計及傳動系齒隙與彈性的電動汽車防抱死制動控制?
2017-11-08 02:01:10張仲石王麗芳張俊智馬瑞海
汽車工程 2017年10期
張仲石,王麗芳,張俊智,馬瑞海
(1.中國科學院電工研究所,北京 100190; 2.中國科學院大學,北京 100049;3.清華大學,汽車安全與節能國家重點實驗室,北京 100084)
計及傳動系齒隙與彈性的電動汽車防抱死制動控制?
張仲石1,2,王麗芳1,張俊智3,馬瑞海1,2
(1.中國科學院電工研究所,北京 100190; 2.中國科學院大學,北京 100049;3.清華大學,汽車安全與節能國家重點實驗室,北京 100084)
考慮了傳動系彈性和齒隙非線性等因素,建立電動汽車的動力總成和液壓制動系統模型,分析了傳動系特性對電動防抱死制動性能和駕駛舒適性的影響。為改善電動汽車電動防抱死制動效果,提出了傳動系特性補償控制策略,包括齒隙轉速差的滑模控制和半軸轉矩PID控制,以消除齒隙和傳動系彈性的負面影響。通過仿真對比該策略與未補償傳動系特性時電動防抱死制動和傳統液壓防抱死制動的控制效果,結果表明,所提出的控制方法增強了電動汽車防抱死制動性能,提升了駕駛操縱性與舒適性。
電動汽車;傳動系;齒隙;半軸彈性;回饋制動;防抱死制動
前言
在電動汽車行駛工況中,不僅可通過電機回饋制動功能將部分車輛動能轉化為電能以提升整車能量經濟性,還可以利用電機轉矩控制快速準確的特性進行緊急工況下車輛防抱死制動以提升制動效果。正常制動工況下電機回饋制動方案得到深入研究[1-2],并已在量產車型中得到應用[3];但關于電機參與防抱死制動的研究不多[4-5]。尤其當考慮傳動系的影響時,回饋制動轉矩經過傳遞后特性發生改變,傳動系彈性和齒隙的非線性引起轉矩波動,最終導致制動性能和駕駛舒適性的惡化[6]。
為充分利用電機轉矩進行電動汽車防抱死制動,必須消除傳動系特性的負面影響。其一,傳動系齒隙指減速機構齒輪間的嚙合間隙[7],導致回饋轉矩精確控制中不可忽視的非線性;其二,傳動系彈性主要體現在半軸傳動環節[8],引起轉矩在傳遞前后幅值和相位的改變。當車輛由驅動轉為制動時,傳動系中齒輪接觸面反向,轉過齒隙引起接觸時的沖擊,再經過半軸的影響導致車輪處轉矩的振蕩。文獻[9]中針對內燃機汽車提出了傳動系特性補償方法,由于電動汽車電機轉矩響應更快,且回饋轉矩與摩擦制動轉矩存在耦合,導致控制更加復雜。文獻[6]和文獻[10]中分別針對驅動及制動工況下傳動系彈性,提出振動抑制方法和差速制動法以改善車輛操縱性和舒適性;文獻[11]中考慮傳動系的齒隙和彈性特征,提出模式切換控制以減小傳動系對回饋制動性能的負面影響。上述文獻中只研究了電動汽車的正常行駛工況,對于電機參與防抱死制動時傳動系特性的補償亟需深入研究。
本文中研究緊急制動工況下電機回饋制動與液壓摩擦制動的協調控制,通過補償傳動系齒隙和彈性提升制動性能與駕駛舒適性。建立前驅電動汽車動力總成與液壓制動系統模型,分析傳動系特性對電機轉矩傳遞效果的影響;提出齒隙滑模控制與半軸轉矩反饋PID控制相結合的控制策略,完成電動防抱死制動設計;最后進行不同路面下的仿真分析,對比仿真結果驗證策略的有效性。
1 系統模型
研究對象為前軸單電機驅動電動汽車,電機轉矩經傳動系分配至左前輪和右前輪。該車的復合制動系統結構如圖1所示,電機回饋制動力與液壓摩擦制動力共同作用在前輪,后輪由液壓力實現制動,其中液壓轉矩的調節裝置為液壓閥。圖1中還畫出了動力總成的簡化模型,表征電機驅制動轉矩的傳遞過程,將傳動系各組齒輪接觸間隙簡化為單個齒隙,大小取為2α。電機轉矩由減/差速器和齒隙傳遞至半軸,再經半軸和萬向節作用于車輪上。假設車輛保持直線行駛,電機轉矩平分至左右兩側車輪,以下只考慮左側車身和車輪的縱向受力與運動;且假設傳動系彈性體現在半軸上。

圖1 復合制動系統示意圖和動力總成模型
電機制動時,其輸出端至差速器的動力學方程為

式中:Tm為電機實際轉矩,N·m;Ths為一側的半軸轉矩;i=ig·i0,為總傳動速比;θm為電機輸出軸轉角,rad;為電機至半軸的等效轉動慣量,kg·m2,表示為

