基于小生境多目標(biāo)粒子群算法的電動(dòng)汽車(chē)傳動(dòng)系統(tǒng)速比動(dòng)態(tài)優(yōu)化?
2017-11-08 02:01:15葉山頂李易庭
汽車(chē)工程 2017年10期
關(guān)鍵詞:經(jīng)濟(jì)性優(yōu)化
宋 強(qiáng),葉山頂,高 朋,李易庭
(1.北京理工大學(xué)機(jī)械與車(chē)輛學(xué)院,北京 100081; 2.北京電動(dòng)車(chē)輛協(xié)同創(chuàng)新中心,北京 100081)
基于小生境多目標(biāo)粒子群算法的電動(dòng)汽車(chē)傳動(dòng)系統(tǒng)速比動(dòng)態(tài)優(yōu)化?
宋 強(qiáng),葉山頂,高 朋,李易庭
(1.北京理工大學(xué)機(jī)械與車(chē)輛學(xué)院,北京 100081; 2.北京電動(dòng)車(chē)輛協(xié)同創(chuàng)新中心,北京 100081)
為獲得最佳整車(chē)經(jīng)濟(jì)性能,在純電動(dòng)汽車(chē)傳動(dòng)系統(tǒng)速比靜態(tài)優(yōu)化的基礎(chǔ)上,針對(duì)其未對(duì)不同速比采用相應(yīng)的換擋規(guī)律的不足,基于換擋點(diǎn)判斷規(guī)則,提出一種考慮換擋規(guī)律變化的傳動(dòng)系統(tǒng)速比動(dòng)態(tài)優(yōu)化方法;基于輕量化設(shè)計(jì)原則,提出一種傳動(dòng)系統(tǒng)各擋速比值總和最小的目標(biāo)函數(shù),采用能避免局部收斂的小生境多目標(biāo)粒子群算法對(duì)目標(biāo)函數(shù)進(jìn)行ISIGHT-MATLAB/Simulink聯(lián)合仿真優(yōu)化。優(yōu)化結(jié)果(包括靜態(tài)和動(dòng)態(tài))取得一定的效果:與未考慮換擋規(guī)律的優(yōu)化相比,在不同情況下,整車(chē)能耗減少了1.09%~1.35%,傳動(dòng)比值總和降低了8.06%~9.76%;但0-100km/h加速時(shí)間增加了1.90%~2.11%,可能與優(yōu)化目標(biāo)函數(shù)的加權(quán)仍偏重于經(jīng)濟(jì)性有關(guān)。與考慮靜態(tài)換擋規(guī)律優(yōu)化相比,考慮動(dòng)態(tài)換擋規(guī)律優(yōu)化的結(jié)果,傳動(dòng)比值總和的降幅增加了0.95%~1.70%,但整車(chē)能耗與考慮靜態(tài)換擋規(guī)律優(yōu)化結(jié)果基本持平,未顯示出針對(duì)不同傳動(dòng)比采用不同換擋規(guī)律進(jìn)行優(yōu)化的預(yù)期效果,其原因尚待今后進(jìn)一步深入探究。
電動(dòng)汽車(chē);速比動(dòng)態(tài)優(yōu)化;小生境多目標(biāo)粒子群算法;傳動(dòng)系統(tǒng)輕量化設(shè)計(jì)
前言
近年來(lái),純電動(dòng)汽車(chē)以其零排放、噪聲小、易控制等優(yōu)點(diǎn)受到各國(guó)汽車(chē)工業(yè)的青睞。但是現(xiàn)有技術(shù)條件下,動(dòng)力電池比能量密度小于燃油水平,其續(xù)航能力極大地制約了純電動(dòng)汽車(chē)的發(fā)展和普及[1]。驅(qū)動(dòng)電機(jī)和變速器作為純電動(dòng)汽車(chē)驅(qū)動(dòng)系統(tǒng)的關(guān)鍵部件,通過(guò)對(duì)其進(jìn)行合理的參數(shù)匹配和設(shè)計(jì)優(yōu)化,使其在相同動(dòng)力電池條件下,最大程度地提升整車(chē)的續(xù)駛里程顯得十分必要。
目前國(guó)內(nèi)外很多學(xué)者針對(duì)純電動(dòng)汽車(chē)傳動(dòng)系統(tǒng)參數(shù)匹配與優(yōu)化都有研究。文獻(xiàn)[2]中對(duì)匹配固定減速比和兩擋速比的純電動(dòng)汽車(chē)的整車(chē)性能進(jìn)行對(duì)比分析,并利用遺傳算法對(duì)固定減速比和兩擋速比進(jìn)行優(yōu)化,結(jié)果表明匹配兩擋速比的純電動(dòng)汽車(chē)具有更好的性能。文獻(xiàn)[3]中基于整車(chē)動(dòng)力性和經(jīng)濟(jì)性建立雙目標(biāo)函數(shù)下的傳動(dòng)比優(yōu)化模型,利用基于模擬退火的粒子群算法進(jìn)行優(yōu)化,動(dòng)力性指標(biāo)提升了2.85%,經(jīng)濟(jì)性指標(biāo)提升了6.07%。文獻(xiàn)[4]中結(jié)合整車(chē)耗電量最小所對(duì)應(yīng)的電機(jī)恒功率擴(kuò)大系數(shù)β和傳動(dòng)比的耦合關(guān)系,進(jìn)一步確定了傳動(dòng)系統(tǒng)的擋位數(shù)和傳動(dòng)比,為電動(dòng)汽車(chē)速比優(yōu)化提供了一種新的方法。但是,文獻(xiàn)[2]~文獻(xiàn)[4]中在進(jìn)行速比優(yōu)化時(shí)均未考慮換擋規(guī)律對(duì)燃油經(jīng)濟(jì)性的影響,據(jù)此,文獻(xiàn)[5]中基于電機(jī)轉(zhuǎn)速建立了換擋策略,利用多目標(biāo)遺傳算法對(duì)傳動(dòng)系速比進(jìn)行了優(yōu)化,并在AVL Cruise中進(jìn)行整車(chē)動(dòng)力性和經(jīng)濟(jì)性仿真;文獻(xiàn)[6]中提出了一種考慮整車(chē)驅(qū)動(dòng)系統(tǒng)效率特性的速比優(yōu)化方案,結(jié)合車(chē)速和踏板行程給出某一具體的換擋規(guī)律曲線(xiàn),并利用該曲線(xiàn)對(duì)速比進(jìn)行仿真優(yōu)化;文獻(xiàn)[7]中以某一固定車(chē)速(50km/h)作為換擋臨界點(diǎn),采用多目標(biāo)遺傳算法對(duì)整車(chē)優(yōu)化問(wèn)題進(jìn)行求解,得到Pareto最優(yōu)解;文獻(xiàn)[8]中利用優(yōu)化前的傳動(dòng)比初始值建立兩參數(shù)換擋規(guī)律,然后以傳動(dòng)比為變量,提出一種既能解決配齒問(wèn)題,又能使電機(jī)工作在高效區(qū)域的傳動(dòng)比區(qū)間優(yōu)化方法。但是,文獻(xiàn)[5]~文獻(xiàn)[8]中在速比優(yōu)化過(guò)程中采用的換擋規(guī)律是恒定不變的,即其換擋規(guī)律是靜態(tài)的,不能適應(yīng)速比優(yōu)化動(dòng)態(tài)過(guò)程。實(shí)際上,整個(gè)速比優(yōu)化過(guò)程中的傳動(dòng)比數(shù)值是不斷變化的,針對(duì)不同速比應(yīng)采用不同的換擋規(guī)律,才能獲得最佳經(jīng)濟(jì)性能。
據(jù)此,本文中以純電動(dòng)汽車(chē)兩擋AMT變速器為研究對(duì)象,提出一種純電動(dòng)汽車(chē)傳動(dòng)系速比動(dòng)態(tài)優(yōu)化方法。該方法結(jié)合NEDC循環(huán)工況和動(dòng)態(tài)換擋規(guī)律,利用小生境多目標(biāo)粒子群算法,在 MATLAB/Simulink和ISIGHT聯(lián)合仿真平臺(tái)上對(duì)傳動(dòng)系速比進(jìn)行動(dòng)態(tài)優(yōu)化,得到了傳動(dòng)比最優(yōu)值。
1 整車(chē)設(shè)計(jì)參數(shù)與電機(jī)參數(shù)匹配
1.1 整車(chē)設(shè)計(jì)參數(shù)
某款純電動(dòng)汽車(chē)主要參數(shù)和性能指標(biāo)如表1所示。
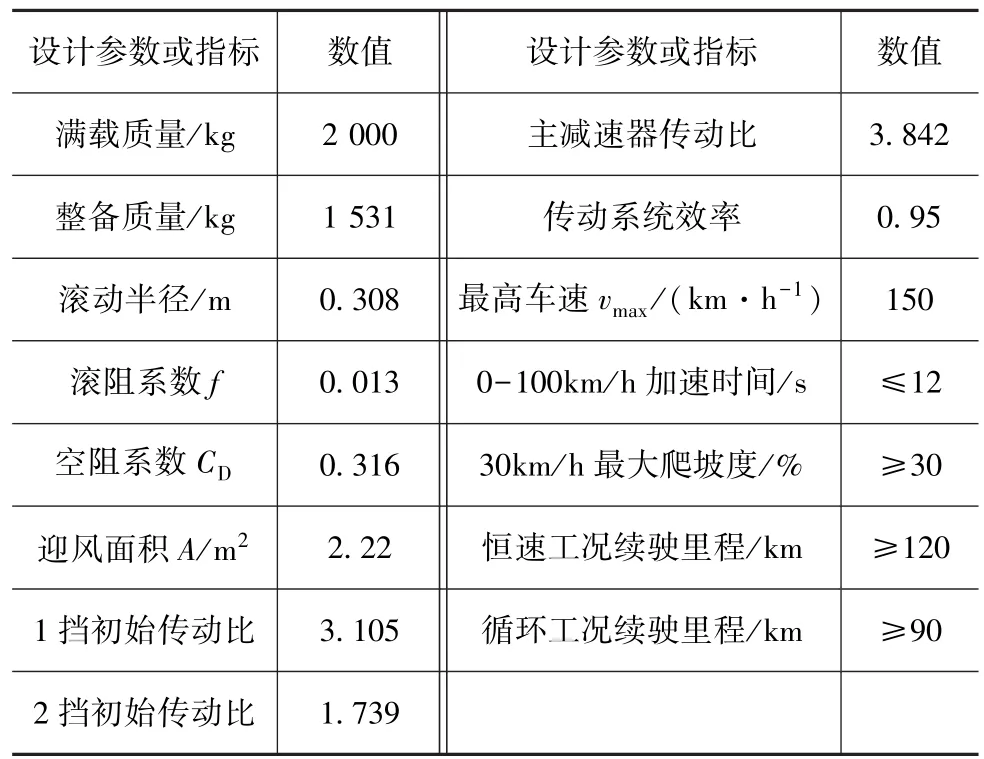
表1 整車(chē)參數(shù)與設(shè)計(jì)指標(biāo)
1.2 電機(jī)參數(shù)匹配
驅(qū)動(dòng)電機(jī)作為純電動(dòng)汽車(chē)唯一的動(dòng)力源,其匹配結(jié)果直接影響整車(chē)的動(dòng)力性和經(jīng)濟(jì)性。電機(jī)主要工作特性參數(shù)有額定功率、峰值功率、過(guò)載系數(shù)和最高轉(zhuǎn)速等。
1.2.1 驅(qū)動(dòng)電機(jī)額定功率計(jì)算
驅(qū)動(dòng)電機(jī)額定功率用于保證純電動(dòng)汽車(chē)以某一車(chē)速穩(wěn)定行駛在道路上,使電機(jī)能在高效率區(qū)域附近工作。額定功率匹配不當(dāng),易使電機(jī)時(shí)常在較低效率區(qū)域運(yùn)行,直接降低了整車(chē)經(jīng)濟(jì)性。本文中以最高設(shè)計(jì)車(chē)速來(lái)初步確定電機(jī)的額定功率,它應(yīng)大于或等于電動(dòng)汽車(chē)在水平道路上以最高車(chē)速行駛時(shí)各種行駛阻力消耗的功率之和[9]:式中:Pe為滿(mǎn)足最高車(chē)速消耗的功率;m為滿(mǎn)載質(zhì)量;ηt為傳動(dòng)系機(jī)械效率;g為重力加速度。帶入相關(guān)參數(shù)計(jì)算得,Pe=43.91kW。

