機車實時速度估計的研究現(xiàn)狀與技術(shù)展望
2017-09-03 10:57:36湖南工業(yè)大學劉林凡
電子世界 2017年16期
湖南工業(yè)大學 劉林凡
機車實時速度估計的研究現(xiàn)狀與技術(shù)展望
湖南工業(yè)大學 劉林凡
重載機車是大宗貨物中長距離運輸?shù)淖罴淹緩健V剌d機車實時速度是粘著控制方法的重要參數(shù)。本文從添加裝置測量和利用已有的傳感器估計兩個方面,綜述了近年來重載機車實時速度估計的研究現(xiàn)狀。并討論了重載機車實時速度估計所面臨的難點,主要在于噪音的處理和傳感器故障兩個方面。最后展望了機車實時速度估計的研究方向。
傳感器;重載機車;實時速度;噪音
0 引言
近年來我國鐵路快速發(fā)展,鐵路網(wǎng)縱橫交錯,重載機車運量大、速度快、成本低,給貨物運輸帶來了極大便利[1]。隨著國家經(jīng)濟建設和一帶一路戰(zhàn)略的發(fā)展需求,貨運重載將成為客運高速之后中國鐵路建設的新重點。隨著鐵路機車的運輸能力不斷釋放,保障重載機車安全運行顯得尤為重要[2]。當輪對的牽引力大于最大黏著力時,輪對就會產(chǎn)生空轉(zhuǎn)。空轉(zhuǎn)時輪對的轉(zhuǎn)速迅速上升,如果任其發(fā)展往往可能在數(shù)秒或略長時間內(nèi)超過構(gòu)造速度,這樣不僅使牽引力下降,而且由于高速空轉(zhuǎn)使輪對的踏面嚴重擦傷,若是帶有輪箍結(jié)構(gòu)形式的輪對,還會導致輪箍因過熱而松動脫落,同時牽引電機轉(zhuǎn)子繞組也可能因離心力過大而飛散“掃膛”,可能會引起重大安全事故[3]。重載機車安全運行受到了廣發(fā)關(guān)注,是國內(nèi)外學者和科研單位研究的重點。
牽引控制是保障機車安全運行的關(guān)鍵環(huán)節(jié),然而,一切先進的控制方法都是建立在實時了解軌道車輛實時速度的信息的基礎上的。當前我國機車大部分采用光電式測速傳感器進行機車實時速度的測量[4],電式測速傳感器的本質(zhì)是測量機車各個輪對的線性速度。在沒有發(fā)生的車輪空轉(zhuǎn)或滑行現(xiàn)象的情況下,這種方法能夠提供可靠的精度。當車輪發(fā)生空轉(zhuǎn)或滑行時,車輪旋轉(zhuǎn)速度便不能準確表示軌道車輛在線實時速度,通常的解決方法是平均所有已知的車輪速度。
1 機車速度相關(guān)的概念介紹
重載機車是指牽引重量達到或超過8000噸、車輛軸重超過27噸的貨物列車。隨著重載貨運量增加,重載機車的牽引功率越來越高。例如,在《中國制造2025》中,提出研發(fā)具有自主知識產(chǎn)權(quán)的30噸軸重機車,牽引功率要達到9600kw。車輪蠕滑及牽引力產(chǎn)生示意圖如圖1所示。
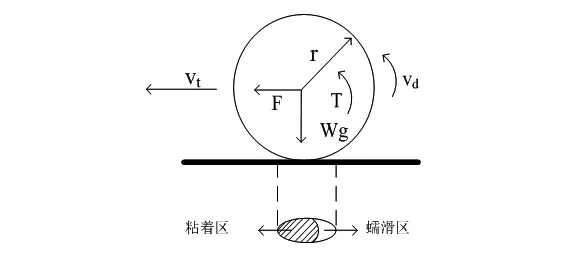
圖1 車輪蠕滑及牽引力產(chǎn)生示意圖
在機車載荷Wg的作用下,輪軌間的粘著作用可以提供輪周最大切向牽引力F。在機車運行中,輪對受驅(qū)動力矩T的作用以輪對速度vd前行,輪對速度vd總是高于機車實時運行速度vt,這種速度差稱為蠕滑速度為vs5]:

式中:r為車輪半徑;ωd為輪對角速度。
2 國內(nèi)外研究現(xiàn)狀
近年來,對估計重載機車實時速度的方法分為添加裝置測量和利用已有的傳感器估計兩個方面。
在利用添加裝置測量機車實時速度的方法中,鄭平[6]研制了基于單片機的機車速度信號模擬與測量裝置。該裝置能準確地測量機車運行狀態(tài)下光電轉(zhuǎn)速傳感器輸出的速度信號。文獻[7]成功將激光技術(shù)運用在機車實時速度測量上。文獻[8]提出將兩個慣性傳感器安裝在機車轉(zhuǎn)向架上,通過慣性傳感器的動態(tài)響應估測機車的實時車速。其他基于的時間延遲檢測類似的方法也被提出,只是采用不同的傳感器,例如,光學傳感器[9]或攝像機[10]。由于可靠性、成本等方面的問題,這些系統(tǒng)都沒有被廣泛應用于鐵路車輛。最近,全球定位系統(tǒng)已經(jīng)逐步應用于軌道車輛的實時速度測量。姬冰冰[11]提出了基于自適應卡爾曼濾波的方法來提高雷達的測速精度,并成功運用在機車上。通過GPS或安裝雷達,能夠獲得機車速度,但是這些方法不僅成本昂貴,而且在惡劣天氣狀況和經(jīng)過隧道時測速精度差。
