一種聚類優化的傳感器布置方法研究
2017-07-19 12:36:58李世其劉世平
振動與沖擊 2017年14期
張 恒, 李世其, 劉世平, 張 哲, 王 躍
(華中科技大學 機械科學與工程學院,武漢 430074)
一種聚類優化的傳感器布置方法研究
張 恒, 李世其, 劉世平, 張 哲, 王 躍
(華中科技大學 機械科學與工程學院,武漢 430074)
復雜結構試驗/理論振型的匹配是模態參數型修正過程的重要內容。以測量并獲取用于模態參數識別的最佳信息為目標,實現布置在結構上有限數量的傳感器能有效避免信息冗余,提出了一種聚類優化的傳感器布置方法。根據結構模態中各自由度振型的動力相似性,應用k-means聚類算法對自由度進行自動集結并分類。采用有效獨立法分別從各聚類自由度中搜索出模態分辨率最高的傳感器位置作為實際的測量位置。最后通過一個懸臂梁、一個懸臂薄板的數值分析和一個旋轉濾光輪組件的模態測試試驗對該優化布置方法進行驗證。分析結果表明,這種方法能有效選出獨立敏感性測點,并且具有較高的搜索效率。
傳感器布置;k-means聚類;有效獨立法;模態試驗;模型驗證
航天器結構模型試驗驗證是結構計算模型修正技術必須解決的關鍵性問題。其中,試驗模態參數的辨識精度很大程度上決定了模型修正技術的成敗和效率,而高質量的測試數據則是試驗模態參數辨識精度的保障[1]。隨著大型機械結構日益復雜,結構理論與試驗模型匹配的難度迅速加大。目前采用的對策是在模型試驗驗證過程中,利用結構的先驗理論模型進行測試傳感器的優化配置,選擇模態分辨率最高的傳感器位置作為實際的測量位置,使理論與實驗模型滿足高度的相關性,從而準確獲取試驗驗證模型[2]。傳統的傳感器優化配置方法是一種次優化方法。Kammer根據Fisher信息矩陣行列式最大化的思想提出了一種有效獨立法[3],通過迭代刪除獨立貢獻最小的自由度最終確定傳感器的數目,這種方法可擴展應用于三向加速度傳感器的布置過程[4]。能量法是根據結構自由度的模態動能或單元應變能選擇傳感器的位置[5]。