1.2.2 驅(qū)動(dòng)電機(jī)峰值功率
驅(qū)動(dòng)電機(jī)峰值功率用于保證電動(dòng)汽車(chē)有足夠的后備功率滿(mǎn)足整車(chē)動(dòng)力性能,如最高車(chē)速、不同車(chē)速下的最大爬坡度、加速能力。峰值功率不是越大越好,如若選擇不當(dāng),不僅會(huì)增加整車(chē)質(zhì)量,而且會(huì)間接增加電池容量負(fù)擔(dān),降低了電動(dòng)車(chē)的續(xù)航里程。本文中以0-100km/h加速時(shí)間的要求來(lái)確定峰值功率[10]:
式中:Pamax為加速過(guò)程中的最大功率需求;vm為加速終止時(shí)刻的車(chē)速;tm為加速時(shí)間;Δt為迭代步長(zhǎng),一般取值0.1即可滿(mǎn)足計(jì)算精度要求;x為擬合系數(shù),一般取值 0.5。帶入相關(guān)參數(shù)計(jì)算得到,Pamax=87.69kW。
1.3 電機(jī)工作特性圖和效率圖
經(jīng)過(guò)上述參數(shù)匹配,最終選定由上海電驅(qū)動(dòng)股份有限公司提供的電機(jī),其部分技術(shù)參數(shù)如表2所示,其實(shí)物圖如圖1所示。與電機(jī)匹配的兩擋AMT,其1擋和2擋的傳動(dòng)比數(shù)值已被優(yōu)化,但在優(yōu)化過(guò)程中未考慮換擋規(guī)律對(duì)速比優(yōu)化的影響,未能使整車(chē)經(jīng)濟(jì)性能達(dá)到最優(yōu)。具體數(shù)值也列于表1中。
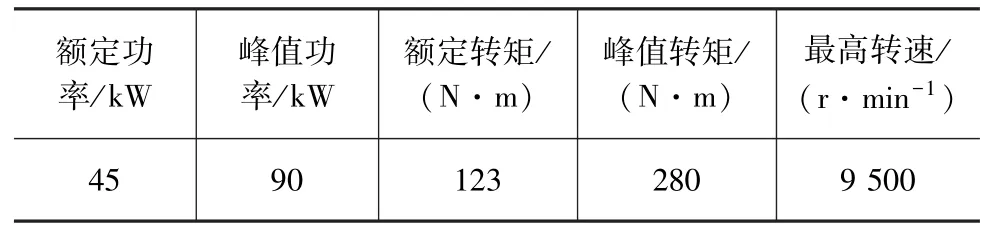
表2 驅(qū)動(dòng)電機(jī)部分技術(shù)參數(shù)

圖1 電機(jī)與兩擋AMT實(shí)物圖
利用實(shí)驗(yàn)數(shù)據(jù),通過(guò)MATLAB插值計(jì)算得到驅(qū)動(dòng)電機(jī)負(fù)載特性,如圖2所示;驅(qū)動(dòng)電機(jī)效率MAP圖,如圖3所示。
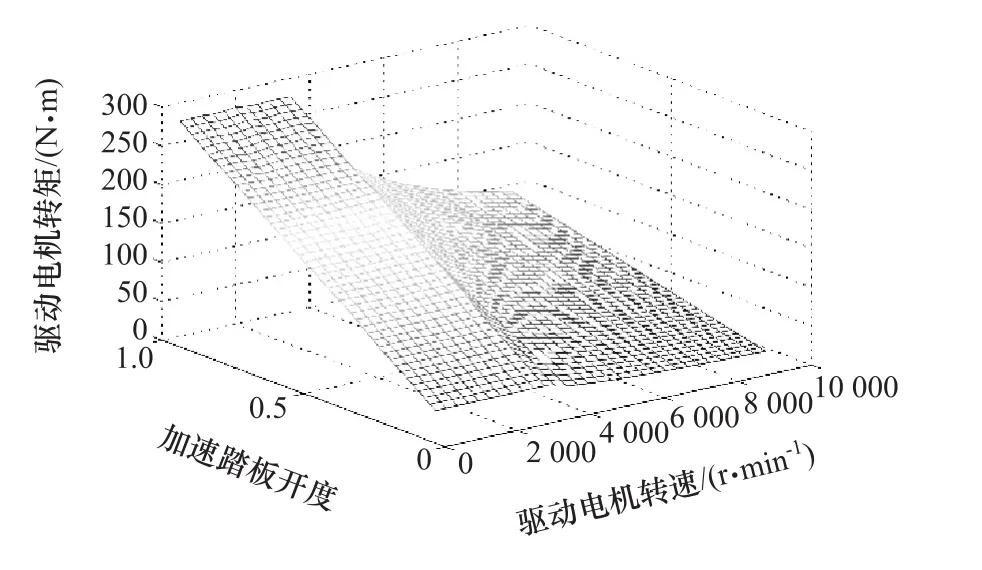
圖2 驅(qū)動(dòng)電機(jī)負(fù)載特性曲線(xiàn)

