相鄰車道車輛并道預測與跟車控制改進的研究?
2017-11-08 02:01:03袁小慧郭應時
汽車工程 2017年10期
關鍵詞:模型
付 銳,袁小慧,郭應時,馬 勇
(1.長安大學汽車學院,西安 710064; 2.長安大學,汽車運輸安全保障技術交通行業重點實驗室,西安 710064)
相鄰車道車輛并道預測與跟車控制改進的研究?
付 銳1,2,袁小慧1,郭應時1,馬 勇1
(1.長安大學汽車學院,西安 710064; 2.長安大學,汽車運輸安全保障技術交通行業重點實驗室,西安 710064)
為在自適應跟車控制中,預測相鄰車道車輛的并道行為,提前調整自車速度控制策略,以提高自車的乘坐舒適性和安全性,通過采集和分析實際道路上自車與周圍車輛的運動狀態信息,建立相鄰車道車輛并道行為預測模型,并在此基礎上對現有期望間距跟車模型進行改進。仿真結果表明:自車車速vM、自車與前車的車頭時距t1、自車與前車的相對速度vML和自車與相鄰車道車輛的相對速度vMF可作為預測并道行為的表征參數;所建立的預測模型可提前2s預測并道行為的類型,對兩種并道行為預測的準確率分別達到88%和90%;改進的期望間距模型使跟車過程更加平穩,可提高車輛的舒適性與安全性。
跟車;并道預測;期望間距;Fisher判別法
前言
在跟車過程中,如果相鄰車道車輛(后簡稱相鄰車)突然并入本車道,插入至自車與前車之間,自車穩定的跟車狀態被打破,跟車間距突然減小,與前車的相對速度發生突變,極易引發交通事故。如果能夠提前預測到相鄰車道車輛的并道行為,并做出響應,自車的速度控制會更加平穩,車輛的乘坐舒適性和安全性均會得到提高。
目前對換道行為預測方面的研究大多是以換道車輛為自車,對其換道意圖進行識別,較少以相鄰車道車輛為研究對象,研究其并道意圖。文獻[1]中以實車試驗采集到的自車速度、自車與相鄰車的縱向間距和橫向間距、縱向相對速度和橫向相對速度和卡爾曼濾波預估得到的縱向相對加速度和橫向相對加速度等7個參數作為特征參數,采用模糊支持向量機對實車試驗數據進行訓練,并對相鄰車道車輛的并道意圖進行識別。文獻[2]中采用模糊決策思想,認為自車與相鄰車的橫向間距較小和橫向相對速度較大時,相鄰車更容易并道,采用該種判別方法定性描述了相鄰車的并道意圖,但未做到量化表達。文獻[3]中利用一種有關機率理論的模型對行車過程中車輛位置進行分析和預測,并結合傳感技術,能對開啟ACC系統進行跟隨行駛的車輛進行分析,并對本車道有車輛并入場景進行有效識別。文獻[4]中使用駕駛模擬器分析了安裝有ACC系統的車輛跟隨前車行駛時,面對本車道前方有載貨車并入的情況,通過問卷的形式對駕駛人是否信任ACC系統,即是否會主動操作,進行調查和統計分析,來衡量駕駛人對系統的依賴程度。文獻[5]中在未劃分車道線的道路上研究了同一車道內側前方車輛對跟車行為的影響,指出側向間距的增加會導致前后車跟車間距減小。文獻[6]中利用攝像機拍攝通過某一試驗路段的交通流視頻,經統計篩選得到相關數據,分析側向干擾因素尤其是側向車對后車的影響情況,從“引力”與“斥力”相互作用的特性角度出發,建立了考慮側向車影響的跟車模型。文獻[7]中建立駕駛人行為決策與車輛動力學耦合的混合狀態模型,根據觀測到的參數追蹤目標車輛的連續狀態,并采用隱馬爾科夫模型估計接近交叉口時駕駛人最可能的駕駛行為。
本文中針對高速公路上自車在跟車過程中有相鄰車道車輛并入自車車道這一現象,研究相鄰車的并入行為及其對自車行駛狀態的影響。篩選車輛間各運動狀態參數,建立預測模型對相鄰車輛的并道行為進行預測,并基于該模型,對現有的期望間距跟車模型進行改進。
1 并道行為特征參數的選取
本文中研究單向雙車道上的并道行為。如圖1所示,涉及的車輛包括自車M、前車L0、相鄰車F1和相鄰前車L1。試驗場景是M車在本車道跟隨L0車行駛;相鄰車道上F1車在縱向位于M車與L0車之間,且跟隨L1車行駛。F1車具有換道意圖,即F1車隨后會并道至本車道,且并道行為有3種情形。第1種情形是F1車并道至L0車之前,記為Merg1;第2種情形是F1車并道至M車與L0車之間,記為Merg2;第3種情形是F1車并道至M車之后,記為Merg3。由實際數據采集情況看,Merg3情形很少,且對M車的影響較小,本文中只討論Merg1和Merg2并道行為。

