MEMS冗余慣組小幅值故障檢測的PCA算法設計和優化
2017-10-11 13:11:51李保國陳克川
導航與控制 2017年5期
韓 強,李保國,陳克川
(北京航空航天大學,北京100191)
MEMS冗余慣組小幅值故障檢測的PCA算法設計和優化
韓 強,李保國,陳克川
(北京航空航天大學,北京100191)
當組成冗余慣組的陀螺為MEMS陀螺,而故障又為幅值比較小的階躍故障時(仿真發現,階躍故障幅值為陀螺噪聲方差的10倍左右大小時),使用以往的PCA故障檢驗方法,陀螺噪聲會造成故障檢測的困難。針對這種情況,提出了MEMS冗余慣組小幅值故障檢測的PCA(Principal Component Analysis)算法設計和優化的方法,在以往PCA算法的基礎上結合假設檢驗算法,考慮了陀螺噪聲的影響,降低了MEMS陀螺噪聲對故障檢測的影響。通過仿真驗證,證實了本文算法比以往PCA算法具有更高的檢測準確性和靈敏度,這對于提高整個系統的可靠性具有重要意義。
故障檢測算法;假設檢驗;MEMS冗余慣組;PCA算法
Abstract:When the composition of redundant IMU is MEMS gyroscope and is small amplitude step fault(simulation finds that step fault magnitude about 10 times the variance of noise in gyro),the noise of the gyro will cause the difficulty of fault detection if using previous PCA fault detection method.To solve this problem,this paper proposes MEMS redundant inertial measurement for small value of the fault detection of PCA algorithm design and optimization.This measure adds hy?pothesis testing algorithm based on previous PCA algorithm,through considering the influence of the gyro noise,which re?duces the effect of noise of MEMS gyroscope of fault detection.The simulation results proved that this algorithm has higher detection accuracy and sensitivity than the previous PCA algorithm,which has great significance for improving the reliability of the whole system.