圖3 驅(qū)動(dòng)電機(jī)效率MAP圖
2 傳動(dòng)系統(tǒng)速比動(dòng)態(tài)優(yōu)化思路
2.1 靜態(tài)優(yōu)化思路
從整車(chē)性能的角度,可將換擋規(guī)律分為最佳動(dòng)力性換擋規(guī)律和最佳經(jīng)濟(jì)性換擋規(guī)律。換擋規(guī)律決定了整車(chē)在運(yùn)行過(guò)程中采取的最佳擋位值,將直接影響整車(chē)的能量效率[11]。上述兩種換擋規(guī)律只能在傳動(dòng)系統(tǒng)速比確定的情況下才可確定[12],而傳動(dòng)系統(tǒng)速比在優(yōu)化過(guò)程中是處于不斷變化的,因此不能通過(guò)傳統(tǒng)方法來(lái)綜合確定速比優(yōu)化所需的換擋規(guī)律。文獻(xiàn)[5]~文獻(xiàn)[8]、文獻(xiàn)[13]和文獻(xiàn)[14]中通過(guò)其他方法確定了一種適用于傳動(dòng)系統(tǒng)速比優(yōu)化的靜態(tài)換擋規(guī)律。例如,文獻(xiàn)[14]中在進(jìn)行傳動(dòng)比優(yōu)化前,在傳動(dòng)比可行域內(nèi)假定了變速器傳動(dòng)比i1=7.73,i2=4.80,然后通過(guò)文獻(xiàn)[12]中所述方法建立兩參數(shù)靜態(tài)經(jīng)濟(jì)性換擋規(guī)律,并以此換擋規(guī)律對(duì)傳動(dòng)比進(jìn)行優(yōu)化。
為充分對(duì)比靜態(tài)優(yōu)化思路和動(dòng)態(tài)優(yōu)化思路下的傳動(dòng)系統(tǒng)速比優(yōu)化結(jié)果,本文中以表1中初始傳動(dòng)比值為依據(jù),文獻(xiàn)[12]和文獻(xiàn)[14]中所述方法建立兩參數(shù)靜態(tài)經(jīng)濟(jì)性換擋規(guī)律,如圖4所示。

圖4 兩參數(shù)靜態(tài)經(jīng)濟(jì)性換擋曲線(xiàn)
2.2 動(dòng)態(tài)優(yōu)化思路
本文中通過(guò)ISIGHT-MATLAB/Simulink聯(lián)合仿真優(yōu)化軟件平臺(tái)和換擋點(diǎn)判斷規(guī)則實(shí)現(xiàn)傳動(dòng)系統(tǒng)速比動(dòng)態(tài)優(yōu)化。換擋點(diǎn)判斷規(guī)則分為動(dòng)力性換擋點(diǎn)判斷和經(jīng)濟(jì)性換擋點(diǎn)判斷。動(dòng)力性換擋點(diǎn)判斷:電動(dòng)汽車(chē)從起步加速到100km/h過(guò)程中,若當(dāng)前擋位的驅(qū)動(dòng)力小于另一擋位的驅(qū)動(dòng)力,實(shí)現(xiàn)換擋;經(jīng)濟(jì)性換擋點(diǎn)判斷:在NEDC循環(huán)工況下,根據(jù)當(dāng)前變速器擋位和整車(chē)車(chē)速計(jì)算出電機(jī)的轉(zhuǎn)速、轉(zhuǎn)矩,再查詢(xún)電機(jī)MAP圖可得當(dāng)前擋位的電機(jī)效率;同理,求出此時(shí)電機(jī)在另一擋位時(shí)的工作效率,通過(guò)比較兩個(gè)擋位下的電機(jī)工作效率,如果電機(jī)當(dāng)前擋位的工作效率較低,且經(jīng)過(guò)延時(shí)t后,其電機(jī)效率仍然較低,則實(shí)現(xiàn)換擋,否則,繼續(xù)保持當(dāng)前擋位行駛。圖5為傳動(dòng)系統(tǒng)速比動(dòng)態(tài)優(yōu)化思路示意圖。
圖5中,在每次迭代優(yōu)化過(guò)程中,ISIGHT會(huì)自動(dòng)調(diào)用MATLAB軟件,并對(duì)MATLAB所建模型中的兩個(gè)擋位速比進(jìn)行賦值,然后結(jié)合換擋點(diǎn)判斷規(guī)則確定電動(dòng)汽車(chē)在各個(gè)工況下所需的最佳擋位值。通過(guò)上述思路就確保了在若干次迭代優(yōu)化過(guò)程中,換擋規(guī)律是與優(yōu)化過(guò)程相適應(yīng)的,從而實(shí)現(xiàn)了傳動(dòng)系統(tǒng)速比動(dòng)態(tài)優(yōu)化。
3 基于小生境多目標(biāo)粒子群算法的傳動(dòng)系統(tǒng)速比動(dòng)態(tài)優(yōu)化
3.1 小生境多目標(biāo)粒子群算法
傳動(dòng)系統(tǒng)速比動(dòng)態(tài)優(yōu)化包含多個(gè)目標(biāo)函數(shù),通常采用相關(guān)的多目標(biāo)優(yōu)化算法進(jìn)行求解。常用的算法包括多目標(biāo)遺傳算法、多目標(biāo)粒子群算法(MOPSO)、多目標(biāo)進(jìn)化算法等。本文中采用基于小生境的多目標(biāo)粒子群算法(niche multi-objective particle swarm optimization,NMOPSO)對(duì)傳動(dòng)系統(tǒng)速比進(jìn)行優(yōu)化。粒子群算法是1995年提出的一種種群智能計(jì)算方法[15]。相比傳統(tǒng)MOPSO算法,NMOPSO算法通過(guò)引入外部存檔技術(shù)、小生境共享機(jī)制和混沌變異,增強(qiáng)了算法的全局搜索能力,避免了早熟現(xiàn)象和局部收斂,保證了算法搜索精度[16-17]。
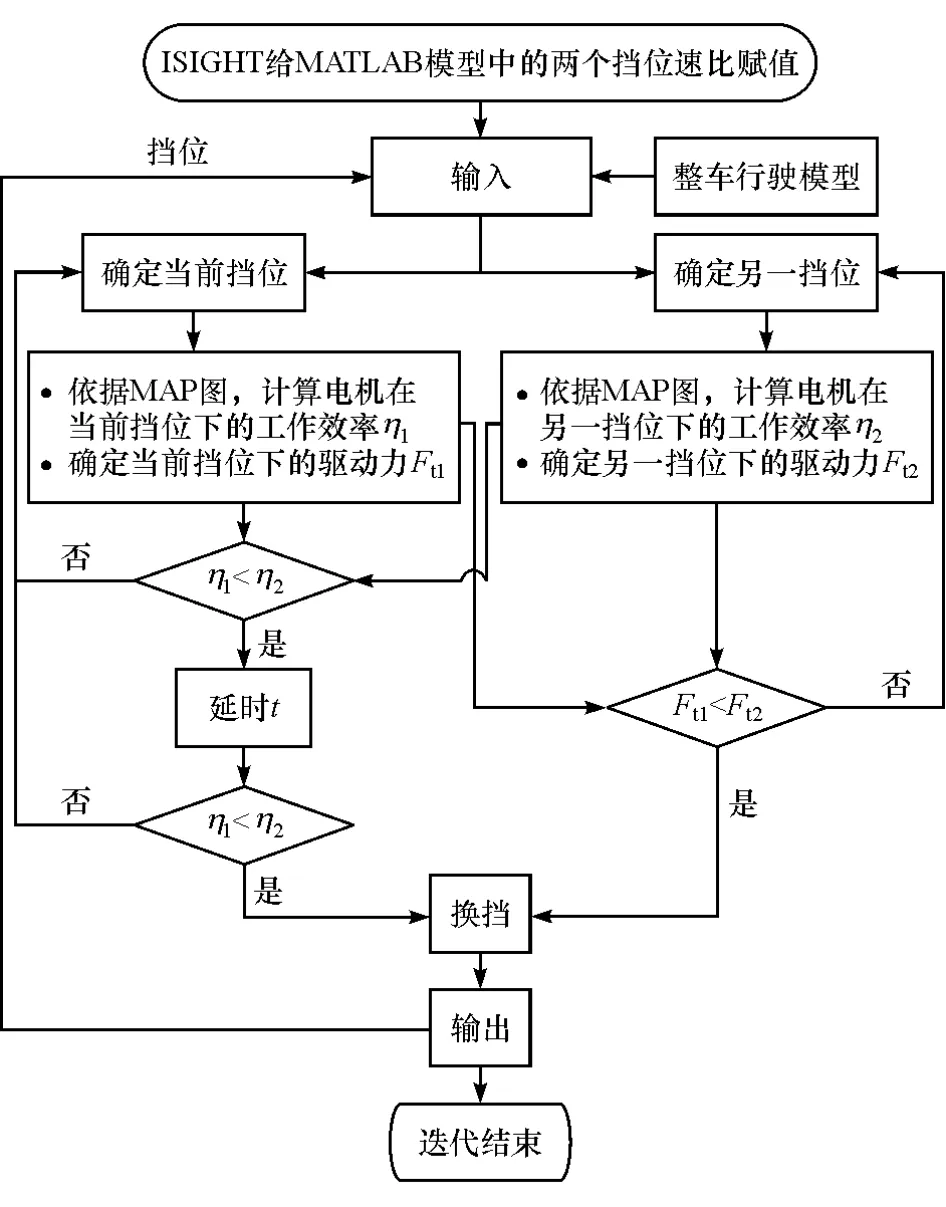
圖5 傳動(dòng)系統(tǒng)速比動(dòng)態(tài)優(yōu)化思路
小生境多目標(biāo)粒子群算法優(yōu)化的具體步驟如圖6所示。
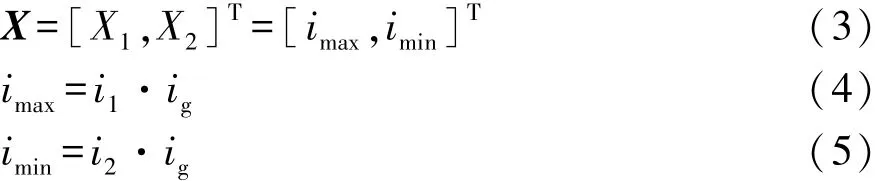
3.2 設(shè)計(jì)變量
當(dāng)驅(qū)動(dòng)電機(jī)和其他整車(chē)參數(shù)給定的情況下,影響整車(chē)動(dòng)力性和經(jīng)濟(jì)性的參數(shù)是傳動(dòng)系統(tǒng)的速比,包括各擋位傳動(dòng)比in和主減速器傳動(dòng)比ig。本文中選取的是2擋AMT自動(dòng)變速器,那么需要確定1擋傳動(dòng)比i1、2擋傳動(dòng)比i2和主減速比ig。故在進(jìn)行傳動(dòng)系統(tǒng)速比匹配時(shí),只需要確定最大速比imax和最小速比imin。因此本文的優(yōu)化設(shè)計(jì)變量為
3.3 目標(biāo)函數(shù)
本文中在對(duì)傳動(dòng)系統(tǒng)速比進(jìn)行動(dòng)態(tài)優(yōu)化時(shí),將以整車(chē)動(dòng)力性為約束條件,以標(biāo)準(zhǔn)循環(huán)工況(NEDC)下整車(chē)的能量、整車(chē)加速能力設(shè)計(jì)要求、輕量化設(shè)計(jì)原則為基準(zhǔn)建立相關(guān)目標(biāo)函數(shù)。

