單足機器人垂直跳躍落地碰撞沖擊力分析
2017-07-10 10:26:57李哲,高君
哈爾濱工業大學學報 2017年7期
李 哲, 高 君
(哈爾濱工業大學(威海) 船舶與海洋工程學院, 山東 威海 264209)
單足機器人垂直跳躍落地碰撞沖擊力分析
李 哲, 高 君
(哈爾濱工業大學(威海) 船舶與海洋工程學院, 山東 威海 264209)
為研究落地碰撞沖擊力的變化規律,針對垂直跳躍單足機器人球面尼龍足底與橡膠地面的碰撞過程,建立由支撐腿和機身的動力學模型、橡膠地面大變形黏彈性力學模型和氣缸上下腔氣體熱力學模型組成的整體數學模型和仿真模型. 仿真結果表明:壓縮階段遞增的彈性力和先增后減的阻尼力使地面沖擊反力先增大后減小,恢復階段快速減小的彈性力和反向阻尼力共同作用導致沖擊反力單調減小;最大沖擊力隨下落高度、橡膠貯能模量的增大和橡膠墊厚度的減小單調增大,隨橡膠耗能因子與頻率比值的增大先減小后增大;單足機器人0.1 m垂直跳躍落地碰撞的實驗結果表明,實驗數據與仿真結果的相對誤差<7.6%,驗證了所采用理論分析方法和仿真結果的正確性.
單足機器人;垂直跳躍;落地碰撞;橡膠模型;沖擊分析
動態穩定性是研究跳躍機器人的關鍵問題之一,落地沖擊對單足機器人跳躍運動的動態穩定性影響最大,國內外學者近年所推出的多款單足機器人樣機如Raibert機器人[1]、弓形腿機器人[2]、ARL-Monopod[3-4]和仿袋鼠機器人[5-6]均采用忽略彈跳腿質量的SLIP模型來回避碰撞沖擊力的影響. 對于本文所設計的彈跳腿質量達到機器人總質量三分之一的全氣動單足機器人[7],必須掌握機器人落地碰撞沖擊力的產生機理和變化規律,為研究機器人動態穩定性奠定基礎. 目前,廣泛采用的動量沖量法[8]不考慮碰撞的中間過程且速度恢復系數難以準確估算[9];有限元法[10]由于自由度過多導致計算效率低,并且在處理大范圍運動與小范圍振動耦合的問題時,容易產生數值病態解問題;連續接觸力法[11]中基于Hertz接觸理論及恢復系數的非線性彈簧阻尼模型,必須滿足碰撞體局部小變形的前提條件[12].
