雙片集成數(shù)字硅陀螺接口ASIC的設(shè)計(jì)與測(cè)試
2017-11-08 01:56:42陳偉平閆菁敏劉曉為
哈爾濱工業(yè)大學(xué)學(xué)報(bào) 2017年10期
關(guān)鍵詞:信號(hào)設(shè)計(jì)
付 強(qiáng),陳偉平,閆菁敏,尹 亮,劉曉為
(1. 哈爾濱工業(yè)大學(xué) MEMS中心,哈爾濱150001; 2.微系統(tǒng)與微結(jié)構(gòu)教育部重點(diǎn)實(shí)驗(yàn)室(哈爾濱工業(yè)大學(xué)),哈爾濱150001)
雙片集成數(shù)字硅陀螺接口ASIC的設(shè)計(jì)與測(cè)試
付 強(qiáng)1,2,陳偉平1,2,閆菁敏1,尹 亮1,2,劉曉為1,2
(1. 哈爾濱工業(yè)大學(xué) MEMS中心,哈爾濱150001; 2.微系統(tǒng)與微結(jié)構(gòu)教育部重點(diǎn)實(shí)驗(yàn)室(哈爾濱工業(yè)大學(xué)),哈爾濱150001)
為實(shí)現(xiàn)MEMS陀螺高精度、數(shù)字化和小型化,適應(yīng)慣性導(dǎo)航和測(cè)量等領(lǐng)域的應(yīng)用要求,采用雙片集成方式,基于0.5 um的N阱CMOS工藝,設(shè)計(jì)并實(shí)現(xiàn)了一款實(shí)用化的MEMS陀螺接口電路.設(shè)計(jì)了基于高頻載波的閉環(huán)自激驅(qū)動(dòng)電路和低噪聲差分敏感檢測(cè)模擬前級(jí)電路,高頻信號(hào)將敏感信號(hào)調(diào)制到高頻后與閃爍噪聲相加,經(jīng)過(guò)開(kāi)關(guān)相敏解調(diào)以及低通濾波后得到低噪聲模擬角速度輸出,并由集成的高分辨率四階單環(huán)一位sigma delta ADC將模擬信號(hào)轉(zhuǎn)化成為數(shù)字信號(hào),實(shí)現(xiàn)數(shù)字化輸出的硅陀螺接口電路.測(cè)試結(jié)果表明:sigma delta 調(diào)制器的動(dòng)態(tài)范圍達(dá)到130 dB,陀螺整機(jī)量程為±200 °/s,帶寬為60 Hz,刻度因子為46.45 LSB/((°)s-1);線性度為342×10-6,輸出噪聲為0.004(°)s-1/Hz1/2,零偏穩(wěn)定性為3.4 °/h.通過(guò)電路集成實(shí)現(xiàn)了小型化、低成本和角速度數(shù)字化精確輸出,測(cè)試結(jié)果與其他相關(guān)研究對(duì)比表明該結(jié)構(gòu)可以得到很好的性能.
數(shù)字化系統(tǒng);硅陀螺;sigma delta ADC;ASIC;低噪聲
硅陀螺角速度傳感器作為一種MEMS(微機(jī)電系統(tǒng))傳感器在最近的幾年受到越來(lái)越多的關(guān)注.它不僅能夠應(yīng)用于慣性導(dǎo)航和航空航天,還能夠應(yīng)用于消費(fèi)產(chǎn)品中,例如數(shù)碼攝像機(jī)和手機(jī)等.為了滿足慣性導(dǎo)航的高精度的要求,對(duì)硅陀螺傳感器接口電路的性能提出了更高的要求[1-2].過(guò)去對(duì)接口電路的研究主要側(cè)重于模擬前置電路,國(guó)內(nèi)很少有單位開(kāi)展數(shù)字輸出陀螺工作,而且大部分是在PCB基礎(chǔ)上通過(guò)分立器件實(shí)現(xiàn),這不僅需要更大的體積,而且很難降低成本.本文提出了一種高集成度、高精度的數(shù)字化接口電路,這種接口電路可方便的應(yīng)用于角度信號(hào)的處理[3].
