基于最小二乘支持向量機(jī)的無人機(jī)遙感影像分類
2017-07-15 03:22:08劉偉趙慶展汪傳建陳洪李沛
江蘇農(nóng)業(yè)科學(xué) 2017年9期
劉偉++趙慶展++汪傳建++陳洪++李沛婷

摘要:針對(duì)SVM容易出現(xiàn)過學(xué)習(xí)、泛化能力下降的問題,利用LSSVM在求解線性方程組時(shí)的自身優(yōu)勢(shì),對(duì)高分辨率無人機(jī)多光譜影像進(jìn)行地物分類識(shí)別。采用固定翼無人機(jī)搭載Micro MCA12 Snap多光譜相機(jī),獲取研究區(qū)域瑪納斯河畔的多光譜影像,首先利用最佳波段指數(shù)法與光譜信息、紋理信息結(jié)合得到最佳特征波段組合,從而降低數(shù)據(jù)維度,進(jìn)而利用粒子群優(yōu)化和網(wǎng)格搜索算法分別進(jìn)行參數(shù)尋優(yōu)并交叉驗(yàn)證方法對(duì)影像進(jìn)行SVM和LSSVM對(duì)比試驗(yàn)。結(jié)果表明,Micro MCA12 Snap 多光譜傳感器所選擇的1、6、11波段組合及NDVI、NDWI、Mean特征信息組合,粒子群優(yōu)化LSSVM分類的總體精度較網(wǎng)格搜索LSSVM高0.092%,Kappa系數(shù)高0.006;粒子群優(yōu)化LSSVM分類的總體精度較粒子群優(yōu)化SVM分類高2.021%,Kappa系數(shù)高0.008。試驗(yàn)方法改善了各種地物特別是裸地與沙石的區(qū)分,是對(duì)該相機(jī)及特征組合進(jìn)行分類的有效手段。
關(guān)鍵詞:最小二乘支持向量機(jī);粒子群優(yōu)化;網(wǎng)格搜索;交叉驗(yàn)證;無人機(jī)遙感
中圖分類號(hào): TP751;S127文獻(xiàn)標(biāo)志碼: A
文章編號(hào):1002-1302(2017)09-0187-05
隨著無人機(jī)技術(shù)[1]的成熟,輕量型的多光譜傳感器被廣泛搭載并獲取數(shù)據(jù)[2-3],在國(guó)土資源[4-5]、環(huán)境災(zāi)害[6-7]、農(nóng)情監(jiān)測(cè)[8-12]等眾多領(lǐng)域得到廣泛應(yīng)用。針對(duì)多波段影像數(shù)據(jù)的分類處理[13]也一直是各行業(yè)應(yīng)用所面對(duì)的首要問題,已經(jīng)成為研究熱點(diǎn)之一。
支持向量機(jī)(support vector machine,SVM)是由Vapnik提出的基于統(tǒng)計(jì)學(xué)習(xí)理論和結(jié)構(gòu)風(fēng)險(xiǎn)最小化原理的模式識(shí)別方法[14]。近年來因其具有高維空間超平面分割和局部最優(yōu)解的特征,被廣泛用于多光譜遙感影像的分類。陳波等基于Landsat7 ETM遙感影像構(gòu)建了結(jié)合紋理的SVM分類模型并有效提高了分類精度[15]。張磊等提出一種結(jié)合改進(jìn)的最佳指數(shù)法和SVM進(jìn)行高光譜遙感影像分類新方法,取得比傳統(tǒng)監(jiān)督分類更高的分類精度[13]。但是標(biāo)準(zhǔn)SVM在影像分類時(shí)支持向量的數(shù)量會(huì)隨著訓(xùn)練樣本數(shù)量的增加而線性增加,從而導(dǎo)致分類效率降低,而且標(biāo)準(zhǔn)SVM對(duì)參數(shù)的選擇依賴性大,容易出現(xiàn)過學(xué)習(xí)、泛化能力下降的問題。