基于空間可視性的星球表面巡視路徑分析
2017-07-18 11:00:01蘇慶華李俊韜眭曉虹袁春柱
航天器工程 2017年3期
蘇慶華 李俊韜 眭曉虹 袁春柱
(1 北京物資學院信息學院,北京 101191)(2 智能物流系統北京市重點實驗室,北京 101191) (3 航天東方紅衛星有限公司,北京 100094)
?
基于空間可視性的星球表面巡視路徑分析
蘇慶華1,2李俊韜1,2眭曉虹3袁春柱2
(1 北京物資學院信息學院,北京 101191)(2 智能物流系統北京市重點實驗室,北京 101191) (3 航天東方紅衛星有限公司,北京 100094)
針對巡視器在著陸區內巡視效率和安全巡視率低的問題,利用著陸器相機在懸停階段獲取的實時數字高程模型(DEM)地形數據,結合并依據巡視器的結構特點、越障能力、空間可視性、科學探測價值等,提出了一種對整個區域的巡視路徑分析方法。仿真結果表明:在月球巡視器結構及越障能力已知的情況下,該分析方法能提供一種可靠、高效的初始巡視路徑,可為星球表面巡視規劃提供參考。
空間可視性;越障能力;著陸區域DEM地形;初始巡視路徑
1 引言
星球探測是當前空間探測的熱點,著陸器在復雜的星球表面安全著陸后,即將展開對星球就位科學探測。以月球探測為例,月球巡視器(月球車)是著陸器所攜帶的探測儀器之一[1],它是月面就位探測的主要設備,它的安全巡視是順利對月球就位探測的關鍵。通常情況下,巡視器路徑規劃都是利用巡視器的導航相機得到全局信息并下傳后,利用一次性的全局規劃得到一條起點到目標點的安全路徑,并對行駛過程中的某些性能指標進行優化[2]。但對于空間星球就位探測,受巡視器結構限制,巡視器導航相機獲得的星球表面信息往往不如著陸器攜帶相機獲取的星球表面信息大,因此,需要利用著陸器攜帶相機獲取的星球表面圖像信息進行基于可視性巡視路徑分析研究。
當前國內外所研究的巡視路徑的分析,都是集中在巡視器自身的導航相機獲取圖像信息,根據巡視器的越障能力進行的研究[3-5]。這些研究都是在沒有預先規劃的情況下進行,為了提高星球表面巡視的效率,本文提出一種利用著陸器攜帶相機獲取的圖像信息,基于空間可視性的巡視器巡視路徑的方法,空間可視性表示為巡視器在巡視過程中對巡視點的可見能力。它是基于可視性分析的最優路徑分析方法,是一種以地形可視性信息為主的最優路徑搜索[6-7]方法,對星球就位探測具有重要意義。
本文主要通過著陸器攜帶的導航相機獲取圖像信息得到的DEM地形數據[8],根據空間可視性及巡視器的結構對路徑進行規劃,并通過仿真生成的月球探測著陸器攜帶相機圖像仿真分析了該方法的可行性。
2 巡視可視性與可達性
巡視器是為完成一定的探測任務的星球探測巡視儀器。巡視器巡視過程中利用CCD相機對星面信息的獲取關注兩個問題:一是能否看到;二是能看到多少。為了實現既能看到,而且看到的要多(獲取更詳細的星球表面資料),要求巡視器在巡視過程中的可視域要盡可能大;為了能讓巡視器安全行駛,要求從一個巡視點可以不重復地到達另一個巡視點,使得每個巡視點都應該可達。對于巡視可視性是在數據量一定的地形上進行分析,因此可以忽略星球曲率的影響。
2.1 巡視可視性
