艦船自動智能避碰數學模型及其仿真研究
2017-11-03 16:26:28鮑宏楊
艦船科學技術 2017年10期
鮑宏楊
(南通航運職業技術學院 航海系,江蘇 南通 226010)
艦船自動智能避碰數學模型及其仿真研究
鮑宏楊
(南通航運職業技術學院 航海系,江蘇 南通 226010)
為了提高艦船航行的安全和效率,達到最佳操船效果,需要建立艦船自動智能避碰數字模型。當前模型在分析艦船避碰風險度的基礎上,通過人工智能、進化計算和軟計算等方法實現艦船自動智能避碰,存在避碰識別準確率較低的問題。本文提出一種新的艦船自動智能避碰數學模型,首先對艦船會遇態勢進行判斷;然后建立預測艦船碰撞風險判斷模型,預測本艦船實施自動智能避碰方案后的復航時機是否已到,以及本艦船立即復航是否能夠讓清目標艦船或其他所有目標艦船;最后依據艦船碰撞風險判斷結果,以當前艦船潛在碰撞風險為例,建立艦船自動智能避碰數學模型。仿真結果證明,所提模型能夠實現艦船自動智能避碰。
艦船;自動;智能避碰;數學模型
文獻[8]提出了一種基于人工智能和軟計算的艦船自動智能避碰數學模型,該模型在分析艦船避碰風險度的基礎上通過人工智能和軟計算等方法建立艦船自動智能避碰數學模型,存在避碰識別準確率較低的問題。文獻[9]主要綜述了模糊神經網絡、人工智能系統和免疫算法等在艦船自動智能避碰中的應用,并在此基礎上建立了艦船自動智能混合避碰數學模型。該模型存在穩定性較差的問題。文獻[10]提出了一種基于擬態物理學算法的艦船自動智能避碰數學模型,首先將《國際海上避碰規則》中的相關條例作為約束性條件限定艦船避碰問題的可行域空間;然后計算艦船最近會遇舉例和航行損失的艦船避碰目標函數,通過迭代進化獲取艦船避碰全局最優解;最后利用擬態物理學算法建立艦船自動智能避碰數學模型。該模型存在避碰識別準確率較低,反應時間較慢的問題。
為了解決上述模型存在的問題,提高艦船航行的安全系數,提出一種新的艦船自動智能避碰數學模型,并通過仿真實驗證明,所提模型能夠實現艦船的自動智能準確避障,具有良好的應用價值。
1 艦船自動智能避碰數學模型研究
1.1 艦船會遇態勢判斷
為了實現艦船自動智能避碰,需要對艦船會遇態勢進行判斷,為后續判斷目標艦船是否存在潛在碰撞風險提供參考依據。具體操作過程如下:
假設Q艦船舷角表示目標艦船相對于本艦船的方位,由0°到180°向右或向左計量。?C表示目標艦船航向CT與本艦船航向CO之差,即?C=CT–CO。
根據《國際海上避碰規則》,艦船會遇態勢可以分為艦船對遇、艦船交叉相遇和艦船追越3種類型,通常情況下艦船碰撞態勢可以分為以下幾類:
1)艦船對遇態勢:當2艘艦船在相反或接近相反的航向上相遇至有構成碰撞風險的態勢,即Q≤5°,且?C 在 174°~186°之間。
2)艦船的右舷交叉相遇:2艘艦船首向交叉,且目標艦船位于本艦船右舷。根據艦船會遇角度不同還可以分為:
①艦船右舷小角度交叉相遇:Q<45°,且?C在186°~210°之間;
②艦船右舷大角度交叉相遇:Q<112.5°,且?C 在 210°~360°之間。
3)艦船的左舷交叉相遇:2艘艦船首向交叉,且目標艦船位于本艦船左舷。根據艦船會遇角度不同還可以分為:
①艦船左舷小角度交叉相遇:Q<45°,且?C在150°~174°之間;
②艦船左舷大角度交叉相遇:Q<112.5°,且?C 在 0°~150°之間。
艦船追越態勢:1艘艦船從其他艦船正橫后大于22.5°的某一方向趕上其他艦船時,即該艦船對所追越的艦船所處位置,在夜間智能看見被追越艦船的尾燈而無法看到其任意一個舷燈時,被認定是在追越中,即艦船目標 Q>112.5°,且?C 在 0°~90°或者 270°~360°之間,目標艦船速度Vt大于本艦船速度Vo。
艦船被追越態勢:Q<arcsin(0.924×Vt/Vo),且?C 在 0°~90°或者 270°~360°之間,目標艦船速度 Vt小于本艦船速度Vo。
假設d表示目標艦船相對于本艦船的距離,則本艦船在x,y軸上的速度矢量計算表達式為:

