機器人探測氣體泄漏源定位研究
2017-07-26 01:28:46李素霞
實驗技術與管理 2017年7期
李素霞
(濰坊科技學院經 濟管理學院,山東 壽光 262700)
機器人探測氣體泄漏源定位研究
李素霞
(濰坊科技學院經 濟管理學院,山東 壽光 262700)
采用攝像機小孔成像模型以及氣味主動嗅覺的組分方程模型,建立了機器人檢測氣味泄漏源的控制模型,給出了氣味源探測的算法。通過模擬天然氣泄漏的過程表明,采用的模型能夠較好實現氣體濃度變化檢測。軟件仿真結果表明機器人擁有了環境運動的能力;實際環境的應用結果表明系統可以將團狀的氣體分子在空氣中運動感知和發現,設計的控制機器人氣味追蹤算法具有實際應用可行性。研究成果對于我國機器嗅覺和氣體定位的發展有一定的理論和實際意義。
機器人; 主動嗅覺; 組分方程
智能視頻監控系統中,運動目標的追蹤與檢測一直都是其研究難點和關鍵,這也是包括自動控制、機器視覺等學科的研究熱點方向[1-3]。其中機器嗅覺定位于控制更為重要的關鍵技術,日本的團隊在上世紀90年代就開始了機器嗅覺問題的探究,當時最早出現的成果是從飛蛾行為的模型中建立,通過多個氣體、風速傳感器實現氣味的方向性檢查,結合風向和氣味信息共同實現氣味檢測,以上研究已經在消防領域有了廣泛性的應用[4-7];澳大利亞Russel課題組,采用的是基于渦蟲趨化性運動模型設計的地下味源定位系統,提出了渦蟲跟蹤算法較好的實現了酒精源定位[8-9];瑞士的Pyk課題組則是考慮了雌蛾基于信息素實現雄蛾跟蹤模型,實現了機器人探測化學源的應用,之后該團隊更是結合人工蛾模型設計了能夠躲避搜索路徑障礙物的氣味嗅覺機器人[10-13];國內關于機器人嗅覺以哈工大、中科院遙感所為代表,已經實現了移動機器人仿生運動控制研究,能夠較好實現火災煙霧的定位[14-16]。