Key words:fault detection algorithm;hypothesis test;MEMS redundant group;PCA algorithm
0 引言
隨著導航系統技術的發展,冗余慣組得到了越來越廣泛的應用[1?5],相應的故障檢測方法也越來越完善。比如:Chen和Patton在1999年提出的PCA(Principal Component Analysis)故障檢測方法,在一定程度上實現了故障檢測。但是這個方法在載體有大的角運動時會存在檢測困難,文獻[6]提出了改進的PCA算法,將PCA算法和Potter算法結合起來。相比傳統的PCA算法,該算法區分了系統角運動和故障,在一定程度上提高了系統的故障檢測水平。但是這兩種算法都沒有考慮陀螺噪聲的影響[7],當組成慣組的陀螺是MEMS陀螺,而故障又為幅值比較小的階躍故障時(仿真發現,階躍故障幅值為陀螺噪聲方差的10倍左右大小時),陀螺噪聲會造成故障檢測的困難。如使用0.05(°)/s的 MEMS 陀螺時,其噪聲方差約為0.03(°)/s,那么使用以往方法對 0.3(°)/s 的階躍故障檢測就會存在困難。由于濾波使陀螺輸出丟失部分數據,這會給故障檢測和后續導航帶來誤差,尤其是IMU輸出高動態信息時,濾波會造成誤檢,所以要求故障檢測函數自身具有抑制噪聲的能力。
假設檢驗是故障檢測的方法之一,它的優勢在于考慮了陀螺噪聲特性的影響。本文將假設檢驗和改進的PCA算法相結合,用于故障檢測,降低了陀螺噪聲對于故障檢測的干擾,使得冗余慣組的故障檢測更加及時準確[8]。
1 傳統PCA算法
傳統PCA算法是通過訓練過程對系統的特性進行描述,并且按照系統本身的重要程度將重要的部分保留下來,舍去其余成分,目的是使系統降維而不丟失重要數據,這種方法廣泛應用于圖像識別技術中。
首先,將MEMS系統陀螺的原始數據減去它們的平均值,目的是消除數據因為單位不同而造成的影響,從而得到一組均值為0的數據。
式中,mn是各陀螺的輸出值。
然后,通過式(3)計算新得到數據的方差陣:

將得到的方差陣進行奇異值分解,按照特征值的大小進行排列,舍去小的特征值。根據保留的特征值和相應的特征向量,就得到了系統特性:

式中,Λ是舍去影響較小的特征值后保留下來的特征值,從大到小排列,W是相應的特征向量。最后,通過T檢驗、Q檢驗來檢測系統故障,但是會混淆噪聲和系統的運動。
2 改進的PCA算法
改進的PCA算法是將PCA算法和Potter算法[9]結合起來,首先通過Potter算法將陀螺的輸出映射到等價空間中,然后通過PCA算法進行訓練,訓練過程要保證系統沒有故障發生,從而得到系統的特性,此時的特性是系統映射到等價空間中之后的特性,它只是噪聲的函數,然后將特征向量陣乘以等價向量,得到新的輸出如式(6)所示。