目標艦船在x,y軸上的速度矢量表示為:

本艦船與目標艦船的相對運動速度矢量計算公式如下:
1)在x,y軸上的相對運動速度矢量分別為

2)在x,y軸上的相對速度大小計算表達式為

3)在x,y軸上相對航行的速度為

當VyR<0時,α=180°;當VxR≥0時,分為2種情況,即 VxR>0 時,α=0°;VxR=0 時,α=360°。
目標艦船方位的計算表達式為

則目標艦船相對方位、目標艦船真方位以及本艦船航行關系的計算公式為

目標艦船與本艦船航向交叉角計算表達式為

根據上述計算結果,可以求出本艦船與目標艦船的轉向避碰決策DCPA和復航決策TCPA,其表達式分別如下:

式中:R為風險目標艦船與本艦船的距離。
1.2 預測艦船碰撞風險判斷模型
在對艦船會遇態勢分析的基礎上,建立預測艦船碰撞風險判斷模型,預測本艦船實施自動智能避碰方案后的復航時機是否已到,以及本艦船立即復航是否能夠讓清目標艦船或其他所有目標艦船(多目標艦船會遇情況)。詳細描述過程如下:
定義ZXFA代表艦船自動智能避碰執行方案的標識符,取 “0”代表艦船避碰方案形成以及實施前;取 “1”代表艦船避碰方案已經開始實施。
當ZXFA=0時

式中:SDA max[i]表示模糊邊界的外邊界,是計算艦船碰撞風險避碰幅度的依據;0.725×SDA max表示模糊邊界的內邊界,是判斷艦船潛在碰撞風險的閾值:SDA[i]表示基于當時艦船會遇態勢形成避碰方案時,考慮艦船密度等影響因素后各目標艦船和本艦船的實際安全會遇距離。
當ZXFA=1時

式中:i=1,2,…N,N表示目標艦船總數。SDA[i]的取值取決了艦船自動智能避碰方案安全水平safelevel的取值。
1.3 艦船自動智能避碰數學模型的建立
依據1.2節艦船碰撞風險判斷結果,以當前艦船潛在碰撞風險為例,建立艦船自動智能避碰數學模型。
假設WX代表當前風險目標艦船總數標識符;NWX代表預測艦船自動智能避碰方案存在新風險艦船目標總數標識符;WX[i]和NWX[i]分別代表當前目標艦船和預測目標艦船狀態標識符,取 “0”代表艦船沒有潛在碰撞風險,取 “1”代表艦船有潛在碰撞風險。以當前艦船潛在碰撞風險為例,建立艦船自動智能避碰數學模型,具體步驟如下:
1)假設N=1,滿足式(11),且ZXFA=0,或者滿足式(12),且ZXFA=1,則判斷目標艦船不存在潛在碰撞風險,設定WX[i]=0,轉到步驟4;
否則假設滿足上述式(13),且ZXFA=0,則判斷目標艦船存在潛在碰撞風險,設定WX[i]=1,滿足WX=WX+1,轉到步驟4;
否則假設滿足上述式(13),且ZXFA=1時,則說明目標艦船采取了避碰不協調行動,設定WX[i]=1,轉到步驟4;
否則轉到步驟2;
2)如果ZXFA=0,且N>1:
假設滿足上述式(13),則判定目標艦船存在潛在碰撞風險,設定WX[i]=1,WX=WX+1;
否則,設定WX[i]=0,轉下一循環,直到i=N,再轉到步驟4;
否則當ZXFA=1時,轉到步驟3;

