈沖轉向系統車輛穩定性控制
2017-11-20 08:14:57張寶珍謝暉黃晶阿米爾
湖南大學學報·自然科學版 2017年10期
張寶珍+謝暉+黃晶+阿米爾


摘 要:為了提高車輛操縱穩定性,本文集成獨立轉向和主動脈沖轉向提出了一種主動后輪獨立脈沖轉向(ARIPS)控制策略,并對此進行理論分析和試驗研究.通過建立ARIPS系統仿真動力學模型,研究此系統的運行對懸架性能的影響并分析不同轉向脈沖控制參數對車輛穩定性的影響.依據仿真分析和頻率分析方法確定最優脈沖參數.設計ARIPS控制器及脈沖轉角分配模塊,基于CarSim 和Simulink進行聯合仿真分析,驗證ARIPS的控制性能. 研制并安裝主動脈沖轉向系統,基于試驗Lexus車輛進行整車試驗研究,驗證ARIPS系統的實用性.仿真和試驗結果表明:驗證了ARIPS系統的可行性和經濟性,ARIPS控制能有效提高車輛的操縱穩定性,比主動后輪轉向(ARS)和主動后輪脈沖轉向(ARPS)具有更好的控制效果,對改進四輪轉向(4WS)系統的性能提供了一個新的研究方向和試驗基礎.
關鍵詞:車輛動力學;四輪轉向;獨立轉向;脈沖控制;穩定性;整車試驗
中圖分類號:U467.1 文獻標志碼:A
Research on Vehicle Stability Control Based on IndependentPulsed Steering
ZHANG Baozhen 1, XIE Hui1, HUNAG Jing 1, AMIR K1,2
(1. State Key Laboratory of Advanced Design and Manufacturing for Vehicle Body, Hunan University, Changsha 410082,
China;2. Department of Mechanical Engineering,University of Waterloo, Waterloo, N2L 3G1, Canada)
Abstract:In order to improve the vehicle handling stability, an active rear independent pulse steering system(ARIPS)which integrates independent steering and active pulse steering was proposed, and theoretical analysis and experiment study were carried out. The simulation dynamics model equipped with ARIPS system was established to analyze the effects of installation and operation of pulse actuator on the suspension performance. The optimal pulse parameters were determined according to the simulation analysis and frequency analysis method. A control structure and algorithm were designed and a full vehicle model equipped with the steering actuator was built in Carsim and co-simulated with Simulink to verify the proposed system. A hydraulic steering system was designed and assembled for a Lexus to carry out road experiments to assess the applicability of the ARIPS system. Simulation and test results obtained have shown that the proposed system has better performance in terms of improving vehicle handling stability compared with ARS and ARPS system. Meanwhile, the proposed system is economical and feasible,providing a new research space and experimental basis to improve the performance of 4WS system.
Key words:vehicle dynamics; 4WS; independent steering; pulsed control; stability; vehicle experiment
隨著車輛數量的逐年增加和行駛車速的不斷提高,車輛交通事故在過去20年已成為一個嚴重的安全問題[1].通過底盤控制技術來提高車輛操縱穩定性和安全性一直是國內外學者的研究重點[2-4].直接橫擺力矩控制(DYC)利用分配不均勻的車輪縱向力產生額外橫擺力矩來控制車輛穩定性[5],但DYC在車輪兩側路面附著系數不同的情況下,效果受到了很大的限制[6].主動轉向技術是一種有效的車輛橫擺運動和側向運動的主動控制方法[7],但是控制轉角受到車輪非線性特性和載荷轉移的影響[8].鑒于此,新型主動前輪獨立轉向系統(AIFS)被提出,AIFS系統使垂向載荷大的外側車輪轉動更大的角度,充分利用車輪的側向力,從而更好地控制車輛的操縱穩定性與安全性能,取得了很好的效果[9-11].在國外一種新穎的主動脈沖轉向控制技術,逐漸受到人們的關注,文獻[12-14]深入研究了主動脈沖轉向(APS)技術對車輛穩定性的影響,驗證了APS的實用性.但對這些技術的應用都注重在對車輛前輪的研究,并沒有分析作用于后輪的控制效果.endprint
本文基于主動獨立轉向和脈沖轉向,提出新穎的ARIPS系統來提高車輛的穩定性,以試驗Lexus車輛為研究對象分析ARIPS系統的運行對懸架系統性能的影響并研究脈沖參數對車輛穩定性能的影響;設計ARIPS控制器及脈沖轉角分配模塊,運用CarSim和Simulink進行聯合仿真,驗證所提出的ARIPS系統的有效性與優越性;基于Lexus試驗車進行試驗研究,驗證ARIPS系統的實用性.