近年來隨著國內霧霾現象的日益惡化,各類關于氣味的研究又成為了各領域的研究熱點[17-18]。氣味或者氣體分子分布比較容易受到湍流的擾亂,會出現隨機彎曲的現象,導致結構的不定性[19-21]。上述問題必然導致傳感器檢測氣體濃度容易被擾動。基于以上問題和背景,本團隊提出了仿生學的主動嗅覺定位,建立了實現機器人檢測氣味泄漏源的模型,較好地完成了氣體泄漏源定位。研究成果對于我國機器嗅覺和氣體定位的發展有一定的理論和實際意義。
1 氣體泄漏源定位模型
1.1 運動目標的移動機器人控制
首先分析移動機器人的控制模型。設移動機器人定位中心是(xo,yo),于是可以將目標的跟蹤定位分為以下2部分:計算機器人左右移動的距離ΔX,以及得到機器人計算前后移動的距離△Z。對于機器人左右移動的實際距離采用攝像機小孔成像的模型進行得出,于是存在如下關系:
(1)
上述方程中參數都是小孔成像模型參數,詳見文獻6和文獻14,其中的dx和dy表示攝像機成像像素的橫向長度和縱向長度。
對于機器人計算前后移動的距離ΔZ,則較為復雜。因為實際的定位過程需要確保定位目標的成像和圖像之間面積的比值不會發生變化,進而通過定位目標的成像和圖像之間面積的函數關系得到機器人運動的ΔZ。這里設定位目標的成像和圖像面積分別為k1和k2,設定位目標與機器人近似模型得到距離為mZ,于是依據運動模型可以得到以下函數關系:
(2)
上述方程中的YB(t)表述的是定位目標在圖像直角坐標系中的位置。式(1)和式(2)可以按Kalman濾波確定定位目標的位置,進而計算得到相應的距離。
1.2 主動嗅覺的控制過程
本文設計的氣味主動嗅覺的控制過程主要通過動量方程、組分方程的2類數學模型進行確定。
1.2.1 動量方程模型
氣體分子的擴散會滿足動量守恒,于是可以建立擴散過程中x、y、z方向上相應的動量方程。一般形式能夠表述為
(3)
式中,ρ為氣體分子密度,μt為t時間擴散系數,ui表示i分子的動量,gi表示i分子壓力。
在x方向上的方程滿足以下關系:
(4)
在y方向上的方程滿足以下關系:
(5)
在z方向上的方程滿足以下關系:
(6)