1 MEMS硅陀螺原理
圖1為微機(jī)械陀螺儀的機(jī)械結(jié)構(gòu),它包含了驅(qū)動(dòng)端和敏感端[4].陀螺具體的微機(jī)械工作原理詳見(jiàn)文獻(xiàn)[4].

圖1 微機(jī)械陀螺儀結(jié)構(gòu)
當(dāng)x方向的驅(qū)動(dòng)力為Fd=F0cos(ωdt)時(shí),驅(qū)動(dòng)方向上的速度vx(t)的穩(wěn)態(tài)解為
vx(t)=V0cos(ωdt),
式中V0為諧振速度幅值.
當(dāng)z方向有Ω大小的角速度輸入時(shí),在陀螺敏感的y方向?qū)a(chǎn)生大小為kΩV0cos(ωdt)的哥氏力,k為與結(jié)構(gòu)參數(shù)相關(guān)的常數(shù),哥氏力引起在檢測(cè)y
方向形成受迫振動(dòng),位移y的穩(wěn)態(tài)解為
y(t)≈ksΩcos(ωdt),
式中ks為與結(jié)構(gòu)參數(shù)相關(guān)的常數(shù).敏感端的諧振位移改變質(zhì)量與檢測(cè)電極之間的電容值,當(dāng)質(zhì)量塊上加載固定電壓時(shí),電容上的電荷就會(huì)發(fā)生如上式所示的周期性變化,利用電學(xué)方法檢測(cè)出該電荷變化量,就能夠得到輸入角速度[5].
2 MEMS硅陀螺接口電路設(shè)計(jì)
圖2為MEMS陀螺接口電路,主要由兩部分組成:前級(jí)模擬電路和高精度Sigma Delta ADC.其中前級(jí)模擬電路實(shí)現(xiàn)陀螺的閉環(huán)自激驅(qū)動(dòng)、低噪聲差分檢測(cè)以及用于降低低頻噪聲的高頻調(diào)制模塊,從而得到角速度輸出的模擬量.ADC實(shí)現(xiàn)將模擬輸出轉(zhuǎn)化為數(shù)字輸出[6-7].之所以采用雙片集成是因?yàn)閷?duì)于集成電路而言,數(shù)模電路共用襯底,數(shù)字電路的時(shí)鐘對(duì)用于微弱信號(hào)檢測(cè)的模擬電路噪聲影響較大,難以克服,而雙片對(duì)于面積的開(kāi)銷(xiāo)增加不是十分顯著,可以接受.以上也是目前多數(shù)數(shù)字陀螺研究采用雙片集成的原因.

圖2 數(shù)字陀螺儀整體電路
2.1 模擬前級(jí)電路設(shè)計(jì)
模擬前級(jí)包括閉環(huán)自激驅(qū)動(dòng)電路和低噪聲檢測(cè)電路.在驅(qū)動(dòng)電路中,上電加載飽和直流驅(qū)動(dòng)電壓,由于噪聲擾動(dòng),質(zhì)量塊開(kāi)始振蕩,電荷放大器將質(zhì)量塊位移信號(hào)轉(zhuǎn)化為電壓信號(hào),相位轉(zhuǎn)換電路對(duì)該信號(hào)精確移相90°以抵消驅(qū)動(dòng)力和位移之間的相位差,從而滿足諧振條件.相位調(diào)整后,由峰值檢測(cè)電路計(jì)算前級(jí)電壓信號(hào)幅值,通過(guò)PID控制與參考電壓比較后積分,得到動(dòng)態(tài)變化的直流積分電壓,將該直流電壓疊加峰值檢測(cè)前的交流信號(hào)作為驅(qū)動(dòng)信號(hào),完成正反饋?zhàn)约ふ袷嶽8].這樣,既能保證交流驅(qū)動(dòng)信號(hào)幅值穩(wěn)定又能動(dòng)態(tài)調(diào)整直流驅(qū)動(dòng),保證驅(qū)動(dòng)位移恒定.敏感檢測(cè)電路主要考慮低噪聲性能,采用差分低噪聲電荷放大器保證噪聲性能,后級(jí)采用相敏解調(diào)和低通濾波得到角速度信號(hào).