式中,WT是PCA得到的特征向量陣,p是Potter算法得到的等價向量。從表達式可以看出,輸出y只是故障和噪聲的函數,從而消除了系統角運動的影響,同時也可以看出,陀螺噪聲會造成故障檢測的困難。
3 MEMS冗余慣組小幅值故障檢測的PCA算法設計和優化
五冗余慣組圓錐結構的可靠性是三軸結構的2.3倍,由于其特殊的結構和高可靠性,得到了廣泛應用,所以本文研究對象主要針對五冗余慣組圓錐結構[10?12],其結構如圖 1所示。冗余慣組的結構矩陣為:

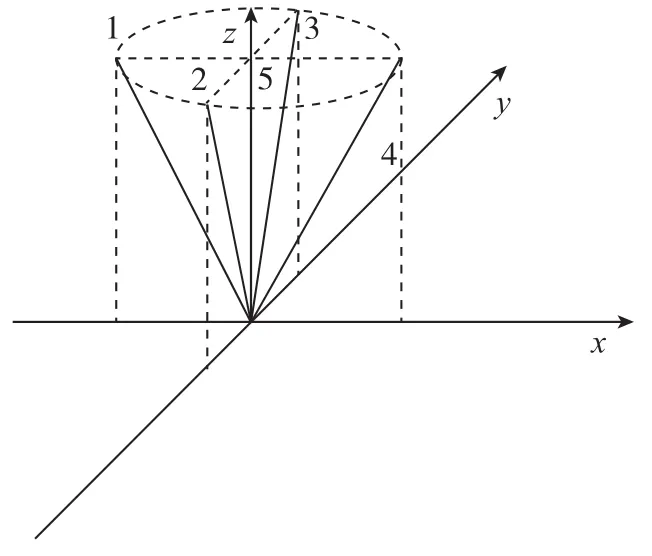
圖1 五陀螺冗余慣組結構Fig.1 Structure of five gyro redundant group
冗余慣組的量測值為m=Hx+ε+f。其中,m為5個陀螺輸出信息,H為量測矩陣,ε為量測噪聲,f為故障向量。
建立等價向量p=Vm。其中,
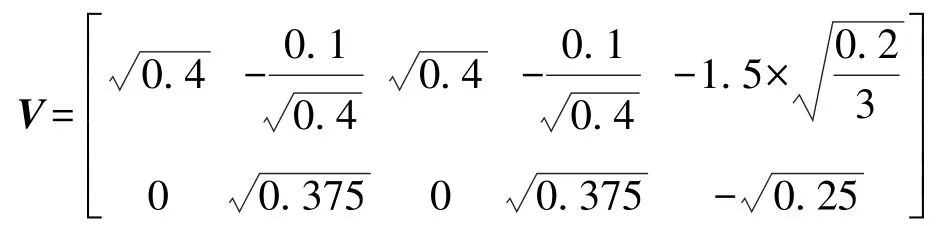
就得到p為2×1的矩陣。它的模值表示有沒有故障發生,可以設置一個門限,當模值超過門限時則認為有故障發生,再檢測哪個傳感器故障。V陣的列向量在等價空間中指示著5個陀螺的方向,通過觀察等價向量在等價空間中的分布就可以檢驗出是哪個陀螺故障。其中,各個陀螺在等價空間中的方向如圖2所示。

圖2 冗余慣組在等價空間中的分布Fig.2 Distribution of redundant groups in the equivalent space
P陣在沒有故障時只是噪聲的函數,為零均值的Gauss白噪聲;而當冗余慣組故障時,P不再是零均值的Gauss白噪聲,因此根據P陣的性質可以進行故障檢測。假設5個陀螺的隨機噪聲方差為,并且是相互獨立的白噪聲,則P陣的方差為2×4矩陣,如式(7)所示。
根據統計檢測原理,構造假設檢驗函數進行檢測,如式(8)、式(9)所示。總結各種故障檢測函數如下。
傳統的PCA算法故障檢測采用Q、T檢驗方法進行檢驗,改進的PCA檢驗函數如式(6)所示。本文的檢驗函數為:

結果表明,當階躍故障幅值達到陀螺噪聲方差10倍左右時,本文方法及時準確地檢測出了故障,在去噪能力上優于以往的PCA算法。
4 系統算例仿真
仿真采用五冗余圓錐陀螺結構,仿真時間為330s。系統在 210s~270s時以 6(°)/s的角速度轉動,冗余慣組采用MEMS陀螺慣組,陀螺噪聲方差為0.03(°)/s(注:不論陀螺噪聲方差為多少,只要階躍故障幅值達到此數值的10倍左右就會對故障檢測造成影響),假設250s~260s時發生故障,輸出信號疊加0.3(°)/s的階躍故障,陀螺輸出如圖3所示。