巡視的可視性是由視域的大小決定。視域是指某個特定的視點在觀測范圍內能夠看到的地形區域[9]。觀測范圍內是否能看到即是否通視是根據地形高程或斜率(坡度)判斷(見圖1)。可視半徑R是某視點與它通視的最遠地形點的平面距離。觀測范圍是以某巡視點為圓心,以R為半徑的區域,通常記為關注區域(RegionofInterest,ROI)見式(1)。觀測范圍內的點(如圖1中目標點A與目標點B)對于巡視點并不都可視,判斷巡視點O對觀測范圍ROI(O)內的任意點Pr是否可視(LineofSight,LOS)用LOS(O,Pr)函數表示[10]。在上述概念的基礎上,巡視點O的視域用V(O)表示。
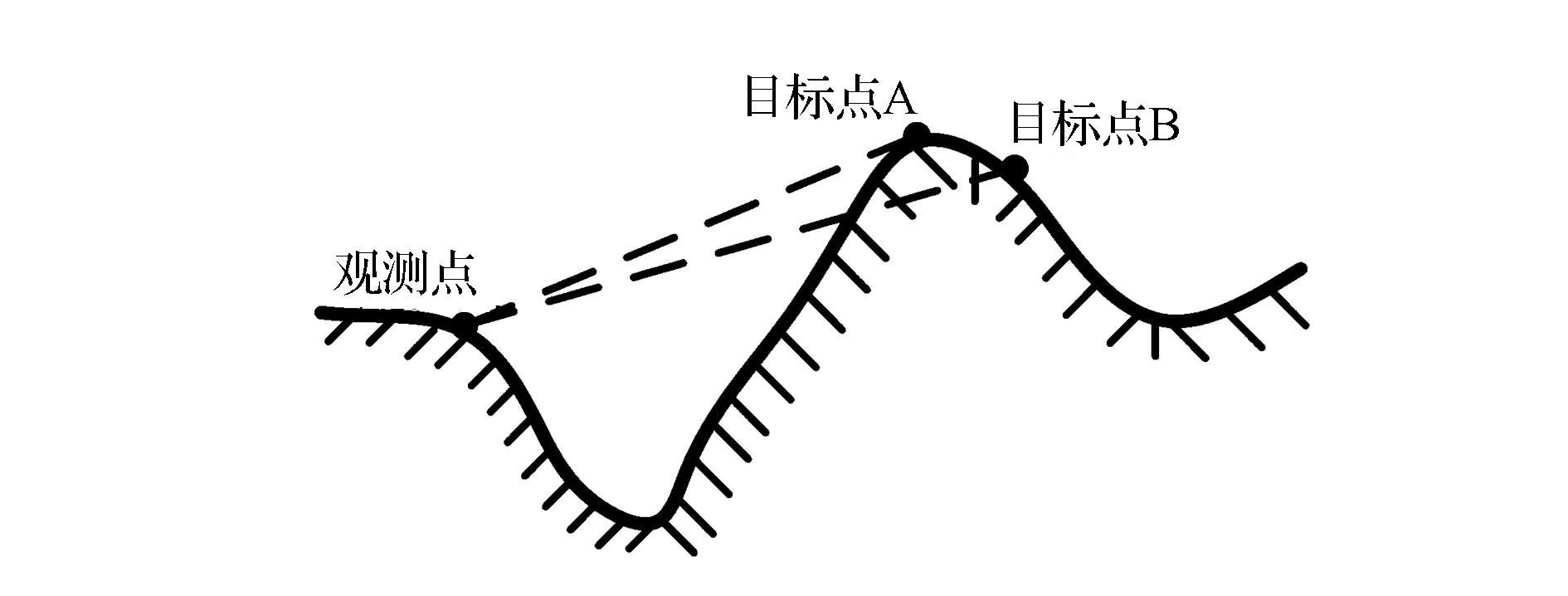
圖1 觀測點與目標點之間的視線被阻擋Fig.1 Line of sight between observation point and target point is blocked
ROI(O)={Pr|dist(O,Pr)≤R}
(1)
式中:dist(O,Pr)為O點到Pr之間的距離。
(2)
V(O)={Pr|Pr∈ROI(O),LOS(O,Pr)=1}
(3)
巡視過程中對于巡視路徑上的每一個巡視點所構成的集合Ω,它的視域是巡視過程中巡視點Oi(i=1,2,3,…)視域的集合記為V(O)。因為各巡視點Oi(i=1,2,3,…)間的視域會存在重疊,因此總視域是各個巡視點視域的并集[6]。即
V(Ω)=∪{V(Oi)|Oi∈Ω}i=1,2,3,…
(4)
2.2 巡視可達性
為了能安全巡視,要求滿足可視性要求的巡視點均可達。由視點間的通視性可知,兩點可視性由兩點之間的高度差或坡度所決定。星球探測著陸器所攜帶的巡視器能是滿足一定的越障能力[11]。結合參考文獻[11]與上述的可視性分析相結合,可將越障能力分為兩類:一類為爬坡能力(圖2),另一類為越坑能力(圖3),主要由巡視器結構(巡視器的前后輪軸間距,巡視器重心離地高度和巡視器擺臂的長度[11])所決定。
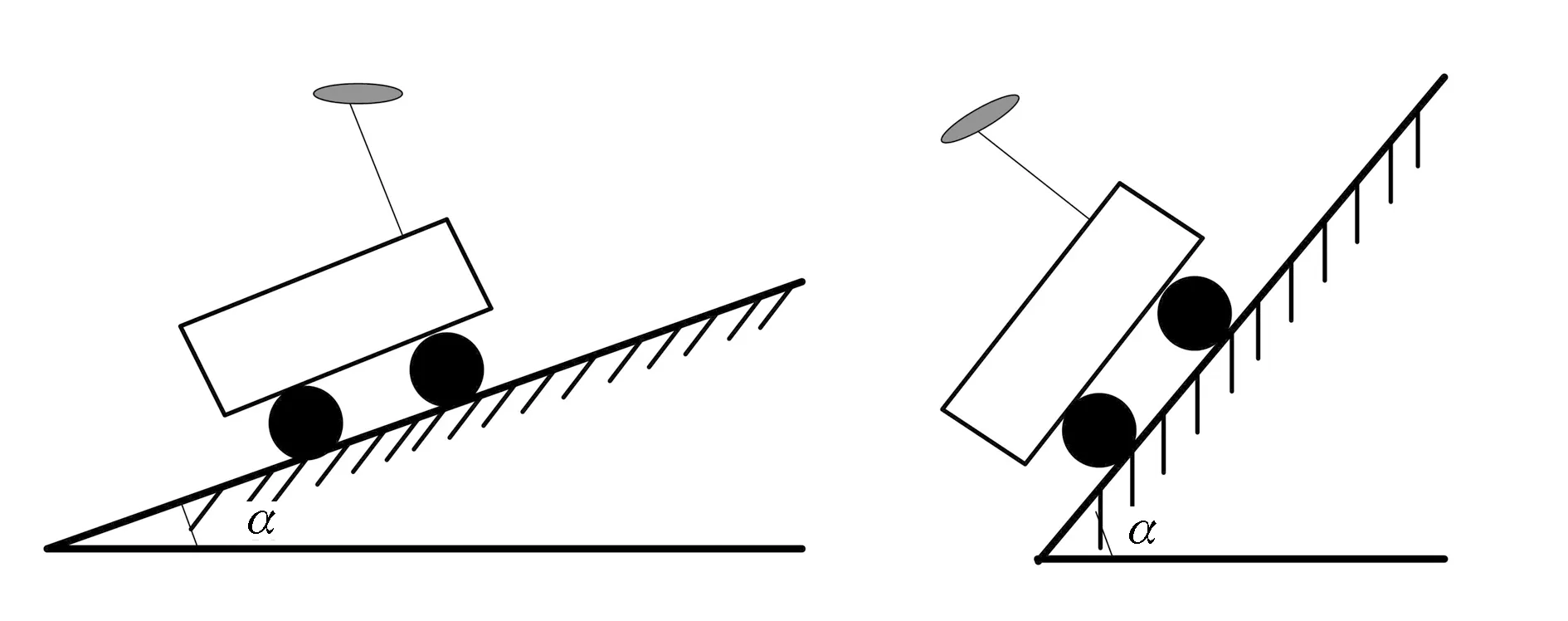
圖2 星球巡視器爬坡能力示意圖Fig.2 Diagram for rover patrol climbing
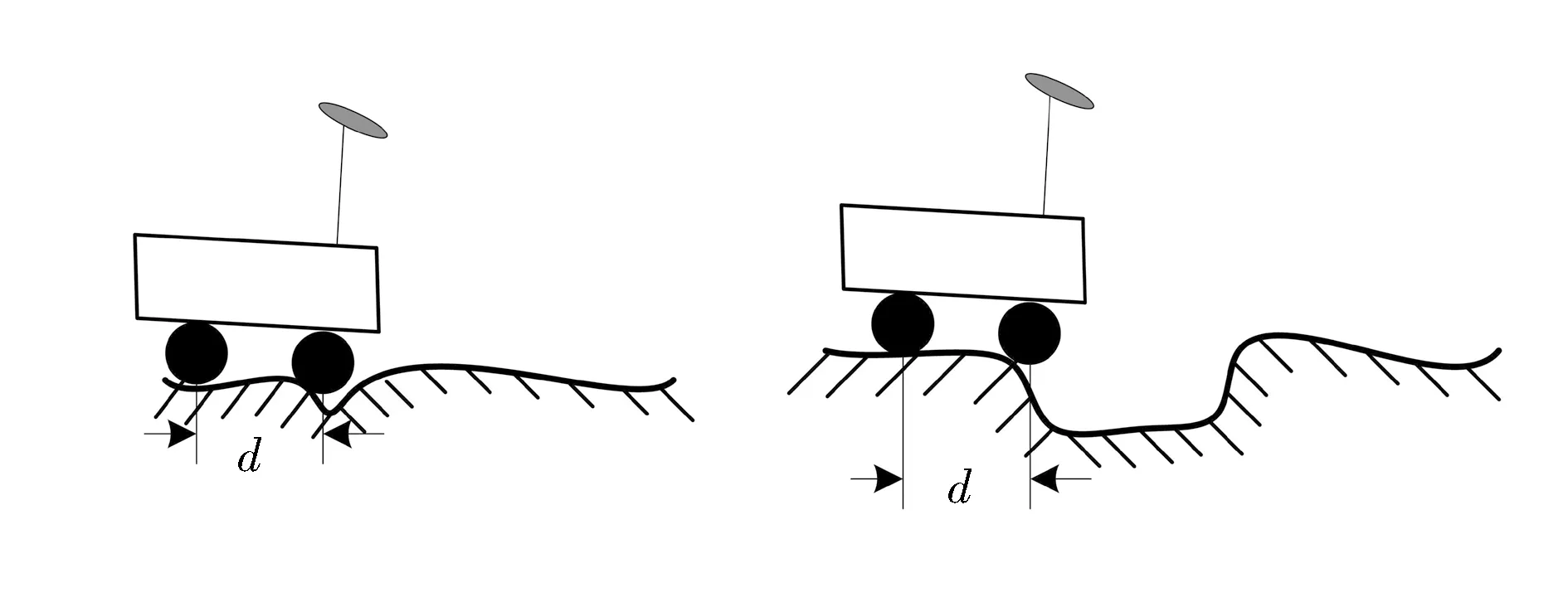
圖3 星球巡視器越坑能力示意圖Fig.3 Diagram for rover patrol across pits
設巡視器能爬坡的坡度閾值為α0,任意兩點之間的坡度表示為slope(pi,pi+1),在圖2中以α表示,則對于兩個巡視點之間的巡視路徑上的每點{p1,p2,…,pk}對于巡視可達的第一條件可以描述為
slope(pi,pk)}≤α0
(5)
假設巡視器越坑能力的距離閾值為d,在圖3中以巡視器兩輪間距表示,pi(Z)(i= 1,2,3,…,k)表示路徑點pi所對應的高程值,dist(pi,pi+1)表示兩路徑點之間的剖面距離對于巡視可達的第二個條件,則對于兩巡視點之間路徑上的每點{p1,p2,…,pk}對于巡視可達的第二個條件可以描述為[11]
pi(Z)=pi+t(Z)(i+t≤k)(t∈{1,2,3,…,
(k-i)}),且max{dist(pi,pi+1),dist(pi,pi+2),
…,dist(pi,pi+t)}≤d
