基于機器人的溫室大棚環境智能監控系統
2017-10-27 14:08:10劉艷昌孫華吳紀紅
江蘇農業科學 2017年16期
關鍵詞:智能化
劉艷昌 孫華 吳紀紅
摘要:針對溫室大棚有線監控系統存在布線困難、勞動力成本高和無線監測點移動性差等問題,設計一種以機器人為移動監測點,以Kingview 655軟件為上位機開發平臺的溫室大棚環境智能監控系統。該系統采用現場可編程門陣列((field-programmable gate array,簡稱FPGA)控制板作為采集控制終端,結合多路傳感器實現對機器人的行走控制和各環境參數的實時采集、處理、顯示、存儲及監測報警等功能,并通過APC220無線模塊將處理后的數據傳給上位機,上位機根據用戶設定參數范圍值,通過APC220無線模塊發送相關設備的啟/停控制命令,實現環境參數的遠程控制。同時,管理人員也可以借助通用分組無線服務(general packet radio service,簡稱GPRS)模塊和手機終端,實現查詢環境參數和控制設備等功能。結果表明,該系統具有運行穩定、采集精度高、易于控制、成本低廉等優點,能滿足溫室大棚監控的智能化需求。
關鍵詞:機器人;現場可編程門陣列;溫室監控;通用分組無線服務;組態技術;手機終端;智能化
中圖分類號: TP273+5文獻標志碼:
文章編號:1002-1302(2017)16-0214-05
[HJ14mm]
收稿日期:2016-04-13
基金項目:河南省科技攻關計劃(編號:132102310030);河南省高等學校重點科研項目(編號:15A413014、16A510017);河南科技學院大學生創新訓練項目(編號:2015CX062)。
作者簡介:劉艷昌(1979—),男,河南鶴壁人,碩士,講師,主要從事智能控制與信息檢測技術研究。E-mail:523401923@qqcom。
通信作者:李國厚,博士,教授,主要從事計算機控制、無損檢測、信號處理技術研究。E-mail:527636704@qqcom。[HJ]
隨著計算機、電子、人工智能技術的飛速發展和人們生活水平的提高,人們對反季節蔬菜、水果、花卉等農產品提出了更高的要求,并且隨著農業低效高耗的增長方式的轉變,對生產溫室的需求逐年上升[1-2]。但隨著社會的不斷進步,勞動力成本的不斷上升,這就要求轉變溫室的生產和管理模式,積極引導傳統產業向智能化、科技化、信息化方向發展,提高傳統溫室產業的科技含量[3],而溫室機器人的應用改變了傳統的農業勞動方式,克服了傳統溫室大棚有線監控系統存在布線困難、生產勞動力不足、水資源浪費、無線監控系統監測點多、移植性差、成本高等問題。因此,筆者設計開發一套以機器人為移動終端,以現場可編程門陣列(FPGA)控制器、傳感器、無線傳輸模塊和執行機構為硬件核心,以Kingview 655軟件為開發平臺的機器人溫室智能監控系統。