3)假設滿足上述式(12)或者滿足上述式(13),且TC[i]≥TR、或者滿足上述式(13)且滿足以下條件:則認定為新進入艦船航行監測區域,存在潛在風險的目標艦船,但是暫時不會構成碰撞威脅,則判定該目標艦船不存在潛在碰撞威脅,設定WX[i]=0;
否則判斷該目標艦船存在碰撞風險,則設定WX[i]=1,WX[i]=0,轉到下一循環的潛在碰撞風險判斷,直到i=N,停止對各個目標艦船潛在碰撞風險的判斷,轉到步驟4;
4)根據風險艦船累積數量WX總體判斷是否存在碰撞風險;
假設WX=0:當ZXFA=0時,則對目標艦船進行分析;而當ZXFA=1時,則恢復艦船航向;
假設WX≠0:當ZXFA=1時,作出艦船自動智能避碰方案;當ZXFA=0時,則對艦船會遇態勢進行分析判斷、執行艦船自動智能避碰。
至此完成艦船自動智能避碰模型的建立。
2 實驗結果與分析
為了更好地開展艦船自動智能避碰模型研究,采取有效的計算機仿真實驗進行檢驗,解決單機仿真實驗難以檢驗目標艦船不協調情況下的自動智能避碰決策效果以及實際艦船試驗難度較大等問題,實驗引入大連海事大學自主研發的艦船操縱模擬器平臺,在此平臺基礎上,嵌入本文模型的動態鏈接庫,搭建 “艦船安全航行和自動智能避碰計算機仿真測試平臺”作為艦船自動智能避碰數學模型的測試設備,利用該平臺實現多目標艦船對抗自動智能避碰過程監控的仿真試驗。計算機仿真實驗平臺由控制臺PC機、5臺本艦船PC機組成,控制臺PC機與本艦船PC機間采用無線傳感網絡聯結。實驗過程中運用的艦船模型參數設置如表1所示。