(6)
3 路徑規劃原則
3.1 可視性路徑規劃原則
假定星球面DEM數字柵格地形上的路徑為L= {p1,p2,…,pk}。路徑點pi的視域記為Vpi(Ω),則所有路徑點視域的并集式(7)為巡視路徑L的視域,路徑視域的地形點數與柵格單位面積Δs的乘積式(8)表示路徑L的可視覆蓋面積。
VL(Ω)=∪{Vpi(Ω)|pi∈L}
(7)
AL=Area(VL(Ω))=ΔsVL(Ω)
(8)
巡視路徑最優可以考慮為路徑中每個巡視點的平均視距最大作為一個指標。主要考慮可視覆蓋面積和路徑長度兩個優化項,要求路徑的可視覆蓋面積盡可能大,而路徑長度盡可能短。路徑L的平均視距RaL定義為路徑可視覆蓋面積AL與路徑長度的比值:
(9)
優化方法一般是建立求最小目標的數學模型,因此可將平均視距的倒數作為求解問題的目標函數。
(10)
在柵格化的星球表面,柵格單位面積是常數,所以目標函數可表示為
(11)
3.2 可達性路徑規劃原則
巡視過程中巡視觀察點(節點)還必須滿足巡視節點可達。設巡視巡視器可爬坡的坡度閾值為α0,越坑能力距離閾值為d,則無論爬坡還是越坑,都可以等效為一個模型。
路徑為L={p1,p2,…pk}。路徑點pi與路徑點p(i+d)的坡度記為αpi(其中i=1,2,…,(k-d)),則對應路徑L中最大坡度為所有路徑點坡度的最大值max(αpi),路徑L可達則要求最大坡度小于巡視器可爬坡閾值α0,可以描述為
(12)
由優化方法一般是建立求最小目標的數學模型可將dist(pi,pi+d)的作為該問題的目標函數。
(13)
4 基于可視性巡視路徑規劃
4.1 巡視節點的選擇
巡視過程中觀察點的選擇可以選擇著陸器攜帶相機所獲取圖像區域中的每一點,優點是在巡視過程中可以獲取整個區域內的詳細信息,缺點是計算量、存儲量大,實現困難。若任意選擇觀測點,可以進行任意點的可視分析,但缺少全局的分析,不能滿足某些星球面就位探測的要求,例如獲取盡可能多的星球表面圖像詳細信息。為能夠較好地完成星球就位探測任務,對于巡視觀測點的選擇應結合路徑規劃的原則進行。
在巡視過程中地形中每個觀察點的視域可以覆蓋多個地形點,同時從一個觀察點可以到達多個觀察點。從星球表面地形區域的任意一個可視可達觀察點開始,每次在眾多可視可達的觀察點中選擇最大總視域max{Vpi(Ω)}對應的點為觀察點。重復這一過程,就可以得到觀察點集合。在觀測點的選擇是根據路徑規劃原則,利用LOS可視,得到單點可視域,進而判斷觀測點,得到巡視觀察點集。具體實現步驟如下:①構造星球表面DEM數據下的LOS剖面(圖4);②確定星球表面DEM地形中每一點坐標位置;③利用雙增量法LOS可視[12]計算LOS剖面可視;④將得到的LOS平面沿V軸旋轉;⑤重復步驟②,③,④;⑥得到某一點巡視點的可視域;⑦選擇滿足式(5)和式(6)的星球表面地形點,重復②至⑥,得到滿足條件地形點的可視域;⑧利用式(4)計算選定巡視點與每個待定巡視點的總視域;⑨比較所得到的總視域,選擇最大的視域對應的待定巡視點為下一巡視點。
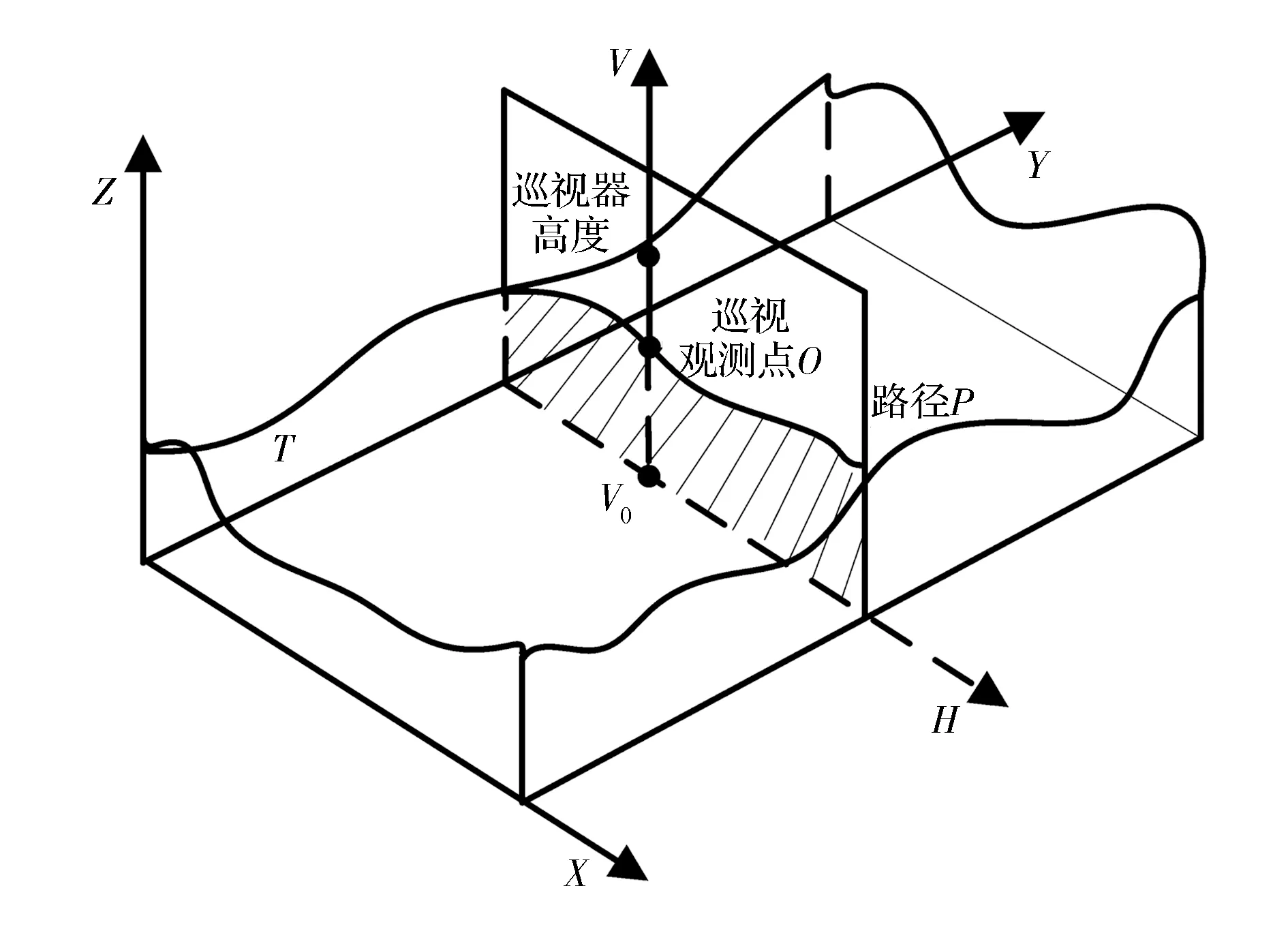
圖4 星球表面地形切割構造LOS剖面圖Fig.4 LOS profile for the stellar surface topography cutting structure