式中:Jm,J1,J2,J3和 Jhs分別為電機、減速器輸入軸與齒輪、減速器中間軸與齒輪、減速器輸出軸與齒輪和半軸的轉動慣量。半軸轉矩Ths為

式中:β為半軸扭轉阻尼系數,N·m·s/rad;k為半軸扭轉剛度,N·m/rad;θ1為半軸前端轉角(見圖1);θw為前輪轉角。當齒隙兩側齒輪處于接觸狀態時,齒隙轉角 θb=θm/i-θ1的大小為±α;當齒隙兩側未接觸時,-α<θb<α,此時電機轉矩無法傳遞至半軸,電機與車輪處于解耦狀態,忽略Jhs則有:Ths=β(˙θm/i-˙θb-˙θw)+k(θm/i-θb-θw)=0。故˙θb可表示為[12]
最終作用在左前輪的電機制動轉矩Tw為

規定電機提供驅動轉矩時為正方向,回饋制動轉矩則為負值。不考慮道路坡度,正常制動時左前輪和左側車身的動力學方程為
式中:Th,f,Th,r分別為前輪和后輪液壓摩擦制動轉矩;Fx為前輪地面縱向力,N;r為車輪有效半徑,m;f為車輪滾阻系數;Fz,f,Fz,r分別為前輪及后輪的法向載荷;Jw為車輪轉動慣量;Fair為整車空氣阻力;m為整車質量,kg;a為整車縱向加速度,m/s2。
當車輛制動時,若道路附著不足或制動力過大車輪將要發生滑移甚至抱死,Fx可表示為

式中μ=f(λ)為輪胎與路面間的縱向附著系數,是前輪滑移率λ的函數,二者在不同路面上的對應關系如圖2所示。
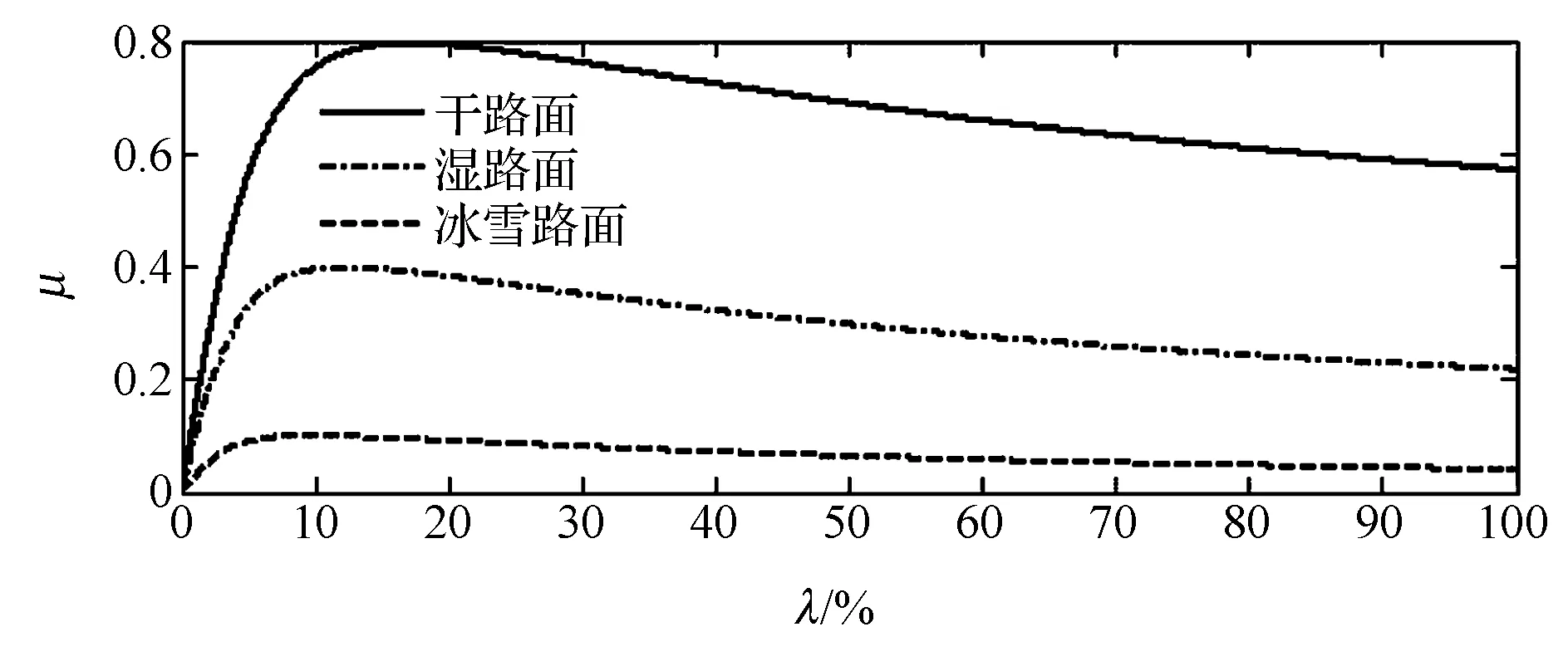
圖2 路面附著系數μ與車輪滑移率λ的關系曲線
輪胎模型采用Pacejka魔術公式[13],能模擬輪胎縱向真實的附著與滑移情況。電機采用永磁同步電機,將其轉矩響應簡化為1階環節,時間常數為τm,轉矩命令值為 Tm,ref,則有