1 ARIPS系統工作原理
1.1 傳統主動轉向系統的缺陷
基于魔術輪胎公式,車輪側向力與側偏角在不同車輪垂向載荷作用下的關系曲線,如圖1所示.車輪側向力隨著垂向載荷增加而增大,且側向力線性飽和點的值也隨之增大并存在非線性特性[15-16].車輛轉向時由于慣性和車身側傾的影響,內側車輪垂直載荷會向外側車輪轉移,傳統主動轉向系統,內外車輪轉向角相同,則內側車輪側向力很容易達到飽和,但外側車輪側向力還有很大上升空間,沒有充分利用外側車輪側向力,降低了車輛高速行駛時極限轉彎能力.ARIPS系統則考慮了內外車輪側向力飽和區域的差異特性,通過適當增加外側車輪轉角,充分利用車輪所能產生的側向力,改善傳統主動轉向系統在轉向工況下側向力不足的缺陷.
1.2 ARIPS系統的結構和實現原理
ARIPS系統左右兩側車輪通過一套齒輪齒條、行星齒輪與轉向機構相互連接,如圖2所示.太陽輪軸與2個太陽輪固接,齒輪齒條機構的小齒輪與行星輪轉向架固接,兩個助力伺服電機分別驅動兩行星輪機構的外齒圈,當電機轉速與轉向不同時,可以得到不同的轉向脈沖信號,從而實現左右兩輪的獨立轉向.
2 車輛模型
2.1 車輛動力學模型
基于Lexus車輛建立車輛模型,車輛受力及結構參數如圖3所示,各自由度微分方程如下[12].
式中:V,r和β分別為車速,橫擺角速度和質心側偏角;a和b分別為質心到前、后軸的距離;Ixx和Izz分別為車輛橫擺轉動慣量和側傾轉動慣量;K和C為車輛總側傾剛度和側傾阻尼;為車輛側偏角;B為車輛輪距;h為懸掛質量中心到側傾軸距離.
2.2 ARIPS系統多體動力學模型
為了分析ARIPS系統的運行對懸架性能的影響,建立了基于試驗Lexus車輛的帶有ARIPS轉向裝置的多連桿后懸架ADAMS模型,如圖4所示.
2.3 ARIPS系統的運行對懸架參數的影響
基于2.2節的ADAMS懸架模型分析ARIPS系統的安裝與運行對懸架參數的影響,輸入不同的轉向位移參數進行仿真分析,記錄轉向位移的變化對懸架參數的影響,如下表1所示.
如表1所示,側傾中心的高度和懸架主要參數受轉向位移變化的影響非常小.本文中不考慮其影響,即獨立脈沖轉向裝置的運行對車輛的懸架系統的功能沒有明顯的影響.由此,可以通過控制電機的轉速和方向來實現主動后輪獨立脈沖轉角的預想,同時不影響懸架系統的正常使用功能.
3 ARIPS控制系統
3.1 ARIPS轉向理念
ARIPS系統綜合內外側車輪側向力非線性特性和垂直載荷轉移的影響,通過激活不同幅值的脈沖轉向信號來提高車輛的穩定性能,最大程度地利用車輪側向力,如圖5所示.類似于ABS制動力控制的工作原理,主動轉向角通過脈沖信號來控制.為分析不同脈沖信號參數對車輛動力學的影響,每個脈沖參數被獨立地進行研究.