該方法以巡視路徑規劃的原則為出發點,利用地形點的視域為啟發信息,結合巡視器的巡視目的保留視域大的觀察點,減少了對地形中每一點的視域分析,從而使得該算法的時間復雜度也大為降低。
4.2 巡視子區域的劃分與排列
巡視除了上述考慮的可視域與可達性外,還需要考慮的因素就是區域探測的重要性和能耗。在選定區域內的巡視觀察點后,到達每個觀測點的先后順序與巡視任務和巡視器的工作狀態相關(主要就是能源供給)。由于外太空能源受限,巡視器工作是靠所攜帶的能源和星球表面太陽能來維持正常工作。因此為了能更好地完成巡視任務,規劃巡視路徑時可以把星球表面著陸區域按科學研究價值的大小對整體區域進行劃分。科學研究價值通過在某區域內撞擊坑和石塊的個數來判斷[13-14]。劃分的方法采用折半方法。假設整個巡視區域為N×M的柵格數據,則區域面積為N×M×Δs,Δs為單位柵格面積。對此N×M的柵格區域進行劃分,劃分子區域包含n×m個柵格數據,其中n≤N,m≤M,則劃分區域單位面積上撞擊坑個數Cm,n和巖石的個數Rm,n以函數am,n表示。
(14)
劃分時,當am-1,n≤am,n≤am+1,n或am,n-1≤am,n≤am,n+1,則劃分區域完成。
其次,區域排序,通過確定每個區域的研究價值和估算所劃分的區域巡視代價,即巡視器在該區域內巡視安全的概率,進行巡視區域排列。
對于劃分的每個區域Qm,n,利用兩項綜合指標進行評價,采用權重加權平均(式(15))得到值按大到小進行排列,即為巡視區域的先后順序。若每個區域的加權值相同,為提高巡視效率節約能源,可以采取“N”或“Z”的順序,本文采用按照圖5所示“Z”字順序進行巡視。采用該巡視的優點在于,當對指定區域巡視完畢后,可以更多地獲取不在路徑規劃范圍內的未知星球表面地形信息。
(15)
式中:αm,n表示地形科學性權重;βm,n表示地形耗能權重。
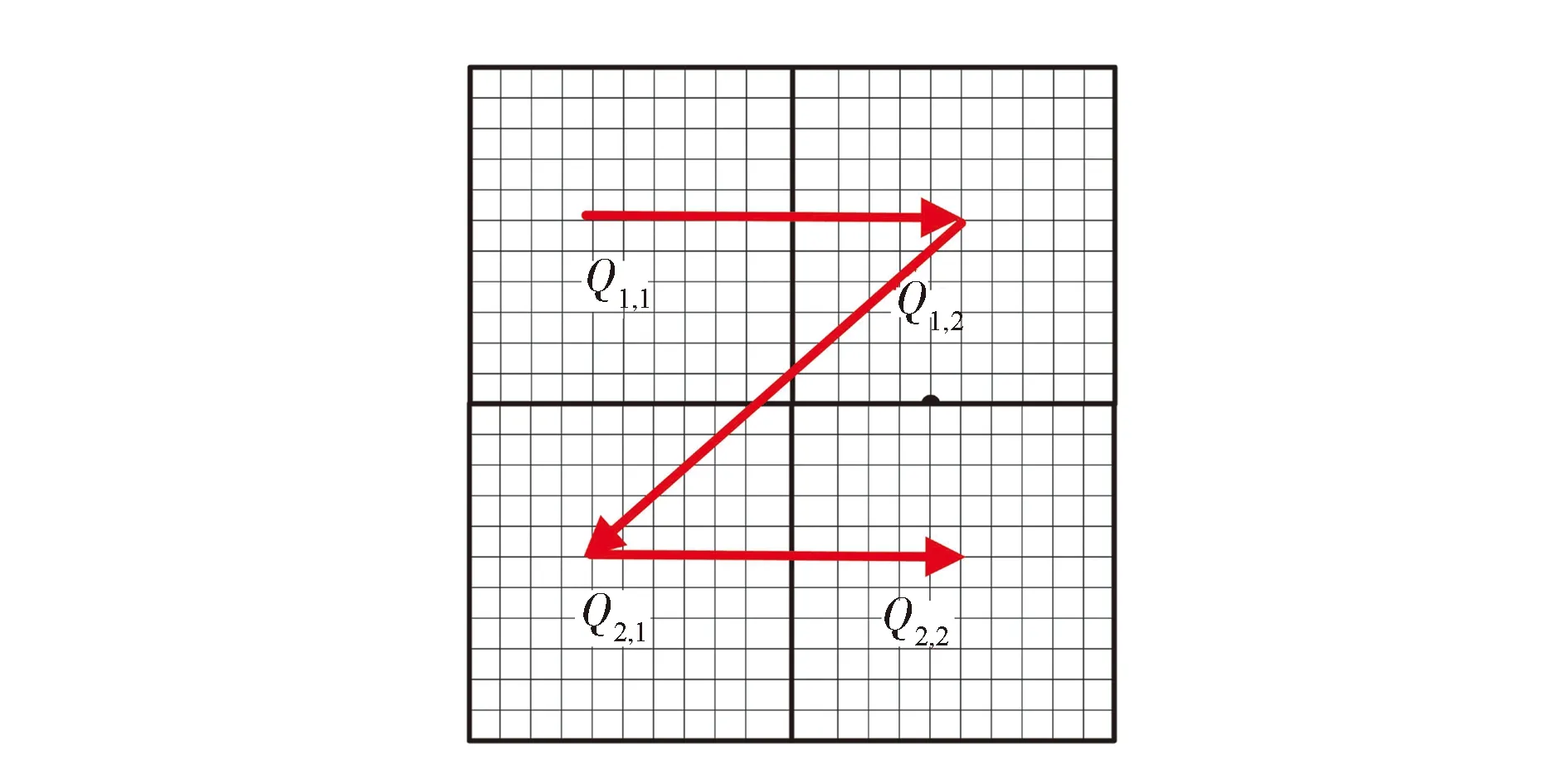
圖5 加權相同時巡視順序Fig.5 Patrol order with same weight
4.3 巡視路徑規劃
為了形成完整的路徑,需要對劃分的每個子區確定巡視入點及巡視出點。入點對應子區域中路徑段的起點,而出點對應子區域路徑段的終點。由于相鄰區域的巡視入點與另一區域的巡視出點在滿足可視性和可達性的原則下有多種路徑。例如若子區域Q1,1的巡視順序在子區域Q1,2之前。子區域Q1,1的觀測點C1作為該子區域的出點,Q1,2內的觀測點C2,C3,C4與C1構成的路徑有多種,圖6給出了幾種不同的路徑,在這些路徑中必須選擇一條最優的路徑才能完成對整個巡視路徑的規劃。
因此,需要對每個子區域進行路徑規劃,確定出每個子區域的入點及出點。對于每個子區域路徑應在滿足式(11)的前提下,按照最短路徑進行動態規劃。從巡視入點出發的路徑,如果已經得到從另一個巡視點(中間巡視點)到巡視出點的最短路徑,那么,從子區域入點到出點的最短路徑就取決于中間巡視點與入點的路徑,然后,再根據每個子區域科學探測的重要性和能耗進行權重計算,再結果進行子區域路徑鏈接。該路徑采用成熟的Dijkstra算法[15-17]完成巡視路徑的規劃。