Papadimitriou提出一種基于信息熵指標的傳感器優化方法,該方法是把模態參數估計的不確定性用信息熵指標來度量,通過度量值的最小原則選擇傳感器[6]。然而,這些傳感器優化布置方法對自由度數目的選取依賴試驗者的主觀經驗,當采用傳感器的數目大于感興趣的模態階數時,優化方法選擇的傳感器表現出明顯的聚類特性[7],并且過多的傳感器布置將不可避免引入冗余信息[8]。從工程應用方面考慮,單純采用這些優化方法并不理想。聚類算法為傳感器的優化選擇提供了一種新途徑,采用k-means聚類算法可對動力相似性的自由度進行自動集結分類,從而避免了對自由度數目的主觀選擇[9]。
針對以上分析,本研究根據結構中各自由度振型的動力相似性,采用k-means聚類算法對自由度進行自動分類,采用有效獨立法實現傳感器的優化布置。以一個懸臂梁和一個懸臂板的數值仿真和一個濾光輪組件的模態試驗為例,對傳感器測點選擇與優化布置方法進行探討,為有效獲得結構敏感振動狀態信息提供參考。
1 基本理論
1.1 計算模型
定義一個n自由度結構動力系統,其運動方程可表示為
(-ω2[M]+iω[C]+[K]X(ω)=F(ω)
(1)
式中:[M]、[C]、[K]分別表示結構的質量、阻尼和剛度矩陣;F(ω)為外載荷向量。對于無阻尼自由振動系統,由n個特征值0≤λ1≤λ2≤…≤λn及其對應的特征向量{φ1,φ2,…,φn}構成的特征方程為
[K]φ=λ[M]φ
(2)
由動力分析模態疊加原理可知,結構的響應可以表示為
{x}=Φ{q}
(3)
式中:{x}為結構的響應向量;Φ為模態振型矩陣,{q}為模態坐標向量。
1.2k-means聚類算法
自由度的動力相似性主要表現為某些自由度在重要模態中的振型值相近,這些自由度在動力載荷作用下的響應也將近似相等。因此,可根據結構中各自由度在重要模態中振型值的相似度進行自動類別劃分。k-means聚類算法是以衡量分類結果的標準測度函數作為聚類分析的收斂條件,標準測度函數通常采用歐氏距離平方和的形式表述
(4)
式中:k為類別總數;φ為屬于第i類振型Φi的振型值;mi為類別Φi的中心。