在本電路設(shè)計(jì)中,采用在質(zhì)量塊上加載高頻調(diào)制的方法實(shí)現(xiàn)低噪聲設(shè)計(jì).圖2中高頻正弦信號(hào)由有源穩(wěn)幅RC振蕩器產(chǎn)生.圖3解釋了該原理降噪過(guò)程,電荷放大器在低頻處的1/f噪聲功率高于信號(hào)功率,白噪聲功率則低于信號(hào)功率.陀螺諧振信號(hào)被調(diào)制到高頻處,與噪聲是疊加關(guān)系.解調(diào)時(shí),調(diào)制后的信號(hào)被解調(diào)至陀螺諧振頻率,而放大器的1/f噪聲被調(diào)制至高頻處.然后通過(guò)低通濾波器消除高頻處的1/f噪聲,剩下了低功率的白噪聲和真正的信號(hào)在低頻處,從而實(shí)現(xiàn)降低噪聲的目的[9].

圖3 高頻調(diào)制信號(hào)的功能
2.2 高精度ADC設(shè)計(jì)
為了將模擬輸出轉(zhuǎn)換為數(shù)字輸出,需要一個(gè)高精度的ADC.在所有的ADC中,sigma delta ADC通過(guò)低帶寬的過(guò)采樣和噪聲整形技術(shù)可以達(dá)到高精度要求,這種ADC由sigma delta調(diào)制器和數(shù)字抽取濾波器組成.本設(shè)計(jì)采用了四階單環(huán)一位的sigma delta調(diào)制器,因?yàn)樵摻Y(jié)構(gòu)的調(diào)制器比級(jí)聯(lián)結(jié)構(gòu)能夠承受更大的工藝誤差,而且一位量化使得電路的復(fù)雜度低于多位量化的復(fù)雜度.第1級(jí)積分器的輸入信號(hào)只有量化噪聲,而且輸入幅度比其他類(lèi)型的要小許多,積分器的輸出擺幅相對(duì)較小有利于低失調(diào)[10].
圖4顯示了在0.5 um的CSMC工藝下的調(diào)制器電路.全差分電路的精度比單端電路要高3 dB,而且能夠消除諧波失真并且具有低失調(diào)特點(diǎn).硅陀螺的模擬信號(hào)對(duì)帶寬的要求較低,一般輸出帶寬在100 Hz以內(nèi),在sigma delta調(diào)制器的噪聲源中,1/f噪聲是重要的組成部分,它能顯著的降低轉(zhuǎn)換精度.因此,在第1級(jí)積分器中采用斬波技術(shù)來(lái)降低1/f噪聲[11].

圖4 sigma delta調(diào)制器
sigma delta調(diào)制器輸出的一位比特流信號(hào),很難被信號(hào)處理系統(tǒng)直接處理,而且,高輸出頻率會(huì)使得數(shù)字電路的功耗增加.所以,數(shù)字抽取濾波器被用來(lái)濾除信號(hào)帶寬外的噪聲并使得采樣頻率降低.在本文中,數(shù)字抽取濾波器通過(guò)單片機(jī)實(shí)現(xiàn),然后sigma delta ADC以Nyquist ADC形式工作,并且具有18位的精度.