圖1 3種并道行為
1.1 試驗數據采集與處理
為采集本研究所需數據,進行了高速公路實車試驗。選取兩段交通量適中的全封閉雙向4車道高速公路為試驗路段,路段1限速100km/h,試驗里程為57.4km,路段 2限速 110km/h,試驗里程為40.5km。有10名駕駛人參與了本次試驗,年齡為28歲至51歲,均值為39.1歲,標準差為6.59歲;駕齡分布范圍為3年至25年,均值為14.4年,標準差為7.04年。試驗車為大眾途安1.8型自動擋轎車,配備有多種數據采集設備,試驗時主要使用德爾福ESR毫米波雷達、VBOX 3I差分GPS、多通道視頻監控系統和CAN數據采集卡等設備。
試驗前給參試駕駛人下達的唯一指令為從出發地駛往目的地,試驗車上另有一名測試人員。試驗過程中采集了包括自由行駛、跟車和換道等所有駕駛行為數據。試驗后,對采集的數據按如下原則進行篩選。
(1)試驗車的車速區間為60-100km/h。速度低于60km/h的數據不具備高速公路車輛正常行駛的特點,故予剔除。兩個試驗路段的限速分別為100和110km/h,篩選的樣本中超過100km/h的數據很少,本文中只選取車速低于100km/h的數據。
(2)M車與L0車的車頭時距小于5s。文獻[8]和文獻[9]中將5或6s的車頭時距作為自由行駛和跟車行為的分界值,本文中采用5s作為分界值,即將車頭時距小于5s的情形界定為跟車行為[10-11]。
(3)并道意圖的判斷依據為F1車開啟轉向燈,并道行為的判斷依據為F1車的橫向位置偏移。為確定相鄰車F1的并道意圖,由視頻信息將F1車轉向燈開啟時刻作為其并道意圖起始點,而F1車有單側橫向偏移的開始時刻為并道意圖的終止點,數據篩選時截取至該時刻前1~2s的連續數據。
基于以上原則,最終篩選出50次Merg1并道行為和50次Merg2并道行為,共包含800組Merg1并道行為樣本和 800組 Merg2并道行為樣本。其中,Merg1并道行為中速度在[60,80)km/h的數據共370組,在[80,100)km/h區間的數據共 430組;Merg2并道行為中速度在[60,80)km/h的數據共320組,在[80,100)km/h區間的數據共480組。在數據分析前,采用鄰域平滑濾波方法對數據進行去噪處理。
1.2 并道行為表征參數分析
本文中初步選取與并道行為相關的參數有:自車速度vM;自車M與前車L0的縱向間距d1,自車M與前車L0的車頭時距t1,自車M與前車L0的縱向相對速度vML;自車M與相鄰車F1縱向間距d2,自車M與相鄰車F1的車頭時距t2,自車M與相鄰車F1的縱向相對速度vMF;自車M的縱向加速度a0,前車L0的縱向加速度a1和相鄰車F1的縱向加速度a2。這些參數均可由GPS和雷達所采集的數據計算得到。
表1為樣本數據中M車分區間速度分布情況。兩速度區間下,在兩種并道類型Merg1和Merg2中M車速度的均值、最大值和最小值相差不大。