最小二乘支持向量機(jī)(least square support vector machine,LSSVM)最早由Suykens等提出[16],是標(biāo)準(zhǔn)SVM的一種擴(kuò)展,其優(yōu)化問題的目標(biāo)函數(shù)中利用等式約束條件代替SVM標(biāo)準(zhǔn)算法中的不等式約束條件,降低算法復(fù)雜度,提高收斂速度,使得運(yùn)算時(shí)間較短。高恒振等提出一種基于波段子集最大噪聲分量特征提取的LSSVM的高光譜圖像分類算法并通過試驗(yàn)證明了算法的優(yōu)越性[17]。楊佳佳等提取了遙感圖像中與巖性相關(guān)的紋理、形狀、光譜信息,利用LSSVM在非線性預(yù)測(cè)中的優(yōu)勢(shì),對(duì)研究區(qū)地質(zhì)巖性進(jìn)行識(shí)別且表現(xiàn)良好[18]。
本試驗(yàn)首先結(jié)合最佳波段指數(shù)和光譜、紋理特征來確定地物分類最佳特征組合,然后利用粒子群優(yōu)化[19]及網(wǎng)格搜索尋找最優(yōu)參數(shù)并交叉驗(yàn)證(cross validation,CV)[20],最后建立分類模型,將最佳波段組合作為輸入變量,分別進(jìn)行SVM和LSSVM分類,判斷LSSVM對(duì)分類精度的影響。
1理論基礎(chǔ)與研究思路
1.1支持向量機(jī)分類
SVM分類是一種新的機(jī)器學(xué)習(xí)方法,以結(jié)構(gòu)風(fēng)險(xiǎn)最小化原則為理論基礎(chǔ),適當(dāng)選擇函數(shù)子集及該子集中的判別函數(shù),使學(xué)習(xí)的實(shí)際風(fēng)險(xiǎn)達(dá)到最小。根據(jù)具體的分類過程尋找最優(yōu)分類超平面:線性可分情況下,在原空間尋找2類樣本的最優(yōu)分類超平面;線性不可分的情況下,加入松弛變量進(jìn)行分析,通過使用非線性映射將低維輸入空間的樣本映射到高維屬性空間使其變?yōu)榫€性情況,從而使得在高維屬性空間采用線性算法對(duì)樣本的非線性進(jìn)行分析,并在該特征空間中尋找最優(yōu)分類超平面。同時(shí)由核函數(shù)(kernel function)將線性SVM推廣到非線性的情況,常用核函數(shù)K(xi·x)包括線性核、多項(xiàng)式核、徑向基核和Sigmod核,最終SVM的判別函數(shù)為:
式中:sgn{}為符號(hào)函數(shù);ai為拉格朗日乘子;b為分類的域值;x、y為樣本向量;K(xi·x)為滿足Mercer條件的核函數(shù)。ai不為零的樣本點(diǎn)就稱為支持向量。a*i、b*分別表示ai、b的最優(yōu)解。
1.2最小二乘支持向量機(jī)分類
雖然SVM用于圖像分類有很多優(yōu)點(diǎn),但其求解是一個(gè)解凸二次規(guī)劃問題的過程,計(jì)算過程比較復(fù)雜,當(dāng)樣本點(diǎn)較多時(shí),時(shí)間復(fù)雜度也較高。LSSVM在其優(yōu)化問題的目標(biāo)函數(shù)中利用等式約束條件代替標(biāo)準(zhǔn)SVM中的不等式約束條件,最終通過求解一組線性方程得到最優(yōu)解,大大降低計(jì)算復(fù)雜度,并且提高運(yùn)算速度。求解最優(yōu)超平面問題等價(jià)于求解如下方程:
式中:ω為權(quán)向量;b為待確定的參數(shù);T表示矩陣的轉(zhuǎn)置,在此表示為矩陣ω的轉(zhuǎn)置;φ(xi)表示的是將xi從低維空間非線性映射到高維空間;γ為模型泛化能力和精度的一個(gè)折中參數(shù)且γ>0;ξ為松弛變量且ξ≥0。引入拉格朗日函數(shù)并推導(dǎo)可得到LSSVM的判別函數(shù):
式中:拉格朗日乘子ai為支持向量,而K(xi·x)是滿足 Mercer 條件的核函數(shù)。
1.3研究思路
高空間分辨率及光譜分辨率的遙感數(shù)據(jù)在分類時(shí)會(huì)面臨大量的冗余數(shù)據(jù),從而增加數(shù)據(jù)處理的計(jì)算復(fù)雜度及時(shí)間復(fù)雜度,因此在進(jìn)行特征變量輸入之前一般須對(duì)影像進(jìn)行特征信息選擇來降低信息維度。特征信息的選擇應(yīng)滿足3個(gè)基本條件:波段信息量最大、波段間相關(guān)性最小、地物對(duì)所選擇的波段信息具有較大的光譜差異。本試驗(yàn)以原始波段信息為主,結(jié)合光譜信息、紋理信息[21]對(duì)研究區(qū)域進(jìn)行SVM及 LSSVM 對(duì)比分類。
根據(jù)原始波段信息的選擇,本試驗(yàn)使用的是最佳波段指數(shù)法(optimum index factor,OIF),它是基于波段信息量標(biāo)準(zhǔn)差及波段間相關(guān)性且能反映出波段組合信息質(zhì)量的方法。同時(shí)選擇計(jì)算研究區(qū)對(duì)植被及水體敏感的相關(guān)指數(shù)作為光譜信息輸入變量。提取紋理信息的方法很多,目前主要有基于統(tǒng)計(jì)方法、基于小波變換方法和基于地統(tǒng)計(jì)學(xué)等方法。試驗(yàn)先采用協(xié)方差矩陣作為變換矩陣進(jìn)行主成分變換(principal component analysis,PCA)獲得第一主成分后再得到影像的灰度共生矩陣(gray level co-occurrence matrix,GLCM)的相關(guān)主要參量并選擇信息量最大的特征值作為紋理信息輸入變量。
針對(duì)SVM和LSSVM,本試驗(yàn)在Matlab R2014a環(huán)境下分別以臺(tái)灣大學(xué)林智仁教授設(shè)計(jì)的開源庫(kù)LibSVM及LSSVM Toolbox為基礎(chǔ)進(jìn)行算法開發(fā)與驗(yàn)證,過程中利用群體智能優(yōu)化的粒子群優(yōu)化算法和網(wǎng)格搜索進(jìn)行參數(shù)尋優(yōu)并交叉驗(yàn)證模型參數(shù),達(dá)到對(duì)地物進(jìn)行準(zhǔn)確劃分的目的(圖1)。
2研究區(qū)域及數(shù)據(jù)預(yù)處理
2.1研究區(qū)域及數(shù)據(jù)