2.3 晶體管級(jí)設(shè)計(jì)
除了電路拓?fù)浣Y(jié)構(gòu)以外,電路模塊自身的設(shè)計(jì)對(duì)陀螺的噪聲、穩(wěn)定性、線性度以及溫度特性也起到至關(guān)重要的影響,其中最重要的就是運(yùn)算放大器的設(shè)計(jì).由于采用高頻調(diào)制原理降低噪聲,對(duì)放大器的帶寬有較高要求,需要設(shè)計(jì)一款大帶寬、低噪聲、低失真的運(yùn)算放大器.本文采用二級(jí)運(yùn)放,前級(jí)采用套筒式運(yùn)放滿足高帶寬、低噪聲,輸出級(jí)共源級(jí)運(yùn)放實(shí)現(xiàn)大擺幅輸出.運(yùn)放結(jié)構(gòu)如圖5所示,采用米勒補(bǔ)償提高運(yùn)放速度.該運(yùn)放增益帶寬積正比于跨導(dǎo),通過(guò)設(shè)計(jì)恒定跨導(dǎo)偏置電路就可以增加跨導(dǎo),進(jìn)而增大帶寬并實(shí)現(xiàn)帶寬恒定.該運(yùn)放的噪聲取決于輸入管和負(fù)載管的熱噪聲和1/f噪聲,而高跨導(dǎo)共源共柵結(jié)構(gòu)的負(fù)載管噪聲遠(yuǎn)小于輸入管噪聲,運(yùn)放噪聲為
式中:右側(cè)第1項(xiàng)為輸入管熱噪聲,第2項(xiàng)為1/f噪聲;k為玻爾茲曼常數(shù);T為絕對(duì)溫度;gm為輸入管跨導(dǎo);KP為1/f噪聲系數(shù);W、L分別為輸入管的寬和長(zhǎng);Cox為氧化層電容;f為頻率.可以看出,熱噪聲水平隨著跨導(dǎo)的增加而降低,1/f噪聲隨著輸入管面積的增加而降低,據(jù)此可以優(yōu)化運(yùn)放噪聲[12].

圖5 低噪聲恒定跨導(dǎo)運(yùn)算放大器
Fig.5 Low noise constant transconductance operational amplifier
相敏解調(diào)是另一個(gè)重要電路模塊,本設(shè)計(jì)采用開(kāi)關(guān)相敏解調(diào),用比較器控制CMOS傳輸門(mén)開(kāi)關(guān)實(shí)現(xiàn),其優(yōu)點(diǎn)是電路結(jié)構(gòu)簡(jiǎn)單、開(kāi)關(guān)導(dǎo)通電阻低、轉(zhuǎn)換速率快,易于實(shí)現(xiàn)高速低失真要求.
3 測(cè)試結(jié)果
如圖6所示為MEMS陀螺測(cè)試系統(tǒng),陀螺結(jié)構(gòu)采用真空封裝,接口電路采用模擬前級(jí)和高精度調(diào)制器雙片集成方式,數(shù)字濾波器由單片機(jī)實(shí)現(xiàn).樣機(jī)整機(jī)尺寸為2.5 mm×3.0 mm×2.5 mm,實(shí)現(xiàn)了小型化目的.
首先對(duì)sigma delta 調(diào)制器進(jìn)行測(cè)試.當(dāng)輸入的信號(hào)的直流電壓為50 mV時(shí),數(shù)字輸出信號(hào)的功率譜密度如圖7所示,噪底接近-140 dB.
當(dāng)采樣頻率為2.5 MHz時(shí),該調(diào)制器能夠得到10 kHz的帶寬和130 dB的1 Hz動(dòng)態(tài)范圍,滿足接口電路的性能需要.

圖6 陀螺整機(jī)測(cè)試系統(tǒng)

圖7 sigma delta調(diào)制器的輸出功率譜密度
Fig.7 Output power spectrum density of the sigma delta modulator
整機(jī)測(cè)試中,首先測(cè)試刻度因數(shù)及線性度,將陀螺固定在轉(zhuǎn)臺(tái)上,施加從±0.1 °/s到±200 °/s不同的輸入角速度,sigma delta ADC的輸出信號(hào)為18位.圖8為數(shù)字硅陀螺系統(tǒng)的輸入和輸出線性擬合曲線,在測(cè)量范圍為±200 °/s以內(nèi),可以計(jì)算出刻度因數(shù)為46.45 LSB/((°)s-1),線性度為342 ×10-6.