表1 自車M行駛速度分布數據統計
圖2為加速度a0,a1和a2分速度區間統計盒形圖。在并道類型Merg1和Merg2中M車、L0車和F1車的加速度a0,a1和a2在兩個速度區間的區分度不大,且異常數據點很多,因此不將加速度a0,a1和a2作為預測F1并道行為的指標。
在建立并道行為預測模型之前,為確定并道行為表征參數,對初選參數進行了相關性和多重共線性檢驗。在排除a0,a1和a23個參數之后,對其余7個變量 (vM,t1,t2,vML,vMF,d1,d2) 進行線性相關性分析,并繪制相關系數矩陣圖,見圖3。
圖3中橢圓色塊可以直觀地表示變量間的線性相關程度。橢圓的形狀表示相關性強弱,長軸方向表示變量是正相關還是負相關。而橢圓中的數值則定量給出7個變量兩兩間相關系數值,數值大表明相關度高。從圖中可以看出,d2與t2和d1與t1的線性相關度是最高的,其相關系數分別達到0.98和0.95。此外,d2與d1和vM的線性相關性也較強,其相關系數分別為0.57和0.61。而vML和vMF與其余變量相關系數均小于0.4,線性相關性較弱。綜上所述,可考慮去除與其它變量相關性最強的變量d1和d2。

圖2 自車、前車和相鄰車的加速度分速度區間

圖3 相關系數矩陣
多重共線性診斷的方式很多,本文中用各參數的方差膨脹因子進行多重共線性診斷。進行參數xi關于其余自變量的多元線性回歸,計算其模型判定系數,記為R2i。

式中:SSEi為殘差平方和,SSTi為總離差平方和。
第i個參數的方差膨脹因子VIFi為

基于方差的膨脹因子診斷多重共線性時,存在如下診斷規則:VIFi<5時,認為不存在多重共線性(或共線性較弱);5≤VIFi≤10時,認為存在中等程度共線性;VIFi>10時,則說明共線性較高,必須消除多重共線性。
計算 7 個變量 vM,t1,t2,vML,vMF,d1和 d2的方差膨脹因子,得 VIF7= [12.6140,79.3822,101.7321,1.2747,1.1917,114.6772,128.3634], 可見存在嚴重共線性,首先去掉共線性最顯著的d2和d1,重新計算多方差膨脹因子,有VIF5=[1.2823,1.4933,1.7139,1.2515,1.1387]。 由此可見,vM,t1,t2,vML和vMF這5個參數共線性很弱。
表2和表3給出了Merg1并道和Merg2并道行為在速度區間[60,80)km/h 和[80,100)km/h 下, t1,t2,vML和vMF等4個參數的數據匯總。
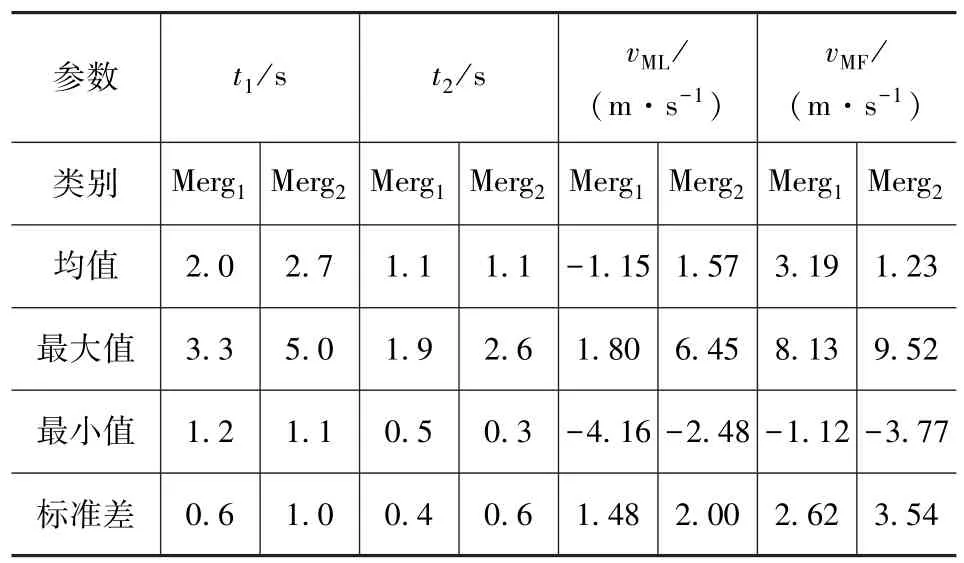
表 2 速度[60,80)km/h 下 t1,t2,v ML和 v MF值
對比表2和表3,可以看出,在兩個速度區間下,并道類型Merg2的t1和vML均大于并道類型Merg1;并道類型Merg2的vMF則小于并道類型Merg1;而對于參數t2,兩個速度區間下的趨勢不一致。綜合考慮參數的分布特征和共線性,本文將vM,t1,vML和vMF等4個參數作為并道行為的表征參數。