對k-means算法的步驟具體描述如下:①在振型集合Φ中任選k個樣本作為k個初始聚類中心;②對于其余非聚類中心的振型值,根據他們與這些聚類中心的相似度(歐氏距離),分別將他們劃分至與其最相近的聚類中心所在的類別;③更新每個類別的聚類中心(該聚類中所有振型值的均值);④重復步驟②~③,直至標準測度函數E收斂。
1.3 有效獨立法
有效獨立法(EFI)的基本思想是從所有可能的測點出發,使選擇的測點能保留目標模態具有最大的線性無關性。該矩陣可表述為
Q=φTφ
(5)
根據矩陣行列式最大準則來評價構造的Fisher信息矩陣,采用逐步消除法進行迭代搜索,測點的選擇依賴有效獨立矩陣D,D可表述為
D=φQ-1φT
(6)
D為冪等矩陣,它的跡等于秩,其對角線上的元素Di表示第i個測點對矩陣D的貢獻。每次刪除獨立貢獻最小的值,即
det(Q)=det(Q0)(1-Di)
(7)
式中:Q0為初始Fisher信息矩陣,則在模態振型矩陣φ中刪除對應的列向量,這樣就能從全部的待選測點中逐步刪除有效獨立貢獻最小的測點,保留對振型有效獨立貢獻較大的測點。
2 傳感器聚類優化布置方法設計
傳感器優化布置的目的是使獲得的模態空間估計最佳,常采用模態振型構建反映結構動態特性的Fisher信息矩陣。然而,當兩個傳感器在同一方向上獲得的振型值相近時,選擇一個傳感器即可表征該方向上的振動狀態信息。本研究根據重要模態中振型值的相似性,采用k-means聚類算法對自由度進行自動集結分類,在各聚類自由度中采用有效獨立逐步刪除對目標模態線性支持度較小的測點,最終得到傳感器的最優布置方案。該方法的流程如圖1所示,具體的算法描述如下:
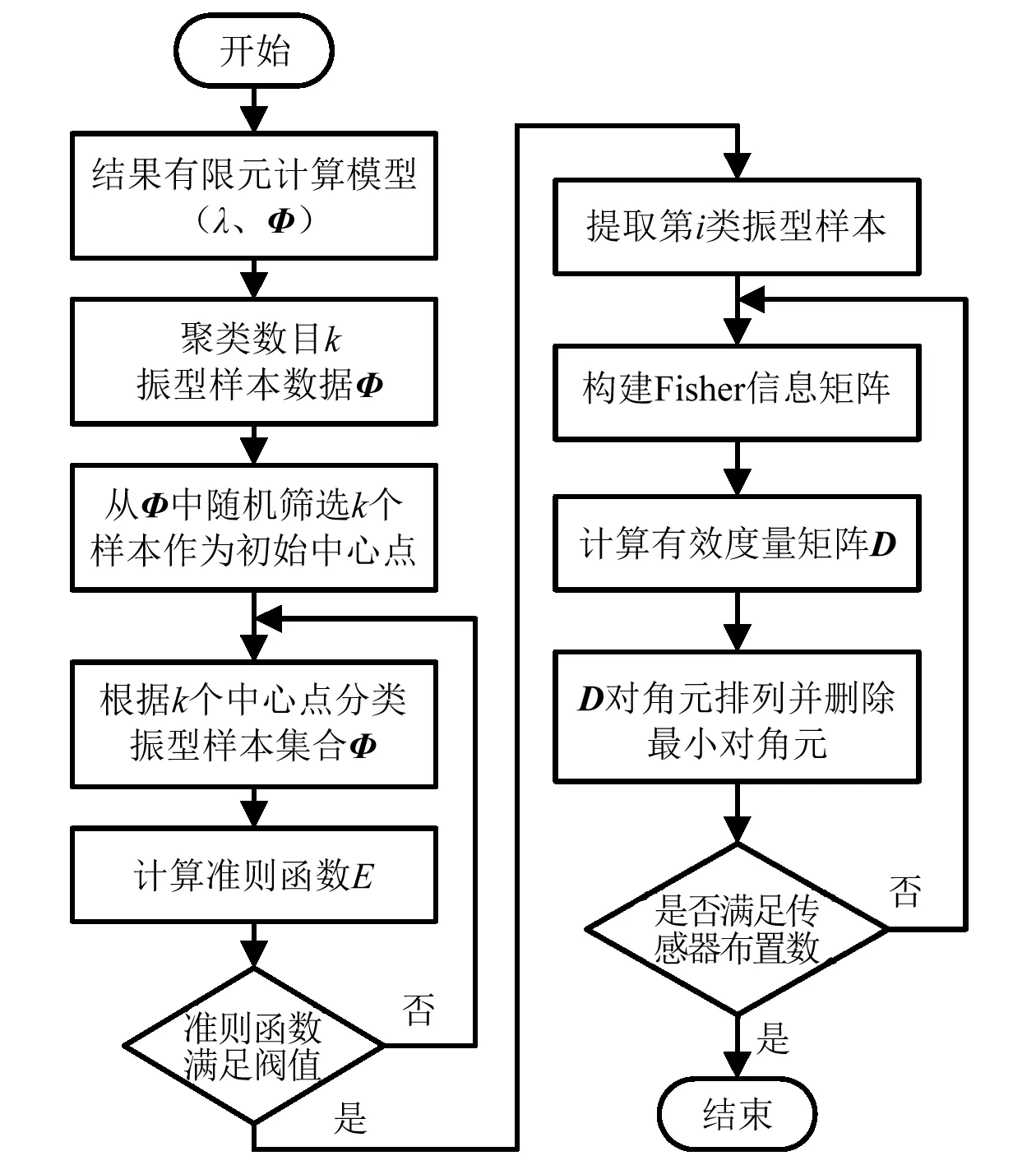
圖1 傳感器優化布置流程圖Fig.1 Flow chart of optimal sensor placement
步驟1 建立結構有限元分析計算模型,確定自由度數Ns,計算結構各階模態振型φ,并選擇出重要模態數Nm;