本文所設計的單足機器人采用橡膠地面進行碰撞過程的緩沖,在機器人剛性足底和橡膠壓縮大變形的條件下,通過建立橡膠非線性彈簧阻尼模型,采用連續接觸力法構建單足機器人落地碰撞模型,運用理論分析、動態建模、數值仿真和實驗驗證相結合的研究方法,研究碰撞沖擊力的變化規律及相關因素的影響規律.
1 單足機器人落地碰撞過程分析
單足機器人垂直跳躍落地碰撞過程見圖1. 圖1(a)所示機器人位于最高點位置,控制氣缸上下腔氣壓相等和活塞相對缸體在確定位置,令單足機器人沿垂直滑道自由下落. 圖1(b)為機器人落地碰撞過程原理、受力分析及坐標系示意圖,相對坐標系OtjZtj原點在地面坐標系OZ中的坐標為H-ztj,角標t、j和tj分別表示支撐腿、機身和支撐腿相對機身的量. 機器人落地后,支撐腿在橡膠地面沖擊反力Fc、重力mtg、活塞與缸筒摩擦力Fm、兩腔氣壓差推力(p1-p2)A1的共同作用下,速度由初值快速減小為零并發生反彈,反彈階段由于兩腔氣壓差的更大推力,支撐腿離開地面很小的距離又再次下降,與地面形成二次碰撞. 機身在足底觸地時刻上下腔氣壓差推力為零,保持自由落體運動狀態不參與碰撞,碰撞期間在兩腔氣壓差推力、重力mjg和摩擦力作用下加速度略有降低.
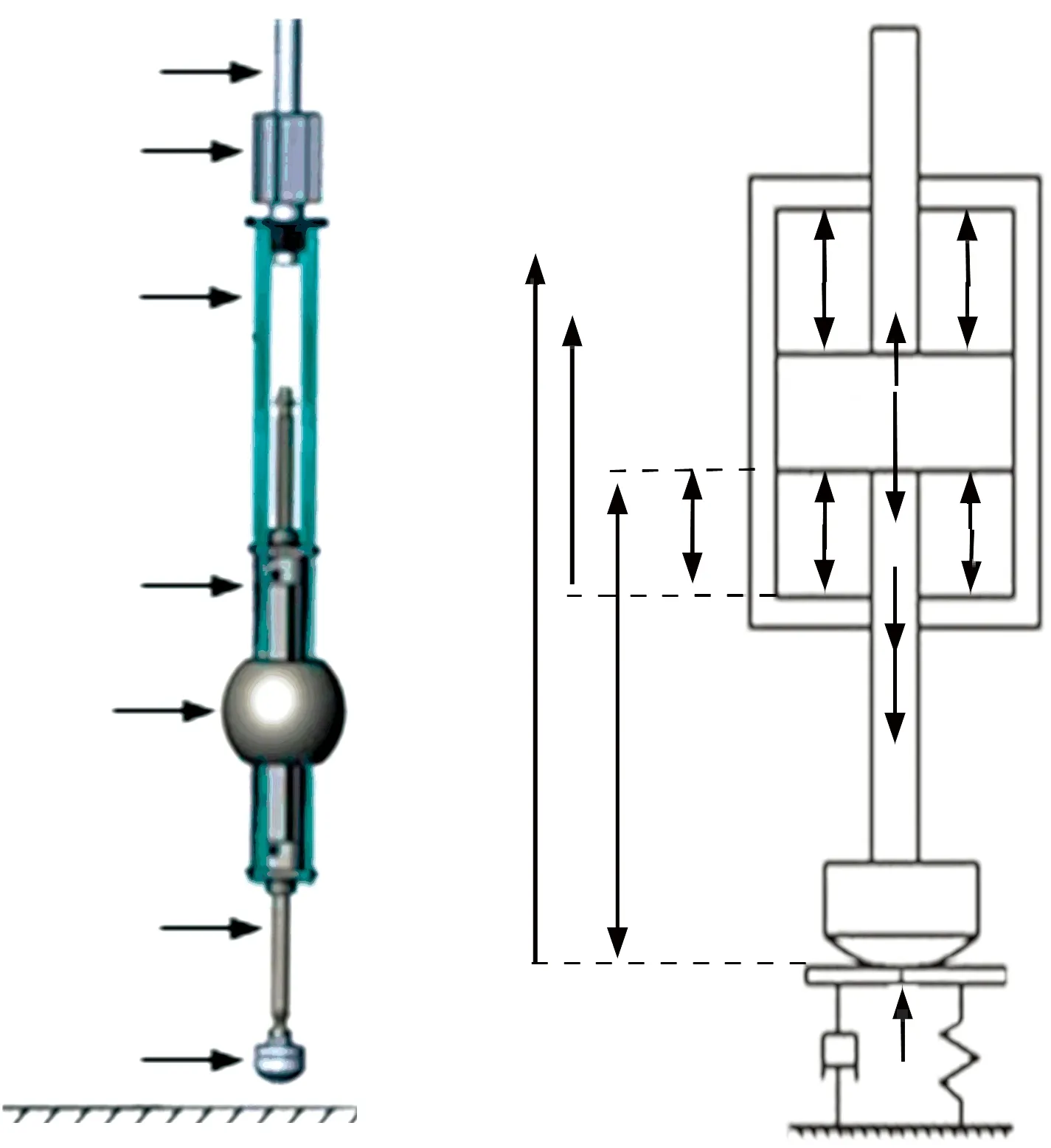
(a) 結構 (b) 碰撞原理
2 落地碰撞數學模型的建立
由于高彈性橡膠地面的緩沖作用延長了碰撞時間,橡膠地面的沖擊反力可以通過其較大的變形計算,擬通過建立支撐腿和機身的運動方程、兩腔氣體能量方程、橡膠變形力計算方程構建機器人落地碰撞數學模型[13].
2.1 支撐腿和機身運動方程
根據圖1(b)機器人落地碰撞過程受力分析,可得支撐腿和機身動力學方程為