表1 艦船模型參數設置Tab. 1 Parameters setting of ship model
2.1 模擬艦船對遇態勢的案例
海上天氣良好,艦船能見度大于8 nmile,微風(風速為5 kn,風向為000°),本艦船OS的坐標為51°11.726'N 5.014'W,艦船航向為000°,艦船航速為14.8 kn,目標艦船 TG的坐標為 51°15.068'N 10°5.012'W,艦船航向為180°,艦船航速為16.7 kn,2艘艦船之間的距離為3.408 nmile,DCPA為0.152 nmile,TCPA為6.5 min,目標艦船TG與本艦船OS的相對航行速度為20.7 kn,2艘艦船構成對遇態勢。根據《國際海上避碰規則》2艘艦船互為避讓關系,都需要采取避讓行為,當2艘艦船距離為2.78 nmile時,模型計算艦船碰撞風險系數CRI達到0.672,此時,模型開始調用艦船自動智能避碰方案:本艦船OS以右舵6.8°,持續到艦船的ROT到達10.8°/min時,進行回舵,把定操作,此時的艦船改向為9.6°,目標艦船TG以右舵5°,持續到艦船的ROT到達11.7°/min時進行回舵,把定操作,此時的艦船改向為191.6°,模型通過試驗以上自動智能避碰方案,實現艦船的成功避讓。模型運行過程中的DCPA和CRI變化的歷時曲線如圖1所示。設CRI的單位為H。
2.2 艦船追越態勢仿真試驗
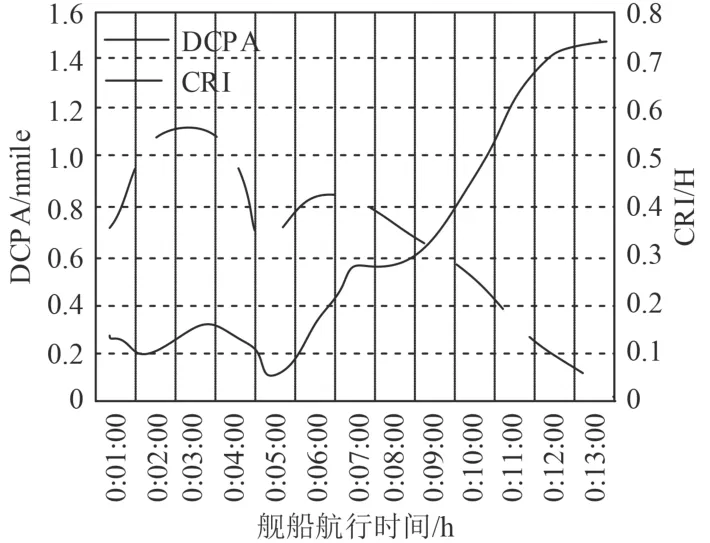
圖1 DCPA和CRI變化的歷時曲線Fig. 1 The diachronic curve of DCPA and CRI
本艦船OS的坐標為51°11.786'N 5.004'W,艦船航向為357°,艦船航速為19.8 kn,目標艦船TG的坐標為 51°12.828'N 10°5.092'W,艦船航向為 000°,艦船航速為7.8 kn,2艘艦船之間的距離為11.2 nmile,DCPA為0.01 nmile,TCPA為5.6 min,目標艦船TG與本艦船OS的相對航行速度為11.7 kn,2艘艦船構成追越態勢。本艦船OS為追越艦船,本艦船位于目標艦船右舷并從目標艦船右舷追越目標艦船船首,2艘艦船之間構成碰撞危險,根據《國際海上避碰規則》2艘艦船互為避讓關系,本艦船OS采取避讓行為,根據計算艦船碰撞風險系數CRI達到0.628,此時,模型開始調用艦船自動智能避碰方案:本艦船OS以本艦船OS以右舵6.8°,持續到艦船的ROT到達14.8°/min時,進行回舵,把定操作,此時的艦船改向為9.8°,目標艦船TG以右舵5°,持續到艦船的ROT到達11.7°/min時進行回舵,把定操作,此時的艦船改向為191.6°,模型通過試驗以上自動智能避碰方案,實現艦船的成功避讓。模型運行過程中DCPA和CRI變化的歷時曲線如圖2所示。
2.3 艦船交叉態勢仿真實驗
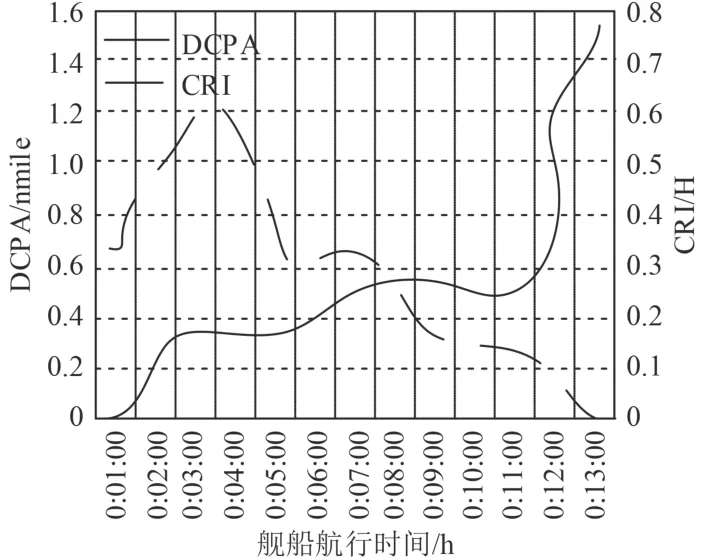
圖2 DCPA和CRI變化的歷時曲線Fig. 2 The diachronic curve of DCPA and CRI