在文獻[14]中的8自由度車輛模型基礎上進行簡化,得到1/2車身縱向動力學模型。同時,為模擬實車液壓制動力特性,建立了液壓制動系統模型[15],包括液壓閥動態模型和車輪制動壓力模型;其中前后輪液壓制動力大小按固定比例分配。表1列出了整車與電機的主要參數。
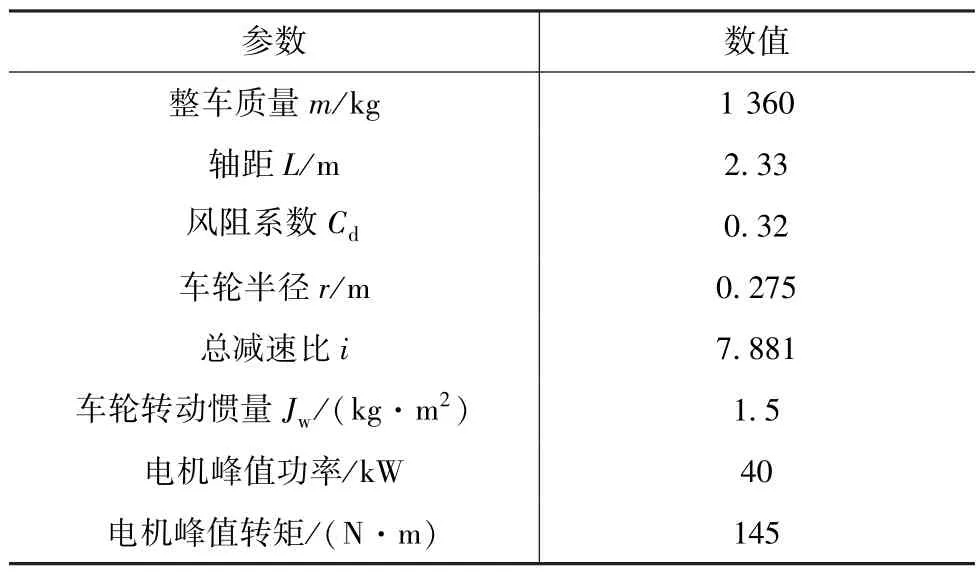
表1 主要車輛參數
2 傳動系特性分析
2.1 齒隙特性分析
電動汽車的電機在驅動時傳動系齒輪間接觸為正向,回饋制動時為反向。一旦車輛從驅動狀態切換為回饋制動時,齒輪過齒隙,齒隙狀態從正向接觸過渡至負向,轉角從α變為-α,激發了系統非線性。在轉過齒隙時,記半軸轉角為θhs=θ1-θw,忽略車輪滾動阻力,系統的狀態空間方程為
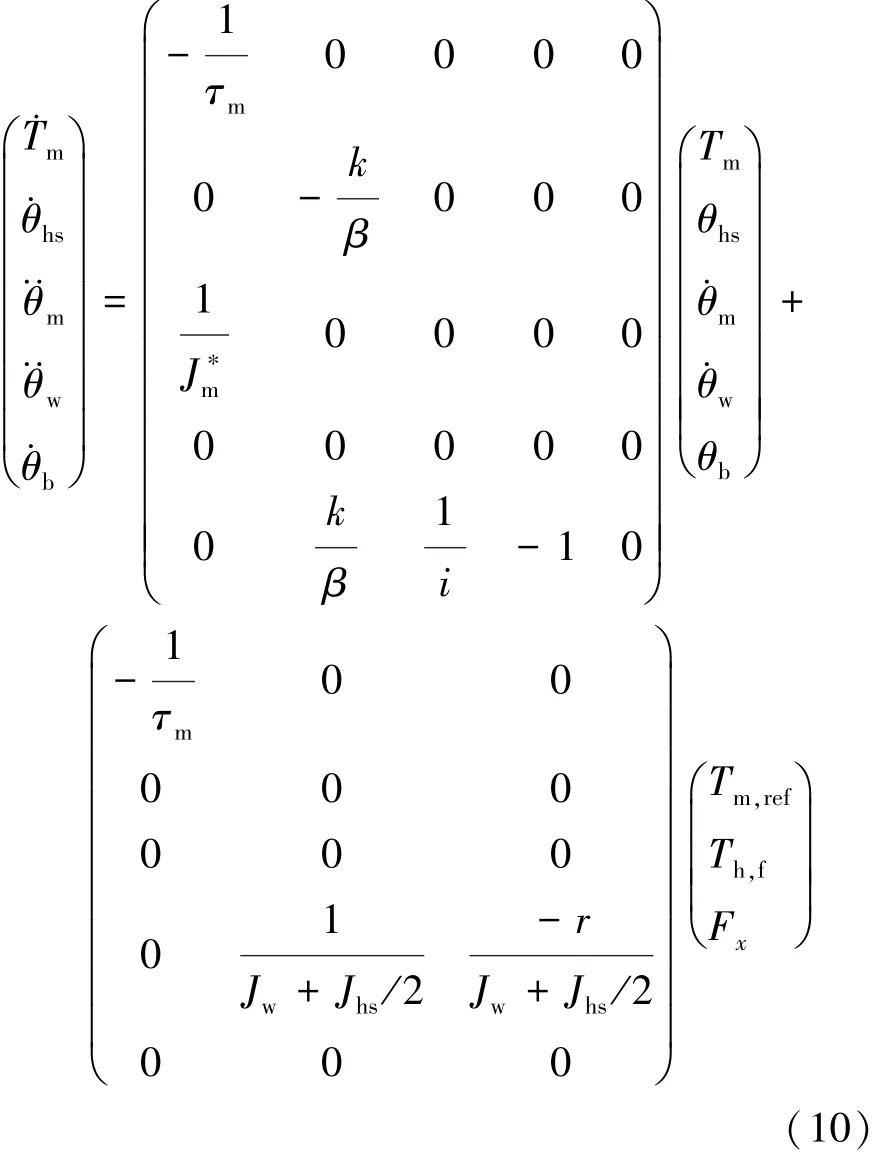
由式(10)可知,轉過齒隙時電機轉矩暫時不能傳遞至半軸,電機與車輪處于解耦狀態,其轉矩全部作用在等效轉動慣量上,式(1)變為:Tm=電機轉速變化劇烈,使負向接觸瞬間電機與車輪的轉速差Δω=ωm/i-ωw變大引起沖擊,半軸轉矩因此產生振蕩。最終導致制動時車身縱向加速度波動,影響駕駛舒適性。有必要通過主動控制對齒隙特性進行補償以改善整車制動性能。
2.2 半軸特性分析
電動汽車回饋制動力通常為開環控制,傳動系被簡化成剛性,視兩側半軸轉矩為電機輸出轉矩與傳動比的乘積[14-16];但在采用電動防抱死制動時不能忽略實際車輛傳動系非剛性的影響。對前置前驅車輛來說,傳動系彈性主要體現在半軸環節,該特性對整個驅制動過程都有影響。當齒隙兩側的齒輪從正向接觸切換至負向時,接觸的沖擊力引起半軸轉矩波動;半軸彈性和阻尼會改變轉矩傳遞前后的幅值和相位,尤其當利用電機實現防抱死制動轉矩的動態調節時,半軸特性導致制動效果惡化。從頻域上分析半軸特性對回饋制動轉矩的影響,當齒輪負向接觸后,通過式(1),式(3),式(5),式(6)和式(7)推導電機轉矩Tm至車輪處Tw的傳遞函數:


圖3 半軸特性對電機轉矩傳遞的影響
在3Hz以下的低頻范圍內,傳動系近似為剛性(β0=+∞);當電機轉矩輸出頻率增加至一定量時出現共振點(β3對應8.4Hz),且隨著半軸扭轉阻尼的減小(β0>β1>β2>β3),共振頻率、共振峰值和相位滯后均相應增大。當頻率超過10Hz后,幅值增量從0逐漸變為-20dB,相位則逐漸收斂于-90°,充分反映了半軸的彈性與阻尼特征。在電機參與防抱死制動的動態過程中,其轉矩調節頻率高,必須通過主動控制來補償半軸特性對轉矩傳遞的負面影響。
3 防抱死控制策略
為增強電機參與電動汽車防抱死制動時的制動效果,提升車輛操縱性和舒適性,設計了能補償傳動系彈性和齒隙特性的電機制動力——液壓制動力協調控制方法。在車輛由驅動轉為制動時,實時觀測齒隙轉角θb,判斷齒輪接觸狀態[12]。當開始轉過齒隙時(-α<θb<α)切換至齒隙補償控制;當齒輪重新接觸后(θb=-α),隨著制動踏板行程的增加判斷是否進入防抱死制動工況,同時切換至半軸補償控制。在齒隙補償與半軸補償兩種模式下,控制策略根據被控量的誤差生成電機回饋制動轉矩與液壓摩擦制動轉矩命令,通過電制動與摩擦制動系統的動態配合實現電動汽車緊急制動工況下快速平穩的制動。
3.1 齒隙補償策略
齒隙補償控制目標為:當車輛由驅動轉為制動時,盡可能減小齒隙前后的齒輪在重新接觸瞬間的轉速差,從而減小接觸沖擊力;同時關注轉過齒隙所用的時長,以免用時過長影響回饋制動轉矩動態響應。由于滑模控制能處理系統非線性且響應快速,可用它來實現齒隙補償。將轉速差Δω重新記為