1溫室大棚環境智能監控系統總體方案
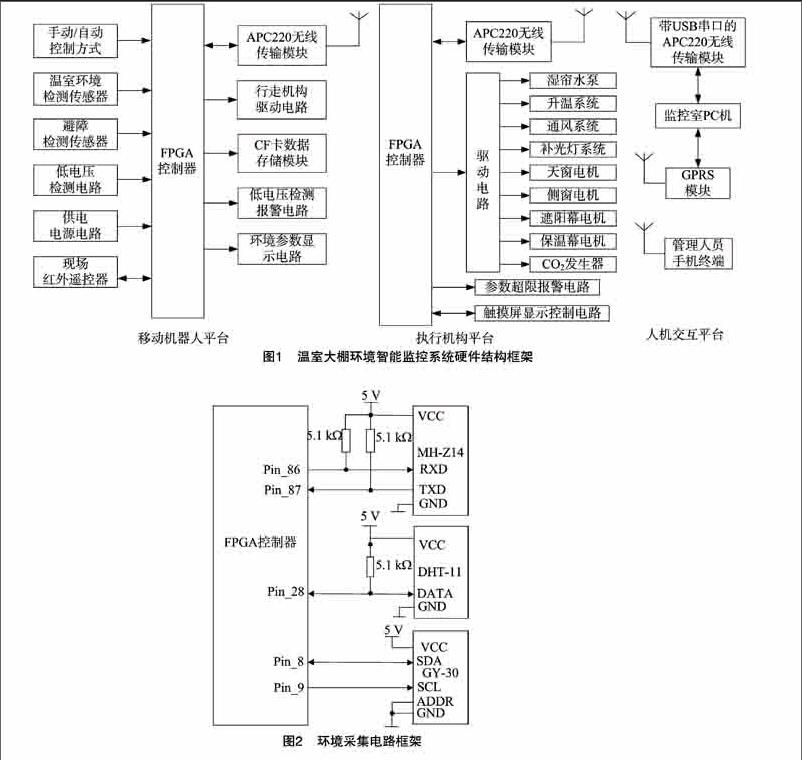
該系統主要由移動機器人平臺、執行機構平臺和人機交互平臺組成,硬件結構如圖1所示。
該系統以移動機器人為監測點,具有手動和自動2種控制方式。在手動控制方式下,工作人員可以通過紅外遙控器、現場觸摸屏、手機短信或監控室個人計算機(personal computer,簡稱PC)的手動控制畫面上相關操作按鍵對機器人行走和現場執行機構進行啟/停控制,進而改變溫室環境參數,達到滿足植物最佳的生長條件。在自動控制方式下,采用安裝在車載上的避障傳感器(攝像頭、超聲波、紅外、接觸傳感器)獲取溫室內障礙物信息,經FPGA控制器對獲得的障礙物信息進行分析判斷后,根據避障控制策略和算法作出相應的避障決策,從而實現機器人的行走避障功能,同時無線模塊ACP220將獲得的障礙物信息發送給PC,以便用戶操作和查詢;采用安裝在車載上的溫室環境檢測傳感器(溫濕度、光照、二氧化碳傳感器)獲取室內環境參數值, 并將獲得的參數信息通過無線模塊ACP220發送給PC,PC將接收到的參數值與管理技術人員預先設定的植物最佳生長環境參數范圍進行比較,若在設定范圍內,則執行各機構維持當前狀態,若有參數在設定范圍之外,則發出相關超限報警信號,同時PC通過帶串口APC220無線傳輸模塊將相關執行機構的啟/停控制指令傳給執行機構平臺中的FPGA控制器來實現溫室環境的智能控制。
11溫室大棚環境智能監控系統硬件設計
111控制器
該系統FPGA控制器采用杭州康芯電子有限公司推出的KX2C5F+型開發板,核心芯片為EP2C5T144,具有內部各功能模塊相互獨立、引腳豐富、編程靈活、并行處理數據快、易于設計電路擴展等優點。
112環境采集電路設計
該系統主要對大棚溫室內溫濕度、CO2濃度和光照度進行實時采集。其中,溫濕度傳感器采用1-Wire總線接口、數字輸出溫度和濕度集為一體的DHT11傳感器;光照度傳感器采用兩線式串行總線接口、數字信號輸出的GY-30型檢測模塊傳感器;CO2濃度傳感器采用紅外MH-Z14型傳感器,數據傳輸采用UART通信協議,為使發送和接收采集數據線閑置時狀態為高電平,通信線上須外接51 kΩ的上拉電阻[4]。環境采集電路框架如圖2所示。
113移動機器人終端控制電路設計
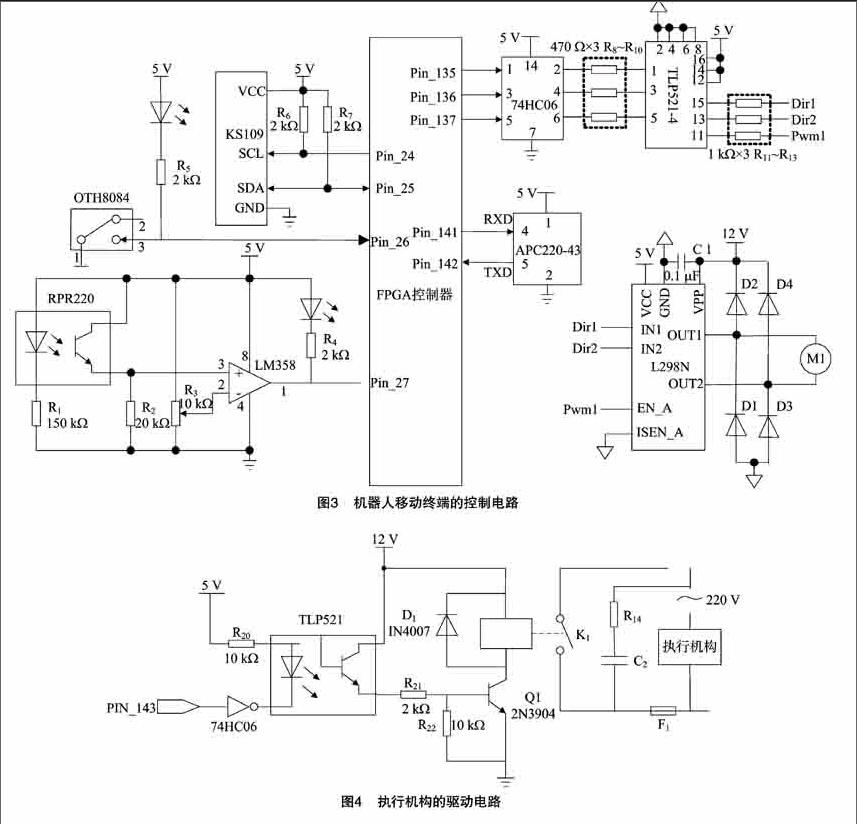