表 3 速度[80,100)km/h 下 t1,t2,v ML和 v MF
2 相鄰車道車輛并道行為預測模型的建立
2.1 預測模型的建立
由于Fisher判別法對數據的分布特征和方差大小等沒有要求,本文中選用Fisher判別法來預測相鄰車的并道行為。Fisher判別采用一元方差將k組p維數組投影在某方向上,使組間樣本盡量區分開,而組內樣本差距盡量小。下面簡述線性判別式的建立和判別準則的確定。
(1)判別式的建立
Fisher判別法的相關定義為:設有k個p維總體G1,G2,…,Gk, 從總體 Gi中抽取的樣本記作 xi1,則樣本總數、樣本均值和各總體樣本均值分別為和假設投影方向為a = (a1,a2,…,ap)T,將 xij在a 上投影,則yij= a′xij(i= 1,2,…,k;j= 1,2,…,ni),從而可得出投影數據均值分別為 y-=則 yij(i = 1,2,…,k;j=1,2,…,ni)的組間離差平方和SSG與組內離差平方和SSE分別為



若投影后的k組數據有明顯區別,則F或Δ(a)應充分大,因此求Δ(a)最大值點,即可得出一個投影方向a,并約束a為單位向量。
根據矩陣相關知識,Δ(a)的最大值是E-1B的最大特征值。設E-1B中所有不為0特征值的排列為 λ1≥λ2≥… ≥λs,s≤min(k-1,p),相應的單位特征向量依次為則第 i判別式為第i判別式的判別效率為λi,對每組判別的貢獻率為如果前r(r≤s) 個判別式的總貢獻率高出了一個閾值(如85%以上),則可利用前r個判別式很好地區分各組。

(2)判別準則的確定
選定前r個判別式進行判別,將它們作用在任意樣本 x上,得出投影向量(y1,y2,…,yr)T,即為 x的判別式得分向量;將前r個判別式作用在第i組的組均值xi上,得投影向量計算這兩種投影向量的歐氏距離,則判別準則為

將篩選的800組Merg1并道樣本和800組Merg2并道樣本中的一半數據作為訓練數據,建立預測模型,另一半樣本用于預測模型的檢驗。
Merg1并道類型和Merg2并道類型和所有并道行為的各參數訓練數據均值分別為

特征值只有一個,為 1.577 2,貢獻率達到100%。得到判別矩陣為

將Merg1并道類型和Merg2并道類型各參數均值x-(1)和 x-(2)分別代入 Fisher判別式 Can中,得到Merg1并道類型的判別式均值為2.059 3,Merg2并道類型的判別式均值為-1.947 7。由于本文中是對兩個總體的判別分析,歐氏距離等價于求一維空間中的距離,由此,求判別原則等價為根據樣本個數加權得到判別臨界值為0.055 8。
2.2 模型結果分析
由800個訓練樣本數據的判別式得分散點圖如圖4所示。

圖4 訓練樣本的判別式得分分布
從圖中可以看出,由判別準則,即臨界值0.055 8能很好地將兩種并道行為分離開,只有很少一部分有交叉。特別是對Merg1并道類型的預測效果更為理想,只有個別數據點判別錯誤。由訓練樣本得出Fisher判別式得分的Merg1和Merg2并道類型的正態密度函數曲線見圖5。

圖5 Merg1和Merg2并道類型的正態密度曲線
由圖5可以看出,在臨界值0.055 8處,Merg2并道類型的概率密度約為0.12,Merg1并道類型的概率密度約為0.1。故根據本文中所建立的判別準則,Merg1并道行為的判別準確率約為90%,Merg2并道行為的判別準確率約為88%。
根據訓練數據對待檢驗的800組數據進行判定,得到判定準確率矩陣即混淆矩陣,如表4所示。對于400組Merg1并道類型,有12組判斷錯誤,將其誤判為Merg2并道類型;對于400組Merg2并道類型,有43組判斷錯誤,將其誤判為Merg1并道類型。因此,上述預測模型對Merg1并道類型的判斷準確率為97%,對Merg2并道類型的判斷準確率為89.3%。