本艦船OS的坐標為51°11.786'N 5.004'W,艦船航向為357°,艦船航速為12.3 kn,目標艦船TG的坐標為 51°12.502'N 10°2.892'W,艦船航向為 300°,艦船航速為14.8 kn,2艘艦船之間的距離為1.586 nmile,DCPA為0.173 nmile,TCPA為7.06 min,目標艦船TG與本艦船OS的相對航行速度為12.7 kn,目標艦船TG位于本艦船真方位右舷62.2°,2艘艦船構成交叉態勢,2艘艦船之間構成碰撞危險,根據《國際海上避碰規則》目標艦船TG保持航向和航速,本艦船OS需要采取避讓行為,本艦船向右轉向,過目標艦船船尾。計算艦船碰撞風險系數CRI達到0.64,此時,模型開始調用艦船自動智能避碰方案:本艦船OS以本艦船OS以右舵14.8°,持續到艦船的ROT到達20.8°/min時,進行回舵,把定操作,此時的艦船改向為24°,模型通過試驗以上自動智能避碰方案,實現艦船的成功避讓。模型運行過程中DCPA和CRI變化的歷時曲線如圖3所示。
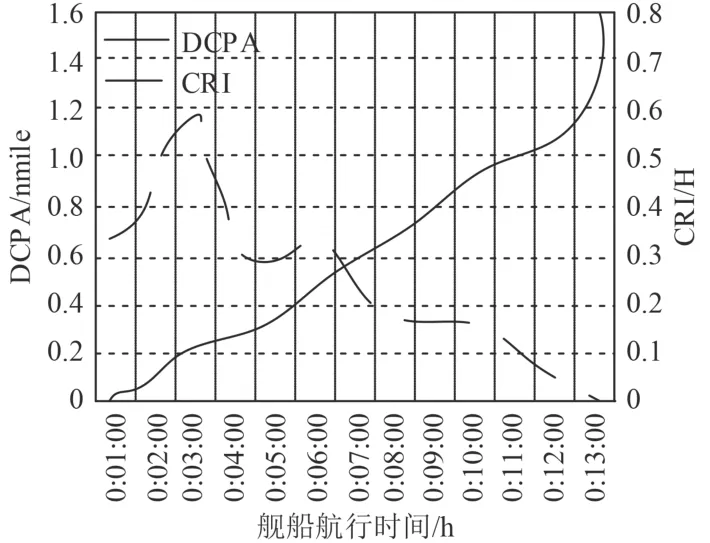
圖3 DCPA和CRI變化的歷時曲線Fig. 3 The diachronic curve of DCPA and CRI
2.4 多艦船會遇態勢仿真實驗
本艦船OS的坐標為51°11.676'N 5.003'W,艦船航向為000°,艦船航速為16.2 kn,目標艦船TG的坐標為51°13.402'N3.792'W,艦船航向為213°,艦船航速為14.5 kn,與本艦船OS距離13.937 nmile,本艦船真方位右舷23.6°,DCPA為0.248 nmile,TCPA為3.936 nmile,目標艦船TG2位于51°13.392'N10°6.292'W,目標艦船的航向為150°,航速為14.2 kn,與本艦船OS之間的距離為1.948 nmile,目標艦船真方位左舷335.2°,DCPA為0.369 nmile,TCPA為3.878 min。本艦船OS與目標艦船TG1和目標艦船TG2均構成交叉碰撞危險。本艦船OS與目標艦船TG1和目標艦船TG2分別采取右讓和左讓的自動智能避碰決策。由此可知,本艦船OS智能采取保持航向,降低航速;目標艦船TG1和目標艦船TG2則分別采取左讓和右轉避讓決策。此時,模型開始調用艦船自動智能避碰方案:本船車鐘由Full Ahead(100.3 rpm)對應艦船航速16.2 kn降至Slow Ahead(70.2 rpm)對應航速12.3 kn,目標艦TG1向左轉向30°,其航向調整為185°(避碰模型建議:左舵16°,持續到ROT到達23°/min時,進行回舵,把定操作,此時目標艦船TG1改向為185°);目標艦船TG2向右轉向25°,航向方向調整為175°(避碰模型建議:右舵13°,持續到ROT到達28.9°/min時,進行回舵,把定操作,此時目標艦船TG1改向為175°)。模型通過試驗以上自動智能避碰方案,實現艦船的成功避讓。模型運行過程中DCPA和CRI變化的歷時曲線如圖4所示。