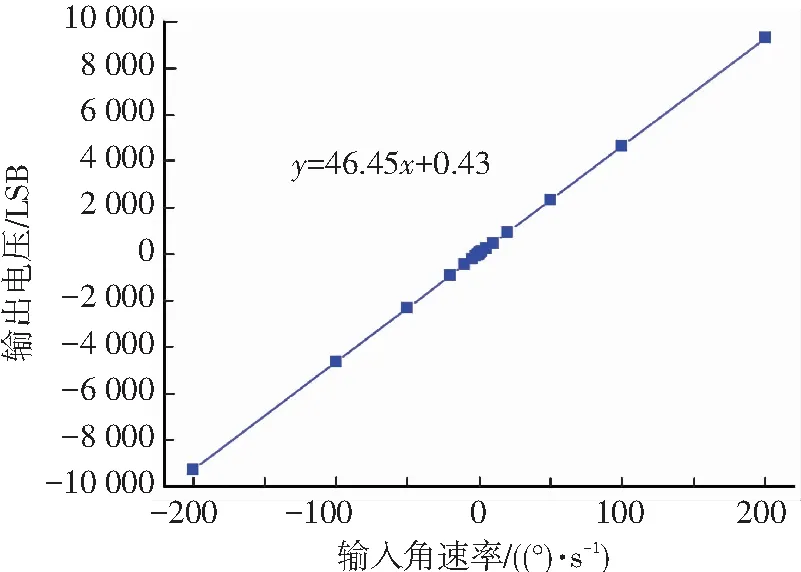
圖8 數(shù)字陀螺輸入輸出線性擬合曲線
對(duì)硅陀螺進(jìn)行1 h短期穩(wěn)定性測(cè)試,圖9為通過(guò)Allan方差方法得出的零偏穩(wěn)定性分析圖.實(shí)驗(yàn)結(jié)果表明,短期穩(wěn)定性能夠達(dá)到3.4 °/h,該接口電路在60 Hz的帶寬內(nèi),噪聲功率譜密度為0.004 ((°)s-1)/Hz1/2.
表1將本文中設(shè)計(jì)的高精度數(shù)字化陀螺接口電路與近幾年有代表性的研究機(jī)構(gòu)和企業(yè)所研究的陀螺性能做了對(duì)比.與其他高性能模擬、數(shù)字接口電路相比,本設(shè)計(jì)能夠精確的輸出數(shù)字信號(hào),線性度和穩(wěn)定性達(dá)到高性能應(yīng)用水平.

圖9 陀螺輸出的Allan方差結(jié)果

性能指標(biāo)UCBerkeley[13]2008GhentUniversity[14]2008STIM202東南大學(xué)[15]2015本設(shè)計(jì)2016輸出類(lèi)型模擬數(shù)字?jǐn)?shù)字?jǐn)?shù)字?jǐn)?shù)字刻度因子—7.73LSB/((°)?s-1)0.25((°)?s-1)/LSB94.00LSB/((°)?s-1)46.45LSB/((°)?s-1)測(cè)量范圍—>±1100°/s±400°/s±300°/s±200°/s輸出噪聲0.004((°)?s-1)/√Hz0.025((°)?s-1)/√Hz0.003((°)?s-1)/√Hz0.005((°)?s-1)/√Hz0.004((°)?s-1)/√Hz帶寬50Hz>100Hz262Hz75Hz60Hz非線性度——200.0×10-683.1×10-6342.0×10-6零偏穩(wěn)定性——0.50°/s(1σ)2.94°/h3.40°/h電路形式集成芯片分立芯片分立芯片分立芯片集成芯片
4 結(jié) 論
1)基于高頻載波原理實(shí)現(xiàn)的閉環(huán)驅(qū)動(dòng)、低噪聲檢測(cè)模擬電路可有效降低低頻噪聲,傳感器輸出噪聲功率譜密度為0.004((°)s-1)/√Hz.
