基于模糊控制的電動輪汽車再生制動能量回收研究?
2017-11-08 02:01:02靳立強孫志祥
汽車工程 2017年10期
靳立強,孫志祥,王 熠,鄭 迎
(1.吉林大學,汽車仿真與控制國家重點實驗室,長春 130022; 2.燕山大學信息學院計算機教學實驗中心,秦皇島 066004;3.華域汽車系統股份有限公司,上海 200041)
基于模糊控制的電動輪汽車再生制動能量回收研究?
靳立強1,孫志祥1,王 熠2,鄭 迎3
(1.吉林大學,汽車仿真與控制國家重點實驗室,長春 130022; 2.燕山大學信息學院計算機教學實驗中心,秦皇島 066004;3.華域汽車系統股份有限公司,上海 200041)
為提高電動輪汽車制動過程中再生制動能量的回收率以達到節約能源的目的,提出了一套適用于電動輪汽車的全新構型機電復合再生制動系統及控制策略。在該控制策略中,考慮到電池SOC值和制動強度對電機再生制動力矩的影響,設計了雙輸入單輸出的模糊控制器,并在AMESim軟件平臺中搭建了15自由度的電動輪汽車的整車仿真模型和再生制動系統與液壓制動系統的仿真模型,在不同的制動強度下采用UDDS循環進行AMES-im-Simulink聯合仿真。結果表明,所制定的控制策略能滿足要求,在保證制動效能的前提下實現再生制動能量的有效回收。
車輛工程;再生制動能量回收;模糊控制器;制動力分配;聯合仿真
前言
再生制動能量回收可回收電動汽車減速制動時的部分動能并將其轉化為電能儲存起來,是解決電動汽車因電池密度低導致的續駛里程短的一種有效措施[1-2]。其工作原理是:當固定轉子的轉速高于定子上線圈產生的磁場轉速時,轉子將切割磁場,由此產生的感應電流和感應電動勢將會形成制動力矩阻止輪轂轉動,并開始將電能儲存到電池或超級電容中[3-4]。而輪轂電機驅動汽車是一種將驅動、傳動和制動集成一體的電動汽車,具有轉矩控制精準和容易獲得的優點,同時也簡化了汽車結構,操作簡單,便于維修,故對于電動輪汽車的制動能量回收極具進一步研究意義[5]。