3.2 脈沖參數的分析與優化
脈沖轉角包括三個基本的參數:脈沖形式,頻率和幅值,本節分析不同脈沖參數對車輛穩定性能的影響,并確定最優脈沖參數值.
3.2.1 脈沖形式的選擇
在選擇脈沖轉向信號過程中,脈沖信號參數必須在仿真和試驗過程中是容易調節和控制的,本文中脈沖信號選用標準正弦脈沖信號,其頻率和幅值可以方便地通過驅動控制電機的轉向和轉速來實現,其脈沖方程表達式如下:
δr(t)=A2(1-cos(2πft))(5)
式中:f為脈沖頻率;A為脈沖幅值.圖6所示的樣本脈沖信號,其幅值為2°,頻率為3 Hz.
為驗證脈沖頻率對車輛動力學性能的影響,固定正弦脈沖幅值為A=2°,每次仿真的脈沖頻率分別設定為f=1 Hz, 2 Hz, 3 Hz, 4 Hz 和5 Hz.仿真過程中車身側傾角和質心側偏角如圖8所示.
仿真結果表明,脈沖頻率對車輛的側傾角和質心側偏角有很大的影響.脈沖頻率為1 Hz時,側傾角的值比不加控制的值更大,表明車輛的側傾穩定性變壞.通過仔細觀察,質心側偏角和側傾角在脈沖頻率為4 Hz仿真過程中具有最小值,表明4 Hz的脈沖信號能更好地控制車輛的穩定性能,同時4 Hz非常接近圖7中的wn值,進一步證明了設定脈沖頻率值為wn,能更好地控制車輛的穩定性能.
3.2.3 脈沖幅值分析與優化
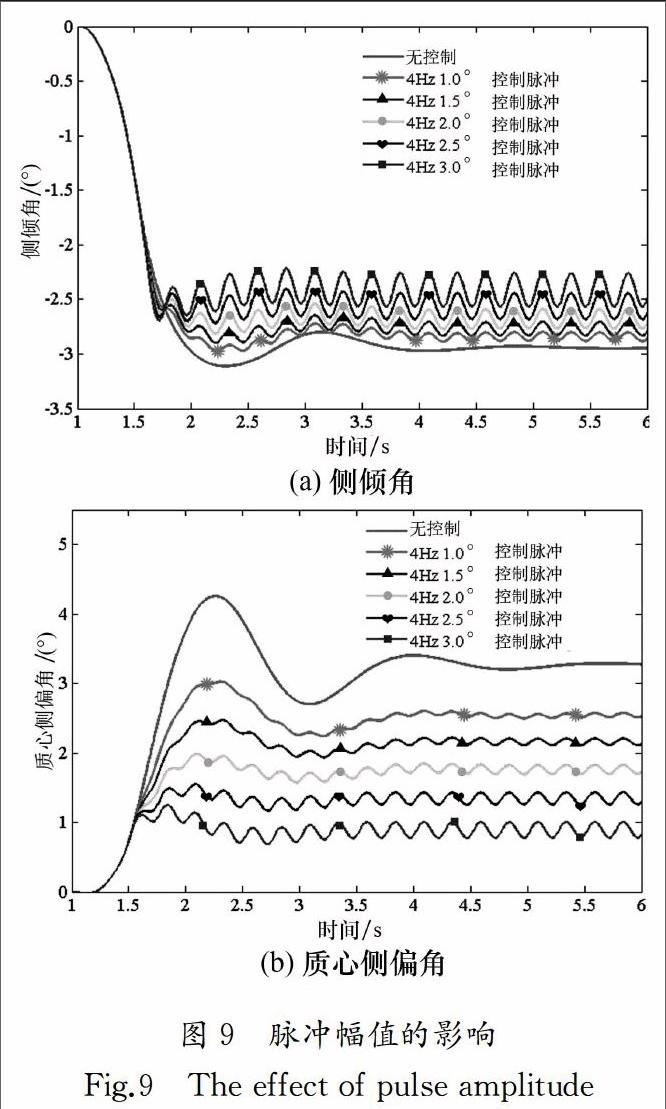
為分析脈沖幅值對車輛穩定性能的影響,選定正弦脈沖并固定脈沖頻率為4 Hz,每次仿真設定脈沖幅值分別為A= 1.0°, 1.5°, 2.0°, 2.5°和 3.0°.車輛車身側傾角和質心側偏角變化曲線如圖9所示.