圖3的結果表明,階躍故障幅值很小,系統在210s~270s時有角運動發生。1號陀螺在250s~260s時發生故障,輸出疊加0.3(°)/s的階躍故障(如圖3畫圈部分所示),所以故障檢測函數應當檢測出1號陀螺在250s~260s時發生故障。
4種故障檢測函數如圖4所示。
圖4(a)的結果表明,傳統的PCA算法的檢測函數在系統存在角運動和故障的時候都超過了門限,所以難以區分系統角運動和故障。圖4(b)的結果表明,改進的PCA算法雖然消除了角運動對PCA算法的影響,但是故障檢測函數會被陀螺噪聲淹沒。由于陀螺噪聲的影響,會造成故障檢測的困難,而本文方法的輸出降低了噪聲的影響,在沒有故障發生時只有少數時刻會超過門限值,可以采用表決法去除這些點的影響;而當故障發生時,故障檢測函數的輸出便超過門限。相比以往的PCA算法,本文方法表現出了更好的去噪能力和檢測靈敏度。
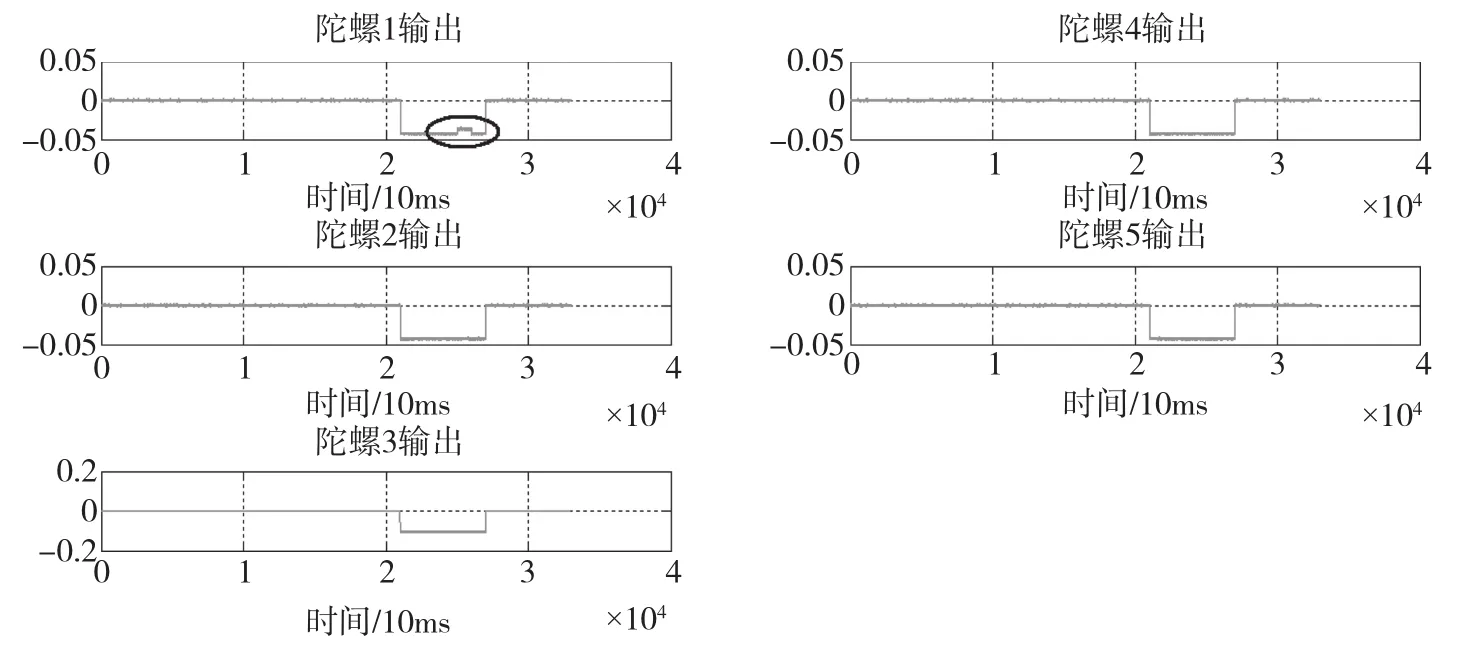
圖3 MEMS陀螺系統有故障時陀螺輸出Fig.3 Gyro output when MEMS gyroscope system is faulty

圖4 MEMS陀螺系統有故障時傳統PCA算法、改進的PCA算法、DFD1、DFD2的故障檢測函數輸出Fig.4 Traditional PCA algorithm,the improved PCA algorithm,DFD1,DFD2 fault detection function output when the MEMS gyroscope system is failure
5 結論
在各種高可靠性的系統中,冗余慣組的應用越來越廣,冗余系統可靠地工作對陀螺故障檢測提出了更高的要求。當組成冗余慣組的陀螺是MEMS陀螺且階躍故障幅值小到陀螺噪聲方差的10倍左右時,陀螺噪聲會對故障檢測造成困難,若不及時檢測出來,會對后續導航帶來誤差。傳統的PCA算法難以區分系統故障和角運動;而改進的PCA算法結合了Potter算法和傳統的PCA算法,將陀螺原始數據映射到等價空間中之后再進行PCA檢測,消除了傳統PCA算法難以區分角運動和系統故障的影響,但是陀螺噪聲會造成故障檢測的困難;假設檢驗考慮了陀螺噪聲的影響,但是陀螺輸出的原始數據不能滿足假設檢驗的條件,而映射到等價空間之后滿足假設檢驗的條件。因此,本文提出了改進的PCA算法和假設檢驗相結合的方法,考慮了陀螺噪聲的影響,既具有Potter算法和改進的PCA算法的優點,又表現出了更好的去噪能力,這對于提高整個慣導系統的穩定性具有重要的意義。
[1]楊為民.可靠性·維修性·保障性總論[M].北京:國防工業出版社,1995.YANG Wei?min.Reliability maintainability supportability subjects[M].Beijing:National Defense Industry Press,1995.