記滑模面S為

式中ε>0,為滿足 Hurwitz條件的常數。定義 Lyapunov函數為

由于在轉過齒隙的過程中Tm=Jm·ω˙m,則有

為保證系統穩定性條件V·=SS·≤0成立,設計了滑模控制律:

式中常數η>0,sgn(S)為S的符號函數。從而有

實際應用中,將sgn(S)替換為飽和函數sat(S)可減小滑模控制量Tm的抖振。另外,液壓制動力的變化對齒隙補償效果有著不可忽視的影響:在轉過齒隙的過程中,若液壓制動力減小,齒輪重新接觸時的轉速差隨之增大,加劇了齒隙補償的難度;若液壓制動力增加,轉速差雖有減小趨勢,但延長了轉過齒隙的用時,甚至可能使齒隙兩側的齒輪在正向重新接觸。為避免液壓制動系統對齒隙補償控制的干擾,當轉過齒隙時,保持前輪液壓力不變:

3.2 半軸補償策略
當齒隙兩側的齒輪重新接觸后,即由齒隙補償切換至半軸補償控制,目的是使由電機通過傳動系傳遞至前軸兩側車輪處的總回饋制動轉矩2Tw準確跟隨由滑移率控制模塊輸出的電機轉矩參考值Tm,ref,abs與傳動比i的乘積。 由于實車上半軸轉矩難以測量,可利用卡爾曼濾波器等觀測方法對Ths進行在線估計[15]。防抱死制動中采用雙閉環反饋法控制電機轉矩:外環利用PID法控制前輪滑移率[17],將當前路面車輪的目標滑移率λref與實際滑移率λact的差值作為輸入,經過模塊 K(s)PID,ABS輸出電機轉矩命令值 Tm,ref,abs;內環同樣利用 PID 法對半軸轉矩進行補償,將 Tm,ref,abs與 2Tw/i的差值作為輸入,經過模塊K(s)PID,hs輸出補償后電機轉矩最終的命令值Tm,ref。當電機不足以提供足夠的制動轉矩時,路面附著估計模塊求出路面能給前軸兩個車輪的最大制動力,再根據當前電機能提供的最大制動轉矩Tm,max得到前軸液壓制動轉矩參考值 Th,ref,abs。 該值的選取原則為[18]:當液壓制動系統單獨制動時,車輪滑移率小于λref,處于穩定區間;在此基礎上疊加電機制動力后,電機轉矩的有效范圍可覆蓋車輪目標滑移率的調節區間,使實際滑移率快速跟隨目標值。另外,車輛防抱死制動工況后軸液壓力的調節仍按照液壓制動系統經典的邏輯門限值策略執行[19]。半軸特性補償下的電動汽車防抱死制動控制框圖見圖4。
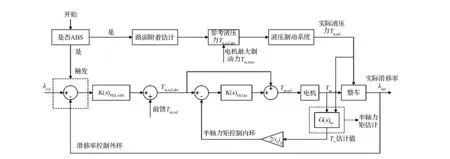
圖4 含半軸補償的電機防抱死制動控制框圖
4 仿真分析
在MATLAB/Simulink環境下,使用所建立模型對基于傳動系特性的電動汽車防抱死制動控制方法進行仿真。假設車輛行駛在無坡路上,選取低附、高附和對接路面3種典型路面。在緊急制動開始前,駕駛員操縱加速踏板驅動車輛;開始時,駕駛員快速釋放加速踏板同時快速深踩制動踏板以觸發防抱死控制。為對比驗證所提出的防抱死制動方法的有效性,設計了未考慮齒隙和半軸特性的電動防抱死制動方法:忽略齒隙補償滑模控制和半軸轉矩控制內環,只保留滑移率控制外環,將 Tm,ref,abs直接作為最終的電機轉矩命令值;液壓制動力控制策略不變。
4.1 仿真結果
當車輛行駛在低附路面(峰值附著系數為0.2)時,傳動系特性未補償與補償時的防抱死制動仿真結果如圖5和圖6所示。選取車輛制動初始速度為35km/h,得到車身縱向加速度、車速、前輪輪速、前軸液壓力矩、電機轉矩和齒隙兩側轉速差隨時間的變化曲線。由于車輛在該路面制動時電機能提供足夠的制動力,觸發防抱死制動后液壓制動力被迅速置零;當車速降至8km/h以下電機難以提供穩定的回饋轉矩時,將電機制動力迅速置零,同時恢復前輪輪缸液壓力使車輛抱死拖滑直至停車。對比圖5和圖6可知,未補償傳動系特性時轉速差達到±3rad/s,電機制動轉矩振蕩幅度大,導致輪速與車身加速度的持續波動,影響行駛舒適性;加入補償控制后,齒隙補償策略在轉過齒隙時減小電機轉矩幅值,充分抑制了轉速差,同時半軸補償策略增強了系統穩定性,電機制動力調節迅速,使前輪滑移率快速穩定在目標值,車身加速度幾乎無波動。從圖6中補償后的齒隙轉角曲線看出,制動開始后齒隙從0.03rad變為-0.03rad,電機由驅動車輪轉為制動;當撤出電機制動力后齒隙反向,車輪側的液壓力為電機側的慣量提供制動力。

