汽輪發電機組轉子瞬時轉速測量中徑向振動補償裝置設計
2017-09-18 02:38:36薛江濤彭輝
中國設備工程 2017年17期
薛江濤,彭輝
(江蘇方天電力技術有限公司,江蘇 南京 211102)
汽輪發電機組轉子瞬時轉速測量中徑向振動補償裝置設計
薛江濤,彭輝
(江蘇方天電力技術有限公司,江蘇 南京 211102)
汽輪發電機組是復雜的旋轉機械系統,軸系的瞬時轉速是反映其工作狀態的重要基礎參數。本文以轉速敏感模塊中最常用的測速齒輪-電渦流傳感器為例,建立傳感器輸出模型,研究了轉子徑向振動對傳感器輸出特性的影響,在此基礎上設計了補償裝置,并進行了實驗研究。通過對結果的時域及頻域分析表明,合成后的輸出信號中基本抑制了徑向振動對電渦流傳感器的輸出信號的影響。
旋轉機械;瞬時轉速;電渦流傳感器;徑向振動
汽輪發電機組是復雜的旋轉機械系統,其轉子的瞬時轉速中包含有反映轉子轉動狀態的綜合信息,經深入挖掘后可應用于軸系扭轉振動特性分析、轉動慣量現場識別、調節系統動態特性分析等方面。其測量方法是相關研究的重點。
瞬時轉速測量系統主要包括轉速敏感模塊、數據采集及調理模塊、轉速提取算法模塊,其中轉速敏感模塊輸出的信號是整個系統的分析基礎。在工作中,轉子系統除了高速旋轉外,還存在有徑向振動,會直接影響轉速敏感元件的輸出乃至后期轉速提取算法的結果。
本文以轉速敏感模塊中最常用的齒輪-電渦流傳感器為例,建立了輸出模型,分析了徑向振動的影響,并以此為基礎設計了徑向振動補償裝置并進行了實驗研究。
1 轉速敏感模塊的輸出模型
1.1 電渦流傳感器理想輸出模型
目前,軸系瞬時轉速主要采用非接觸電量測量方法,即利用固定安裝的光電、電渦流等傳感器,將軸上的齒輪、反光帶等產生的位移、光等信號轉化為電信號,經采集處理后采用一定的算法提取其中的轉速信息。最常用轉速敏感元件為固定安裝的電渦流傳感器與對應的在轉子上同軸安裝的測速齒輪。
電渦流傳感器頭部裝有感應線圈,通入高頻電流后,產生的高頻電磁場在附近的被測金屬物體表面產生電渦流,其次生電磁場與線圈中原生電磁場相互疊加,改變了線圈的阻抗。該阻抗是線圈與被測金屬物體表面之間垂直距離的單值函數,整理后即可得到與垂直距離h之間成正比的輸出電壓ue,如式1所示。

其中s為傳感器的靈敏度,單位為V/mm。傳感器頭部在被測物體表面垂直投影面積為傳感器的敏感區域。
在齒輪-電渦流傳感器系統中,傳感器敏感區域內通常為齒-槽相間的臺階結構,輸出信號中包含了高低部分的綜合影響。
在實際測量中,首先要通過調整傳感器與被測物體之間的初始間隙來設置傳感器的初始輸出電壓。在齒輪-電渦流系統中,一般以齒頂作為調節初始間隙的基準,設間隙gx0,輸出電壓絕對值為u0,與最大輸出電壓絕對值的差值為uh,則齒輪旋轉引起的輸出電壓ug可表示為。

其中m為齒輪齒數,fr、fg分別為軸的旋轉頻率及齒輪通過ECT的頻率,根據齒輪的幾何結構特點,fg=mfr。由于齒輪的幾何特點,在傳感器敏感區域內測量表面為臺階狀,uh對應的距離he一般小于實際齒高ht。
電渦流傳感器的輸出可看作是齒頂與ECT的初始間隙形成的靜態信號u0與齒輪旋轉形成的動態信號的合成。
1.2 考慮徑向振動后的電渦流傳感器輸出模型
轉子的徑向振動包含有多種頻率成分,并且可沿互為垂直的兩個方向進行分解。具體到齒輪-電渦流傳感器系統,可選擇沿著或垂直于電渦流傳感器軸向方向,分別稱平行分量及垂直分量。
由于一般情況下轉子徑向振動以基頻(轉子旋轉頻率)分量為主,因此本文主要以基頻分量為例分析對轉速測量的影響。相應的運動方程為:


其中又以平行分量影響最大,設在零相位位置時,轉子向左處于最大位移,對應產生的動態電壓為:

考慮到齒輪的位置,則電渦流的總輸出為:
可見,平行分量造成的動態電壓直接疊加在齒輪的輸出信號上。因此在t時刻,ECT的輸出電壓為:

為反映平行分量與齒輪信號幅值的大小對比及對電渦傳感器輸出信號的影響,定義輸出電壓比:

由于徑向振動水平方向的影響,徑向振動信號與齒輪脈沖信號相互疊加。齒輪脈沖的信號的“包絡”為振動信號。這樣的信號經后期調理電路后得出的信號間隔不均并會還出現“丟齒”現象,造成轉速提取誤差增大。
2 徑向振動補償裝置的設計
根據轉子運動特點,轉子的徑向振動在直線方向上具有“互補”性,即在同一時刻下,如轉子向某方向運動位移達到最大,則在該方向上對稱180°方向上則為最小。因此,考慮到轉子運動的互補性,補償徑向振動干擾可采用兩個傳感器以180°對稱安裝測量齒輪盤的瞬時轉速,如圖1所示。
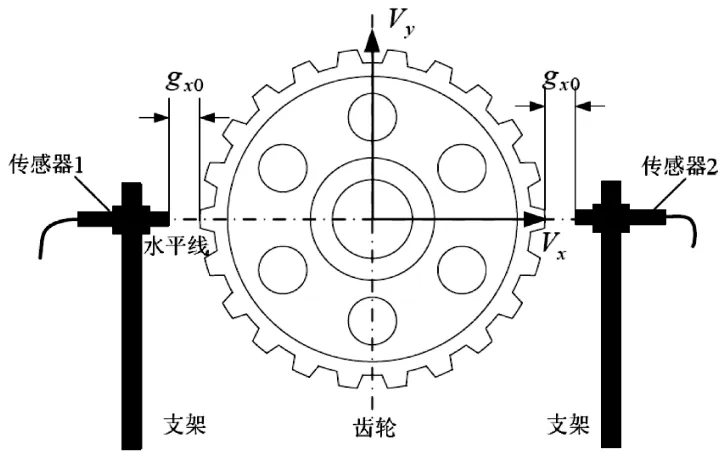
圖1 對稱安裝渦流傳感器
當傳感器以180°對稱安裝后,對于平行分量,根據傳感器的特性,在同一時刻,位移值增量是大小相等,方向相反的,設傳感器1的輸出增量為正,則兩傳感器的輸出為:

對輸出取平均可得

可見,合成信號中消除了徑向振動平行分量的影響,保留了瞬時轉速的有效成分。
累加電路原理如圖2所示。

圖2 累加電路示意圖
圖中的U1、U2即為兩個輸入端,“+”、“-”代表分別輸入信號的信號端和地線端,兩個電阻R1、R2的阻值相等,則電路的輸出端信號為:

實現了兩輸入端的累加平均。
根據上述原理,在某型轉子試驗臺進行試驗研究。
兩個成對安裝的電渦流傳感器輸出各自的原始波形與合成信號時域圖對比。當前轉速為600r/min,齒輪齒數為60齒。
將兩路傳感器的信號累加后,在合成信號中基本消除了徑向振動的影響,合成信號的主要成分為齒輪產生的脈沖頻率。
3 結語
本文建立了齒輪-電渦流傳感器的輸出模型,分析了轉子徑向振動對傳感器輸出信號的影響,在此基礎上設計了徑向振動補償裝置并進行了實驗研究,結果表明在時域及頻域內,合成信號中基本消除了徑向振動的影響,效果較為顯著。
[1]葉榮學,于立華,李貞淑等.汽輪機飛升轉速的予測[J].東北電力學院學報,1994,14(4):73-77.
[2]孫海軍.600MW超臨界機組測功法甩負荷試驗分析[J].汽輪機技術,2007, 49(5): 368-370.
[3]李海濤,宋百玲,孫軍超.臨界/超超臨界汽輪發電機組甩負荷仿真分析[J].汽輪機技術,2007,49(6):447-449.
TM311
A
1671-0711(2017)09(上)-0105-02
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
艦船科學技術(2022年8期)2022-06-05 07:36:28
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
中國生殖健康(2019年3期)2019-02-01 06:12:26
中國公路(2017年18期)2018-01-23 03:00:38
數學物理學報(2017年6期)2018-01-22 02:26:40
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