國外方面,文獻[6]中針對前輪電機驅動車輛,提出了3種典型的制動力分配控制策略。在對并聯再生制動控制策略研究的基礎上,文獻[7]中提出了再生制動神經網絡控制策略。文獻[8]中提出了通過增大電機再生制動力的方法來提高制動能量的回收效率。文獻[9]中基于模糊控制邏輯提出了再生制動控制分配策略,并確定了車輪液壓制動力及ABS系統的控制方案,實現了四輪獨立驅動HEV再生制動與液壓制動的協調控制。國內方面,文獻[10]中提出了一項再生制動與氣壓制動協調控制的專利。文獻[11]和文獻[12]中以制動能量回收兼顧制動安全性為目標,提出了再生制動與ABS的集成控制策略。文獻[13]和文獻[14]中基于最優控制理論,把混合動力電動汽車再生制動系統對駕駛員制動意圖的識別時間縮短到0.5s,把制動能量的回收率提高了近20%。文獻[15]中通過帶有ABS氣壓制動系統的AMESim模型,對再生制動與制動防抱死的集成控制進行了相關的研究。文獻[16]中基于純電動客車BK6122的再生制動系統,提出了“分段復合”再生控制策略,基于新開發的控制策略車輛的制動能量回收率比原車提高了約3%。
針對輪轂電機驅動的電動汽車[17],本文中在重新設計制動系統部分結構的基礎上,提出了相應的制動能量回收控制策略,在各制動強度下,以固定比例進行前后輪制動力的分配,基于設計的模糊控制邏輯得到機電復合制動下電機制動力占總制動力的系數,在保證電動輪汽車制動穩定性的基礎上能夠高效回收制動能量。最后采用AMESim-Simulink軟件對提出的控制策略進行了聯合仿真分析。結果表明,本文中所制定的控制策略滿足要求,既能達到緊急制動工況下的制動防抱死目的,又能在制動過程中回收大量能量,延長了汽車續駛里程。
1 制動系統結構設計
本文中的研究對液壓制動系統部分結構進行了重新設計,其結構簡圖如圖1所示。該設計方案采用原車自帶的制動操作機構,在主缸與輪缸之間安裝了回路控制閥和高壓蓄能器。當電動輪汽車工作在純電機制動模式時,控制閥處于關閉狀態,此時由主缸過來的高壓液體將儲存在高壓蓄能器中;當汽車進入純液壓制動模式時,回路控制閥處于開啟狀態,高壓液體由主缸進入輪缸進行液壓制動;當汽車進入機電復合制動模式時,輪轂電機將會優先提供制動力,此時控制閥關閉,主缸液體流入高壓蓄能器,當電機制動中途出現故障,或電機提供的最大制動力還不能滿足車輛制動的需求時,回路控制閥將開啟,使高壓蓄能器快速建立液壓制動力,由液壓制動系統提供輔助制動。