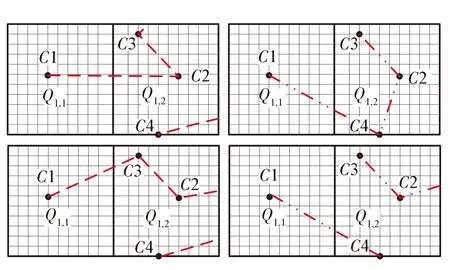
圖6 相鄰區域巡視路徑Fig.6 Patrol route for neighbor areas
這樣,首先通過確定巡視區域內的每一個觀測點;然后確定每個子區域巡視的順序,最后確定每個區域的入點及出點,按照巡視順序利用可達標準選擇路徑上的點就可以得到整個巡視路徑。
5 試驗分析
該方法通過仿真生成的懸停階段月面圖像進行驗證,設月球著陸器云臺相機獲取的月面圖像如圖7(a)所示,經圖像處理得到月面三維數字地形如圖7(b)所示,地形的大小為100m×100m,DEM柵格數據的精度為10cm。月球巡視器的爬坡能力為30°,月球巡視器越坑能力距離閾值為30cm,月球巡視器的高度為60cm,巡視器的通視半徑為25m。
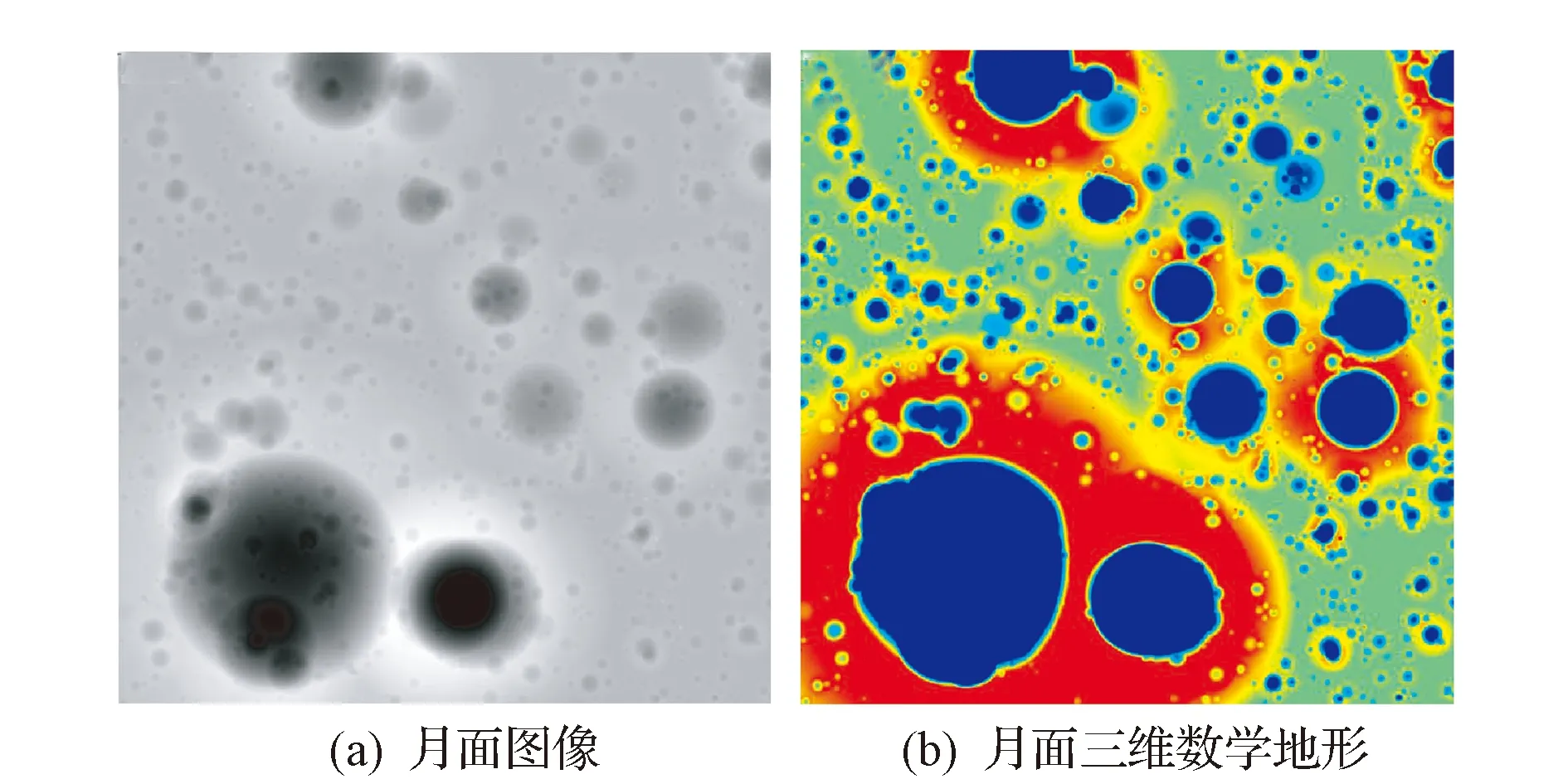
圖7 100 m×100 m仿真月面三維地形圖Fig.7 Simulated lunar surface with area of 100m×100m
該月面DEM數字地形中,撞擊坑的個數C100,100為999,巖石的個數R100,100為255,地形研究價值的權值設置:地形中含有大的撞擊坑(直徑大于30m),則該地形的權值為3;地形中撞擊坑分布多(單位面積大于1),權值為2;地形中月面巖石的個數較多(單位面積大于1),權值為1;其它情況權值為0。巡視代價權值設置:平均坡度大的區域,權值為1;可視域小的區域,權值為2;巡視路徑長的區域,權值為3;其它情況權值為0。
(1)巡視觀測點的選擇。利用雙增量LOS可視確定單點可視域,結合視域最大和巡視可達的條件選擇的地形區域巡視觀察點,見圖8(a)。
(2)巡視子區域的劃分及排序。根據區域劃分的原則,對所區域劃分為4個區域,根據研究價值權值和巡視代價權值該區域的巡視順序,見圖8(b)。
(3)巡視路徑。由各區域內巡視路徑的規劃得到子區域的入點和出點;根據區域巡視順序從而得到完整巡視路徑,見圖8(c)、(d)。
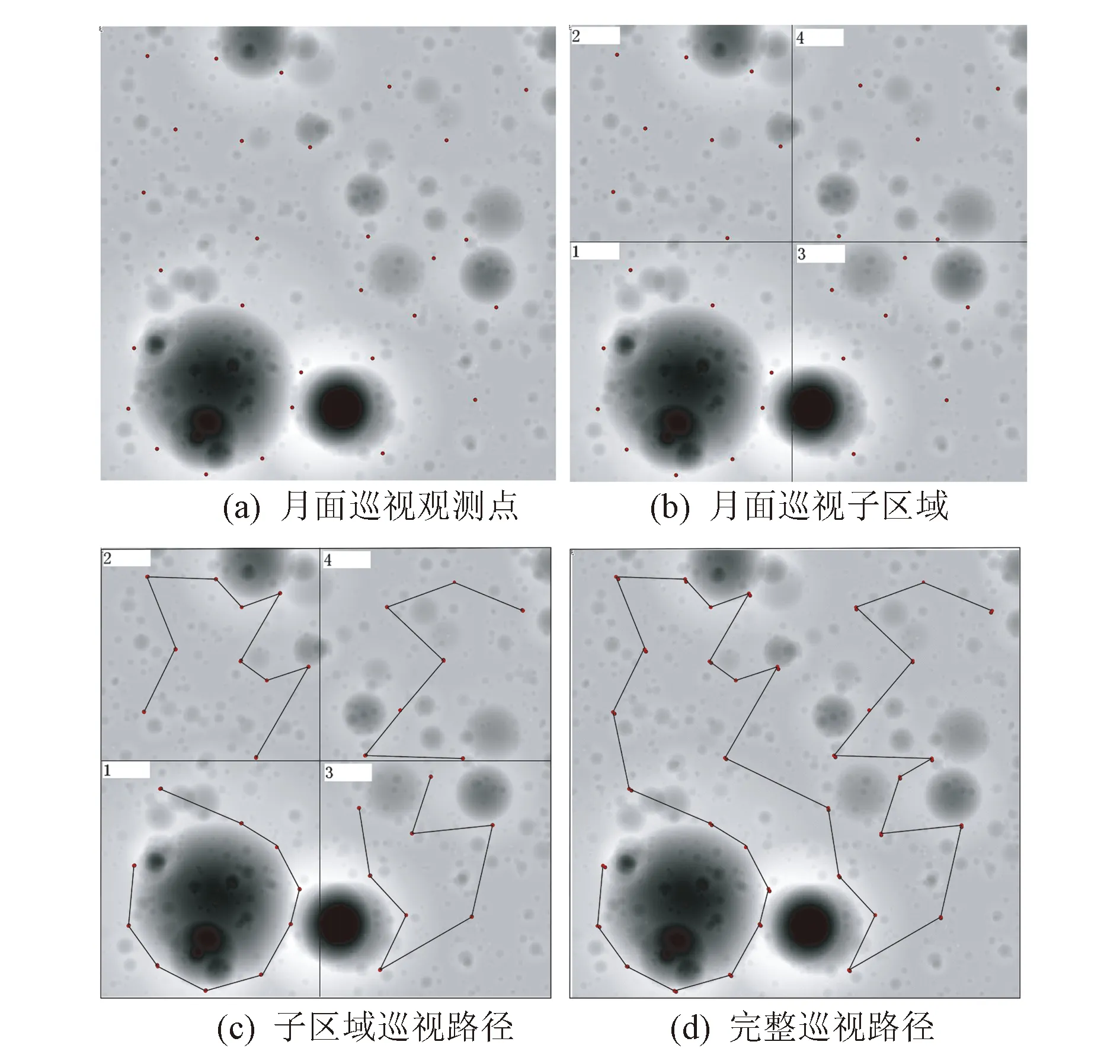
圖8 月面巡視路徑實驗分析結果圖Fig.8 Results of lunar surface patrol route simulations
6 結束語
本文中所論述的路徑分析方法,是針對星球探測著陸器軟著陸后巡視器對星球表面巡視探測的巡視路徑需求,為了提高巡視安全性和有效性,提出一種基于空間可視性的巡視路徑分析方法,它具有以下特點:①由于該方法用在巡視器巡視前,避免了實時巡視過程中的盲目性;②由于該方法基于空間可視性并考慮了巡視器的越障能力,能提高巡視器的安全性。本文提出利用探測著陸器著陸懸停階段獲取的著陸區域星球表面圖像,根據巡視器結構,提出一種基于空間可視性的巡視路徑分析方法,并以仿真生成的月球著陸器攜帶相機圖像對月球巡視器的巡視路徑進行了路徑分析仿真,結果表明該方法所規劃的路徑可視范圍大、路徑平緩。綜上所述,該方法能為即將開展的空間星球表面就地探測提供一種初始路徑規劃方法,是對現有巡視器巡視分析方法不足的彌補,能為火星和其它小行星表面巡視路徑規劃提供一種新思路。
)