圖6 基于小生境多目標(biāo)粒子群算法流程
3.3.1 整車(chē)能耗目標(biāo)函數(shù)
采用NEDC循環(huán)工況下純電動(dòng)汽車(chē)整車(chē)的能量消耗作為經(jīng)濟(jì)性目標(biāo)函數(shù),其表達(dá)式如式(6)所示。整車(chē)能耗為驅(qū)動(dòng)電機(jī)在電動(dòng)工況狀態(tài)所消耗的能量與其在發(fā)電工況下回收的能量之差。

式中:Ttq為電機(jī)在電動(dòng)工況下的轉(zhuǎn)矩;Tb為電機(jī)在發(fā)電工況下的轉(zhuǎn)矩;ηm為驅(qū)動(dòng)電機(jī)效率;ηe為電池效率。
3.3.2 加速能力目標(biāo)函數(shù)
由表1可知,本文中所研究的純電動(dòng)汽車(chē)的0-100km/h加速時(shí)間設(shè)計(jì)要求為不大于12s。假設(shè)純電動(dòng)汽車(chē)在水平路面上進(jìn)行0-100km/h加速測(cè)試,則其加速時(shí)間為

式中:Ft為整車(chē)驅(qū)動(dòng)力;δn為汽車(chē)旋轉(zhuǎn)質(zhì)量換算系數(shù);t0為換擋時(shí)間,取0.8s。
3.3.3 傳動(dòng)系統(tǒng)輕量化目標(biāo)函數(shù)
為最大程度發(fā)揮整車(chē)經(jīng)濟(jì)性,在進(jìn)行整車(chē)設(shè)計(jì)時(shí)必須遵循“輕量化設(shè)計(jì)原則”。基于此原則,本文中提出一種傳動(dòng)系統(tǒng)的輕量化設(shè)計(jì)方案:在滿(mǎn)足整車(chē)動(dòng)力性和經(jīng)濟(jì)性的前提下,各擋傳動(dòng)比數(shù)值和最小,如式(8)所示。

與傳動(dòng)系統(tǒng)相關(guān)的參數(shù),如齒數(shù)、模數(shù)、齒厚、齒寬等參數(shù)確定后,影響傳動(dòng)系統(tǒng)體積與質(zhì)量的主要參數(shù)是傳動(dòng)比數(shù)值,當(dāng)各擋傳動(dòng)比數(shù)值和達(dá)到最小值時(shí),意味著傳動(dòng)系統(tǒng)在體積、質(zhì)量參數(shù)方面達(dá)到最小,滿(mǎn)足“輕量化設(shè)計(jì)原則”。
3.3.4 多目標(biāo)優(yōu)化問(wèn)題的轉(zhuǎn)化
通過(guò)構(gòu)造一個(gè)評(píng)價(jià)函數(shù),可將多目標(biāo)優(yōu)化問(wèn)題轉(zhuǎn)化為單目標(biāo)評(píng)價(jià)函數(shù)的優(yōu)化問(wèn)題。一般通過(guò)線(xiàn)性加權(quán)法、規(guī)格化加權(quán)法、功效系數(shù)法、乘除法等方法來(lái)構(gòu)造評(píng)價(jià)函數(shù)。本文中針對(duì)上述3個(gè)目標(biāo)函數(shù),引入加權(quán)系數(shù),構(gòu)造新的優(yōu)化目標(biāo)函數(shù)為

式中:λ1,λ2,λ3均為大于零的加權(quán)系數(shù)[3]。 通過(guò)賦值給 λ1,λ2,λ3不同數(shù)值,可以實(shí)現(xiàn)單目標(biāo)、雙目標(biāo)、三目標(biāo)優(yōu)化。 例如當(dāng) λ1=1,λ2=λ3=0 時(shí),即可實(shí)現(xiàn)傳動(dòng)系統(tǒng)速比單目標(biāo)經(jīng)濟(jì)性?xún)?yōu)化。
3.4 約束條件
本文中將以最高車(chē)速、最大爬坡度、最大附著力、行駛阻力和換擋平順性為基本要素建立約束條件。
3.4.1 最大速比約束imax的確定
純電動(dòng)汽車(chē)以1擋在最大爬坡角坡道上勻速行駛時(shí),其驅(qū)動(dòng)力方程為

式中:Ft為行駛時(shí)需要的驅(qū)動(dòng)力;Tmax為驅(qū)動(dòng)電機(jī)最大轉(zhuǎn)矩;r為車(chē)輪半徑;m為滿(mǎn)載質(zhì)量。驅(qū)動(dòng)電機(jī)提供的最大轉(zhuǎn)矩經(jīng)過(guò)傳動(dòng)系統(tǒng)減速增矩后需要大于阻力轉(zhuǎn)矩,將式(11)代入式(10)可得

代入相關(guān)參數(shù)計(jì)算可得,i1ig≥8.949。
驅(qū)動(dòng)輪驅(qū)動(dòng)力不能超過(guò)地面最大附著力要求:

式中:Fz為地面對(duì)驅(qū)動(dòng)輪的法向反作用力,軸荷分配比值為55%;φ為路面附著系數(shù),取φ=0.8。計(jì)算得到,i1ig≤13.07。
綜上所述,8.949≤imax≤13.07。
3.4.2 最小速比約束imin的確定
一般最高車(chē)速對(duì)應(yīng)的驅(qū)動(dòng)電機(jī)轉(zhuǎn)速為其最高轉(zhuǎn)速nmax的90%~95%,本文中取n=0.95nmax。根據(jù)最高車(chē)速與電機(jī)轉(zhuǎn)速之間的關(guān)系可得