圖4 DCPA和CRI變化的歷時曲線Fig. 4 The diachronic curve of DCPA and CRI
3 結 語
采用當前模型對艦船自動智能避碰對潛在碰撞風險分析的不全面,使得避碰決策執行不協調,為此提出一種新的船舶自動智能避碰數學模型,并通過計算機仿真實驗對船舶自動智能避碰數學模型進行檢驗,證明了所提模型的有效性。對航海的自動化技術提供了可靠保證。
[1]陳姚節, 李爽, 范桓, 等. 基于速度矢量坐標系的多船自動避碰研究[J]. 計算機仿真, 2015, 32(6): 420–424.
CHEN Yao-jie, LI Shuang, FAN Huan, et al. Automatic collision avoidance of multi-ships based on velocity vector coordinate[J]. Computer Simulation, 2015, 32(6): 420–424.
[2]管小清, 常青, 梁冠豪, 等. 一種冗余機械臂的多運動障礙物避障算法[J]. 計算機測量與控制, 2015, 23(8): 2802–2805.
GUAN Xiao-qing, CHANG Qing, LIANG Guan-hao, et al.Multiple mobile obstacles avoidance algorithm for redundant manipulator[J]. Computer Measurement & Control, 2015,23(8): 2802–2805.
[3]尹新城, 胡勇, 牛會敏. 未知環境中機器人避障路徑規劃研究[J]. 科學技術與工程, 2016, 16(33): 221–226.
YIN Xin-cheng, HU Yong, NIU Hui-min. Path planning study for robot obstacle avoidance in unknown environment[J].Science Technology and Engineering, 2016, 16(33): 221–226.
[4]周愷. 信息素模糊邏輯導引的機器人室內避障算法[J]. 科技通報, 2015, 31(12): 220–222.
ZHOU Kai. Indoor robot obstacle avoidance algorithm introduction of pheromone fuzzy logic guidance[J]. Bulletin of Science and Technology, 2015, 31(12): 220–222.
[5]劉彥戎. 基于STC89C51RC單片機的智能遙感避障小車的系統設計[J]. 電子設計工程, 2017, 25(3): 45–48.
LIU Yan-rong. Design of intelligent obstacle avoidance car remote sensing system based on STC89C51RC microcontroller[J]. Electronic Design Engineering, 2017, 25(3): 45–48.
[6]曹海. 人工免疫算法的船舶避碰智能策略研究[J]. 艦船科學技術, 2016, 38(2): 10–12.
CAO Hai. Research on intelligent strategy of ship collision avoidance of artificial immune algorithm[J]. Ship Science and Technology, 2016, 38(2): 10–12.
[7]賀益雄, 黃立文, 牟軍敏, 等. 交叉相遇局面讓路船自動避碰行動方案[J]. 哈爾濱工程大學學報, 2015(8): 1024–1029.
HE Yi-xiong, HUANG Li-wen, MOU Jun-min, et al. A scheme for automatic collision avoidance of a give-way vessel in the crossing situation[J]. Journal of Harbin Engineering University, 2015(8): 1024–1029.
[8]熊勇, 賀益雄, 黃立文. 基于速度障礙的多船自動避碰控制方法[J]. 中國航海, 2015, 38(3): 46–51.
XIONG Yong, HE Yi-xiong, HUANG Li-wen. Multi-ship collision avoiding control considering velocity obstacle[J].Navigation of China, 2015, 38(3): 46–51.
[9]呂紅光, 尹勇, 尹建川. 混合智能系統在船舶自動避碰決策中的應用[J]. 大連海事大學學報, 2015, 41(4): 29–36.
LV Hong-guang, YIN Yong, YIN Jian-chuan. Application of hybrid intelligent systems in automatic collision avoidance decision-making for ships[J]. Journal of Dalian Maritime University, 2015, 41(4): 29–36.
[10]吳蓓. 船舶避碰中灰色數據挖掘研究[J]. 艦船科學技術,2016, 38(9A): 151–153.