圖5 未補償傳動系特性的低附路面防抱死制動結果
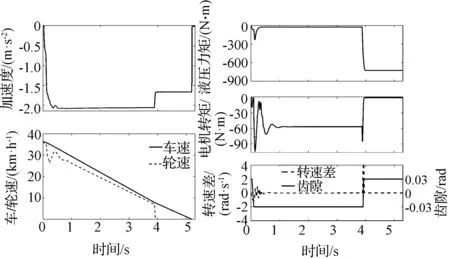
圖6 補償傳動系特性的低附路面防抱死制動結果
當車輛行駛在高附路面(峰值附著系數為0.8)時,傳動系特性未補償與補償時的防抱死制動仿真結果如圖7和圖8所示。選取車輛制動初始速度為60km/h。由于車輛在高附路面緊急制動時電機無法單獨提供足夠的轉矩,需計算得到基礎液壓制動力。對比圖7和圖8可知,補償后控制效果與低附路面相似,轉速差大幅衰減,電機轉矩調節效果明顯,有效抑制了輪速和車身加速度的波動。
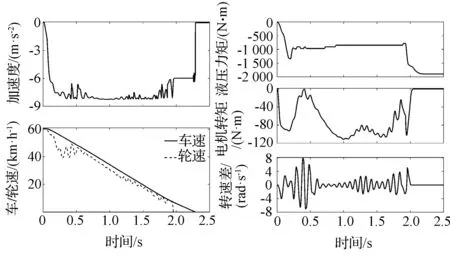
圖7 未補償傳動系特性的高附路面防抱死制動結果
當車輛行駛在對接路面(峰值附著系數由0.8突變為0.4)時,傳動系特性未補償與補償時的防抱死制動仿真結果如圖9和圖10所示。選取車輛制動初始速度為80km/h。當車輛由高附路面駛入低附路面時,路面附著估計模塊修正基礎液壓制動力,以保證電機轉矩范圍對前輪滑移率的有效調節。對比圖9和圖10可知,補償后控制效果與單一附著路面相似,齒輪重新接觸后的轉速差、輪速波動與車身加速度的波動得到大幅抑制。從圖10中轉速差曲線看出,由于車輛行駛至路面切換處時液壓制動力的調節有一定的滯后,干擾了電機制動力的控制,導致齒隙出現正負向反復接觸,轉速差波動增大;同時從車身加速度曲線看出,路面切換0.7s后方才達到目標滑移率對應的路面制動減速度,也是因為液壓制動系統響應滯后導致電機在回饋制動的象限內難以實現理想的滑移率控制效果。