純電動(dòng)汽車(chē)在良好的平直道路上以最高車(chē)速vmax行駛時(shí),其驅(qū)動(dòng)力方程為

此時(shí)驅(qū)動(dòng)電機(jī)輸出的轉(zhuǎn)矩經(jīng)過(guò)傳動(dòng)系統(tǒng)減速增矩后應(yīng)大于阻力轉(zhuǎn)矩,于是有
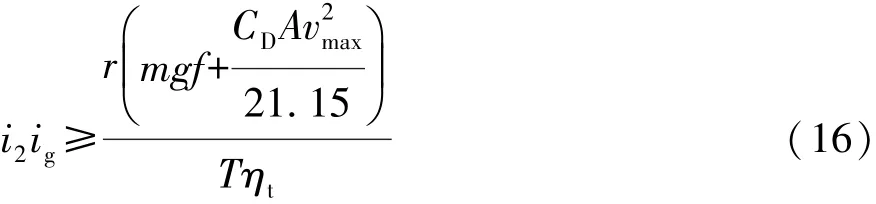
代入相關(guān)參數(shù)計(jì)算得,i2ig≥3.776。
綜上所述,3.776≤imin≤7.354。
3.4.3 換擋平順性約束
如若相鄰兩擋位的傳動(dòng)比比值過(guò)大,不僅會(huì)引起更長(zhǎng)的動(dòng)力中斷時(shí)間,影響乘坐舒適性,還會(huì)對(duì)換擋控制帶來(lái)相應(yīng)的難度。根據(jù)設(shè)計(jì)經(jīng)驗(yàn),一般取兩擋的傳動(dòng)比比值范圍為