步驟2 以重要模態振中的振型值作為樣本屬性,采用k-means聚類算法將各自由度進行自動分類,以標準測度函數E為判據,直至準則函數滿足收斂條件;
步驟3 對每一個聚類樣本采用有效獨立法,計算待選傳感器的有效度量D,根據Di大小刪除對應有效獨立貢獻值最小的測點,重復步驟3直到達到要求的測點數,從而以盡可能少的傳感器測量獲得更多的結構振動信息。
3 數值算例
3.1 算例1:簡單梁
分析了文獻[7]中的算例,采用一個懸臂梁用于描述本研究提出方法的數值性能。懸臂梁總長0.530 7 m,矩形截面尺寸為0.003 2 m×0.001 9 m,材料密度為2 700 kg/m3,彈性模量為7.1×1 010 N/m2。有限元模型包含30個單元,總自由度數為60,根據歐拉-伯努利梁理論建立梁單元并計算獲得各階模態振型。模型的示意圖如下所示。前3階模態主要為Y方向的振動,以Y方向的30個自由度前3階振型值為屬性,采用k-means方法進行自由度聚類劃分,聚類數為3。其中,隸屬于相同類別的自由度用相同的符號表示,如圖2(c)。

圖2 懸臂梁的傳感器優化布置Fig.2 Optimal sensor placement of cantilever beam
采用EFI方法分別對文獻[7]中的方法和本研究提出的方法進行比較,其中,迭代刪除后保留5個傳感器位置。傳感器的全局搜索結果與聚類逐步搜索結果見表1,測點布置情況如圖2(a)和(b)。可以看出,本研究提出方法選擇的傳感器位置分布更加均衡,從而有效避免了傳感器之間的聚類情況,使測得的結構信息更加完備。
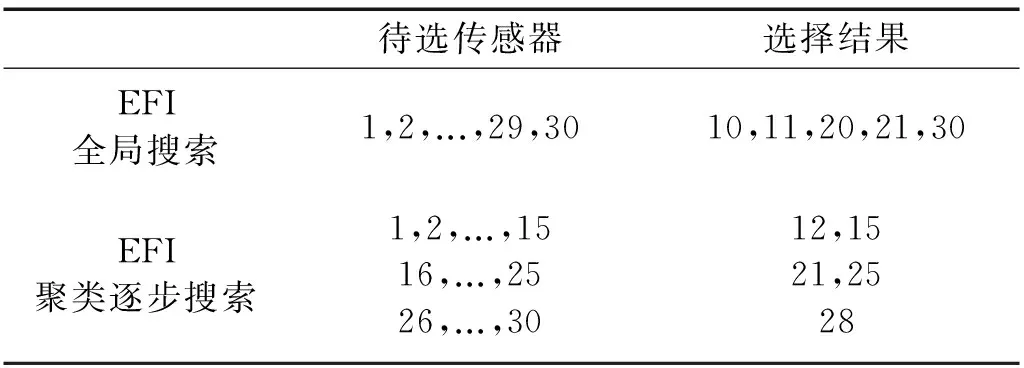
表1 兩種EFI搜索方法的對比結果
3.2 算例2:懸臂板
第二個數值算例采用空間相機的次鏡輻板,單個輻板可簡化為簡單懸臂板結構。如圖3所示,懸臂板包含80個單元,100個節點(長度方向20個節點,寬度方向5個節點)。根據薄板彎曲理論,建立薄板的彎曲單元。板單元的幾何參數分別為:長度a=0.02 m,寬度b=0.02 m,厚度h=0.005 m;材料參數為:彈性模量E=1.47×1 011 N/m2,材料密度ρ=8 180 kg/m3,泊松比v=0.3,通過有限元法求解懸臂板的模態。