上述方程中參數u、v、w分別是x、y、z方向上擴散過程的速度,g是重力加速度,p是擴散開始的絕對壓力。
1.2.2 組分方程模型
氣體分子的擴散依然會滿足組分質量守恒,于是可以建立擴散過程中組分方程,也是本文采用的模型:
(7)
上述方程中參數ω為各組分的質量分數,Dt是流體擴散系數。
1.3 氣體定位算法
本文設計的氣味定位過程算法如下:首先確定氣體濃度閾值,氣體濃度比此閾值小時就認為氣體分子沒有形成煙羽。移動機器人檢測煙羽是依據風向傳感器的逆向移動,低于設計的閾值就確定會沒有煙羽;當高于閾值時,機器人就會采用擴展半徑進行探測選擇,直至找到氣味源。
算法重復定位語句描述如下:
While (1) {If (Concentration>Limit Val) Follow Wind; Else Search Plume}
2 氣體實驗
2.1 環境模型
通過軟件構建實驗環境模型,環境設置成如下形式:泄漏口的初始速度設置為5 m/s,甲烷的質量分數設置為 1;空氣入口的速度設置為0.5 m/s,出口壓力直徑設置為0.25 m。假設從泄漏口開始計算,迭代的時間步長設置為2.5 s,天然氣的初始濃度設置為0,泄漏的初始速度設置為5 m/s。
2.2 算法和嗅覺應用結果
圖1—3分別給出了系統模型算法應用52.5、105、157.5 s時室內甲烷的情況。從圖中分布情況可以得出,系統能夠較好地確定甲烷煙羽濃度變化情形,即采用的模型能夠較好實現氣體濃度變化檢測。
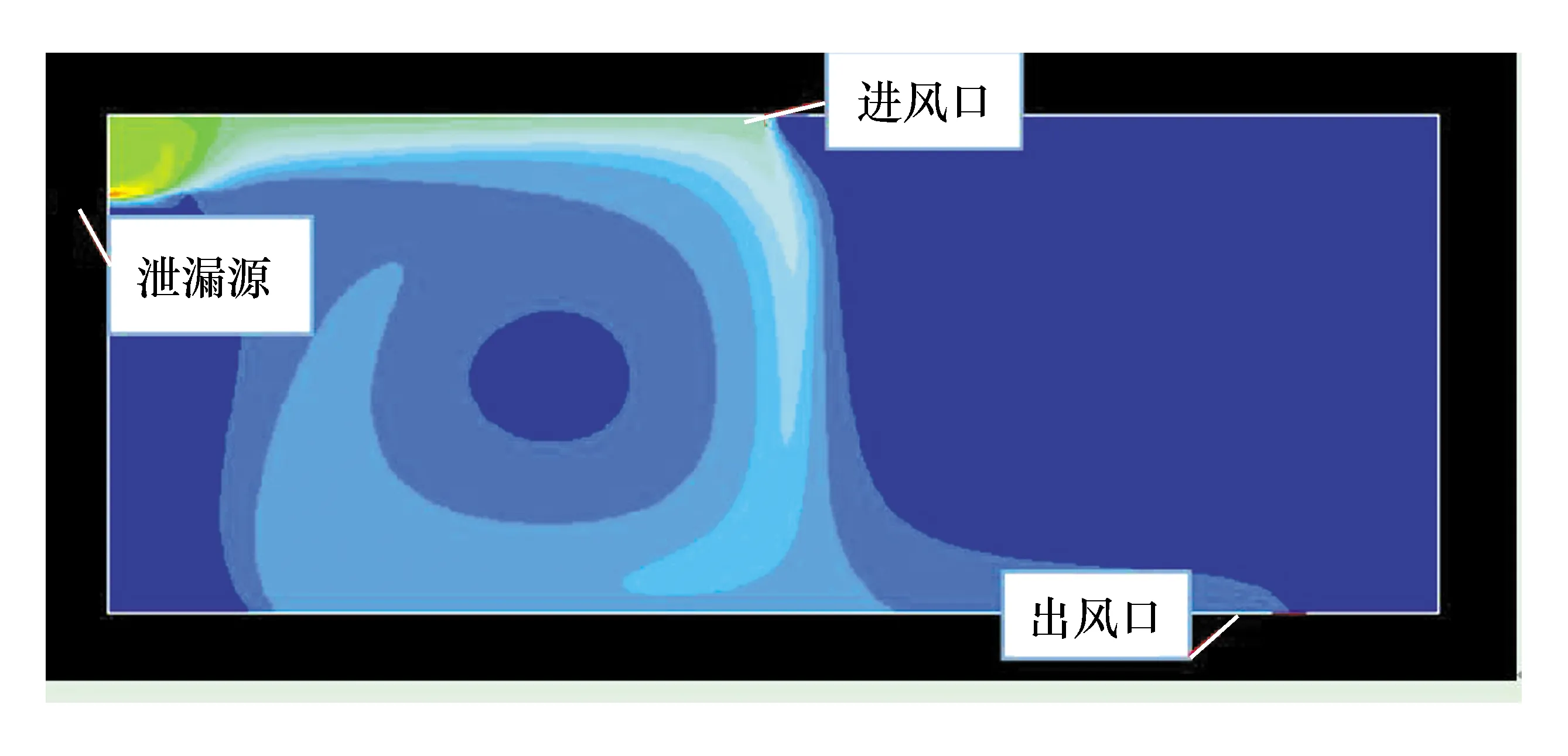
圖1 應用52.5 s時室內甲烷的情況
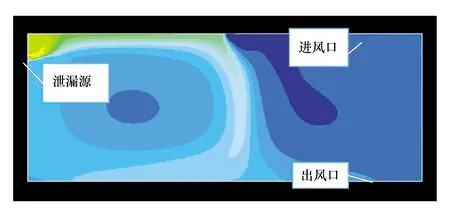
圖2 應用105 s時室內甲烷的情況
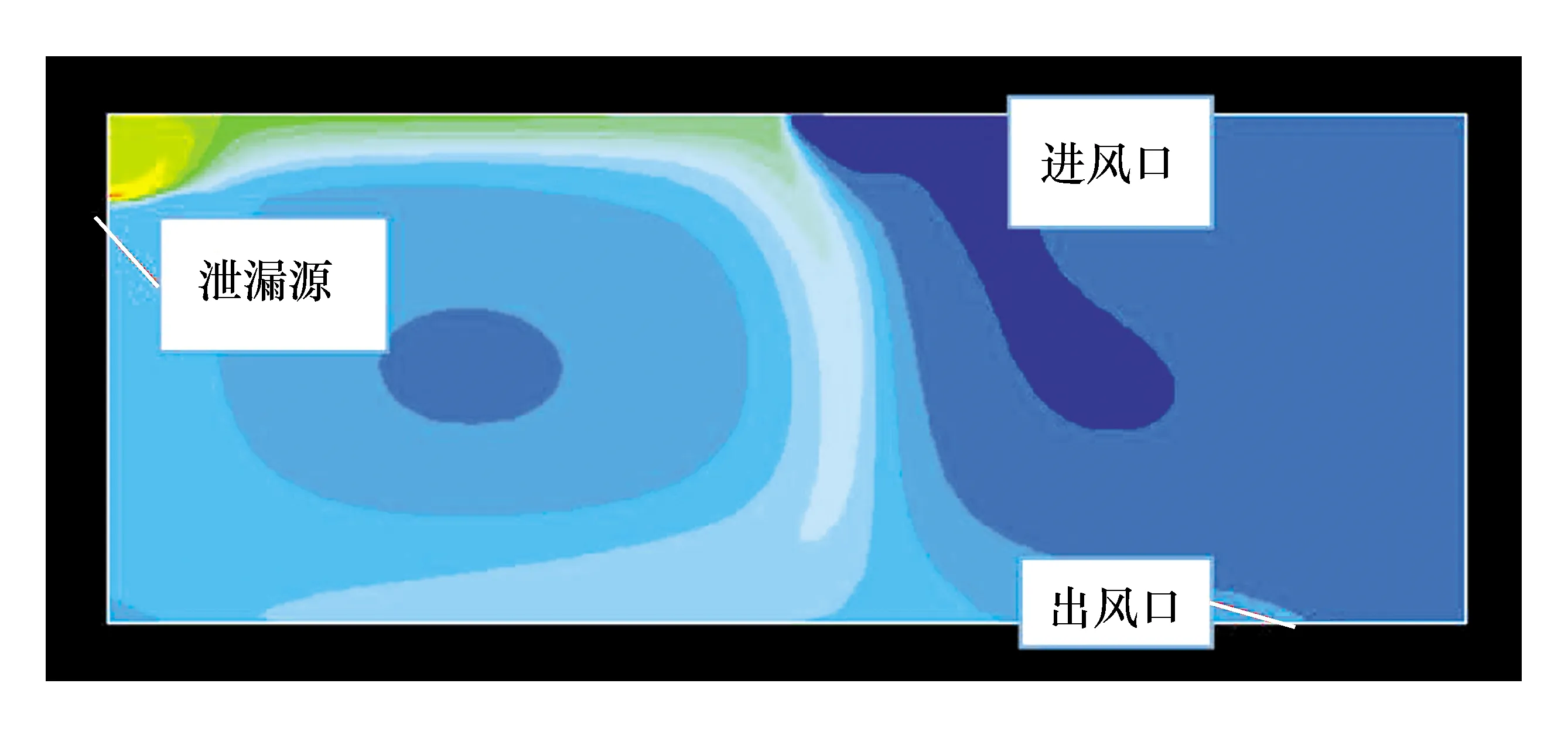
圖3 應用157.5 s時室內甲烷的情況