研究區(qū)位于新疆沙灣縣瑪納斯河畔,范圍為86°7′58″~ 86°8′26″E,44°13′38″~ 44°14′6″N。區(qū)域內(nèi)主要包含植被、水體、建筑物、裸地、沙石、陰影等地物類型。本試驗(yàn)使用的高分辨率遙感影像數(shù)據(jù)來自于搭載在遠(yuǎn)征-6型油動(dòng)固定翼無人機(jī)上的多光譜相機(jī)Micro MCA12 Snap,該相機(jī)可同時(shí)獲取12個(gè)波段(470、515、550、610、656、710、760、800、830、860、900、950 nm)的數(shù)據(jù)。其中1~5個(gè)波段位于可見光區(qū)域,波段6、7位于植被反射波譜曲線的紅邊區(qū)域,8~12波段位于近紅外區(qū)域。波段8、5、3、1分別近似TM影像的4、3、2、1波段,可進(jìn)行相關(guān)指數(shù)的計(jì)算。數(shù)據(jù)采集時(shí)間為2015年8月22日,相對(duì)航高500 m,巡航速度為130 km/h,地面采樣距離GSD為22.6 cm/pixel。
2.2數(shù)據(jù)預(yù)處理
無人機(jī)影像原始數(shù)據(jù)使用Pix4D Mapper進(jìn)行影像拼接。坐標(biāo)系統(tǒng)采用WGS84,投影方式為UTM,經(jīng)ENVI進(jìn)行幾何校正進(jìn)行后續(xù)試驗(yàn)。
最佳波段指數(shù)選擇的目的是選取像元灰度標(biāo)準(zhǔn)差高且波段間相關(guān)系數(shù)低的波段組合。計(jì)算公式為:
式中:Si為第i波段灰度值標(biāo)準(zhǔn)差;Rij為第i和第j波段間相關(guān)性系數(shù)。本試驗(yàn)選擇3個(gè)波段組合并計(jì)算OIF值,通過 C++ 編程共產(chǎn)生220個(gè)波段組合,OIF值排序前10的波段組合見表1,故選擇1、6、11波段作為原始波段組合。
光譜特征信息和紋理特征信息主要是通過統(tǒng)計(jì)方法進(jìn)行選擇。本試驗(yàn)計(jì)算了對(duì)植被及水體敏感的幾種光譜指數(shù):歸一化植被指數(shù)(NDVI)、紅邊歸一化植被指數(shù)(NDVI710)、比值植被指數(shù)(RVI)以及歸一化差分水體指數(shù)(NDWI)、水波段[CM(25]指數(shù)(WBI),具體標(biāo)準(zhǔn)差計(jì)算結(jié)果依次為0.387、0.233、 0037、0.348、0.006。針對(duì)紋理特征信息,通過主成分變換和生成灰度共生矩陣方法得到主要參量:均值、方差、同源性、對(duì)比度、相異度、熵、二階距和相關(guān)性,具體標(biāo)準(zhǔn)差統(tǒng)計(jì)結(jié)果依次為8.689、3.014、0.227、4.945、0.893、0.554、0.224、0.410。根據(jù)統(tǒng)計(jì)結(jié)果,選擇NDVI、NDWI為光譜特征信息以及均值(Mean)參量為紋理特征信息。
綜合以上對(duì)原始波段信息、光譜特征信息及紋理特征信息的選擇,得到以波段1、6、11及特征信息NDVI、NDWI、Mean組成的最佳分類組合。圖2為1、6、11(470、710、900 nm)波段的研究區(qū)域假彩色合成圖。
3試驗(yàn)及結(jié)果分析
為獲得較好的分類器,SVM與LSSVM均須要對(duì)樣本及模型參數(shù)進(jìn)行一定的選擇。對(duì)于樣本的選擇,主要是選擇合適分布和數(shù)量的樣本點(diǎn)以進(jìn)行模型訓(xùn)練及測(cè)試。試驗(yàn)采用徑向基核函數(shù)(radial basis function,RBF)作為分類核函數(shù)。對(duì)于模型參數(shù)的選擇,SVM分類時(shí)須要確定的參數(shù)有懲罰系數(shù)C和核函數(shù)參數(shù)g,而LSSVM須要確定的參數(shù)有正則化參數(shù)γ和核函數(shù)寬度δ2。采用粒子群優(yōu)化算法和網(wǎng)格搜索方式對(duì)訓(xùn)練樣本進(jìn)行參數(shù)選擇,并以多折交叉驗(yàn)證誤差評(píng)價(jià)參數(shù)的優(yōu)劣。