在利用已有的傳感器估計實時車速的方法中,任強[12]提出利用機車6個軸的速度和6個軸的加速度估計出重載機車的實時速度。趙寅[13]采用速度傳感器和加速度傳感器獲取的車身加速度和車輪速度信息,文獻[14]提出卡爾曼濾波算法的速度估算方法。利用機車已有的傳感器獲取相關(guān)信息,再通過處理獲取機車的實時速度是目前研究的難點。
3 存在問題及技術(shù)展望
3.1 存在的問題
從上述研究現(xiàn)狀可看出,對軌道車輛實時速度估計的研究成果主要集中在添加裝置測量的基礎上,對本項目的研究具有重要的指導意義。但在采用已有的傳感器估機車實時車速方面的研究成果,尚不豐富,還需針對下述問題開展進一步研究:
(1)利用軌道車輛自有傳感器測量車速可以反應車輛的實時速度狀態(tài),這種方法實用性和實時性好,但測量的效果受到數(shù)據(jù)處理能力的制約。由于噪聲干擾,速度傳感器輸出的原始速度信號中夾雜著噪聲分量。如果對速度信號不作處理就直接用于車輛實時速度測量,必然會影響粘著特性的辨識精度的可靠性,情況惡劣時甚至會導致控制系統(tǒng)做出錯誤的判斷和決策,嚴重損害粘著利用性能。
(2)重載機車工作環(huán)境復雜、惡劣,在機車控制系統(tǒng)中,傳感器是機車中容易損壞的車載設備。目前,人工檢測和定期維修校準是診斷測速傳感器故障的最基本的方法,但其工作效率低、工作強度大、實時性差,不能滿足重載機車當前的需求。
3.2 技術(shù)展望
針對車輛運行環(huán)境復雜及軌道路面特殊而存在噪音問題,探索卡爾曼濾波器和模糊控制相融合的測速方法。為了模擬重載機車的真實運行情況。通過合理選擇車輛測速動態(tài)方程系數(shù),用卡爾曼濾波器處理軌道車輛運行中產(chǎn)生的噪聲。通過模糊控制調(diào)整系數(shù)以處理軌道車輛的空轉(zhuǎn)和打滑突發(fā)情況,對機車的實時速度進行估計。
針對傳感器容易損壞的問題,研究基于神經(jīng)網(wǎng)絡算法的傳感器故障診斷方法。近年來,BP算法,支持向量機和極限學習機等逐漸被應用在傳感器故障診斷方面。在分析重載機車常見故障模式及故障特征的基礎上,采用深度學習的預測方法,建立重載機車傳感器的故障診斷模型,實現(xiàn)對傳感器系統(tǒng)的故障診斷和數(shù)據(jù)重構(gòu),將會是研究的熱點。
4 總結(jié)
重載機車的實時車速測量是粘著控制方法研究中的難點,本文綜述了近年來國內(nèi)外重載機車實時車速測量方法和優(yōu)點和缺點,并分析了利用重載機車自身速度傳感器測量實時車速方法中的難點。最后針對存在的難點問題,提出了進一步研究的方向。
綜合國內(nèi)外研究現(xiàn)狀,以機車已經(jīng)安裝的傳感器為基礎,研究多種傳感器融合的機車實時速度測量,將是未來研究的熱點,研究多種傳感器融合的優(yōu)化算法,該算法的精度要優(yōu)于機車速度傳感器的測速的算法,這將是以后研究的重點。
[1]陳慧楠.基于輸入約束在線辨識的高速列車主動粘著防滑牽引控制[D].北京交通大學,2015.
[2]方翁武.25t/30t軸重的重載機車動力學性能對比研究[D].西南交通大學,2014.
[3]計永海.東風4型機車加裝空轉(zhuǎn)保護電路[J].鐵道機車與動車,1990(5):51-52.
[4]馮雪強.非接觸式機車光電速度傳感器故障分析與對策[J].機車車輛工藝,2013(1):47-48.