由于本文中的設計改造會導致機電復合制動開始階段不能降低液壓制動力,故將原車制動防抱死系統中的液壓制動替換為可實時調節的電機制動進行力矩調節,實現機電復合制動防抱死控制。具體策略:通過比較,判斷實時滑移率是否處于設定的滑移率上下限之間;若不滿足要求,則通過增加或減小5%的當前電機制動力矩來調節制動力需求和抱死狀態,直至車速低于設定車速時退出控制策略。

圖1 液壓制動系統結構簡圖
2 制動模式判斷及制動力分配
汽車的制動模式判斷流程圖如圖2所示。當汽車有制動信號輸入時,若電池的SOC值高于0.85,為避免制動能量回收導致電池過充而造成損害,不進行電機制動,此時進入純液壓制動模式。當電池的SOC值小于0.85時,若制動踏板位移l小于踏板位移設定值λ,說明駕駛員希望進行低強度制動,汽車將進入純電機制動模式,此時輪轂電機作為發電機進行能量回收;若l大于λ,說明此時駕駛員的意圖是希望能夠較快速減速,采取的是中高強度的制動,汽車將進入機電復合制動模式,即液壓制動系統和輪轂電機都要參與工作進行制動[18]。

圖2 制動模式判斷圖
在目前的研究中,主要用到4種典型控制策略來協調分配前后輪制動器制動力,分別是理想制動力分配控制策略、最優制動能量回收控制策略、并聯制動能量回收控制策略和制動力按固定比例分配控制策略。由于制動力按固定比例分配控制策略是在滿足ECE制動法規的條件下,盡可能地增加電機制動力參與制動的比例,且前軸制動力不會超過ECE法規規定的最大值,能夠滿足前后軸的制動力按確定比例系數進行分配,即符合前后軸制動力按β曲線分配的原則,提高了制動能量的回收效率。故本文中在研究前后軸制動力分配中采用了固定比例分配控制策略[19],即按圖3中的β曲線進行分配。純電機制動時的制動力將按D點進行分配,機電復合制動時的制動力按照E點進行分配。其中,Fmf和Fhf分別為前輪的電機制動力和液壓制動力;Fmr和Fhr分別為后輪的電機制動力和液壓制動力。