3.1樣本選取及分類模型的建立
為保證樣本的選取具有代表性,在完整研究區(qū)域內(nèi)隨機(jī)均[CM(25]勻采集6種地物類型(水體、沙石、裸地、植被、陰影、建筑物)的樣本點(diǎn),樣本的可分性可用J-M(jeffries-matusita)距離及轉(zhuǎn)換分離度(transformed divergence)作為評(píng)價(jià)標(biāo)準(zhǔn)。這2個(gè)度量值在0~2.0之間,大于1.9說明樣本之間可分離性好,屬于合格樣本;小于1.8,須要重新選擇樣本;小于1.0,考慮將2類樣本合成1類樣本。對(duì)比發(fā)現(xiàn),加入光譜、紋理特征信息之后J-M距離及轉(zhuǎn)換分離度都達(dá)到了較高的水平,明顯增加了樣本的可分離性(表2)。圖3為樣本的N維空間可視化顯示圖,可以看出選擇的6類樣本可以很好地分離。
粒子群優(yōu)化算法是基于群體智能的新型優(yōu)化算法,該算法在對(duì)鳥群行為觀察的基礎(chǔ)上,利用個(gè)體信息的共享使得整個(gè)群體在問題求解空間中產(chǎn)生從無序到有序的變化過程,最終得到最優(yōu)解。優(yōu)化參數(shù)設(shè)置為c1=2,c2=2,最大進(jìn)化數(shù)為200。K-CV方法中,6個(gè)波段的樣本特征子集被隨機(jī)分成k個(gè)[CM(25]子集,K-CV在每個(gè)子集上進(jìn)行k次驗(yàn)證,每次取1個(gè)子集作為測(cè)試集,其余k-1個(gè)子集作為訓(xùn)練集,最后將分類準(zhǔn)確率的平均值作為樣本的分類結(jié)果(本試驗(yàn)k取值為10)。
3.2分類結(jié)果及分析
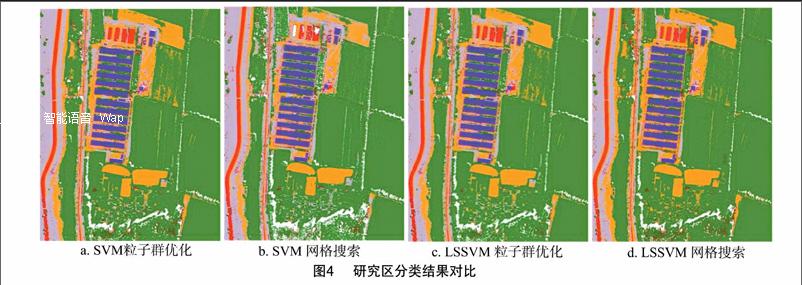
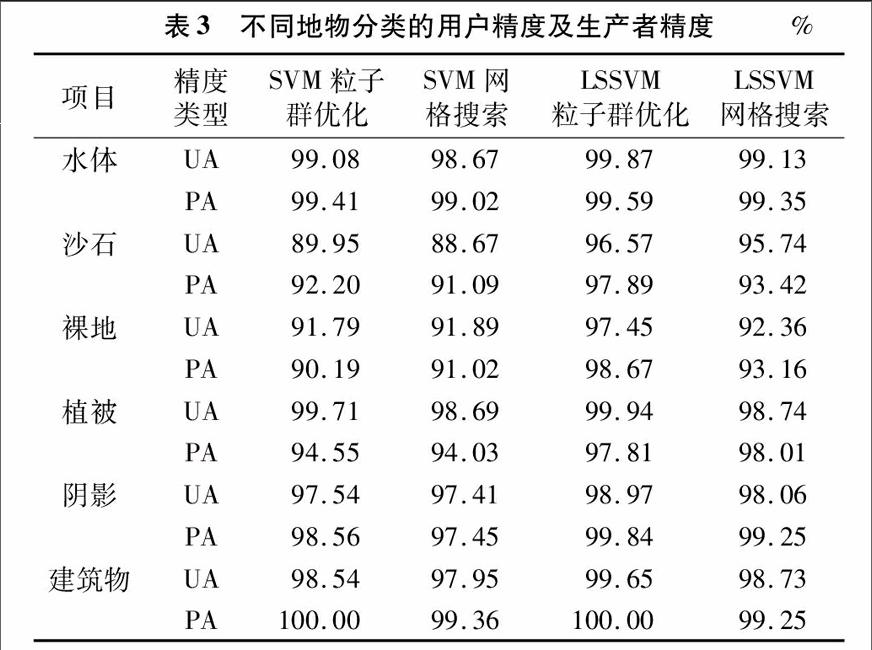
研究區(qū)域的不同分類結(jié)果如圖4 所示,其中a、b分別為粒子群優(yōu)化SVM分類和網(wǎng)格搜索SVM分類,c、d分別為粒子群優(yōu)化LSSVM分類和網(wǎng)格搜索LSSVM分類。表3給出試驗(yàn)樣本集各個(gè)類別的用戶精度(user accuracy,UA)和生產(chǎn)者精度(producer accuracy,PA)。各分類方法的訓(xùn)練時(shí)間、測(cè)試時(shí)間、總體精度、Kappa系數(shù)如表4所示。
針對(duì)不同分類方法,結(jié)合表3、表4和圖4可知沙石和裸地的生產(chǎn)者精度和用戶精度相對(duì)較低,但對(duì)于粒子群優(yōu)化過程,沙石的UA從SVM分類的89.95%上升到LSSVM分類的96.57%,PA從SVM分類的92.20%上升到LSSVM分類的97.89%,裸地表現(xiàn)出了同樣的趨勢(shì)。粒子群優(yōu)化算法中,SVM、LSSVM的MSE分別為0.008 6、0.007 8,總體精度由SVM的97.833%提高到LSSVM的99.854%,Kappa系數(shù)由SVM的0.974提高到LSSVM的0.982;網(wǎng)格搜索過程中,SVM、LSSVM的MSE分別為0.024 6、0.012 4,總體精度由SVM的96.574%提高到LSSVM的99.762%,Kappa系數(shù)由SVM的0.969提高到LSSVM的0.976。