采用本研究提出的傳感器優化布置過程,當聚類數分別取3和4時,測點的布置結果如圖3所示。從圖中可以看出,絕大多數測點布置在懸臂板的邊緣,當懸臂板劃分更多的聚類數時,測點的布置更加均衡,但計算量更大。
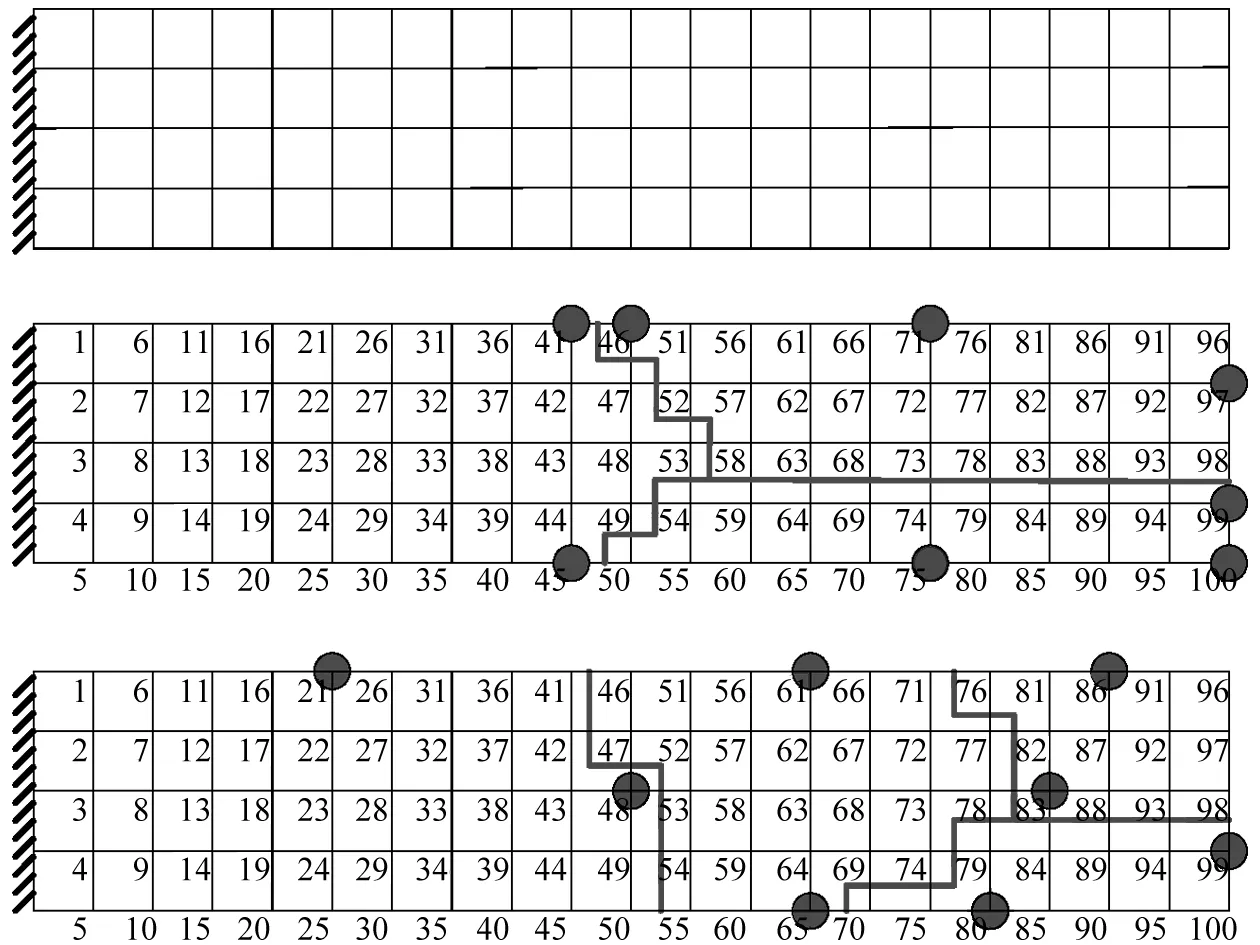
圖3 懸臂板的傳感器優化布置Fig.3 Optimal sensor placement of cantilever plate
4 試驗分析
以空間相機旋轉濾光輪組件為研究對象,開展該組件的模態分析與試驗,重點分析了該組件的傳感器優化布置。首先,構建該組件的有限元模型,建立的有限元模型共有11 144個單元,16 707個節點,如圖4所示。由于結構內部節點無法被測量,因此待選測點僅限于濾光輪支撐結構的上表面,共計935個節點。
對該組件進行模態分析,前六階模態為剛體模態,第七階為軸承旋轉模態,濾光輪的一階彈性模態從第八階模態開始,該結構的前5階彈性模態頻率見表2。對該結構的模態振型描述如下:第一階是沿垂直面的彎曲模態;第二階是沿對角面的彎曲模態;第三階是沿Z方向的上下振動;第四階是沿對角線方向的組合模態;第五階是各方向上各階彎曲模態的組合。
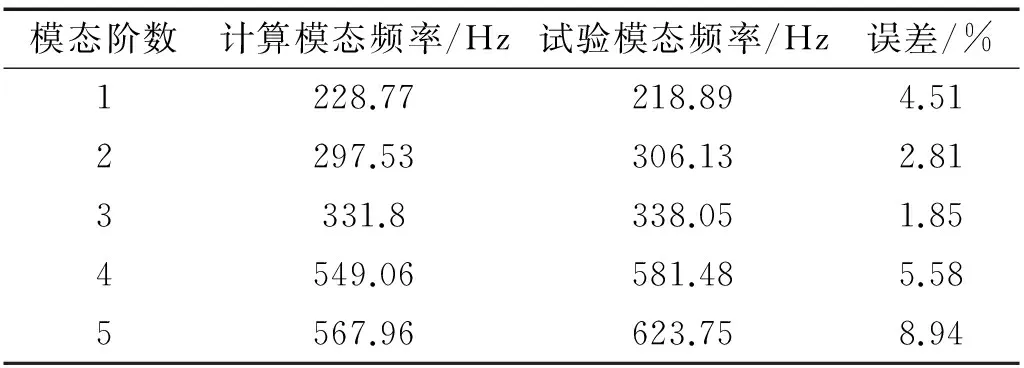
表2 濾光輪組件的前五階模態頻率
采用本研究提出的聚類優化傳感器布置方法從待選測點中選出反映結構主響應特征的測點,傳感器的數目為主要模態的3倍(前五階模態為主要模態),最終獲得的15個傳感器位置如圖4中箭頭所示。
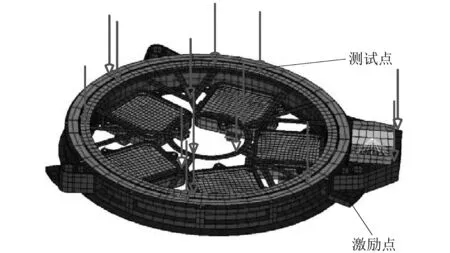
圖4 旋轉濾光輪組件的測點選擇Fig.4 Sensor selection of the filter wheel assembly
為進一步驗證模型的有效性,對濾光輪組件進行模態試驗。綜合上述過程獲得的傳感器位置,為更全