[1]PEckart,BishopsALdrin.Thelunarbasehandbook[M].NewYork:McGraw-HillHigherEducation,1999
[2]史美萍. 基于人機協同的月球車路徑規劃技術研究[D]. 長沙:國防科學技術大學,2006
ShiMeiping.ResearchonpathplanningtechnologyforLunarroverbasedonthehuman-machinecooperation[D].Changsha:NationalUniversityofDefenseTechnology,2006 (inChinese)
[3]MWang,HTamimi,AZell.Robotnavigationusingbiosonarfornaturallandmarktracking[C]//Proc.IEEEInt’lSymposiumonComputationalIntelligenceinRoboticsandAutomation.NewYork:IEEE,2005:3-7
[4]BMuirhead.Marsrover,pastandfuture[C]//Proc.IEEEAerospaceConference.NewYork:IEEE,2004:128-134
[5]LMatthies.Stereovisionforplanetaryrovers:stochasticmodelingtonearreal-timeimplementation[J].Int’lJ.ComputerVision,1992,8(1):71-91
[6]FranklinWR,RayCK.Tradeoffswhenmultipleobserversitingonlargeterraincells[C]//Proceedingsof12thInternationalSymposiumonSpatialDataHanding.Vienna:UniversityofVienna,2006:845-861
[7]KimY,RanaS,WiseS.Exploringmultipleviewshedanalysisusingterrainfeaturesandoptimizationtechniques[J].Computers&Geosciences,2004,30:1019-1032
[8]李立春,許穎慧,孟彥鵬,等.月面探測中的單目相機成像測量方法[J]. 航天器返回與遙感,2015,36(5):36-43
LiLichun,XuYinghui,MengYanpeng,etal.Measurementmethodbasedonimageofmono-viewinlunarexploration[J].SpacecraftRecovery&RemoteSensing,2015,36(5):36-43 (inChinese)
[9]BenediktML,DavisLS.Computationalmodelsofspace:IsovistsandIsovistfields[J].ComputerGraphicsandImageProcessing,1979,11:49-72