仿真結果表明,增加脈沖幅值,能減少質心側偏角和車身側傾角,提高車輛的穩定性能,但是增加脈沖幅值將會需要更大的轉向力和轉向力矩,需要更大功率的控制電動機.考慮能耗、安裝空間和輪胎非線性特征,本文中的脈沖幅值限定為3°.
3.3 ARIPS控制系統的結構
ARIPS控制系統的目標是提高整車穩定性,車輛橫擺角速度和質心側偏角是衡量車輛橫向穩定性能的兩個重要指標,側傾系數R是體現車輛側翻性能的指標[17].側傾系數可以通過車輛左右輪胎垂向載荷和力矩平衡來計算:
R=Fzr-FzlFzr+Fzlendprint
=2msmB(hR+hcos)+Vr-hg+hsin(8)
式中:Fzl和Fzr分別代表左右兩側車輪垂向載荷,hR代表側傾軸線到地面的距離.
本文設計了一個 ON/OFF控制器,通過側傾系數來控制系統的開啟或關閉,車輛的橫擺角速度和質心側偏角作為觀測變量.側傾系數R在車輛直線行駛時接近為0;當車輛在轉彎或變道的工況時,R在-1到1間變化.如果R接近-1或1,說明車輛某側輪胎即將或已經脫離地面,車輛將會發生側翻.考慮車身的慣性和控制器的延遲作用,本文設定R的安全閾值為[-0.8,0.8],如果R超過了安全閾值,控制器將激活脈沖裝置,如果R在安全閾值之內,脈沖控制器將不工作,控制器的工作流程如圖10所示.
通過1.1節中對車輪側向力的分析與3.2節中對脈沖參數的研究,內外側輪胎的主動脈沖控制信號可由如下公式表達:
δouter=δr+kδc
δinner=δr-kδc(9)
式中:δr為后輪控制脈沖信號;k為內外輪脈沖控制轉角轉移比例系數;δouter和δinner分別為內外側車輪脈沖控制轉角.
4 仿真驗證與結果分析
基于CarSim車輛模型仿真分析,來研究ARIPS 系統的有效性與潛在能力,控制單元通過Simulink建立,圖11為聯合仿真控制系統框圖.CarSim車輛模型是參照試驗Lexus車輛內部參數建立的,基本參數如表2所示.
為驗證ARIPS系統的實用性與優越性, 主動脈沖轉向(ARPS)系統(k=0) 和傳統后輪轉向(ARS)系統被用來對比分析.具有ARIPS系統, ARPS系統和ARS系統的車輛分別進行仿真和對比分析.
4.1 階躍轉向工況仿真
車速為100 km/h,車輪轉角從0°快速變化到某個設定值δf=3.5 °,路面附著系數μ為0.8.仿真結果如圖12所示.
從圖12可以看出,三種控制策略都降低了車輛的側傾系數和車身側傾角,能有效地把車輛的側翻風險限制在安全閾值范圍之內,其中車輛側傾角降低率約為23.8%.圖(e)顯示車輛具有明顯的過度轉向狀態,ARIPS控制時橫擺角速度和質心側偏角降低18.2%和2.2°,這能使車輛以最小的軌跡偏差接近于理想路徑.然而,三種控制策略表現出來的性能是不一樣的,ARIPS 系統能有效增強ARPS系統的性能,這是因為車輛轉向過程中,由于載荷從內輪轉向外輪,導致了內側車輪產生的側向力減少,外側車輪側向力相應的增加.仿真結果表明:ARIPS系統和ARPS系統比ARS系統表現出了更好的控制性能.