針對(duì)不同參數(shù)尋優(yōu)方法,對(duì)比SVM及LSSVM的2種分類結(jié)果,其中,除了裸地的SVM粒子群優(yōu)化后用戶精度、生產(chǎn)者精度稍低于SVM網(wǎng)格搜索后的用戶精度、生產(chǎn)者精度,植被的LSSVM粒子群優(yōu)化后生產(chǎn)者精度稍低于LSSVM網(wǎng)格搜索后的生產(chǎn)者精度之外,其他地物的粒子群優(yōu)化結(jié)果均高于網(wǎng)格搜索生產(chǎn)者精度和用戶精度,甚至達(dá)到了100%。SVM分類時(shí),網(wǎng)格搜索和粒子群優(yōu)化的MSE分別為0.024 6、0.008 6,且粒子群優(yōu)化下的訓(xùn)練時(shí)間、測(cè)試時(shí)間均縮短,總體精度由網(wǎng)格搜索的96.574%提高到粒子群優(yōu)化的97.833%,Kappa系數(shù)由網(wǎng)格搜索的0.969提高到粒子群優(yōu)化的0.974;LSSVM分類時(shí),網(wǎng)格搜索和粒子群優(yōu)化的MSE分別為 0.012 4、0.007 8,同樣粒子群優(yōu)化的訓(xùn)練時(shí)間、測(cè)試時(shí)間也較網(wǎng)格搜索短,總體精度由網(wǎng)格搜索的99.762%提高到粒子群優(yōu)化的99.854%,Kappa系數(shù)由網(wǎng)格搜索的0.976提高到粒子群優(yōu)化的0.982。
4結(jié)論
本試驗(yàn)利用無人機(jī)搭載Micro MCA12 Snap多光譜相機(jī)獲得地面高分辨率多光譜影像,將最佳波段指數(shù)法與光譜信息、紋理信息結(jié)合得到最佳波段組合以降低數(shù)據(jù)維度,然后分別利用粒子群優(yōu)化算法和網(wǎng)格搜索對(duì)最佳波段組合進(jìn)行SVM和LSSVM分類并以交叉驗(yàn)證作為參數(shù)評(píng)價(jià)標(biāo)準(zhǔn)。試驗(yàn)結(jié)果顯示,網(wǎng)格搜索最優(yōu)參數(shù)時(shí),LSSVM分類較SVM分類總體精度高3.188%,Kappa系數(shù)高0.007;粒子群優(yōu)化算法參數(shù)尋優(yōu)時(shí),LSSVM分類較SVM分類總體精度高2.021%,Kappa系數(shù)高0.008;粒子群優(yōu)化LSSVM分類較網(wǎng)格搜索LSSVM分類總體精度高0.092%,Kappa系數(shù)高0.006。試驗(yàn)結(jié)果表明,LSSVM對(duì)Micro MCA12 Snap多光譜影像的各分類精度均有提高,是有效的分類手段,具有一定的應(yīng)用價(jià)值。
參考文獻(xiàn):
[1]楊進(jìn)生,郭穎平,蓋利亞,等. 無人直升機(jī)遙感在華北平原地裂縫監(jiān)測(cè)中的應(yīng)用[J]. 遙感信息,2015,30(1):66-70.
[2]汪沛,羅錫文,周志艷,等. 基于微小型無人機(jī)的遙感信息獲取關(guān)鍵技術(shù)綜述[J]. 農(nóng)業(yè)工程學(xué)報(bào),2014,30(18):1-12.