圖8 補償傳動系特性的高附路面防抱死制動結果
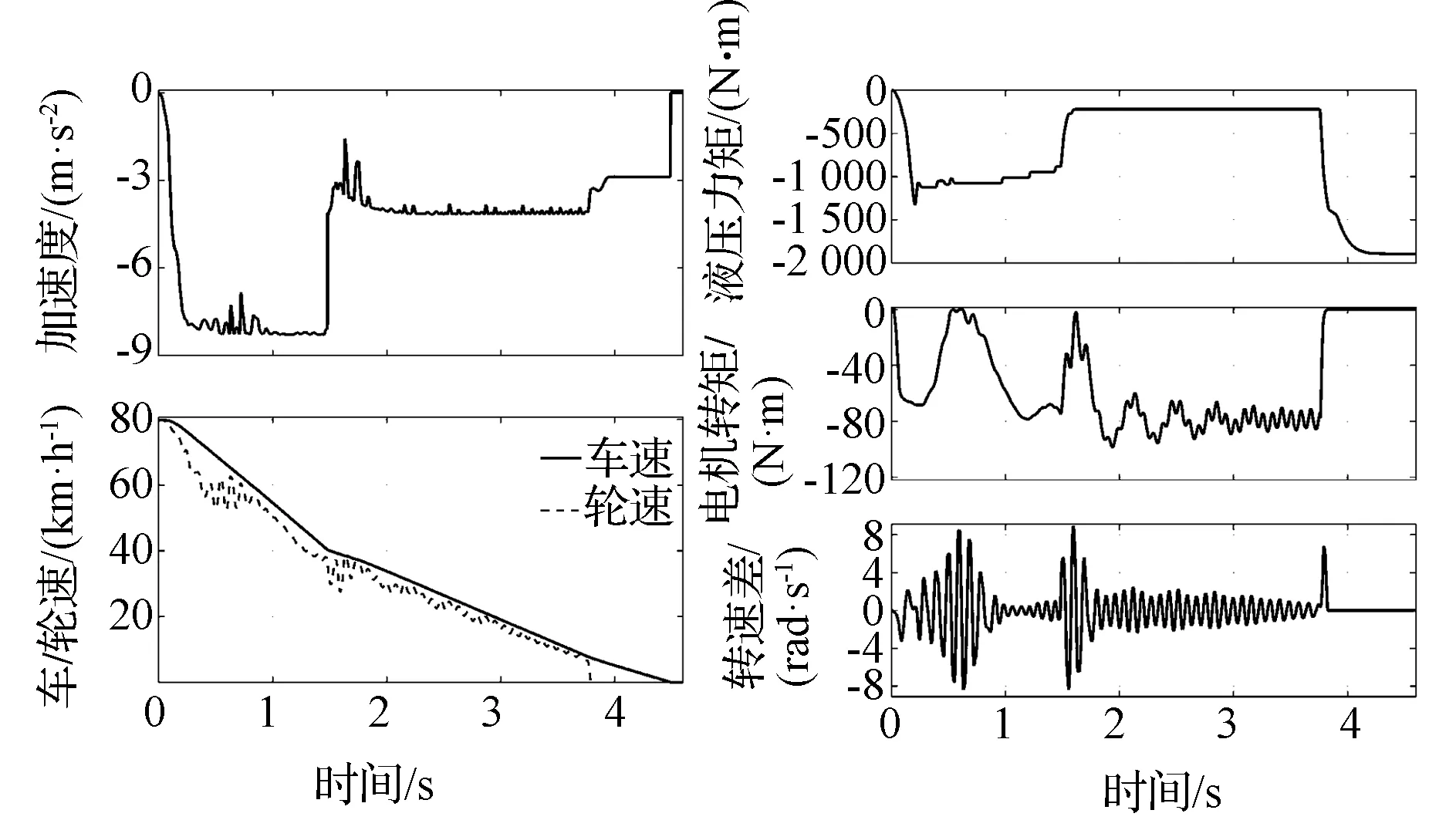
圖9 未補償傳動系特性的對接路面防抱死制動結果
4.2 對比分析
為進一步驗證所提出補償策略的有效性,表2對比了傳動系特性補償前后車輛防抱死制動效果,用量化指標突出仿真結果的差異,并加入傳統車輛采用邏輯門限法進行液壓防抱死制動的仿真結果。其中,若車身縱向加速度的導數,即沖擊度jerk幅值過大,會使車輛操縱性能惡化并導致乘客產生不適感,將車輛操縱性和舒適性用jerk在制動過程內的均方根RMS表征,即
式中[t1,t2]為所選取的時間區間。