WU Bei. The research of gray data mining algorithm in the ship collision avoidance system [J]. Ship Science and Technology, 2016, 38(9A): 151–153.
Research on automatic mathematical model of ship's automatic intelligent collision and its computer simulation
BAO Hong-yang
(Department of Navigation, Nantong Vocational and Technical Shipping College, Nantong 226010, China)
In order to improve the safety and efficiency of ship navigation, to achieve the best boat effect, the need for ship automatic intelligent collision avoidance digital model to study. Based on the analysis of the risk of collision avoidance,the current model can realize the automatic collision avoidance of ships by means of artificial intelligence, evolutionary computation and soft computing. There is a problem that the accuracy of collision avoidance is low. In this paper, a new mathematical model of automatic collision avoidance of ships is proposed. First, the situation of ship encounters is judged. Then, the ship collision risk judgment model is established to predict the recovery of the ship after the automatic intelligent collision avoidance whether the ship has arrived, and whether the ship can be re-deployed immediately to clear the target ship or all other target ships. Finally, according to the ship collision risk judgment results, the current ship potential collision risk, for example, the establishment of ship automatic intelligence collision mathematical model. Computer simulation experiments show that the proposed model can achieve the ship automatic intelligent collision avoidance.
ship;automatic;intelligent collision avoidance;mathematical model
U675
A
1672 – 7649(2017)10 – 0164 – 06
10.3404/j.issn.1672 – 7649.2017.010.033
0 引 言
隨著現代科技的不斷發展和進步,特別是計算機技術、傳感器技術、人工智能技術以及模糊數學理論的發展,航海技術發生了重大變革[1–2]。世界航運經濟得到迅猛發展,艦船總量的日趨增加,艦船航行速度的不斷提升是艦船安全航行面臨的巨大挑戰,同時也對艦船航行的自動化和智能化發展起到了推動性作用[3–4]。相比較早期艦船航行的導航系統功能較為單一,現代化艦船裝備精良,但是在艦船航行過程中,艦船之間的碰撞、艦船擱淺、艦船觸礁等海洋事故仍舊頻發。這些頻頻發生的海洋事故除了造成大量人員傷亡之外還造成現代海洋生態系統破壞[5]。通過分析這些海洋事故發生的數據可知,除了一些外在不可抗力引發的海洋事故之外,艦船碰撞事故發生的概率還在持續增長[6]。據可靠數據統計,96%以上的艦船碰撞海洋事故是由于艦船值班駕駛員沒能嚴格遵守《國際海上避碰規則》導致的。為了提高艦船航行的安全和效率,達到最佳操船效果,需要對艦船自動智能避碰數字模型進行研究。當前的艦船自動智能避碰數學模型主要將可拓學與避碰學相結合[7],實現艦船自動智能避碰,存在實際應用性能較差的問題。
2017 – 06 – 14
鮑宏楊(1979 – ),男,碩士,講師,研究方向為船舶避碰與導航、航海職業教育。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
表面工程與再制造(2019年6期)2019-08-24 06:40:04
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
商周刊(2018年18期)2018-09-21 09:14:46
光學精密工程(2016年6期)2016-11-07 09:07:19