[3]田振坤,傅鶯鶯,劉素紅,等. 基于無人機(jī)低空遙感的農(nóng)作物快速分類方法[J]. 農(nóng)業(yè)工程學(xué)報(bào),2013,29(7):109-116,295.
[4]張園,陶萍,梁世祥,等. 無人機(jī)遙感在森林資源調(diào)查中的應(yīng)用[J]. 西南林業(yè)大學(xué)學(xué)報(bào),2011,31(3):49-53.
[5]王利民,劉佳,楊玲波,等. 基于無人機(jī)影像的農(nóng)情遙感監(jiān)測(cè)應(yīng)用[J]. 農(nóng)業(yè)工程學(xué)報(bào),2013,29(18):136-145.
[6]韓文權(quán),任幼蓉,趙少華. 無人機(jī)遙感在應(yīng)對(duì)地質(zhì)災(zāi)害中的主要應(yīng)用[J]. 地理空間信息,2011,9(5):6-8,163.
[7]雷添杰,李長(zhǎng)春,何孝瑩. 無人機(jī)航空遙感系統(tǒng)在災(zāi)害應(yīng)急救援中的應(yīng)用[J]. 自然災(zāi)害學(xué)報(bào),2011,20(1):178-183.
[8]馮家莉,劉凱,朱遠(yuǎn)輝,等. 無人機(jī)遙感在紅樹林資源調(diào)查中的應(yīng)用[J]. 熱帶地理,2015,35(1):35-42.
[9]李冰,劉镕源,劉素紅,等. 基于低空無人機(jī)遙感的冬小麥覆蓋度變化監(jiān)測(cè)[J]. 農(nóng)業(yè)工程學(xué)報(bào),2012,28(13):160-165.
[10]Herwitz S R,Johnson L F,Dunagan S E,et al. Imaging from an unmanned aerial vehicle:agricultural surveillance and decision support[J]. Computers and Electronics in Agriculture,2004,44(1):49-61.
[11]Rango A,Laliberte A,Herrick J E,et al. Unmanned aerial vehicle-based remote sensing for rangeland assessment,monitoring,and management[J]. Chinese Hydraulics & Pneumatics,2009,3(1):11-15.
[12]Laliberte A S,Goforth M A,Steele C M,et al. Multispectral remote sensing from unmanned aircraft:image processing workflows and applications for rangeland environments[J]. Remote Sensing,2011,3(11):2529-2551.
[13]張磊,邵振峰. 改進(jìn)的OIF和SVM結(jié)合的高光譜遙感影像分類[J]. 測(cè)繪科學(xué),2014,39(11):114-117,66.
[14]Vapnik V N. The nature of statistical learning theory[M]. New York:Springer-Verlag,1995.
[15]陳波,張友靜,陳亮. 結(jié)合紋理的SVM遙感影像分類研究[J]. 測(cè)繪工程,2007,16(5):23-27.
[16]Suykens J A K,Vandewalle J. Least squaressupport vector machine classfiers[J]. Neural Processing Letter,1999,9:293-300.
[17]高恒振,萬建偉,朱珍珍,等. 基于波段子集特征提取的最小二乘支持向量機(jī)高光譜圖像分類技術(shù)[J]. 光譜學(xué)與光譜分析,2011,31(5):1314-1317.
[18]楊佳佳,姜琦剛,陳永良,等. 基于最小二乘支持向量機(jī)和高分辨率遙感影像的大尺度區(qū)域巖性劃分[J]. 中國(guó)石油大學(xué)學(xué)報(bào)(自然科學(xué)版),2012,36(1):60-67.
[19]丁勝,袁修孝,陳黎. 粒子群優(yōu)化算法用于高光譜遙感影像分類的自動(dòng)波段選擇[J]. 測(cè)繪學(xué)報(bào),2010,39(3):257-263.
[20]任哲,陳懷亮,王連喜,等. 利用交叉驗(yàn)證的小麥LAI反演模型研究[J]. 國(guó)土資源遙感,2015,27(4):34-40.
[21]趙慶展,劉偉,尹小君,等. 基于無人機(jī)多光譜影像特征的最佳波段組合研究[J]. 農(nóng)業(yè)機(jī)械學(xué)報(bào),2016,47(3):242-248,291.