[2]王珍熙.捷聯式慣性導航系統慣性元件的設置與可靠性[J].中國慣性技術學報,1996,4(1):63?67.WANG Zhen?xi.On the disposition of the inertial units and the reliability of the strapdown inertial navigation system[J].Journal of Chinese Inertial Technology,1996,4(1):63?67.
[3]王社偉,張洪鉞.冗余配置捷聯慣性導航系統可靠性分析[J].航天控制,1999(3):71?77.WANG She?wei,ZHANG Hong?yue.Reliability analysis for a redundant strapdown inertial navigation system[J].Aero?space Control,1999(3):71?77.
[4]錢華明.冗余技術在慣性組合導航系統中的應用研究[J].中國慣性技術學報,1999,7(1):11?14.QIAN Hua?ming.Study on usage of redundancy technique in inertial integrated navigation system[J].Journal of Chi?nese Inertial Technology,1999,7(1):11?14.
[5]劉旭東,何傳五,李東.捷聯式慣性部件冗余設計[J].中國慣性技術學報,1995,3(4):44?49.LIU Xu?dong,HE Chuan?wu,LI Dong.Redundant design of strapdown inertial units[J].Journal of Chinese Inertial Technology,1995,3(4):44?49.
[6]Lee W H,Park C G.A fault detection method of redundant IMU using modified principal component analysis[J].Interna?tional Journal of Aeronautical&Space Sciences,2012,13(3):398?404.
[7]胡健,周百令,馬云峰,等.MIMU信號去噪方法的對比研究[J].中國慣性技術學報,2006,14(5):17?20.HU Jian,ZHOU Bai?ling,MA Yun?feng,et al.Contrast study on de?noising method for MIMU's output signals[J].Journal of Chinese Inertial Technology,2006,14(5):17?20.
[8]Waegli A,Guerrier S,Skaloud J.Redundant MEMS?IMU integrated with GPS for performance assessment in sports[C].Position,Location and Navigation Symposium,2008 IEEE/ION,2008:1260?1268.
[9]Potter J E,Suman M C.Thresholdless redundancy man?agement with arrays of skewed instruments[J].Integrity in Electronic Flight Control Systems,1977,15(1):15?25.
[10]李雪蓮,孫堯,莫宏偉,等.一種基于MIMU的九陀螺冗余配置[J].哈爾濱工業大學學報,2009,41(5):90?94.LI Xue?lian,SUN Yao,MO Hong?wei,et al.Redundancy configuration of 9?gyro based on MIMU[J].Journal of Harbin Institute of Technology,2009,41(5):90?94.
[11]Daly K C,Gai E,Harrison J V.Generalized likelihood test for FDI in redundant sensor configurations[J].Journal of Guidance Control& Dynamics,1979,2(1):9?17.
[12]潘鴻飛,袁立群,任尚云.捷聯慣導陀螺儀冗余配置研究[J].飛航導彈,2003(2):52?56.PAN Hong?fei,YUAN Li?qun,REN Shang?yun.Research on redundant configuration of strapdown inertial navigation gyroscope[J].Aerodynamic Missile Journal,2003(2):52?56.
MEMS Redundant Inertial Measurement Unit Small Value of the Fault Detection of PCA Algorithm Design and Optimization
HAN Qiang,LI Bao?guo,CHEN Ke?chuan
(Beijing University of Aeronautics and Astronautics,Beijing 100191)
U666.1
A
1674?5558(2017)02?01304
10.3969/j.issn.1674?5558.2017.05.008
2016?08?11
韓強,男,碩士,光學工程專業,研究方向為慣性導航。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
汽車維修與保養(2019年7期)2020-01-06 03:30:42
家庭影院技術(2017年9期)2017-09-26 03:41:45
汽車維護與修理(2016年10期)2016-07-10 08:17:41
海峽科技與產業(2016年3期)2016-05-17 04:32:12