[5]黃景春,唐守乾,林鵬峰,等.基于軌面辨識的電力機車粘著控制仿真研究[J].計算機仿真,2015,32(1):206-210.
[6]鄭平.基于單片機的機車速度信號模擬與測量裝置[J].鐵道機車車輛,2012,32(6):79-81.
[7]Mu.oz J,Craft M,Ahmadian M,et al.Multifunction LIDAR Sensors for Non-Contact Speed Measurement in Rail Vehicles:Part I-System Installation and Implementation[C]//2013 Joint Rail Conference.American Society of Mechanical Engineers,2013:V001T02A009-V001T02A009.
[8]Mei T X,Li H.Measurement of vehicle ground speed using bogiebased inertial sensors[J].Proceedings of the Institution of Mechanical Engineers Part F Journal of Rail & Rapid Transit,2008,222(2):107-116.
[9]Bohmann J,Meyr H,Spies G.A digital signal processor for high precision non-contact speed measurement of rail-guided vehicles[C]// Vehicular Technology Conference.IEEE,2006:454-462.
[10]Harvey A L,Cohen H A.Vehicle speed measurement using an imaging method[C]//International Conference on Industrial Electronics,Control and Instrumentation,1991.Proceedings.IECON. IEEE,1991:1730-1733 vol.3.
[11]姬冰冰,買培培,蘇濤.一種基于卡爾曼濾波的機車測速雷達算法[J].火控雷達技術(shù),2009,38(1):43-47.
[12]任強,黃景春.重載機車粘著控制方法的研究與設計[M].成都:西南交通大學,2014.
[13]趙寅,徐國華,楊超,等.基于模糊卡爾曼濾波算法的速度估算方法[J].儀表技術(shù)與傳感器,2012(12):80-83.
[14]Pichlík P,Zděnek J.Train velocity estimation by extended Kalman filter[C]//Electronics,Computers and Artificial Intelligence (ECAI),2016 8th International Conference on.IEEE,2016:1-4.
劉林凡(1989—),男,碩士研究生,研究方向為電力傳動技術(shù)及其故障診斷。
猜你喜歡
中學生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
Coco薇(2016年2期)2016-03-22 02:42:52
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
電源技術(shù)(2016年9期)2016-02-27 09:05:39
電源技術(shù)(2015年1期)2015-08-22 11:16:28
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56