3.5 集成優(yōu)化模型
ISIGHT作為一種智能多學(xué)科優(yōu)化軟件[18],可同其他分析軟件集成在一起解決復(fù)雜的多目標(biāo)優(yōu)化問(wèn)題。本文中采用的集成優(yōu)化流程如圖7所示。首先利用MATLAB/Simulink軟件搭建純電動(dòng)汽車(chē)傳動(dòng)系統(tǒng)速比優(yōu)化目標(biāo)函數(shù)模型;其次采用優(yōu)化軟件,通過(guò)調(diào)用在MATLAB/Simulink中所搭建的目標(biāo)函數(shù)模型進(jìn)行聯(lián)合仿真優(yōu)化。優(yōu)化算法采用ISIGHT提供的NMOPSO算法。在優(yōu)化過(guò)程中,ISIGHT自動(dòng)調(diào)用MATLAB軟件,并對(duì)MATLAB目標(biāo)函數(shù)模型中的輸入變量進(jìn)行賦值,然后由MATLAB計(jì)算純電動(dòng)汽車(chē)目標(biāo)函數(shù)值,最后判斷優(yōu)化是否迭代結(jié)束,如果達(dá)到迭代次數(shù)則優(yōu)化結(jié)束,否則繼續(xù)迭代進(jìn)行優(yōu)化過(guò)程。最終從所有計(jì)算結(jié)果中選出最優(yōu)值。
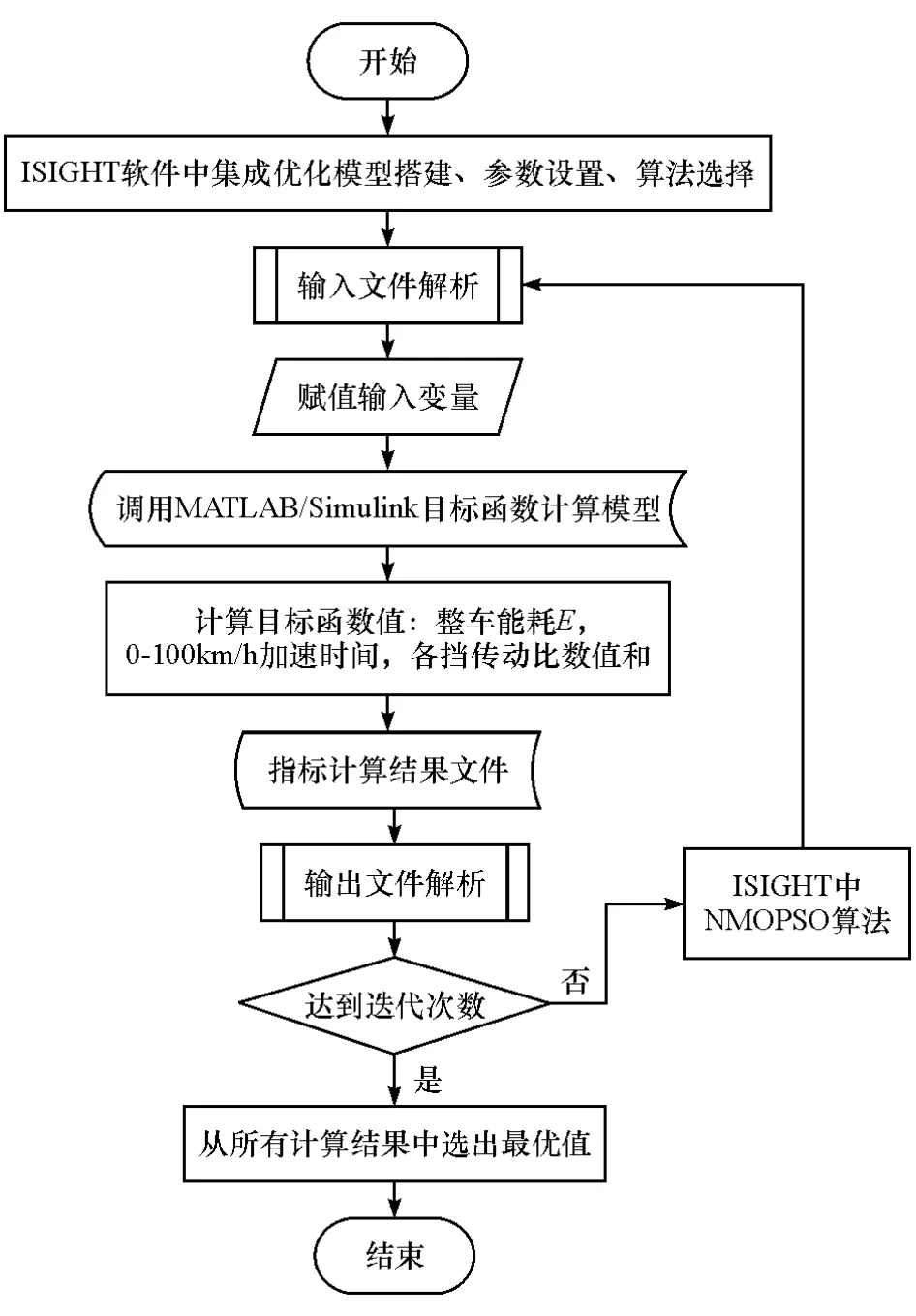
圖7 集成優(yōu)化模型計(jì)算過(guò)程
4 優(yōu)化實(shí)例與分析
本文中傳動(dòng)系統(tǒng)速比動(dòng)態(tài)仿真優(yōu)化分為3個(gè)層次:僅考慮整車(chē)經(jīng)濟(jì)性;考慮整車(chē)經(jīng)濟(jì)性和動(dòng)力性;考慮整車(chē)經(jīng)濟(jì)性、動(dòng)力性和傳動(dòng)系統(tǒng)輕量化原則。
4.1 靜態(tài)優(yōu)化思路下的優(yōu)化結(jié)果
以NEDC循環(huán)工況下整車(chē)能耗目標(biāo)函數(shù)為優(yōu)化目標(biāo),依據(jù)圖4所示兩參數(shù)靜態(tài)換擋規(guī)律并選用NMOPSO算法對(duì)傳動(dòng)系統(tǒng)速比進(jìn)行靜態(tài)優(yōu)化。靜態(tài)優(yōu)化思路下的整車(chē)能耗E變化過(guò)程如圖8所示。最終優(yōu)化結(jié)果為:最大速比 imax1=10.676、最小速比imin1=6.314時(shí),整車(chē)能耗取最小,E1=1.8268 kW·h。由此可仿真得到0-100km/h加速時(shí)間T1=8.5693s,各擋傳動(dòng)比數(shù)值總和為I1=16.990。
4.2 動(dòng)態(tài)優(yōu)化思路下的優(yōu)化結(jié)果
4.2.1 僅考慮整車(chē)經(jīng)濟(jì)性
僅考慮整車(chē)經(jīng)濟(jì)性是以NEDC循環(huán)工況下整車(chē)能耗目標(biāo)函數(shù)為優(yōu)化目標(biāo)。此時(shí)優(yōu)化目標(biāo)函數(shù)中的各個(gè)權(quán)重系數(shù)為:λ1=1,λ2=λ3=0。 整車(chē)能耗 E 優(yōu)化過(guò)程如圖9所示。最終優(yōu)化結(jié)果為:最大速比imax1=10.449、最小速比 imin1=6.366時(shí),整車(chē)能耗取最小,E1=1.8223kW·h。由此可以仿真得到0-100km/h加速時(shí)間T1=8.5868s,各擋傳動(dòng)比數(shù)值總和為 I1=16.815。
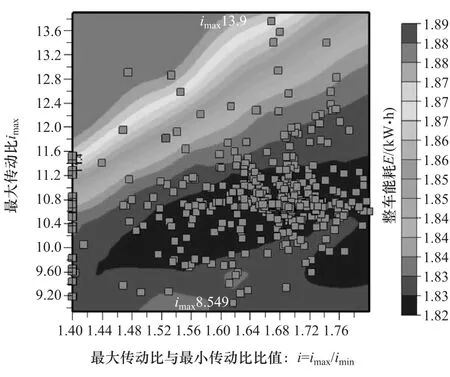
圖8 靜態(tài)優(yōu)化思路下的整車(chē)能耗E最小
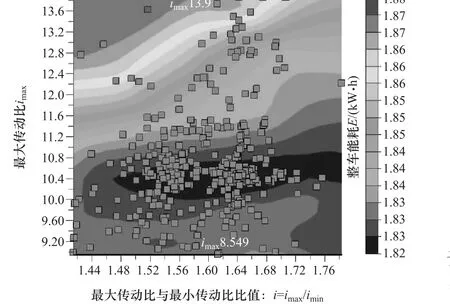
圖9 能耗E最小(經(jīng)濟(jì)性)