[10]FlorianiLD,MagilloP.Visibilitycomputationsonhierachicaltriangulatedterrainmodels[J].GeoInformatica,1997,1(3):219-250
[11]程剛,楊杰,柴洪友,等.一種新型復合構型月球車的越障特性分析[J]:航天器工程.2007.16(6):39-45
ChengGang,YangJie,ChaiHongyou,etal.Analysisofover-obstaclecharacteristicofanewcomplexstructurelunarrover[J].SpacecraftEngineering,2007,16(6):39-45 (inChinese)
[12]CohenorD,SharkedA.Visibilityanddead-zonesindigitalterrainmaps[J].ComputerGraphicsForum,14(3):243-253
[13]歐陽自遠. 月球科學概論[M]. 北京:中國宇航出版社,2005
OuyangZiyuan.Introductiontolunarscience[M].Beijing:ChinaAstronauticPress,2005 (inChinese)
[14]歐陽自遠. 我國月球探測的總體科學目標與發展戰略[J]. 地球科學進展,2004,19(3):351-358
OuyangZiyuan.ScientificobjectivesofChineselunarexplorationprojectanddevelopmentstrategy[J].AdvanceinEarthScience,2004,19(3):351-358 (inChinese)
[15]劉紅英,夏勇,周水生. 數學規劃基礎[M]. 北京:北京航空航天大學出版社,2012
LiuHongying,XiaYong,ZhouShuisheng.Mathematicalprogramming[M].Beijing:BeihangUniversityPress,2012 (inChinese)
[16]徐偉,李文根,張毅超,等.路網中位置不確定的二元反kNN查詢[J]. 計算機應用,2017,7(2):341-346
XuWei,LiWengen,ZhangYichao,etal.Probabilisticbichromaticreverse-kNNqueryonrouadnetwork[J].JournalofComputerApplications,2017,37(2):341-346 (inChinese)
[17]KornF,MuthukrishnanS.Influencesetsbasedonreversenearestneighborqueries[J].AcmSigmodRecord,2000,29(2):201-212
(編輯:張小琳)
Aster Surface Patrol Path Analysis Based on Space-visibility
SU Qinghua1,2LI Juntao1,2SUI Xiaohong3YUAN Chunzhu2