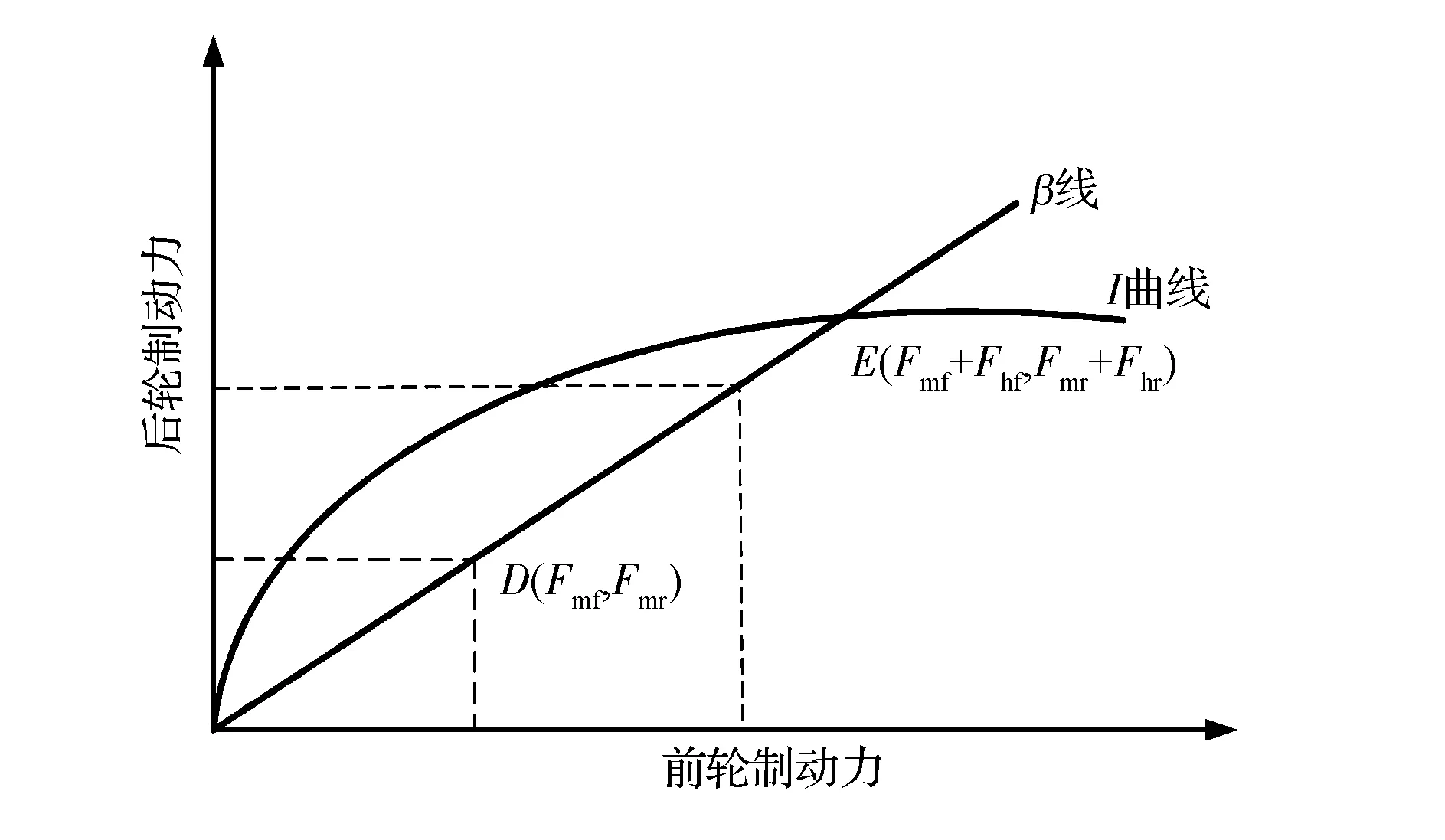
圖3 前后輪制動力分配曲線
3 模糊邏輯控制器的設計
引入變量Km,表示輪轂電機制動力占總制動力的比例系數,即Km=Fm/FTotal。本文中在計算Km值的過程中采用了魯棒性強的模糊控制器[20-21]。
(1)選擇輸入、輸出變量
由于汽車制動需求力矩可以根據制動踏板位移計算出來,此外,電池SOC值影響著電機制動力矩。所以,在設計模糊控制器時,輸入的兩個變量分別為制動踏板位移l和電池SOC值,輸出的一個變量為電機制動力占總制動力的比例Km。
(2)輸入量的模糊化
由圖2可知,當電池SOC值大于0.85時,Km值應等于0;當電池SOC值小于0.85且制動踏板位移小于λ(設為0.25)時,Km值應等于1。當電池SOC值小于0.85且制動踏板位移大于0.25時,汽車將進行中高強度制動,進入機電復合制動模式,選取制動踏板位移l的模糊論域為[0.25,1],相應的模糊子集為{L,M,H};選取電池SOC的模糊論域為[0,0.85],相應的模糊子集為{L,M,H}。各自隸屬度函數如圖4和圖5所示。其中,本段及下文中的L,M和H分別表示為低、中和高。
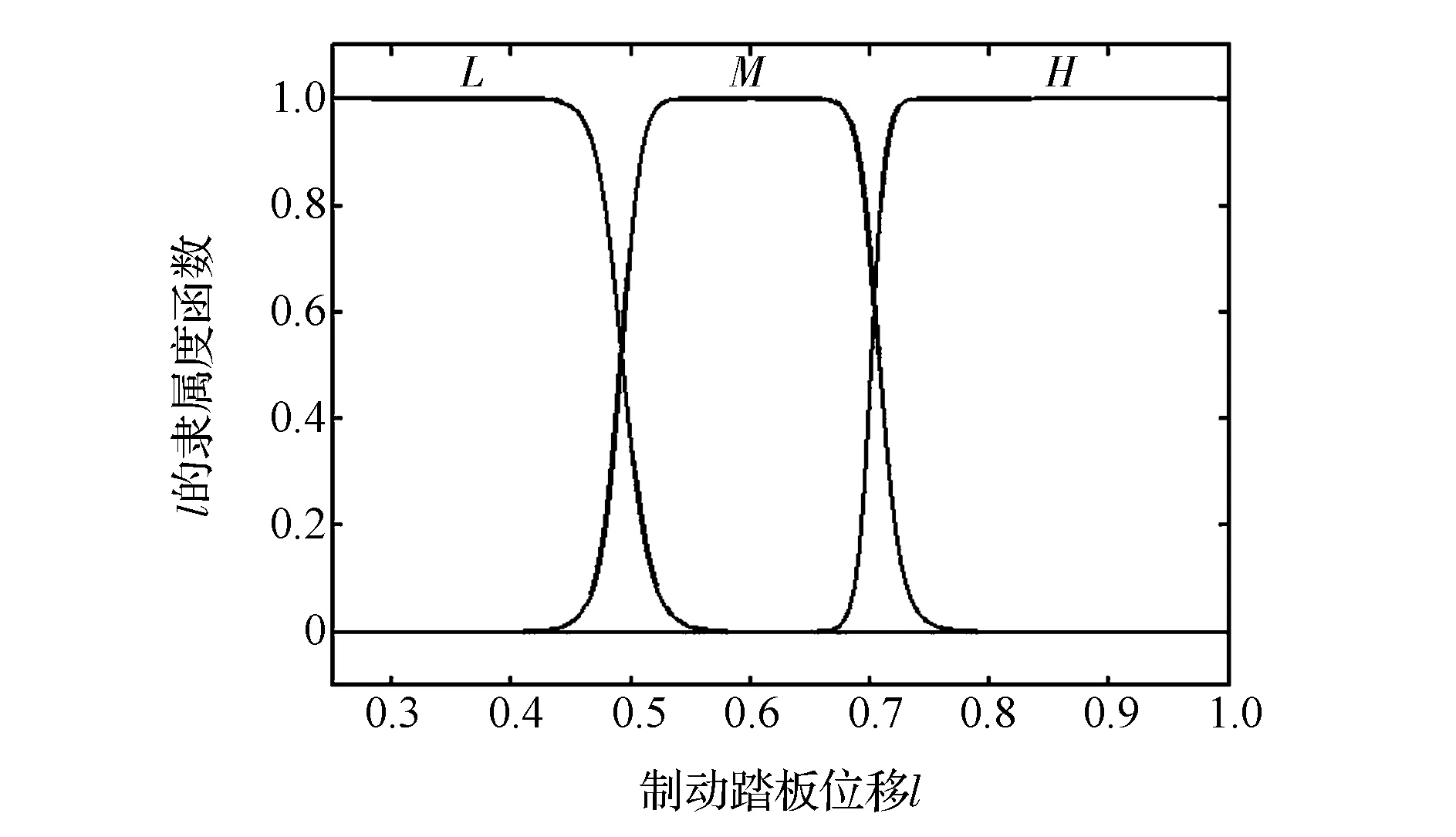
圖4 制動踏板位移隸屬度函數

圖5 電池SOC隸屬度函數
(3)模糊控制規則
由上面分析可知,當電池SOC值和制動踏板位移l越小時,由輪轂電機產生的制動力就應越大。據此可制定模糊控制規則,如表1所示。

表1 模糊控制規則
(4)輸出量的反模糊化
經過模糊控制器后,制動踏板位移l和電池SOC值可轉化為精確的輸出量,本文中的輸出量為電機制動力占總需求制動力的比例Km,其模糊論域為[0,1],選取的模糊子集為{L,M,H}。 相應的隸屬度函數如圖6所示。

圖6 輸出量K m的隸屬度函數
假設通過上面模糊控制器計算得到的電機制動力矩為Tm,而由于電機約束可獲得的最大電機制動力矩為Tmax,則實際電機制動力矩應取較小者,即為min(Tm,Tmax)。 此時若 Tm>Tmax,為滿足制動需求,多余的電機制動力矩(Tm-Tmax)將會由液壓制動系統協調提供。