2)基于Σ-Δ調(diào)制器的高精度ADC,可以達(dá)到10 kHz的帶寬和130 dB的動(dòng)態(tài)范圍,滿足實(shí)用化需求.
3)采用標(biāo)準(zhǔn)0.5 um的N阱 CMOS工藝實(shí)現(xiàn)了電路集成化,實(shí)現(xiàn)了對(duì)分立器件電路的高精度數(shù)字化、小型化設(shè)計(jì)目標(biāo).
[1] AALTONEN L, HALONEN K A I. Pseudo-continuous-time readout circuit for a 300° /s capacitive 2-axis micro-gyroscope[J]. IEEE Journal of Solid-State Circuits, 2009, 44(12):3609-3620. DOI: 10.1109/JSSC.2009.2035554.
[2] AALTONEN L, KALANTI A, PULKKINEN M, et al. A 2.2mA 4.3mm2ASIC for a 1000°/s 2-axis capacitive micro-gyroscope[J]. IEEE Journal of Solid-State Circuits, 2011, 46(7):1682-1692.DOI: 10.1109/JSSC.2011.2144170.
[3] AALTONENL, KALANTI A,PULKKINEN M, et al. A 4.3 mm2ASIC for a 300°/s 2-axis capacitive micro-gyroscope//Proceedings of the 2010 Eur. Solid-State Circuits Conf. (ESSCIRC). Seville, Spain: IEEE, 2010: 286-289. DOI: 10.1109/ESSCIRC.2010.5619834.
[4] SHARMA A, ZAMAN M F, AYAZI F. A 104-dB dynamic range transimpedance-based CMOS ASIC for tuning fork microgyroscopes[J]. IEEE Journal of Solid-State Circuits, 2007, 42(8):1790-1802. DOI: 10.1109/JSSC.2007.900282.
[5] WANG Xiaolei, ZHANG Yinqiang, YANG Cheng, et al. Analysis and experiment of drive mode of silicon micro-gyroscope based on digital phased-locked loop control[J]. Journal of Southeast University (Natural Science Edition), 2013, 43(4):747-752.DOI: 10.3969/j.issn.1001-0505.2013.04.014.
[6] XIA Dunzhu, HU Yiwei, KONG Lun, et al. Design of a digitalized microgyroscope system using, modulation technology[J]. Journal IEEE Sensors, 2015, 15(7): 3793-3806. DOI: 10.1109/JSEN.2015.2399435.
[7] JIANG Xuesong, SEEGER J I, KRAFT M, et al. A monolithic surface micromachined Z-axis gyroscope with digital output[C]// 2000 Symposium on VLSI Circuits. Honolulu, HI: IEEE, 2000: 16-19. DOI: 10.1109/VLSIC.2000.852839.
[8] ENZ CC, TEMES G C. Circuit techniques for reducing the effects of op-amp imperfections: autozeroing, correlated double sampling, and chopper stabilization[J]. Proceedings of the IEEE, 1996, 84(11): 1584-1614.DOI: 10.1109/5.542410.
[9] RAMAN J, CRETU E, ROMBOUTS P,et al. A digitally controlled MEMS gyroscope with unconstrained Sigma-Delta force-feedback architecture[C]//Proceedings of the 19th IEEE International Conference on Micro Electro Mechanical Systems, 2006. MEMS 2006 Istanbul. Istanbul, Turkey: IEEE, 2006: 710-713. DOI: 10.1109/MEMSYS.2006.1627898.
[10]ZHANG Chong, YIN Tao, WU Qisong, et al. A large dynamic range CMOS readout circuit for MEMS vibratory gyroscope[C]//Proceedings of the 2008 IEEE SENSORS. Lecce, Italy: IEEE, 2008:1123-1126. DOI: 10.1109/ICSENS.2008.4716638.