為提高機器人在溫室內的移動靈活性、快速性、穩定性,移動機器人采用前后2個萬向輪和左右2個驅動輪的四輪輪式結構。在機器人的左右2個輪上分別安裝2個獨立的驅動電機,通過控制左右輪的速度差來實現車體轉向,通過改變步進電機的輸入脈沖頻率控制調速,實現機器人的前進、左轉、右轉、后退以及調頭等功能。采用避障傳感器來獲取機器人周邊的障礙物信息,其中安裝在機器人前端的1路超聲波傳感器KS109和左右兩側各安裝3路等間距的紅外傳感器RPR220用來獲取機器人前方障礙物距離和兩側障礙物的方位信息,以便于實現路徑的合理規劃;安裝在機器人左前、左后、右前和右后方4路接觸傳感器OTH8084將獲取任一個方向上的碰撞信息反饋到
FPGA[CM(235]控制器,以便作出避障決策;安裝在機器人上的APC220-43無線模塊將檢測溫室環境參數和障礙物信息發送到監控室PC上,以便于技術人員查閱環境信息以及對現場設備啟/停和機器人行走控制。為增強FPGA控制器輸出端的驅動能力,在現場FPGA控制器的輸出端接74HC06芯片;為避免驅動電路對FPGA控制器輸出信號的干擾,在FPGA控制器與電機驅動電路LN298N之間加入光電耦合器TLP521[5-6];為消除電機在啟停、制動及換向時產生的反電動勢對電機的損壞,在驅動電路L298N和電機之間串入4個(D1~D4)高速大電流肖特基二極管;為改變驅動輪電機的調速控制,可以改變FPGA控制器引腳Pin_137輸出的PWM脈沖占空比來實現。機器人移動終端控制電路如圖3所示。
114驅動電路
執行機構驅動電路如圖4所示。光耦TLP521能夠有效抑制繼電器觸點通斷時線圈兩端產生的較大感應電動勢對FPGA控制器的輸出信號干擾;續流二極管IN4007為JQC-3FF-S-HZ繼電器斷電時提供釋放回路,避免反向電動勢過高擊穿驅動三極管Q1[8];為延長繼電器觸
點壽命在其兩端并聯由R14和C2構成阻容電路,同時串入保險絲F1防止電流過大燒壞執行設備和觸點[9]。
12溫室大棚環境智能監控系統軟件設計
121下位機軟件設計
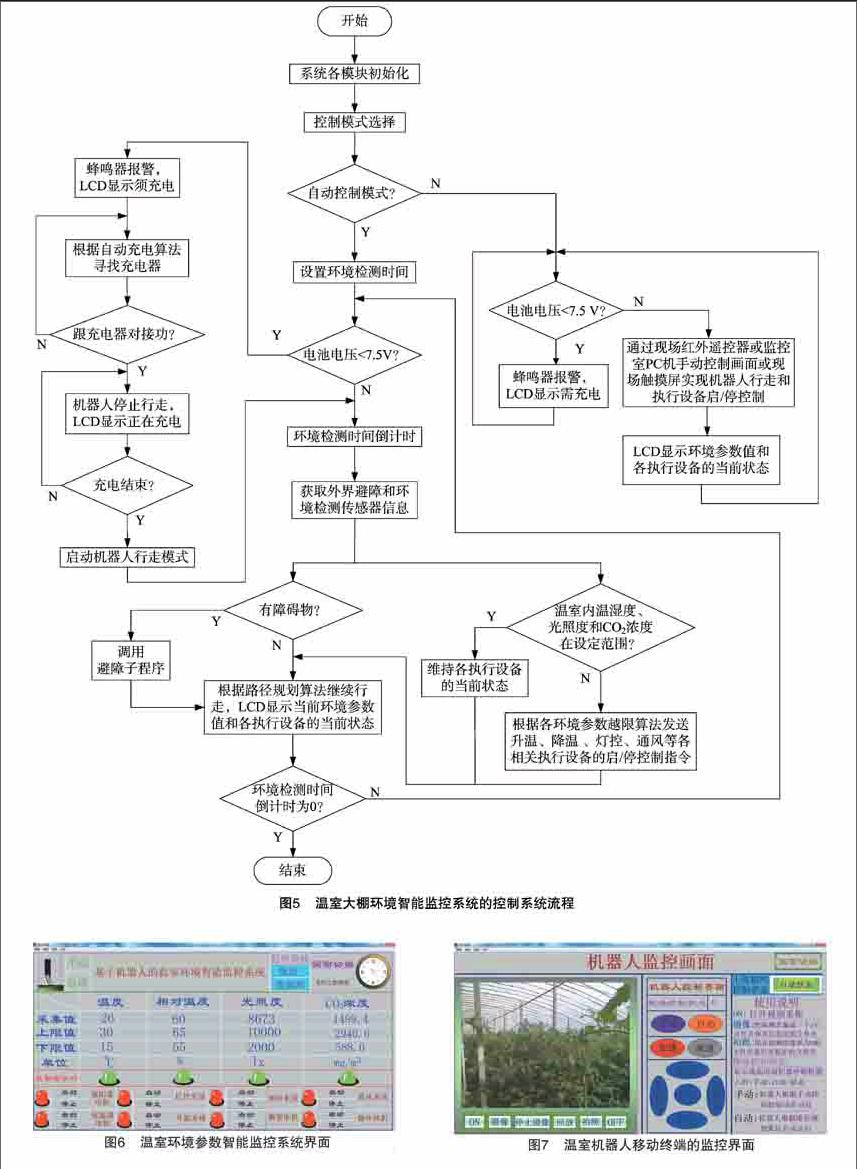
利用Quartus Ⅱ 90軟件開發平臺和verilog HDL編程語言實現避障傳感器、環境檢測傳感器、APC220-43無線傳輸模塊和各執行設備控制的模塊化編程。溫室控制系統流程如圖5所示。
122上位機軟件設計
溫室環境參數智能監控系統界面如圖6所示。上位機監控室PC采用Kingview 655組態軟件實現對上位機監控界面和數據分析的設計,該監控畫面能準確實時顯示采集到的溫室環境參數值和執行機構的運行狀況,當參數值不在設定范圍,則對應報警指示燈閃爍,并將相關設備的啟/停控制指令通過APC220-43發送至下位機,從而實現溫室環境的自動控制(圖6)。同時,管理人員也可在手動或自動控制模式下實現環境參數設置,具有查詢實時數據和歷史數據等功能。