4 聯合仿真分析
在AMESim軟件平臺搭建15自由度電動輪汽車的整車動力學及機電復合再生制動系統的仿真模型,利用Matlab/Simulink軟件搭建制動能量回收仿真模型[22-23]。
4.1 40km/h初始速度制動工況仿真
在該制動工況仿真中,設置電池初始SOC值為0.5,路面利用附著系數為0.8,車輛開始制動時的速度為40km/h,制動強度分別為z=0.15,z=0.5和z=0.8。圖7為不同制動強度下的車速變化情況。圖8為不同制動強度下的制動能量回收情況。圖9為不同制動強度下的電機制動力矩與液壓制動力矩變化情況。表2為不同制動強度下的制動能量回收效果對比。由圖7、圖8和表2可知,隨著制動強度的增加,回收的制動能量會有所降低。表2中顯示,當制動強度分別為0.15,0.5和0.8時,制動能量回收率為72.3%,49.0%和38.8%,由此可見,本文中所制定的控制策略在不同制動強度下均能表現出較強的制動能量回收能力。由圖9可知,當汽車進行低強度制動時,全部制動力矩將由電機提供,液壓制動系統不參與工作,并且隨著制動強度的上升,總制動力矩會提高,相應的電機制動力矩占總制動力矩的比例也會下降,符合本文中所制定的電液制動力矩分配控制策略。
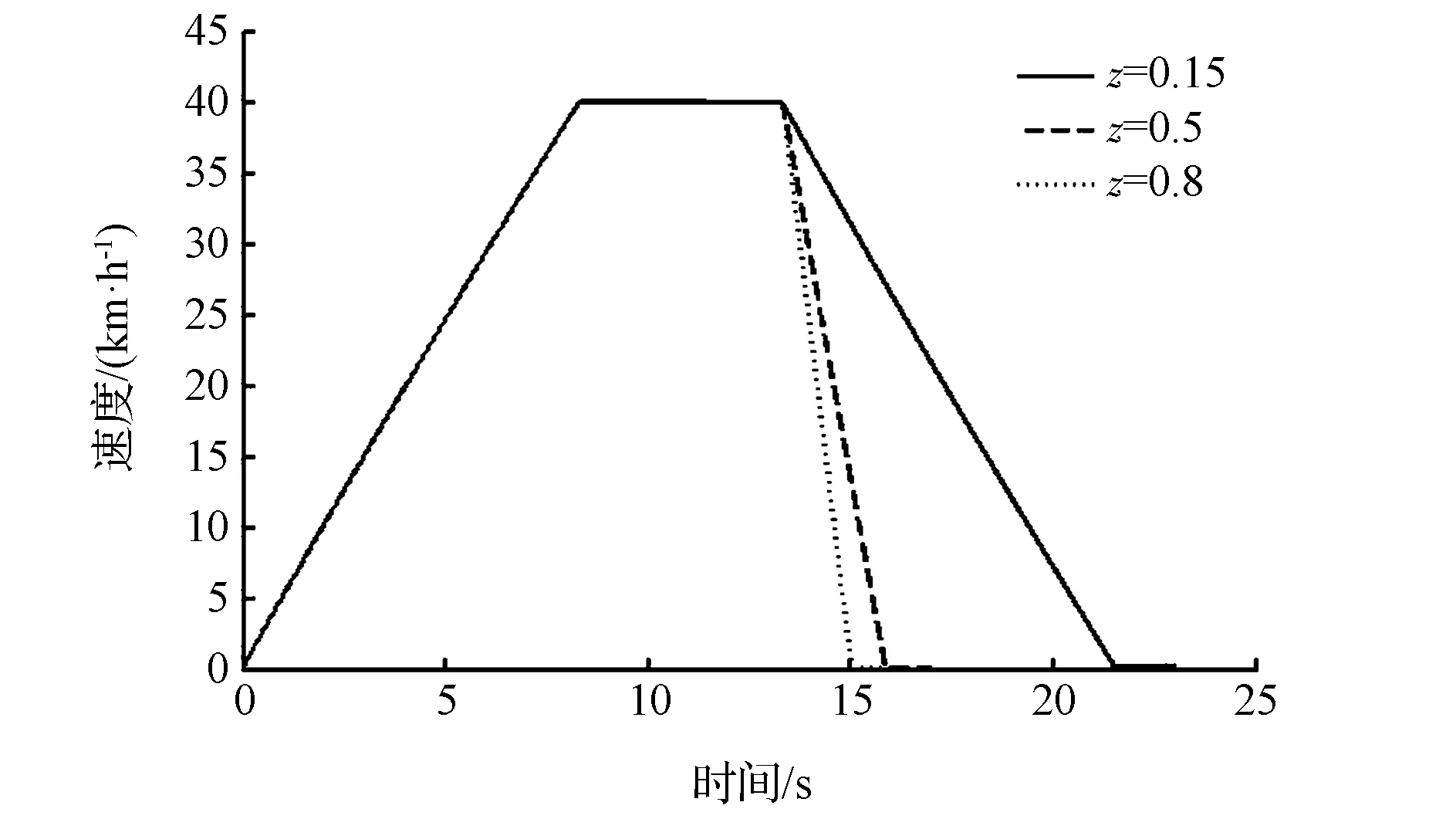
圖7 不同制動強度下車速變化曲線
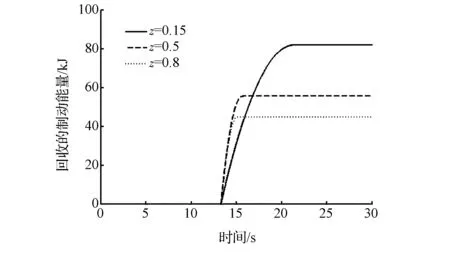
圖8 不同制動強度下制動能量回收曲線
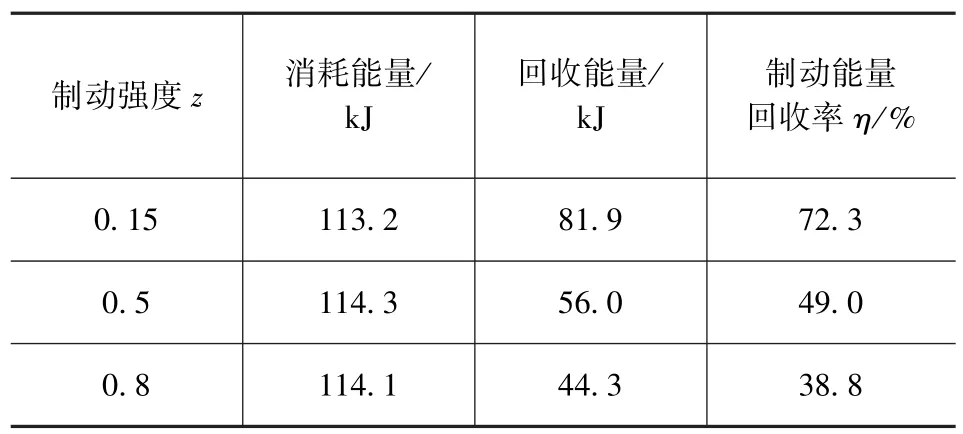
表2 不同制動強度下制動能量回收效果
4.2 美國公路UDDS循環工況仿真
為了更準確地驗證控制策略的可行性,特選取美國公路UDDS的典型循環工況進行仿真分析。表3為UDDS循環工況的主要數據。圖10為消耗和回收能量變化情況。從仿真結果可以看出,該循環工況下共回收制動能量 2 265kJ,需要消耗能量4 372kJ,回收率為51.8%。從而驗證了本文中所制定的控制策略能夠滿足在UDDS循環工況下的制動能量回收要求,提高了汽車續駛里程。