圖4給出了采用設計的機器人主動嗅覺氣味源定位算法的軟件仿真結果,模擬的實際環境尺寸與上述的模擬范圍保持一致。從圖4中的結果可以看出,機器人能夠在不同的位置通過訪問導入到源碼文件搜索相應位置的甲烷煙羽濃度值來感知局部甲烷煙羽濃度大小。通過使用這種方法,模擬機器人有能力感知到局部的煙羽濃度,這樣機器人便擁有了在模擬的環境中運動的能力。
2.3 實際應用分析
這里針對室內微風的環境進行實際應用,運用建立的動態呈湍流特性的模型,即在空間任一點的濃度和風速、風向是隨時間變化的。圖5為某實際環境的應用結果,由結果可知團狀的氣體分子在空氣中運動被感知和發現,這表明設計的控制機器人氣味追蹤算法具有可行性。

圖4 仿真結果(起點(5.1,0),起點濃度值C0=0.45)

圖5 實際應用情況
3 結語
主動嗅覺定位技術可以主動對目標化學物質感知并確定其位置,在環境監測、危險物品泄漏檢測、倉庫安保等方面具有重要的意義。目前,這項技術仍然處在探索階段,有著廣闊的科研空間。本文主要完成了在計算機模型下,將基于濃度梯度搜索算法的煙羽跟蹤策略進行了氣源定位,并完成仿真驗證和實際驗證,證明了設計的可行性。
References)
[1] 賀寧,楊建華,陳立偉,等.主動嗅覺輪式移動機器人的系統設計及定位方法研究[J].機械科學與技術,2013,32(2):285-288.
[2] 趙智琦,房建東.隧道內車輛運輸儲罐泄漏源機器人仿生感知算法研究[J].機床與液壓,2015,15(6):80-85.
[3] 陳一村,蔡浩,陳志龍,等.基于主動嗅覺的室內時變污染源定位方法[J].解放軍理工大學學報(自然科學版),2016,17(3):257-263.
[4] 張東,程磊,劉波,等.基于移動機器人的主動嗅覺技術研究[J].計算技術與自動化,2014,33(2):7-10.
[5] 任坤,劉鵬.基于神經網絡的移動機器人主動嗅覺定位研究[J].決策與信息(下旬刊),2015,20(8):247.
[6] 王陽,孟慶浩,李騰,等.室內通風環境下基于模擬退火算法的單機器人氣味源定位[J].機器人,2013,35(3):283-291.