[11]PETKOV V, BOSER P B. A fourth-order interface for micromachined inertial sensors[J]. IEEE Journal of Solid-State Circuits, 2005, 40(8): 1602-1609. DOI: 10.1109/JSSC.2005.852025.
[12]YUCETAS M, AALTONEN, HALONEN K.CMOS temperature sensor using periodic averaging for error reduction[C]//Proceedings of the 2008 NORCHIP. Tallin, Estonia: IEEE, 2008: 94-97. DOI: 10.1109/NORCHP.2008.4738290.
[13]EZEKWE C D, BOSER B E. A mode-matching ΔΣclosed-loop vibratory gyroscope readout interface with a 0.004°/s/Hz, noise floor over a 50Hz Band [C]//2008 IEEE International Solid-State Circuits Conference. San Francisco, CA: IEEE, 2008. DOI: 10.1109/ISSCC.2008.4523316.
[14]RAMAN J, CRETU E, ROMBOUTS P, et al. A closed-loop digitally controlled mems gyroscope with unconstrained sigma-delta force-feedback[J]. IEEE Sensors Journal, 2009,9(3):297-305.DOI: 10.1109/JSEN.2008.2012237.
[15]XIA Dunzhu, YU Cheng, WANG Yuliang. A digitalized silicon microgyroscope based on embedded FPGA[J]. Sensors, 2012, 12(10):13150-13166. DOI: 10.3390/s121013150.
Designandtestoftheinterfaceofthedual-chipintegrateddigitalsilicongyroscopeASIC
FU Qiang1,2, CHEN Weiping1,2, YAN Jingmin1, YIN Liang1,2, LIU Xiaowei1,2
(1.MEMS Center, Harbin Institute of Technology, Harbin 150001, China; 2.Key Laboratory of Micro-systems and Micro-structuresManufacturing of Ministry of Education (Harbin Institute of Technology), Harbin 150001, China)
In order to realize the high precision, digital and miniaturization of MEMS gyroscope, which is the application requirements of the field of inertial navigation and measurement, this paper designs and implements a practical MEMS gyroscope interface circuit which adopts the process of dual-chip integration, integrated based on N-well CMOS process of 0.5 μm. The paper introduces the design of analog front-end circuit which contains closed-loop self-exciting driving structure based on high-frequency carrier and low noise differential sensitive detection circuit. The high frequency signal modulates the sensitive signal to the high frequency and adds the flicker noise. Through the phase sensitive demodulation and low-pass filtering, the low noise analog angular speed output is obtained. The circuit converts analog signal into digital signal by an integrated high-resolution sigma delta four-order single ring one bit ADC, achieving an interface circuit of silicon gyroscope with digital output. Test results show that the dynamic range of the modulator which bandwidth and scale factor are 60 Hz and 46.45 LSB/(°)·s-1, respectively, is up to 130 dB, and the measuring range of gyroscope is ±200 °/s. The linearity of the modulator with the noise of 0.004 (°)·s-1/Hz1/2is 340×10-6, and the stability of the zero bias is 3.4 °/h. It enables miniaturization, low cost and precise digital output of angular speed through integrated circuit. Comparison of the test results with other related research also confirms that the structure can achieve good performance.
digitalized system; silicon gyroscope; sigma delta ADC; ASIC; low noise
10.11918/j.issn.0367-6234.201607103
TN492
A
0367-6234(2017)10-0090-05
2016-07-22
上海航天科技創(chuàng)新基金(SAST2015052)
付 強(qiáng)(1979—),男,博士研究生;
陳偉平(1966—),男,教授,博士生導(dǎo)師;
劉曉為(1955—),男,教授,博士生導(dǎo)師
陳偉平,qiangfhit@sina .com
(編輯張 紅)
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
中國(guó)生殖健康(2019年3期)2019-02-01 06:12:26
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25
海軍航空大學(xué)學(xué)報(bào)(2015年3期)2015-11-11 17:20:00