4.2.2 考慮整車(chē)經(jīng)濟(jì)性和動(dòng)力性
同時(shí)考慮整車(chē)經(jīng)濟(jì)性和動(dòng)力性時(shí),優(yōu)化目標(biāo)函數(shù)中的各個(gè)權(quán)重系數(shù)為:λ1和λ2為大于零的系數(shù)、λ3=0。 某組權(quán)重系數(shù) λ1=0.9,λ2=0.1 時(shí),整車(chē)能耗E與0-100km/h加速時(shí)間優(yōu)化過(guò)程如圖10和圖11所示,收斂性沒(méi)有僅考慮經(jīng)濟(jì)性目標(biāo)函數(shù)時(shí)好。最終優(yōu)化結(jié)果為:最大速比imax2=10.470,最小速比imin2=6.263時(shí),整車(chē)能耗最小,E2=1.8237kW·h,加速時(shí)間最小,T2=8.5793s。由此可以計(jì)算得出,各擋傳動(dòng)比數(shù)值總和為I2=16.733。
4.2.3 考慮整車(chē)經(jīng)濟(jì)性、動(dòng)力性和傳動(dòng)系統(tǒng)輕量化
在4.2.2節(jié)所述基礎(chǔ)上兼顧傳動(dòng)系統(tǒng)輕量化設(shè)計(jì)原則,優(yōu)化目標(biāo)函數(shù)在某組權(quán)重系數(shù)λ1=0.9,λ2=0.1,λ3=0.1時(shí),整車(chē)能耗 E,0-100km/h加速時(shí)間t100和各擋傳動(dòng)比數(shù)值與Iall優(yōu)化過(guò)程如圖12~圖14所示。
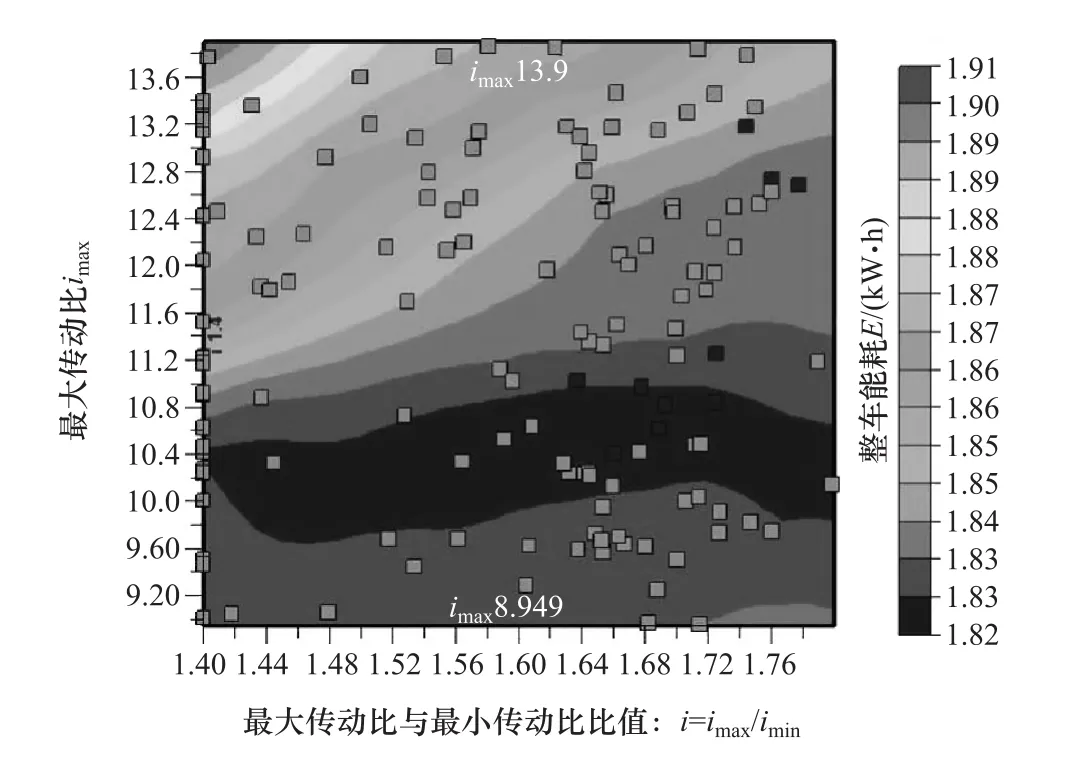
圖10 能耗E最小(動(dòng)力性和經(jīng)濟(jì)性)
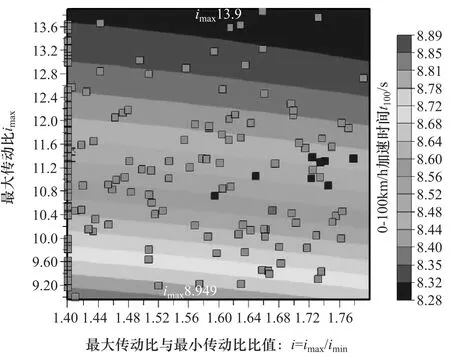
圖11 時(shí)間t100最小(動(dòng)力性和經(jīng)濟(jì)性)
從圖10與圖12對(duì)比可知,當(dāng)考慮傳動(dòng)系統(tǒng)輕量化設(shè)計(jì)原則后,圖12中的整車(chē)能耗目標(biāo)函數(shù)收斂性有所提升。最終優(yōu)化結(jié)果為:最大速比imax2=10.422、最小速比 imin2=6.254時(shí),整車(chē)能耗最小,E2=1.8234kW·h,加速時(shí)間最小,T1= 8.5855s,各擋傳動(dòng)比數(shù)值總和最小為I0=16.676。
4.3 不同優(yōu)化方案下優(yōu)化結(jié)果分析對(duì)比
綜上所述,最終基于不同優(yōu)化方案和目標(biāo)函數(shù)的優(yōu)化結(jié)果對(duì)比情況如表3所示。其中整車(chē)能耗為單NEDC工況循環(huán)下的能耗數(shù)值。表中“未考慮換擋優(yōu)化”是指在電機(jī)工作效率最優(yōu)基礎(chǔ)上確定了傳動(dòng)比,但是沒(méi)有基于變速器換擋規(guī)律對(duì)傳動(dòng)比進(jìn)行優(yōu)化條件下的數(shù)值結(jié)果;“考慮靜態(tài)換擋規(guī)律優(yōu)化”是指采用了兩參數(shù)靜態(tài)換擋規(guī)律,并選用NMOPSO算法對(duì)傳動(dòng)系統(tǒng)速比進(jìn)行優(yōu)化的結(jié)果;“動(dòng)態(tài)優(yōu)化”是指考慮了變速器換擋規(guī)律變化,并選用NMOPSO算法對(duì)傳動(dòng)系統(tǒng)速比進(jìn)行動(dòng)態(tài)優(yōu)化的結(jié)果。
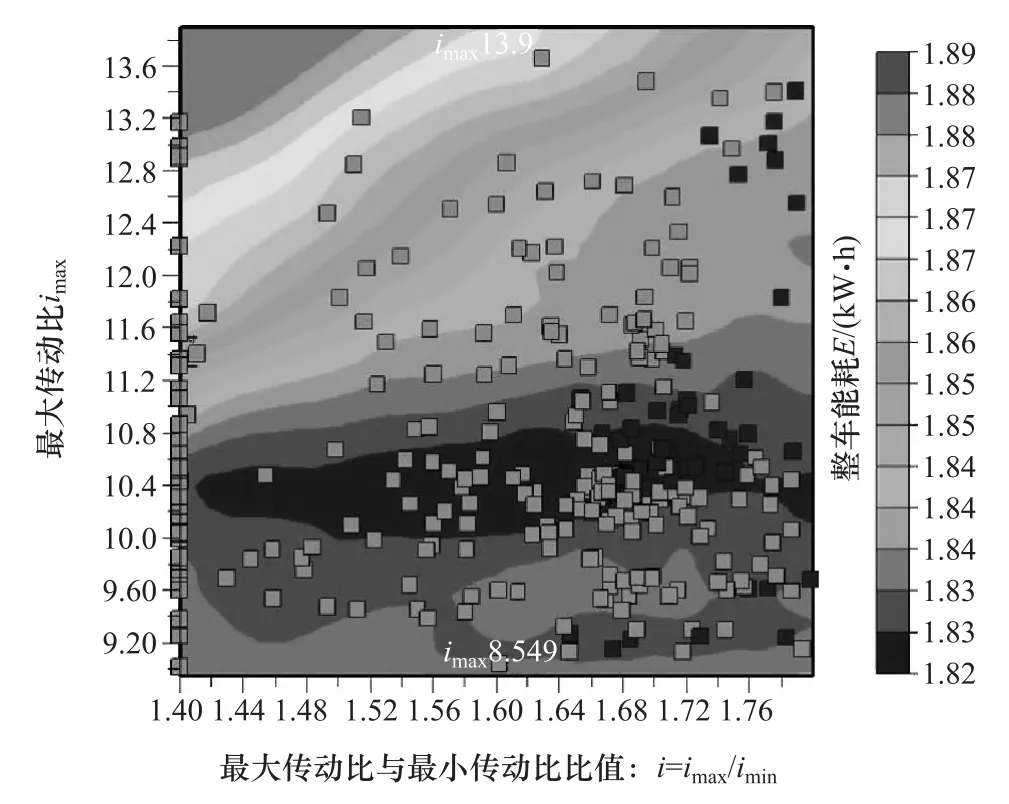
圖12 能耗E最小(經(jīng)濟(jì)性、動(dòng)力性和輕量化)
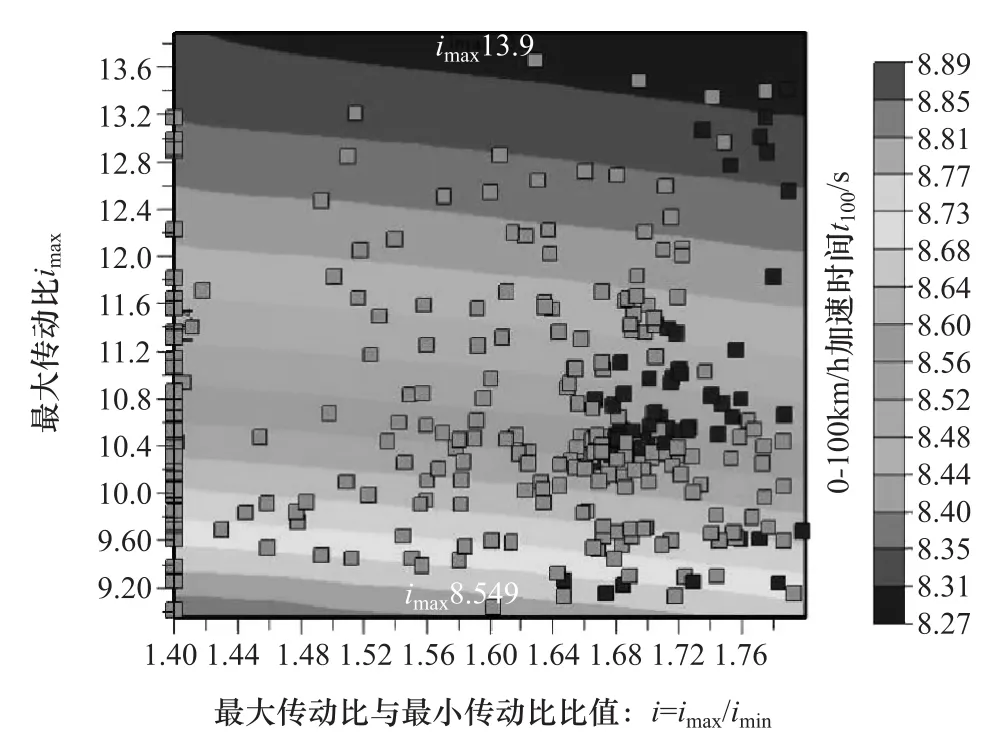
圖13 時(shí)間t100最小(經(jīng)濟(jì)性、動(dòng)力性和輕量化)