圖9 不同制動強度下的制動力矩變化曲線

表3 UDDS工況

圖10 消耗與回收能量變化曲線
4.3 80km/h初始速度緊急制動仿真
為了驗證本文中制定的防抱死策略的可行性,選取了多種車速在不同附著系數的路面上進行試驗,此處限于文章篇幅,特選取80km/h的初始速度在附著系數為0.5的路面上進行說明,仿真結果如圖11所示。結果表明,車速與前后輪輪速能夠較好的跟隨,符合制動穩定性的要求。
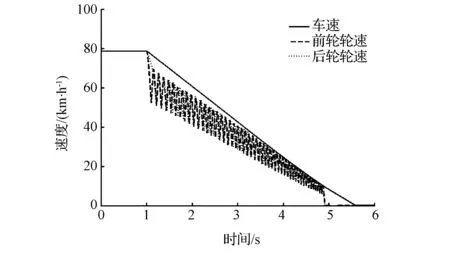
圖11 車速與輪速對比圖
5 結論
(1)基于傳統的液壓制動系統,在保留制動操縱機構的前提下,對其他部分進行了再次改造,加入了高壓蓄能器和回路控制閥。
(2)在重新設計制動系統結構的基礎上,制定了再生制動能量回收系統的控制策略,該策略考慮到ECE法規、電池SOC和電機約束等的影響,通過采用前后輪制動力按固定比例分配,電液制動力按模糊控制邏輯分配并修正的方法,達到制動能量回收的最大化。
(3)所提出的制動能量控制策略能夠在基本保持汽車行駛穩定性的條件下高效回收制動能量,減少了電動輪汽車的制動能量損失。
[1] KIM SH,KWON O J,HYON D,et al.Regenerative braking for fuel cell hybrid system with additional generator[J].International Journal of Hydrogen Energy,2013,38(20):8415-8421.
[2] ZHANG J, LIY, LV C, et al.New regenerative braking control strategy for rear-driven electrified minivans[J].Energy Conversion and Management,2014,82:135-145.
[3] 董鑄榮,梁松峰,田超賀.一種電動汽車輪轂電機再生制動試驗臺架的設計與實現[J].汽車技術,2012(8):54-56.