4.2 雙移線工況仿真
雙移線工況能準確描述車輛遇到障礙物或超車時緊急避讓過程中車輛的性能.車速90 km/h,路面附著系數μ為0.8,仿真結果如圖13所示.
從圖13可知,車輛的側傾系數和車身側傾角在三種控制系統的情況下得到明顯降低,車輛的側翻風險能控制在設定的閾值范圍之內;同時車輛的橫擺角速度和質心側偏角都能朝理想值靠近,提高了車輛的橫擺穩定性能.ARIPS系統比ARPS系統和ARS系統展現出了更好的控制性能,特別是在轉向時刻,ARIPS 系統能更好地適用車輛轉彎或超車等極限工況.
5 試驗驗證與結果分析
本節設計并安裝獨立脈沖發生器,運用Lexus車輛進行道路試驗,進一步驗證ARIPS系統在實際工況中的應用性能.液壓轉向系統的設計和安裝如圖14所示.采用基于天線的GPS-IMU測量系統對汽車的狀態與路面參數進行測量,同時利用傳感器與PC機進行數據傳遞與記錄,得到不同工況下的參數指標,如圖15所示.
階躍轉向試驗工況:車速45 km/h,方向盤轉角為180°,持續時間為0.5 s,第4 s到達指定速度,此工況下分別測試ARIPS系統在開啟和關閉狀態下車輛的橫擺角速度和側向加速度,如圖16所示.
試驗結果表明:在ARIPS系統開啟情況下,車輛橫擺和側向角速度分別降低12.6%和23.1%,同時此車表現出了一定的過度轉向的內部特性,橫擺角速度的降低能讓其更接近理想橫擺角速度,提高了車輛的橫擺性能和路徑跟隨性能;側向加速度的降低提高了車輛的側向穩定性能.總體來說,ARIPS系統能有效改善車輛的操縱穩定性能.
6 結 論
本文提出了一種主動后輪獨立脈沖轉向控制方法,并對此做了理論和試驗研究.
1) 提出ARIPS系統的概念,并分析了ARIPS運行不會影響懸架正常使用性能.
2) 基于試驗Lexus車輛,建立車輛的數學模型,分析不同脈沖信息(頻率和振幅)對車輛穩定性的影響并確定了最優的脈沖參數.
3)設計脈沖獨立轉向控制器,運用CarSim 和Simulink進行聯合仿真分析,驗證了所提ARIPS系統相比于ARPS系統和ARS系統的有效性與優越性,為車輛主動轉向控制提供了一種新的研究方向.
4) 以Lexus試驗車為研究對象,安裝脈沖轉向裝置和傳感器,進行道路試驗,驗證了ARIPS系統的可行性和實用性,為ARIPS系統研究提供了試驗基礎.
參考文獻
[1] BASLAMISLI S C, KOSE I E, ANLAS G. Handling stability improving through robust active front steering and active differential control[J]. Vehicle System Dynamics, 2011, 49(5):657-683.
[2] LACROIX B, LIU Z, SEERS P. A comparison of two control methods for vehicle stability control by direct yaw moment [J]. Applied Mechanics and Materials, 2012,120:203-217.endprint
[3] 李偉平,柳超,竇憲東,等. 油氣懸架的不確定性多目標優化[J].湖南大學學報:自然科學版, 2014, 41(10):27-34.
LI Weiping, LIU Chao, DOU Xiandong, et al. Multi-objective optimization based on uncertainty in hydro-pneumatic suspension[J]. Journal of Hunan University: Natural Sciences, 2014, 41(10):27-34. (In Chinese)
[4] 宋曉琳,熊琦瑋,曹昊天.基于軌跡預測的車輛協同碰撞預警仿真研究[J].湖南大學學報:自然科學版, 2016, 43 (10):1-7.