面測得結構的狀態信息,在濾光輪上補充部分傳感器,共采用36個加速度傳感器,其實際測試如圖5所示,采用力錘敲擊圖中所示的激勵點。信號采集設備包括LMS信號采集儀和PCB三向加速度傳感器,采樣頻率為4 096 Hz。多次測量后獲得該結構的模態特征,通過辨識方法獲得的試驗模態頻率見表2,模態測試試驗振型的原始數據見表3。表3中分別列舉了36個測點前五階模態試驗的振型數據。各階振型如圖6所示,從圖中可以看出,濾光輪結構的實測振型與計算模態振型基本相同,說明本研究提出的傳感器布置方法有效。
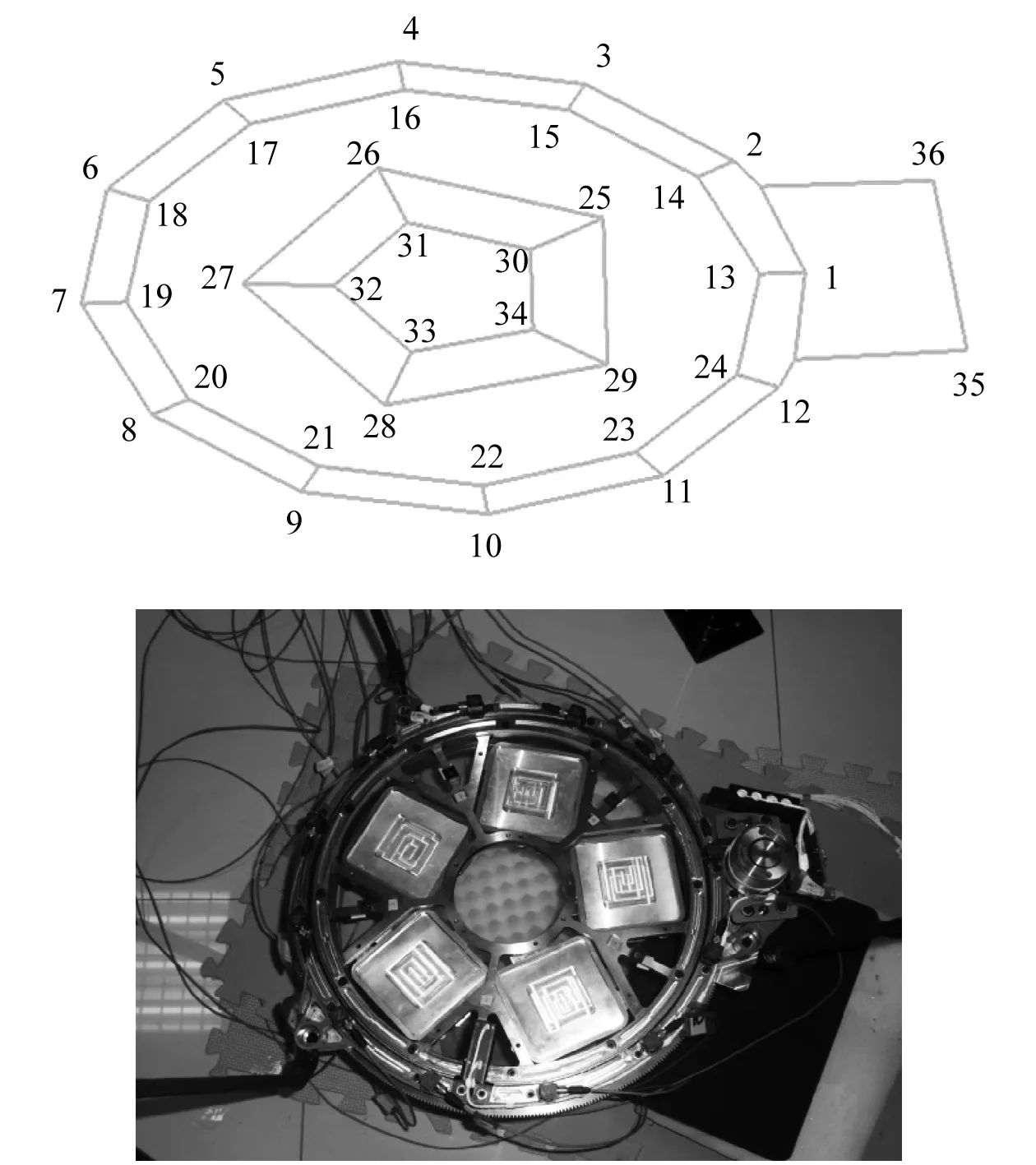
圖5 濾光輪組件的實際測點布置Fig.5 Actual sensor placement of the filter wheel assembly
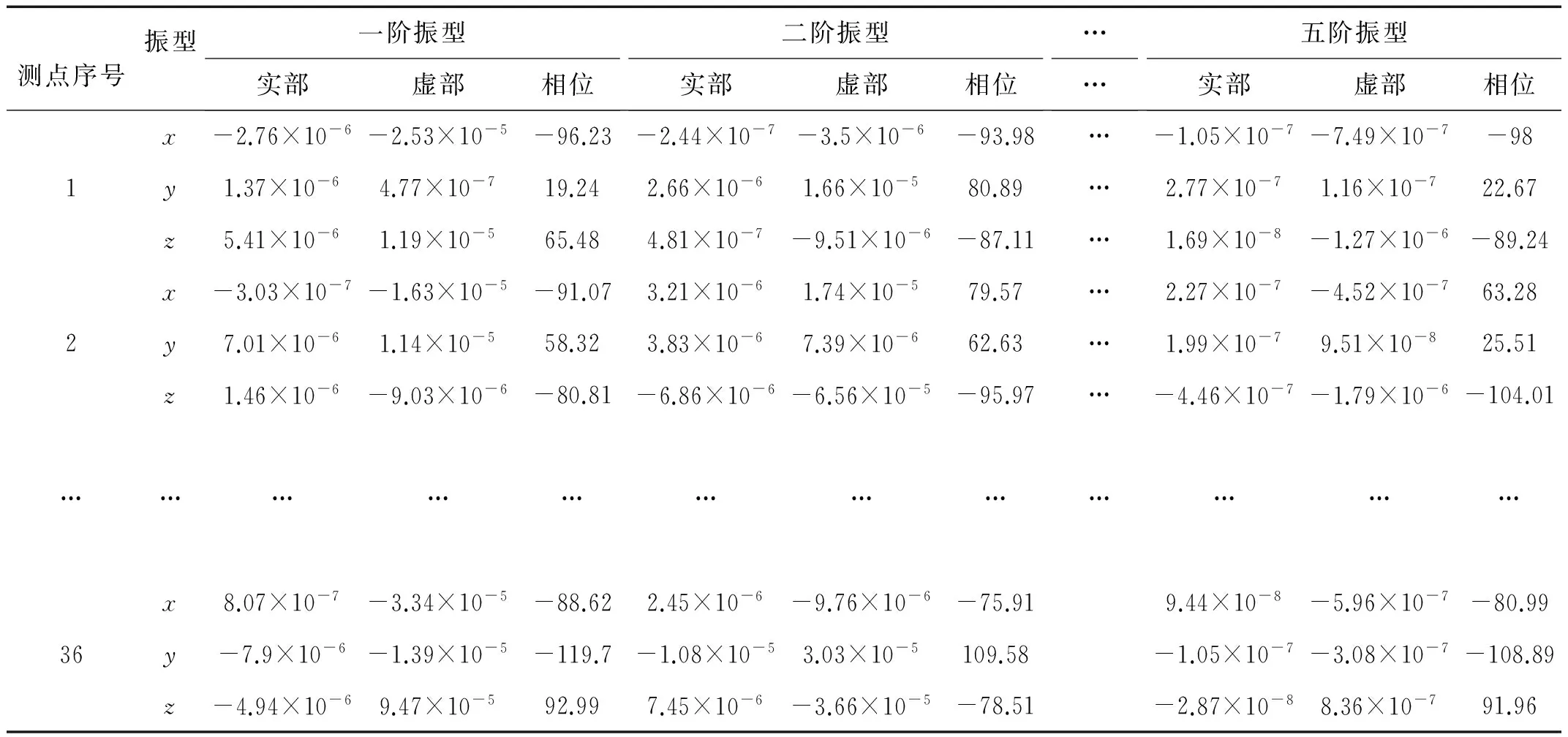
測點序號振型一階振型實部虛部相位二階振型實部虛部相位……五階振型實部虛部相位x-2.76×10-6-2.53×10-5-96.23-2.44×10-7-3.5×10-6-93.98…-1.05×10-7-7.49×10-7-981y1.37×10-64.77×10-719.242.66×10-61.66×10-580.89…2.77×10-71.16×10-722.67z5.41×10-61.19×10-565.484.81×10-7-9.51×10-6-87.11…1.69×10-8-1.27×10-6-89.24x-3.03×10-7-1.63×10-5-91.073.21×10-61.74×10-579.57…2.27×10-7-4.52×10-763.282y7.01×10-61.14×10-558.323.83×10-67.39×10-662.63…1.99×10-79.51×10-825.51z1.46×10-6-9.03×10-6-80.81-6.86×10-6-6.56×10-5-95.97…-4.46×10-7-1.79×10-6-104.01………………………………x8.07×10-7-3.