溫室機器人移動終端監控界面如圖7所示。管理人員結合監控室PC上組態軟件和視頻監控,通過點擊機器人控制界面相關按鈕或在現場借助紅外遙控器相關按鍵,實現機器人的自動和手動運行控制功能。當現場控制狀態為0時,上位機可以控制機器人的運行狀態,而現場遙控器不起作用;反之,當現場控制狀態為1時,現場遙控器可以控制機器人的運行狀態,而上位機機器人控制界面不起作用。
除在監控室和現場對溫室環境參數實時檢測和執行機構啟/停控制外,管理人員也可借助GPRS模塊、移動網絡和手機終端實現對溫室環境參數進行數據查詢、范圍設定、執行設備控制等功能。當用戶通過手機向PC連接的GPRS模塊DTP_S09發送“環境參數數據查詢”指令后,即可收到當前環境參數值,如圖8短信發送和接收信息界面中“發信內容”所示[CM(25]。 管理人員也可發送“濕簾水泵啟/停”等執行設備控制指令來實現溫室環境的遠程監控等功能,同時管理人員也可通過選擇索引號刪除對應短信或點擊查詢全部按鈕在數據庫中查詢以前收到的短信時間和內容。
2結果與分析
為驗證該系統的可行性、有效性、實用性,該系統以種植蝴蝶蘭中苗期為研究對象,在校產學研花卉溫室種植基地進行測試。
從表1可知,白天(08:00—19:00)溫度變化范圍為 250~300 ℃,平均值為274 ℃,波動范圍為-24~26 ℃;夜里(20:00至次日07:00)溫度變化范圍為183~228 ℃,平均值為201 ℃,波動范圍為-18~27 ℃;與蝴蝶蘭生長所需最佳白天溫度為27 ℃、夜間溫度為20 ℃相比,上下波動較小,且晝夜溫差保持在5~8 ℃之間,有利于蝴蝶蘭所需養分的積累、健壯生長和葉色純正;24 h內空氣相對濕度變化范圍為652%~750%,平均相對濕度為705%,波動范圍在-53%~45%之間,能自動維持溫室內空氣相對濕度在65%~75%之間,有利于蝴蝶蘭植株生長、保持葉面水分、防止病害發生等;24 h內溫室CO2濃度控制在 8136~1 8606 mg/m3之間,且CO2平均濃度為1 4022 mg/m3,有利于促進蝴蝶蘭光合作用,提高產量和增加抗病性能;24 h內溫室光照度控制在10 042~20 000 lx之間,平均光照度為15 5484 lx,與蝴蝶蘭中苗(待緩苗)生長發育最適宜的光照度 15 000 lx 處相比,上下波動較小,光照度比較穩定,有利于蝴蝶蘭獲取充足養分、生根和葉片生長。
3結論