表4 預測模型混淆矩陣
3 考慮相鄰車道車輛并入的跟車控制改進與仿真
3.1 跟車模型的選擇
目前跟車模型主要有安全距離模型和期望間距模型等。其中,前者給定的是后車跟隨前車行駛時的安全跟車臨界值,只能作為跟車時安全特性的一個表征,不能反映高速公路駕駛人的跟車特性。期望間距跟車模型反映了駕駛人跟車行駛時的心理期望間距,實時刻畫了駕駛人跟車行駛時的間距,因此,相對安全間距跟車模型,期望間距跟車模型能夠更真實、貼切地反映駕駛人的駕駛特性。
文獻[12]中建立了期望間距跟車模型,包括期望間距均值模型Davr、期望間距最大與最小值模型Dmax,Dmin和加速度模型 an(t+T):

式中:v為自車速度,km/h;v′(t)是前車相對自車的速度,m/s;T是駕駛人的反應時間,取0.8s。
該模型是根據高速公路實車試驗數據得出的,與本研究的前提條件較為接近,故將其作為基礎模型。
3.2 跟車模型的改進
當車輛處于穩定跟車狀態時,跟隨車輛的運動由上述期望間距模型控制,此時若有相鄰車并入,即當F1車并入本車道時,M車的跟車控制會將跟隨目標由L0車切換為F1車,通常情況下,目標切換時間為F1車的越線時刻。
根據2.1節所建立的并道預測模型,可實現在相鄰車并入本車道前2s時預測到并道行為,即在F1車發生單側橫向偏移前的2s。當駕駛人感知到相鄰車的并道意圖時,通常會根據與相鄰車的間距和相對速度松開油門踏板,或實施輕微制動。模擬駕駛人的該操作行為,在預測到相鄰車的并道行為后,若M車與F1車的間距小于期望間距,則對M車施加0.5m/s2的減速度。
應用文獻[13]中的研究結果:當F1車發生單側橫向偏移后0.6s,即可識別出F1車的并道行為。因此對M車施加0.5m/s2的減速度后,若F1車放棄并道,則M車繼續跟隨L0車,切換回期望間距模型。若F1車實施并道,在F1車發生單側橫向偏移0.6s時,判斷M車與F1車的間距,若M車與F1車的間距大于期望間距,則按照期望間距模型進行控制,將跟隨目標切換為F1車;若M車與F1車的間距小于期望間距,則繼續減速行駛,至F1車越線時,將跟隨目標切換為F1車。文獻[14]中得出我國小型客車的平均換道持續時長為5.6s,因此改進的跟車控制策略其跟隨目標切換時刻比原跟車模型要提早2.2s。
3.3 有相鄰車并入的跟車仿真
PreScan是用于汽車先進輔助系統和主動安全系統開發驗證的仿真工具。本文中采用PreScan與MATLAB/Simulink對上述跟車過程進行聯合仿真。
通過情景假設、仿真場景設置、添加傳感器和控制模塊實現運動仿真。在仿真之前進行如下假設:假設在相鄰車并道前,M車在本車道跟隨L0車行駛時已達到穩定跟車狀態,L0車始終沿本車道勻速行駛;F1車在并道過程中速度也保持不變。仿真場景設置如下:在PreScan中選取與試驗車相似的車型,并參照試驗車的數據對相關參數進行設置;設定仿真道路為雙向4車道,車道寬度為3.75m;M車的初始車速為23m/s,L0車始終以23m/s的速度勻速行駛,F1車在并入本車道前、后始終以20m/s的速度勻速行駛,M車與F1車的初始縱向間距為45m。文獻[15]中得出的車輛換道持續時長為(5.3±1)s,同時參考文獻[14]將換道持續時長設定為5.6s。在國標中規定ACC系統的平均減速度不應大于3.0m/s2(以2s的長度按采樣求均值),系統的加速度不大于2m/s2[16],因此,取 M車的加速度變化范圍為-3m/s2≤a0≤2m/s2。仿真選用TIS距離檢測傳感器,對自車與前車之間的距離、相對速度和相對角度進行監測。將選用的期望間距跟車模型與上述改進的跟車模型分別導入Simulink控制模塊中,進行仿真和對比分析。
原期望間距跟車模型和改進跟車模型仿真結果如圖6和圖7所示。