圖14 傳動(dòng)比數(shù)值I all最小(經(jīng)濟(jì)性、動(dòng)力性和輕量化)
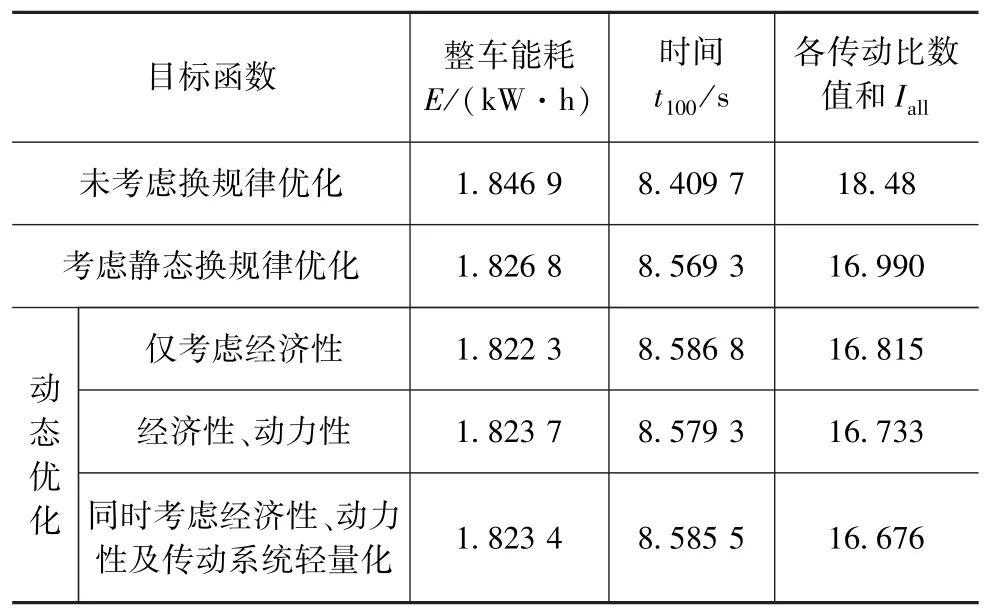
表3 不同目標(biāo)函數(shù)下優(yōu)化結(jié)果對(duì)比
由表3可見(jiàn):與未考慮換擋規(guī)律優(yōu)化相比,考慮靜態(tài)換擋規(guī)律優(yōu)化結(jié)果,整車(chē)能耗降低1.09%,0-100km/h加速時(shí)間增加了1.90%,傳動(dòng)比值總和降低了8.06%;而與未考慮換擋規(guī)律優(yōu)化相比,考慮動(dòng)態(tài)換擋規(guī)律優(yōu)化結(jié)果,僅考慮整車(chē)經(jīng)濟(jì)性時(shí),整車(chē)能耗減少了 1.33%,0-100km/h加速時(shí)間增加了2.11%,傳動(dòng)比值總和降低了9.01%;同時(shí)考慮整車(chē)經(jīng)濟(jì)性和動(dòng)力性時(shí),整車(chē)能耗減少了 1.26%,0-100km/h加速時(shí)間增加了2.02%,傳動(dòng)比值總和降低了9.45%;同時(shí)考慮3個(gè)目標(biāo)函數(shù)時(shí),整車(chē)能耗減少了1.27%,0-100km/h加速時(shí)間增加了2.09%,傳動(dòng)比值總和降低了9.76%。
5 結(jié)論
(1)在分析純電動(dòng)汽車(chē)傳動(dòng)系統(tǒng)速比靜態(tài)優(yōu)化思路的基礎(chǔ)上,本文中基于動(dòng)力性換擋點(diǎn)判斷和經(jīng)濟(jì)性換擋點(diǎn)判斷規(guī)則,提出一種考慮換擋規(guī)律變化的傳動(dòng)系統(tǒng)速比動(dòng)態(tài)優(yōu)化方法;基于“輕量化設(shè)計(jì)原則”,提出一種傳動(dòng)系統(tǒng)各速比值總和最小的目標(biāo)函數(shù),采用能避免局部收斂的小生境多目標(biāo)粒子群算法對(duì)上述目標(biāo)函數(shù)進(jìn)行ISIGHT-MATLAB/Simulink聯(lián)合仿真優(yōu)化。
(2)文中考慮換擋規(guī)律的優(yōu)化(包括靜態(tài)和動(dòng)態(tài))都取得一定的效果:與未考慮換擋規(guī)律的優(yōu)化相比,在不同情況下,整車(chē)能耗減少了 1.09%~1.33%,傳動(dòng)比值總和降低了8.06%~9.76%;但0-100km/h加速時(shí)間增加了1.90%~2.11%,可能與優(yōu)化目標(biāo)函數(shù)的加權(quán)仍偏重于經(jīng)濟(jì)性有關(guān)。
(3)與考慮靜態(tài)換擋規(guī)律優(yōu)化相比,考慮動(dòng)態(tài)換擋規(guī)律優(yōu)化的結(jié)果,傳動(dòng)比值總和的降幅增加了0.95%~1.70%,但整車(chē)能耗與考慮靜態(tài)換擋規(guī)律優(yōu)化結(jié)果基本持平,未顯示出針對(duì)不同傳動(dòng)比采用不同換擋規(guī)律進(jìn)行優(yōu)化的預(yù)期效果,其原因尚待今后進(jìn)一步深入探究。
(4)本文中提出的方法采用兩參數(shù)換擋規(guī)律,設(shè)計(jì)的目標(biāo)函數(shù)也未能全面涉及電傳動(dòng)系統(tǒng)的諸多性能,在目標(biāo)函數(shù)建立的完備性和小生境多目標(biāo)粒子群算法的全局性?xún)?yōu)化方面還有待于做更進(jìn)一步的深入研究以期達(dá)到更好的優(yōu)化效果。
[1] 郭孔輝,姜輝,張建偉.電動(dòng)汽車(chē)傳動(dòng)系統(tǒng)的匹配及優(yōu)化[J].科學(xué)技術(shù)與工程,2010,10(16):3892-3896.
[2] WALKER PD,RAHMAN SA,ZHU B,etal.Modelling,simulations,and optimization of electric vehicles for analysis of transmission ratio selection[J].Advances in Mechanical Engineering,2013(5):1-7.
[3] 周兵,江清華,楊易.兩擋變速器純電動(dòng)汽車(chē)動(dòng)力性經(jīng)濟(jì)性雙目標(biāo)的傳動(dòng)比優(yōu)化[J].汽車(chē)工程,2011,33(9):792-797,828.
[4] 胡明輝,謝紅軍,秦大同.電動(dòng)汽車(chē)電機(jī)與傳動(dòng)系統(tǒng)參數(shù)匹配方法的研究[J].汽車(chē)工程,2013,35(12):1068-1073.
[5] MOROZOV A,HUMPHRIESK,ZOU T,et al.Design and optimization of a drivetrain with two-speed transmission for electric delivery step van[C].IEEE Electric Vehicle Conference,F(xiàn)lorence.2014:1-8.
[6] SORNIOTTIA,SUBRAMANYAN S,TURNER A,etal.Selection of the optimal gearbox layout for an electric vehicle[J].Sae International Journal of Engines,2011,4(1):1267-1280.
[7] 張抗抗,徐梁飛,華劍鋒,等.基于多目標(biāo)優(yōu)化的純電動(dòng)車(chē)動(dòng)力系統(tǒng)參數(shù)匹配方法[J].汽車(chē)工程,2015,37(7):757-765.
[8] 趙韓,馮永愷,黃康.純電動(dòng)汽車(chē)變速器傳動(dòng)比區(qū)間優(yōu)化[J].中國(guó)機(jī)械工程,2015,26(5):698-703,709.
[9] 陳奇,馮永愷,楊昊仁,等.純電動(dòng)汽車(chē)用自動(dòng)變速器傳動(dòng)參數(shù)優(yōu)化與仿真[J].機(jī)械傳動(dòng),2013,37(6):53-57.
[10] 吳鑫平.純電動(dòng)汽車(chē)用電機(jī)—變速器一體化系統(tǒng)設(shè)計(jì)及其控制策略研究[D].合肥:合肥工業(yè)大學(xué),2015.
[11] PAKNIYAT A,CAINES P E.The gear selection problem for electric vehicles:An optimal control formulation[C].IEEE International Conference on Control Automation Robotics& Vision,Singapore,2014:1261-1266.
[12] 陳淑江,秦大同,胡明輝,等.兼顧動(dòng)力性與經(jīng)濟(jì)性的純電動(dòng)汽車(chē)AMT綜合換擋策略[J].中國(guó)機(jī)械工程,2013,24(19):2687-2692.
[13] 黃康,郜欣欣.基于行駛工況的純電動(dòng)汽車(chē)傳動(dòng)比區(qū)間優(yōu)化[J].合肥工業(yè)大學(xué)學(xué)報(bào)(自然科學(xué)版),2016,39(3):289-295.
[14] 張炳力,趙坤,周德明,等.基于效率最優(yōu)的電機(jī) 變速器一體化優(yōu)化匹配[J].合肥工業(yè)大學(xué)學(xué)報(bào)(自然科學(xué)版),2015,38(6):721-725,821.
[15] KENNEDY J,EBERHART R.Particle swarm optimization[C].Proceedings of the Fourth IEEE International Conference on Neural Networks.Perth, Australia,1995:1942-1948.
[16] 吳一全,吳詩(shī)婳,張宇飛.基于混沌粒子群優(yōu)化的Contourlet域紅外圖像自適應(yīng)增強(qiáng)[J].吉林大學(xué)學(xué)報(bào)(工學(xué)版),2014,44(5):1466-1473.
[17] 劉文穎,謝昶,文晶,等.基于小生境多目標(biāo)粒子群算法的輸電網(wǎng)檢修計(jì)劃優(yōu)化[J].中國(guó)電機(jī)工程學(xué)報(bào),2013,33(4):141-148,19.
[18] 尹安東,趙韓,楊亞娟,等.多目標(biāo)遺傳算法的混合動(dòng)力傳動(dòng)系參數(shù)優(yōu)化[J].中國(guó)機(jī)械工程,2013,24(4):552-556.
Dynamic Optimization Method for Speed Ratio of Electric Vehicle's Transmission System Based on NMOPSO Algorithm
Song Qiang,Ye Shanding,Gao Peng& Li Yiting
1.School ofMechanical Engineering, Beijing Institute of Technology, Beijing 100081;2.Beijing Co-Innovation Center for Electric Vehicles,Beijing 100081
In order to achieve the best vehicle economy performance,on the basis of static optimization on the speed ratio of transmission in a pure electric vehicle and in view of its defect ofwithout adopting corresponding gear-shift schedules for different speed ratio,a dynamic optimization scheme on transmission speed ratiowith consideration of changing gear-shift schedules is proposed based on shifting point judgment rule.An objective function of minimizing the sum of all speed ratios of transmission is also put forward based on lightweight design principle.Then an ISIGHT-MATLAB/Simulink co-simulation is conducted on objective functions by adopting niche multi-objective particle swarm optimization(NMOPSO)algorithm,which can avoid local convergence.The results of optimizations(both static and dynamic)achieve certain effects:compared with the optimization without considering gear-shift schedules,the energy consumption of vehicle reduces by 1.09% ~1.35%,the sum of speed ratios lowers by 8.06%~9.76%,but 0-100km/h acceleration time increases by 1.90%~2.11%,probably because the weighting of objective function still preferring on fuel economy.Compared with the optimization considering static gear-shift schedules, with dynamic optimization, the reduction percentage of the sum of speed ratios increases by 0.95%~1.7%,but the energy consumption of vehicle is basicallymaintained the same as thatwith static optimization,not showing the expected effects of adopting different gear-shift schedules for different speed ratios in optimization.This requests further in-depth exploration in subsequent research.
electric vehicles; dynam ic optim ization for speed ratio; niche m ulti-objective particle swarm optim ization;lightweight design of transm ission
10.19562/j.chinasae.qcgc.2017.10.012
?國(guó)家國(guó)際科技合作專(zhuān)項(xiàng)(2014DFG70840)資助。
原稿收到日期為2016年7月6日,修改稿收到日期為2016年12月20日。
宋強(qiáng),博士,副教授,E-mail:songqiang@ bit.edu.cn。
猜你喜歡
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
房地產(chǎn)導(dǎo)刊(2022年4期)2022-04-19 09:04:10
汽車(chē)工程師(2021年12期)2022-01-17 02:29:58
汽車(chē)工程師(2021年11期)2021-12-21 06:23:12
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2021年12期)2021-03-08 01:28:50
四川電力技術(shù)(2015年5期)2015-12-19 11:04:54
減速頂與調(diào)速技術(shù)(2015年4期)2015-03-16 03:39:41