[4] 隋妮,王廣萍,李仲興,等.直流無刷電機再生制動系統試驗臺的設計與驗證[J].汽車技術,2011(1):49-53.
[5] 何仁,張瑞軍.輪轂電機驅動技術的研究與進展[J].重慶理工大學學報,2015,29(7):10-18.
[6] GAO Y,ESAKIM.Electronic braking system of EV and HEV—integration of regenerative braking,auto-matic braking force control and ABS[C].SAE Paper 2001-01-2478.
[7] GAO H,GAO Y,EHSANIM.A neural network based SRM drive control strategy for regenerative braking in EV and HEV[C].Electric Machines and Drives Conference,2001:571-575.
[8] CIKANEK SR.Electric vehicle braking system[C].Proceedings of the 14th International Electric Vehicle Symposium, Orlando,Florida, USA,1997.
[9] KO J, KIM J, LEE G.Development of co-operative control algorithm for parallel HEV with electric booster brake during regenerative braking[C].IEEE Vehicle Power and Propulsion Conference,2011:1-5.
[10] 初亮,柳帥,姚亮,等.混合動力客車氣壓與再生制動協調控制方法:201010511049[P].2010-5.
[11] 朱雅君.混合動力商用車再生制動及防抱死集成控制系統的研究[D].長春:吉林大學,2007.