圖6 原期望間距跟車模型仿真結果

圖7 改進跟車模型仿真結果
對比圖6和圖7,當有車輛并道時兩個模型均能實現對跟隨目標的切換和有效控制,但兩個模型的響應有所不同。比較二者的跟車間距:原期望間距模型的跟車間距偏離平均期望間距的幅度比較大,存在突破最小期望間距的情況;改進模型,由于預測到了相鄰車的并道行為,提前實施了小幅度的減速,跟車間距偏離平均期望間距幅度小,始終介于最大和最小期望間距之間,最小間距比原模型長6.4m,安全性得以提高。比較自車車速的變化:當相鄰車并道時,原期望間距模型的自車速度調整幅度大,響應快速,降至最低車速(16.98m/s)后,首次等于F1車車速(20m/s)的時間為23.25s;改進的跟車模型,降至最低車速(17.71m/s)后,首次等于F1車車速(20m/s)的時間為27.15s,自車速度的調整較為平緩,速度調整幅度小。可見改進模型在相鄰車并入過程中的速度調整更加平穩,乘坐的舒適性有所改善。
仿真得到兩個跟車模型的跟隨車制動壓力和加速度,結果對比如圖8所示。對比兩個模型的制動壓力和加速度,在相鄰車并入階段,改進跟車模型的制動壓力和加速度的變化均小于原期望間距模型,其中,制動壓力小于 0.78MPa,減速度沒有超過-0.5m/s2,而原期望間距模型的制動壓力突然增大,達到 2.2MPa,而減速度也出現一個峰值,達到-1.28m/s2。在跟隨目標切換后的調整階段,原期望間距模型的加速度也略大于改進模型的加速度。
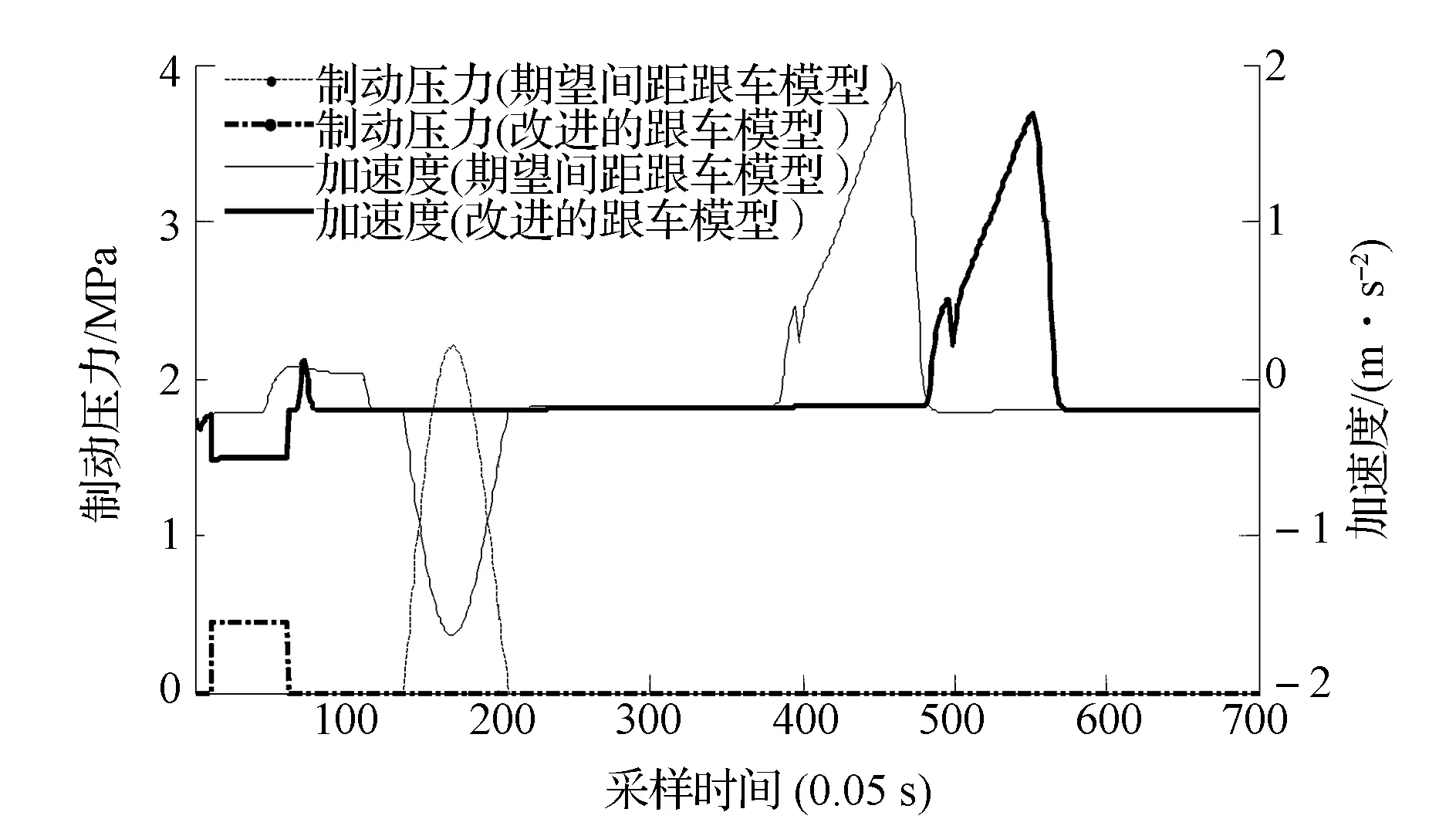
圖8 跟隨車的制動壓力和加速度對比
改變F1車并道時的縱向位置,將M車與F1車的初始縱向間距分別增加和減小10m,其余條件不變,重新進行仿真,兩個模型各參數的仿真結果見表5。表中間距是指M車與F1車的縱向間距,初始時刻是指F1車并道前2.45s,并道開始時刻是指F1車發生單向橫向偏移的初始時刻,越線時刻是指F1車的越線時刻。