(1 School of Information,Beijing Wuzi University,Beijing 101191, China) (2 Beijing Key Laboratory for Intelligent Logistics, Beijing 101191, China) (3 DFH Satellite Co.,Ltd.,Beijing 100094,China)
In view of the low efficiency and low rate of safe patrol inspection in the landing area of the patrol rover, the real-time landing area DEM terrain data obtained by the lander camera in hover is used in this paper to propose a new patrol route analysis method, according to the rover structure, obstacle climbing capability, space-visibility and scientific exploration value. The simu-lation results show that the method can provide a reliable and efficient initial patrol path when the lunar rover structure and obstacle climbing capability are known, which can provide reference for planetary patrol program.
space-visibility; obstacle climbing capability; DEM data of landing area; initial patrol path
max{slope(pi,pi+1),slope(pi,pi+2),…,
min[f(L)]=1/RaL

min{dist(pi,pi+d)}i=1,2,3,…,(k-d)
2017-04-26;
2017-05-16
蘇慶華,女,博士,講師,研究方向為圖像處理、機器人導航、著陸器著陸及巡視視覺導航。Email:qinghuasu@126.com。
V476.3
A
10.3969/j.issn.1673-8748.2017.03.003
猜你喜歡
今日農業(2021年9期)2021-11-26 07:41:24
發明與創新·小學生(2021年3期)2021-03-25 11:48:49
公民與法治(2020年11期)2020-07-25 02:02:06
領導決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
中國衛生(2016年2期)2016-11-12 13:22:16
華東科技(2016年10期)2016-11-11 06:17:41
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
中國工程咨詢(2016年4期)2016-02-14 07:28:28