[12] 呂廷秀.混合動力轎車再生制動與防抱死集成控制系統研究[D].長春:吉林大學,2007.
[13] 羅禹貢,李蓬,等.基于最優控制理論的制動能量回收策略研究[J].汽車工程,2006,28(4):356-360.
[14] 李蓬.輕度混合動力電動汽車制動能量回收控制策略研究[D].北京:清華大學,2005.
[15] 王鵬宇,王慶年,胡安平,等.基于Simulink-AMESim聯合仿真的混合動力客車再生制動系統分析[J].吉林大學學報(工學版),2008,38(S1):7-11.
[16] 王軍,熊冉,楊振遷.純電動大客車制動能量回收系統控制策略研究[J].汽車工程,2009,31(10): 932-937.
[17] 靳立強,王慶年,宋傳學.四輪獨立驅動電動汽車動力學控制系統仿真[J].吉林大學學報(工學版),2004,34(4):547-553.
[18] 苗軍.電動汽車再生制動控制策略研究[D].北京:北方工業大學,2011:17-23.
[19] 陳慶樟,何仁.汽車再生制動系統機電制動力分配[J].江蘇大學學報(自然科學版),2008, 29(5):394-397.
[20] 林輝.輪轂電機驅動電動汽車聯合制動的模糊自整定PID控制方法研究[D].長春:吉林大學,2013.
[21] CAO J,GAO B,CHENW,et al.Neural network self adaptive PID control for driving and regenerative braking of electric vehicle[C].IEEE Transactions on Industrial Electronics,2007,8:2029-2034.
[22] LIN H,SONG C.Simulation of hydraulic anti-lock braking system control based on a co-simulation model by AMESim and simulink[C].Transportation, Mechanical, and Electrical Engineering(TMEE), International Conference on Transportation,2011:775-778.
[23] 李進.基于AMESim-simulink的液壓混合動力轎車再生制動系統研究[D].重慶:重慶大學,2013.
A Research on Regenerative Braking Energy Recovery of Electric-wheel Vehicle Based on Fuzzy Control
Jin Liqiang1, Sun Zhixiang1, Wang Yi2& Zheng Ying3
1.Jilin University, State Key Laboratory of Automotive Simulation and Control, Changchun 130022;2.Computer Teaching Experimental Center, Information School, Yanshan University, Qinhuangdao 066004;3.HUAYU Automotive System Co., Ltd., Shanghai 200041
In order to enhance the energy recovery ratio of regenerative braking in the braking process of electric-wheel vehicle for saving energy,a set of electro-mechanical compound regenerative braking system and its control strategy with new configuration suitable for electric-wheel vehicle is proposed.In this control strategy,taking into account the influences of battery SOC and braking strength on the regenerative braking torque ofmotor,a fuzzy controller with two inputs and one output variable is designed.Then simulation models for a 15-DOF electric-wheel vehicle and its regenerative braking system and hydraulic brake system are established on AMESim platform,and an AMESim-Simulink co-simulation with UDDS driving cycles is conducted under different braking intensities.The results show that the control strategy formulated canmeet the requirements of effective recovery of regenerative braking energy while ensuring braking efficacy.
vehicle engineering; regenerative braking energy recovery; fuzzy controller; braking force distribution;co-simulation
10.19562/j.chinasae.qcgc.2017.10.001
?中國博士后基金(2013M540248)資助。
原稿收到日期為2016年7月18日,修改稿收到日期為2016年12月19日。
靳立強,教授,E-mail:jinlq@ jlu.edu.cn。
猜你喜歡
能源工程(2020年6期)2021-01-26 00:55:22
鐵道通信信號(2020年9期)2020-02-06 09:15:22
山東冶金(2019年3期)2019-07-10 00:54:04
數學大王·趣味邏輯(2019年5期)2019-06-13 20:27:43
小學科學(學生版)(2019年5期)2019-05-21 01:00:18
經濟技術協作信息(2018年30期)2018-11-22 06:20:24
消費導刊(2018年10期)2018-08-20 02:57:02
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
作文大王·低年級(2016年4期)2016-04-18 00:24:37
通信電源技術(2016年1期)2016-04-16 04:57:26