表5 不同并入位置下兩個模型的評價參數比較
對比兩個模型的仿真結果,并道開始時刻M車與F1車的間距相差不大;但在越線時刻M車的速度已有差異,由于原期望間距模型要到越線時刻才切換跟車目標,故M車的速度仍接近于初始速度,而改進模型已預測到F1車的并道行為,提前進行了速度調整,因此在越線時刻M車的速度已比初始速度有所下降;也使得二者的最小間距、最大制動壓力和最大制動減速度均有較大差異。特別是當初始間距為35m時,原期望間距模型的最大制動減速度已達到減速度的界限值-3m/s2,最小間距已大大小于最小期望間距,而改進模型的最大制動減速度僅為-0.88m/s2,且最小間距比原模型長4.8m。
4 結論
(1)通過采集和分析高速公路上自車、前車和相鄰車的運動狀態參數,得出當相鄰車有并道意圖時,自車速度vM、自車與前車的車頭時距t1,前車與自車的相對速度vML和相鄰車與自車的相對速度vMF這4個參數與并道類型相關性強,可作為相鄰車道車輛并道行為的表征參數。
(2)基于上述4個表征參數采用Fisher判別法建立并道行為預測模型,能在相鄰車并道前2s預測其并道行為類型,相鄰車并道至自車之前和并道至前車之前這兩種并道類型的預測準確率分別達到88%和90%。
(3)對現有期望間距跟車模型進行改進,當預測到相鄰車輛的并道意圖時,提前對自車的速度進行調整。對改進模型與原期望間距跟車模型的自車速度控制和與前車的最小間距進行仿真對比。結果表明,改進模型能預測相鄰車的并道行為,并調整自車車速,當有相鄰車道車輛并入時,可使自車的速度控制更加平穩,改善乘坐的舒適性,同時保證最小跟車間距,提高跟車控制的安全性。
(4)本文中在樣本選取時僅選擇相鄰車有并道意圖,且實際實施了并道,并道類型有差異情況的樣本。而實際并道行為的種類更加多樣,因此本文中預測模型和判別臨界值還應針對更多樣的類型和實際數據進行訓練,才能有較好的適應性。
本文中對期望間距跟車模型的改進僅體現在從預測時刻到相鄰車輛越線這個時段對自車速度的調整,雖然比原模型對車速的控制有明顯改善,但并未對期望間距模型本身做進一步的研究與調整,今后應對此做更深入的研究,以確認改進模型是否是最優解決方案。
[1] 馬國成,劉昭度,裴曉飛,等.基于模糊支持向量機的旁車道車輛并線意圖識別方法[J].汽車工程,2014,36(3):316-320.
[2] MOON S,KANG H,YIK.Multivehicle target selection for adaptive cruise control[J].Vehicle System Dynamics,2010,48(11):1325-1343.
[3] DAGLI I,BREUEL G,SCHITTENHELM H,et al.Cutting-in vehicle recognition for ACC systems-towards feasible situation analysis methodologies[C].Intelligent Vehicles Symposium, IEEE,2004:925-930.
[4] RAJAONAH B,ANCEAUX F,VIENNE F.Trustand the use ofadaptive cruise control: a study of a cut-in situation[J].Cognition,Technology & Work,2006,8(2):146-155.
[5] GUNAY B.Car following theory with lateral discomfort[J].Transportation Research Part B: Methodological,2007,41(7):722-735.
[6] 陶鵬飛.考慮側向車影響的跟馳行為分析與建模[D].長春:吉林大學,2009.
[7] GADEPALLY V,KRISHNAMURTHY A,OZGUNERU.A framework for estimating driver decisions near intersections[J].IEEE Transactions on Intelligent Transportation Systems,2014,15(15):637-646.
[8] 何民,榮建,任福田.判定跟馳狀態的研究[J].公路交通科技,2001,18(4):74-78.
[9] 楊小寶,張寧.一種改進的跟馳狀態判定方法[J].交通運輸系統工程與信息,2006,6(2):14-17.
[10] MICHAELS R M.Perceptual factors in car following[C].Proceedings of the Second International Symposium on the Theory of Road and Traffic Flow, OECD,1963:44-59.
[11] 魏麗英,雋志才,田春林.駕駛員車道變換行為模擬分析[J].中國公路學報,2001,14(1):77-80.
[12] 袁偉,付銳,馬勇,等.基于高速實車駕駛數據的駕駛人跟車模型研究[J].汽車工程,2015,37(6):679-685.