式中:zt為支撐腿質心絕對坐標,A1為活塞受壓面積,zj為機身質心絕對坐標.
摩擦力在氣缸運動過程中變化非常復雜,在有潤滑的條件下,一般將其視為由定值靜摩擦力和動摩擦力及與活塞速度成正比的黏性摩擦力組成. 考慮到支撐腿相對機身一直處于運動之中,且碰撞時間較短,故不考慮靜摩擦力,摩擦力計算公式為
Fm=FK·sign(v)+B1v,
式中:B1為黏性系數,FK為庫倫摩擦力,v為活塞相對缸筒速度.
2.2 氣缸兩腔氣體能量方程
由于氣缸兩腔氣體壓力較低,碰撞時間極短,假設碰撞期間氣體的熱力過程為理想氣體的絕熱過程,根據熱力學第一定律及絕熱過程狀態參數的關系,可得上下腔封閉容腔能量方程為


式中:p、V、s、ztj、k分別為腔內氣體絕對壓力、體積、氣缸行程、支撐腿相對機身坐標、比熱比,p、V的第1個角標為“1”或“2”分別表示氣缸上、下腔參數,p、V的第2個角標和ztj的第1個角標為“1”表示機器人落地時刻初始參數.
2.3 橡膠力學模型
橡膠墊可以視為彈性地基模型[14],忽略剪切應力,考慮到橡膠的黏彈特性,建立橡膠地面的力學模型如圖2所示.
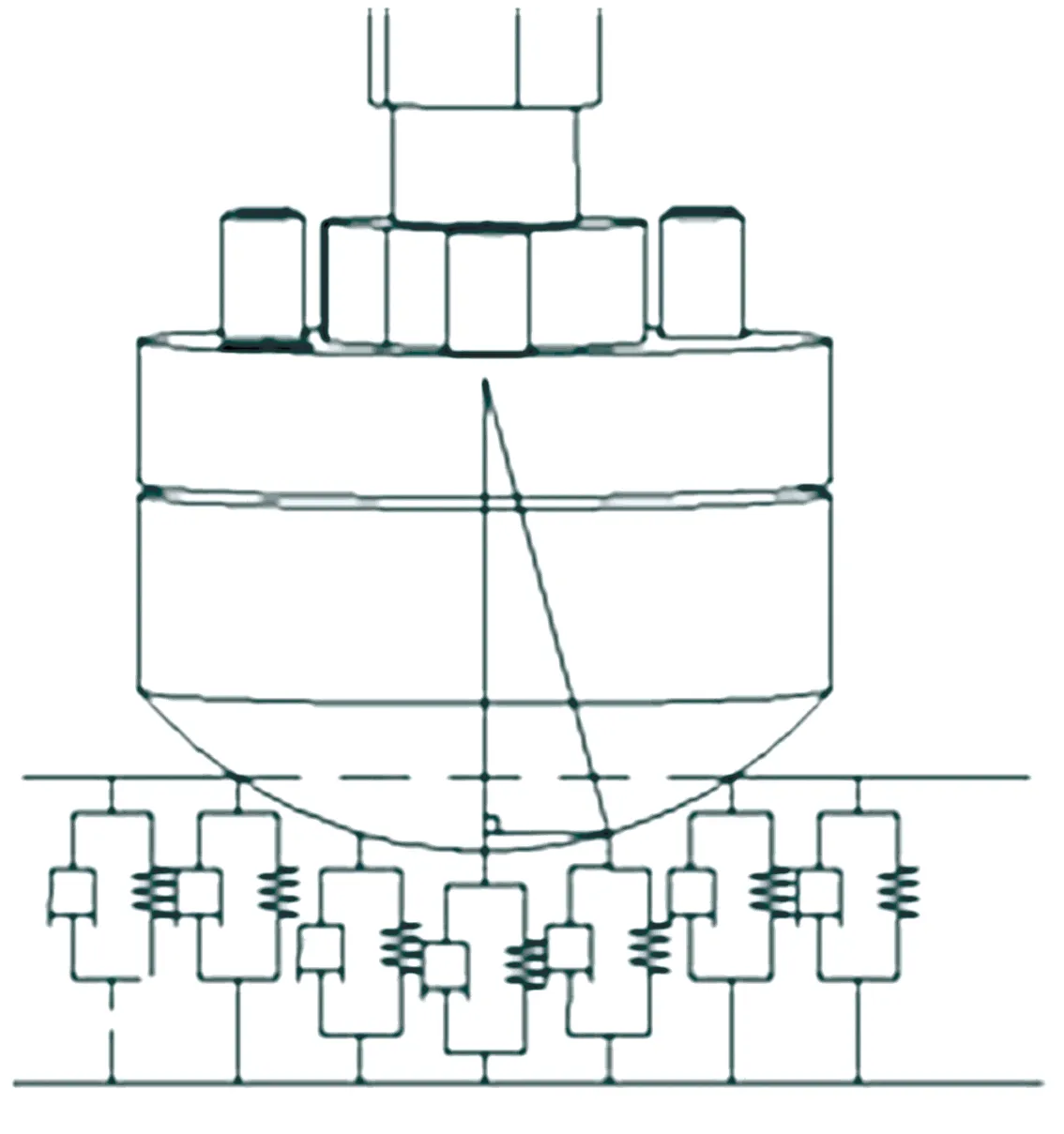
圖2 接觸力學模型
橡膠材料的應力與應變關系如下:
σ=E′ε+Bdε/dt.
式中:E′為橡膠貯能模量,B為橡膠阻尼系數,σ、ε分別為橡膠的應力和應變.
對于橡膠應力應變模型,當應變<10%時,貯能模量通常認為是常數,當應變>10%時,貯能模量呈現非線性變化. 實驗用橡膠墊采用減振性能較強的丁腈橡膠,在碰撞過程中,應變在30%左右. 文獻[15-16]根據熱力學統計原理,在準靜態試驗條件下,橡膠彈性應力與應變的關系為