針對溫室環境參數較難控制、勞動強度高和養殖員工對高溫高濕環境不適應等問題,設計開發一種以機器人為移動監測點,以組態軟件為上位機開發平臺的智能溫室環境監控系統。該系統通過移動機器人、執行機構和人機交互三大平臺,結合路徑規劃、避障、多傳感器融合和環境參數超限4種算法實現機器人合理行走、數據處理、傳輸和現場設備遠程控制等功能,有效提高了溫室環境監控的智能化、信息化管理水平。同時,管理人員也可以借助上位機數據庫或手機終端隨時查詢不同季節、不同品種、不同階段植物的生長特點和管理規律,為種植戶來年獲得更高的經濟效益提供科學依據。經該河南科技學院產學研花卉溫室種植實驗基地實測結果表明,智能溫室環境監控系統具有工作性能穩定可靠、采集數據
實時性、準確性好、操作簡單、抗干擾能力強、成本低等特點,相比以往種植蝴蝶蘭產量提高23%、能源成本節約10%、死亡率降低15%、人力成本節約70%,證實了該系統的可行性和實用性,避免了人工操作的主觀性和隨意性,在農牧業領域具有較高的推廣應用價值。
[HS25]參考文獻:[HJ187mm]
張衛東 我國溫室發展的現狀及發展建議[J] 科技信息,2013(10):439
胡剛毅,榮劍,岳曉光 基于FPGA的農林業環境監測機器人系統設計[J] 農機化研究,2013(7):124-126
[3]賈士偉,李軍民,邱權,等 溫室自動化與機器人的應用[J] 北方園藝,2015(14):194-196
[4]溫竹,李士軍,張文軍,等 基于JN5148的溫室CO2濃度監測系統[J] 中國農機化學報,2014,35(2):259-262
[5]李運國 基于FPGA的兩輪機器人運動控制系統設計[D] 哈爾濱:哈爾濱工程大學,2013
[6]于笑凡 基于FPGA的中央空調管道清洗機器人設計[J] 儀表技術,2011(11):37-39
[7]錢思 清潔機器人系統設計與智能避障問題的研究[D] 武漢:華中科技大學,2009
[8]仲會娟 基于FPGA的太陽能熱水器全功能控制器的研究[D] 天津:河北工業大學,2012
[9]潘書俊,賈蘭英,李麗花,等 基于nRF905的雞舍溫濕度采集系統[J] 農機化研究,2012(6):173-175,214
猜你喜歡
軍事文摘(2022年19期)2022-10-18 02:41:14
建材發展導向(2021年13期)2021-07-28 07:14:34
建材發展導向(2021年10期)2021-07-16 07:13:24
印刷工業(2020年4期)2020-10-27 02:46:02
印刷工業(2020年4期)2020-10-27 02:45:52
中國儲運(2019年5期)2019-05-15 09:37:40
能源(2018年10期)2018-12-08 08:02:52
汽車觀察(2018年10期)2018-11-06 07:05:08
中國交通信息化(2017年4期)2017-06-06 07:21:52
中國公路(2017年12期)2017-02-06 03:07:25