34×10-5-88.622.45×10-6-9.76×10-6-75.919.44×10-8-5.96×10-7-80.9936y-7.9×10-6-1.39×10-5-119.7-1.08×10-53.03×10-5109.58-1.05×10-7-3.08×10-7-108.89z-4.94×10-69.47×10-592.997.45×10-6-3.66×10-5-78.51-2.87×10-88.36×10-791.96
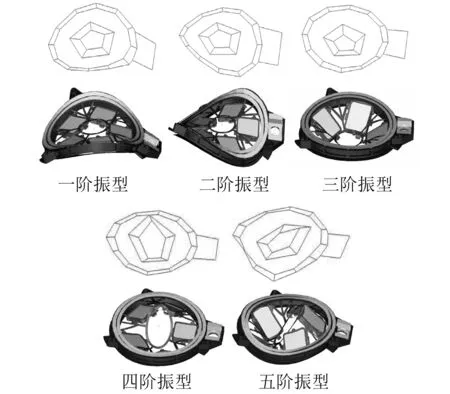
圖6 濾光輪組件的前五階模態振型Fig.6 The first five modal shape of the filter wheel assembly
5 結 論
為實現有限數量的傳感器最大程度反映結構系統信息,本研究提出了一種聚類優化的傳感器布置方法。該方法以結構主模態振型值為屬性,采用k-means聚類算法對各自由度進行自動分類,采用有效獨立法從各聚類自由度中篩選出模態分辨率最高的測點作為實際的測量位置。一個懸臂梁和一個懸臂板的數值算例分析結果表明,采用本研究提出的傳感器優化布置方法能使結構上布置的測點分布更加均衡;當選取更多的分類數時,獲得的布置測點更加精細,卻增加的計算量。某型號航天器旋轉濾光輪組件的動力學試驗驗證分析結果表明,本文提出的傳感器優化布置方法能有效獲取獨立敏感性測點,并且具有較高的迭代搜索效率,該方法能為復雜結構航天器的傳感器優化布置提供了一種新途徑。
[1] 丁繼鋒,韓增堯,馬興瑞. 大型復雜航天器結構有限元模型的驗證策略研究[J]. 宇航學報, 2010, 31(2): 547-555. DING Jifeng, HAN Zengyao, MA Xingrui. Finite element model verification strategy of large complex spacecraft [J]. Journal of Astronautics, 2010, 31(2): 547-555.