[13] 王暢,付銳,郭應時,等.換道預測系統中越線時間的預測方法[J].汽車工程,2014,36(4):509-514.
[14] 吳晨.基于PRESCAN的兩種換道預警模型的仿真與對比分析[D].西安:長安大學,2015:10-20.
[15] WAKASUGIT.A study on warning timing for lane change decision aid systems based on driver's lane change maneuver[C].Proc.19th International Technical Conference on the Enhanced Safety of Vehicles,Paper 2005(05-0290).
[16] GB/T 20608—2006智能運輸系統自適應巡航控制系統性能要求與檢測方法[S].北京:中國標準出版社,2007.
A Study on the Merging Prediction of the Vehicle on Adjacent Lane and the Improvement of Vehicle-following Control
Fu Rui1,2, Yuan Xiaohui1, Guo Yingshi1& M a Yong1
1.School of Automobile, Chang'an University, Xi'an 710064;2.Chang'an University, Key Laboratory of Automotive Transportation Safety Technology, Ministry of Transport, Xi'an 710064
For predicting themergingmanoeuvre of the vehicle on adjacent lane,and adjusting the control strategy of ego-vehicle speed in advance to enhance the ride comfortand safety of ego-vehicle in adaptive car-following control,a predictivemodel for themergingmanoeuvre of the vehicle on adjacent lane is established by collecting and analyzing the real world motion state information of ego-vehicle and surrounding vehicles,and based on which the existing desired vehicle spacingmodel for vehicle following is improved.The results of simulation show that four variables can be regarded as characteristics parameters to predictmerging behavior.They are the speed of ego-vehicle,the time headway and relative speed between ego-vehicle and preceding vehicle and the relative speed between ego-vehicle and the vehicle on adjacent lane.The predictivemodel can predict the type ofmerging behavior 2 seconds in advance,and the prediction accuracy rates for twomerging types reach 88%and 90%respectively.The improved desired vehicle spacingmodelmakes vehicle following processmore stable,with the ride comfort and safety of vehicle enhanced.
vehicle follow ing; merging prediction; desired spacing; Fisher discrim ination method
10.19562/j.chinasae.qcgc.2017.10.002
?教育部創新團隊發展計劃項目(IRT_17R95)、國家自然科學基金(61473046,61374196)和中央高校基本科研業務費專項資金項目(310822153101,310822161006)資助。
原稿收到日期為2016年10月24日,修改稿收到日期為2016年12月22日。
馬勇,博士研究生,E-mail:mayong@ chd.edu.cn。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