表2 防抱死制動效果對比
由表2看出,與只采用液壓力完成制動相比,3種路面下電機參與防抱死制動補償控制時的制動距離分別縮短8.4%,8.3%,7.1%,制動性與安全性得到提升,體現了電機作為執行機構時轉矩響應快速準確的優勢。由于液壓制動力調節的邏輯門限值策略存在增減保壓特性,作用于4個車輪的液壓摩擦轉矩在防抱死制動時呈現周期波動,jerk的幅值遠大于電機制動的情形。與未補償傳動系特性的電動防抱死制動相比,補償控制時轉過齒隙所用時間雖略有增加,但對轉矩動態響應影響很小;最為關鍵的是,jerk的均方根顯著降低,3種路面下分別減小36.9%,70.5%,47.0%,制動強度越大時改善效果越明顯。說明補償后基本消除了傳動系齒隙與彈性的影響,前輪電機回饋轉矩得到準確控制,制動過程更平順,駕駛操縱性與乘客舒適度大幅提升。
5 結論
在電機參與電動汽車防抱死制動時,傳動系齒隙和彈性特征影響電機轉矩傳遞性能,易引起轉矩波動,惡化了駕駛操縱性和舒適性。本文中建立了電機制動與液壓制動模型,在分析齒隙和半軸彈性對電機轉矩影響的基礎上,設計了包括齒隙轉速差滑模控制和半軸轉矩PID閉環控制在內的傳動系特性主動補償策略以改善轉矩控制效果和制動舒適性。不同附著路面下的仿真結果顯示,補償后電機轉矩控制更精確,車身jerk的幅值更低,提升了電動防抱死制動性能。下一步工作將深入研究傳動系齒隙轉角的在線觀測和提升對接路面下防抱死制動性能的方法,并對電動防抱死制動策略進行試驗驗證。
[1] LV C, ZHANG J, LIY, et al.Hardware-in-the-loop simulation of pressure-difference-limiting modulation of the hydraulic brake for regenerative braking control of electric vehicles[J].Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering,2014,228(6):649-662.
[2] 宋士剛,李小平,孫澤昌.基于混合系統理論的串聯式再生制動控制策略分析[J].汽車工程,2015,37(3):313-320.
[3] FLEMING B.Electric vehicle collaboration-toyotamotor corporation and teslamotors[J].IEEE Vehicular Technology Magazine,2013,8(1):4-9.
[4] 金賢建,殷國棟,陳南,等.混合動力汽車回饋制動與防抱死制動協調魯棒控制[J].汽車工程,2015,37(9):1011-1016.
[5] 趙國柱,魏民祥.無刷直流電機電動汽車再生ABS雙閉環控制研究[J].汽車工程,2013,35(4):307-311.
[6] KAWAMURA H,ITO K,KARIKOMIT,et al.Highly-responsive acceleration control for the Nissan Leaf electric vehicle[C].SAE Paper 2011-01-0397.
[7] TAO G,BURKHOLDER JO,GUO J.Adaptive state feedback actuator nonlinearity compensation for multivariable systems[J].International Journal of Adaptive Control and Signal Processing,2013,27(1-2):82-107.
[8] BOTTIGLIONE F,SORNIOTTIA,SHEAD L.The effect of halfshaft torsion dynamics on the performance of a traction control system for electric vehicles[J].Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering,2012,226(9):1145-1159.
[9] BERRIRIM,CHEVREL P,LEFEBVRE D.Active damping of automotive powertrain oscillations by a partial torque compensator[J].Control Engineering Practice,2008,16(7):874-883.
[10] BAYAR K, WANG J, RIZZONIG.Developmentof a vehicle stability control strategy for a hybrid electric vehicle equipped with axlemotors[J].Proceedings of the Institution of Mechanical Engineers, Part D: Journal of automobile engineering,2012,226(6):795-814.
[11] LV C, ZHANG J, LIY, et al.Mode-switching-based active control of a powertrain system with non-linear backlash and flexibility for an electric vehicle during regenerative deceleration[J].Proceedings of the Institution ofMechanical Engineers,Part D:Journal of Automobile Engineering,2015,229(11):1429-1442.
[12] LAGERBERG A,EGARDT B.Backlash estimation with application to automotive powertrains[J].IEEE Transactions on Control Systems Technology,2007,15(3):483-493.
[13] PACEJKA H B,BAKKER E.Themagic formula tyremodel[J].Vehicle System Dynamics,1992,21(S1):1-18.
[14] ZHANG J, LV C, GOU J, et al.Cooperative control of regenerative braking and hydraulic braking of an electrified passenger car[J].Proceedings of the Institution of Mechanical Engineers,Part D: Journal of Automobile Engineering,2012,226(D10):1289-1302.
[15] LV C, ZHANG J, LIY.Extended-Kalman-filter-based regenerative and friction blended braking control for electric vehicle equipped with axle motor considering damping and elastic properties of electric powertrain[J].Vehicle System Dynamics,2014,52(11):1372-1388.
[16] SOVRAN G,BLASER D.Quantifying the potential impactsof regenerative braking on a vehicle's tractive-fuel consumption for the US, European, and Japanese driving schedules[C].SAE Paper 2006-04-03.
[17] 湯東勝,吳光強,董華林.電動汽車矢量控制的模糊—PID復合控制方式[J].汽車工程,2003,25(1):61-64.
[18] ZHANG Z, ZHANG J, SUN D, etal.Research on control strategy of electric-hydraulic hybrid anti-lock braking system of an electric passenger car[C].2015 IEEE Intelligent Vehicles Symposium.IEEE,2015:419-424.
[19] 丁能根,王偉達,余貴珍,等.基于試驗知識的ABS自適應控制策略研究與驗證[J].汽車工程,2009,31(1):28-32.
Anti-lock Braking Control for Electric Vehicle with Consideration of Backlash and Elasticity in Transmission System
Zhang Zhongshi1,2, W ang Lifang1, Zhang Junzhi3& M a Ruihai1,2
1.Institute of Electrical Engineering Chinese Academy of Sciences, Beijing 100190; 2.University ofChinese Academy of Sciences, Beijing 100049;3.Tsinghua University, State Key Laboratory of Automotive Safety and Energy, Beijing 100084
With consideration of the non-linearity of gear backlash and the elasticity of transmission system,a powertrain model of electric vehicle and a hydraulic brake system model are built to analyze the effects of transmission system characteristics on the performance of electric anti-lock braking system and driving comfort.In order to improve the effectiveness of electric anti-lock braking system in electric vehicle,a control strategy for compensating transmission system characteristics including the sliding-mode control of backlash's angular speed difference and the PID control of half-shaft torque is proposed to eliminate the negative effects of backlash and transmission system elasticity.Simulation is conducted to compare the control effectiveness of electric and hydraulic anti-lock braking systems with the proposed strategy and thatwithout transmission system characteristic compensation.The results show that the control scheme proposed enhances the anti-lock braking performance and improves the drivability and ride com fort of electric vehicle.
electric vehicles; transm ission system; gear back lash; half-shaft elasticity; regenerative braking;anti-lock braking
10.19562/j.chinasae.qcgc.2017.10.009
?國家重點研發計劃(2016YFB0101002)資助。
原稿收到日期為2016年8月31日,修改稿收到日期為2016年12月21日。
王麗芳,研究員,博士生導師,E-mail:wlf@ mail.iee.ac.cn。