[2] 秦仙蓉. 基于靈敏度分析的結構計算模型修正技術及相關問題研究[D]. 南京:南京航空航天大學,2001.
[3] KAMMER D C. Sensor placement for on-orbit modal identification and correlation of large space structures [J]. Journal of Guidance, Control and Dynamics, 1991, 14(2): 251-259.
[4] KAMMER D C, TINKER M L. Optimal placement of triaxial accelerometers for modal vibration tests [J]. Mechanical Systems and Signal Processing, 2004, 18(2): 29-41.
[5] HEMEZ F M, FARHAT C. An energy based optimum sensor placement criterion and its application to structural damage detection [C]∥ Proceedings of the 12th International Conference on Modal Analysis, Society of Experimental Mechanics. Honolulu, Hawaii, 1994.
[6] PAPADIMITRIOU C, BECK J L. Entropy-based optimal sensor location for structural model updating [J]. Journal of Vibration and Control, 2000, 6(5): 781-800.
[7] FRISWELL M I, TRIGUERO R C. Clustering of sensor locations using the effective independence method [J]. AIAA Journal, 2015, 53(5): 1388-1390.
[8] SEONGMIN C, SUNGMIN B, KIM K O, et al. Structural system identification using degree of freedom-based reduction and hierarchical clustering algorithm [J]. Journal of Sound and Vibration, 2015, 346 (25): 139-152.
[9] 李成濤,肖儀清,歐進萍. 基于聚類算法和自由度集結的柔性結構模型降階研究[J]. 計算力學學報, 2012, 29(2): 236-241. LI Chengtao, XIAO Yiqing, OU Jinping. Study on the model reduction for flexible structure based on clustering algorithm and DOFs concentration [J]. Chinese Journal of Computational Mechanics, 2012, 29(2): 236-241.
Optimal sensor placement by using clustering method
ZHANG Heng, LI Shiqi, LIU Shiping, ZHANG Zhe, WANG Yue
(School of Mechanical Science and Engineering, Huazhong University of Science and Technology, Wuhan 430074, China)
The match of experimental/theoretical models of complex structures is an important part in modal parameter modification. To measure and obtain the best information, a clustering optimal method for sensor placement was proposed. The method can effectively avoid the information redundancy when using a limited number of sensors. According to the dynamic similarity of the mode shape values in important modes, the DOFs were auto-clustered by usingk-means clustering algorithm. The effective independent method was used to search out the sensor locations with the highest modal resolution from each cluster. Finally, the numerical analyses on a cantilever beam and a cantilever plate and the modal test of a filter wheel assembly were carried out to verify the optimization method. The results show that the method can effectively select the independent sensitive locations with a much higher search efficiency.
sensor placement;k-means clustering; effective independent method; modal test; model validation
國家重大科技專項
2016-02-29 修改稿收到日期: 2016-05-30
張恒 男,博士生,1988年生
劉世平 男,博士,副教授,1971年生
TH113.1
A
10.13465/j.cnki.jvs.2017.14.009
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
哲學評論(2021年2期)2021-08-22 01:53:34
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中華詩詞(2019年7期)2019-11-25 01:43:04
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
湖北經濟學院學報·人文社科版(2015年8期)2015-12-29 05:53:07
現代企業(2015年9期)2015-02-28 18:56:50
上海電機學院學報(2015年4期)2015-02-28 14:30:00