SONG Xiaolin, XIONG Qiwei, CAO Haotian. Research and simulation on cooperative collision warning based on trajectory prediction[J]. Journal of Hunan University: Natural Sciences, 2016, 43 (10):1-7. (In Chinese)
[5] RUBIN D, AROGETI S A. Vehicle yaw stability control using active limited-slip differential via model predictive control methods [J]. Vehicle System Dynamics, 2015,53(9):1315-1330.
[6] 楊易,秦小飛,徐永康,等. 基于AFS與DYC的車輛側風穩定性控制研究[J].湖南大學學報:自然科學版, 2014, 41 (5):14-19.
YANG Yi, QIN Xiaofei, XU Yongkang, et al. Study of vehicle crosswind stability control based on AFS and DYC[J]. Journal of Hunan University: Natural Sciences, 2014, 41 (5):14-19. (In Chinese)
[7] KAPANIA N R, GERDES J C. Design of a feedback-feedforward steering controller for accurate path tracking and stability at the limits of handling [J]. Vehicle System Dynamics,2015,53(12):1687-1704.
[8] 陳新, 張桂香. 基于SDRE方法的汽車線控轉向系統控制方法研究[J]. 中國機械工程, 2012, 23(12):1496-1501.
CHEN Xin, ZHANG Guixiang. Research on SWB systems control method based on SDRE technique[J].China Mechanical Engineering, 2012, 23(12):1496-1501.(In Chinese)
[9] FARAZANDEH A, AHMED A, RAKHEJA S. Performance enhancement of road vehicles using active independent front steering (AIFS) [J]. SAE International Journal of Passenger Cars- Mechanic System , 2012 , 5 (4) :1273-1284
[10]FARAZANDEH A, AHMED A, RAKHEJA S. Performance analysis of active independent front steering (AIFS) for commercial vehicles with greater lateral load shift propensity[J]. SAE International Journal of Commercial Vehicles, 2013, 6(2):288-300.
[11]袁希文, 文桂林, 周兵. 基于控制分配的主動前輪獨立轉向車輛轉角分配算法[J]. 中國機械工程, 2015, 26(9):1243-1250.
YUAN Xiwen, WEN Guilin, ZHOU Bing. Road wheel angle distribution algorithm for road vehicles with AIFS based on control allocation[J].China Mechanical Engineering, 2015, 26(9):1243-1250. (In Chinese)
[12]RAHMAN A A. Pulsed active steering HIL experiment [D]. Waterloo:University of Waterloo, 2009.
[13]ZHANG Y, KHAJEPOUR A, XIE X. Rollover prevention for sport utility vehicles using a pulsed active rear-steering strategy[J].Journal of Automobile Engineering, 2015, 230(9):1-13.endprint
[14]張寶珍,阿米爾,謝暉,等.主動脈沖轉向的橫擺穩定性分析與實驗研究[J].湖南大學學報:自然科學版, 2016, 43 (10):32-41.
ZHANG Baozhen, AMIR K, XIE Hui, et al. Analysis and test of vehicle yaw stability control based on an active pulsed steering[J]. Journal of Hunan University: Natural Sciences, 2016, 43 (10):32-41. (In Chinese)
[15]夏光,唐希雯,陳無畏,等. 基于輪胎合力計算與分配的車輛橫向穩定性控制研究[J].汽車工程,2015,37(11):1298-1306.
XIA Guang, TANG Xiwen, CHEN Wuwei, et al. A research on the lateral stability control of vehicle based on the resultant force calculation and allocation of tire [J]. Automotive Engineering, 2015,37(11):1298-1306. (In Chinese)
[16]喻凡,林逸. 汽車系統動力學[M]. 北京:機械工業出版社,2012.
YU Fan, LIN Yi. Vehicle dynamics system[M]. Beijing: China Machine Press, 2012. (In Chinese)
[17]方敏,汪洪波,劉躍,等. 基于功能分配的汽車主動懸架控制的研究[J]. 汽車工程,2015,37(2):200-206.
FANG Min, WANG Hongbo, LIU Yue, et al. A study on the control of vehicle active suspension based on function allocation[J]. Automotive Engineering, 2015,37(2):200-206. (In Chinese)endprint