[7] 程磊,張東,劉波,等.基于無線傳感器網絡的氣體泄漏源定位機器人設計[J].傳感器與微系統,2015,91(2):85-87.
[8] 趙雨辰.喚醒嗅覺:從宗教儀式中氣味的作用看藝術創作中嗅覺機制的運用[J].美與時代(上旬刊),2014,5(6):22-25.
[9] 陳一村,蔡浩,陳志龍,等.基于改進PSO算法的室內時變污染源定位方法[J].環境工程,2016,34(10):142-146,171.
[10] 崔日鮮,劉亞東,付金東,等.基于機器學習和可見光光譜的冬小麥葉片氮積累量估算[J].光譜學與光譜分析,2016,36(6):1837-1842.
[11] 程術希,孔汶汶,張初,等.高光譜與機器學習相結合的大白菜種子品種鑒別研究[J].光譜學與光譜分析,2014,21(9):2519-2522.
[12] 王肇國,易涵,張為華,等.基于機器學習特性的數據中心能耗優化方法[J].軟件學報,2014,15(7):1432-1447.
[13] 徐健鋒,湯濤,嚴軍峰,等.基于多機器學習競爭策略的短時交通流預測[J].交通運輸系統工程與信息,2016,16(4):185-190,198.
[14] 何清,李寧,羅文娟,等.大數據下的機器學習算法綜述[J].模式識別與人工智能,2014(4):327-336.
[15] 陸悠,李偉,羅軍舟,等.一種基于選擇性協同學習的網絡用戶異常行為檢測方法[J].計算機學報,2014,37(1):28-40.
[16] 武小紅,蔡培強,武斌,等.基于無監督可能模糊學習矢量量化的近紅外光譜生菜品種鑒別研究[J].光譜學與光譜分析,2016,36(3):711-715.
[17] 韓瑩,李姍姍,陳福明,等.基于機器學習的地震異常數據挖掘模型[J].計算機仿真,2014,31(11):319-322.
[18] 唐飛,王波,查曉明,等.基于雙階段并行隱馬爾科夫模型的電力系統暫態穩定評估[J].中國電機工程學報,2013,33(10):90-97.
[19] 徐健鋒,許園,許元辰,等.基于語義理解和機器學習的混合的中文文本情感分類算法框架[J].計算機科學,2015,42(6):61-66.
[20] 魯剛,余翔湛,張宏莉,等.基于集成聚類的流量分類架構[J].軟件學報,2016,27(11):2870-2883.
[21] 孫麗華,嚴軍峰,徐健鋒,等.基于多機器學習競爭策略的短時雷電預報[J].計算機應用,2016,36(9):2555-2559.
Research on locating gas leakage source by robot detection
Li Suxia
(School of Economics and Management,Weifang University of Science and Technology,Shouguang 262700,China)
By using the camera small hole imaging model and the component equation model of odor active olfaction,a control model of locating odor leakage by robot detection is established,and the algorithm of odor source detection is presented. By simulating the process of gas leakage,the model can be used to detect the concentration change of gas,and the simulation results by using solfware show that the robot has ability for the environmental movement. The application in the actual environment shows that the system can perceive and find the movement of the mass of gas molecules in the air,and the algorithm of the designed control robot for odor tracking has the feasibility of practical application. The research results have theoretical and practical significance for the development of machine olfaction and gas location in our country.
robot; active olfaction; component equation
10.16791/j.cnki.sjg.2017.07.013
2017-01-13
國家自然科學基金項目(51562017);山東省自然科學基金項目(81083);山東省高等學校科技發展計劃項目(J16LN51)
李素霞(1979—),女,山東壽光,碩士,講師,主要從事計算機領域研究.
E-mail:liuna1934252@163.com
TP242.6
A
1002-4956(2017)07-0046-03
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
北京航空航天大學學報(2022年6期)2022-07-02 01:59:12
四川輕化工大學學報(自然科學版)(2021年3期)2021-08-30 06:37:02
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
制造技術與機床(2017年3期)2017-06-23 08:11:21
光學精密工程(2016年6期)2016-11-07 09:07:19
智能系統學報(2015年4期)2015-12-27 09:38:35
核科學與工程(2015年4期)2015-09-26 11:59:03
中國海洋大學學報(自然科學版)(2014年8期)2014-02-28 12:21:31