式中a為實驗測得的橡膠小變形貯能模量.
機器人落地碰撞階段,橡膠處于動態變化過程. 典型橡膠在室溫條件下,頻率每擴大10倍,貯能模量增加10%[17],
式中f為橡膠振動頻率.
tanδ=n·f,
式中:E″為耗能模量,δ為應變滯后應力的相位角,tanδ為耗能因子,與橡膠振動頻率成正比,n為與橡膠材料有關的常數,b=na.
碰撞力為橡膠地面變形微元作用力在變形面積上的積分,橡膠變形呈現與球面足底相同的形狀,在相同的半徑上具有相同的變形量,取環形微元面積為
dA=2πrdr.
式中:r為微圓環的內徑,等于應力作用點到支撐腿軸線的距離.
由圖2可得最大作用半徑rmax為

式中:R為機器人足底球面半徑,hz為機器人足底壓入橡膠地面的深度.
以機器人落地時刻為起點,機器人足底壓入深度為
式中vt為支撐腿絕對速度.
距離支撐腿軸線為r的微圓環應變為
式中h為橡膠墊厚度.
機器人落地受到的碰撞力為微圓環上作用力在整個作用面積上的積分.

3 仿真分析
對單足跳躍機器人垂直落地碰撞過程,在MATLAB/simulink建立仿真模型. 機器人系統和橡膠墊參數分別取表1和表2所示初值.z0為機器人下落高度.

表1 機器人系統參數初值表

表2 橡膠墊參數初值表
3.1 落地碰撞過程仿真分析
當機器人相關初始參數取表1和表2中數據時,單足跳躍機器人落地碰撞過程中,支撐腿動態參數仿真曲線如圖3所示,at為支撐腿絕對加速度.
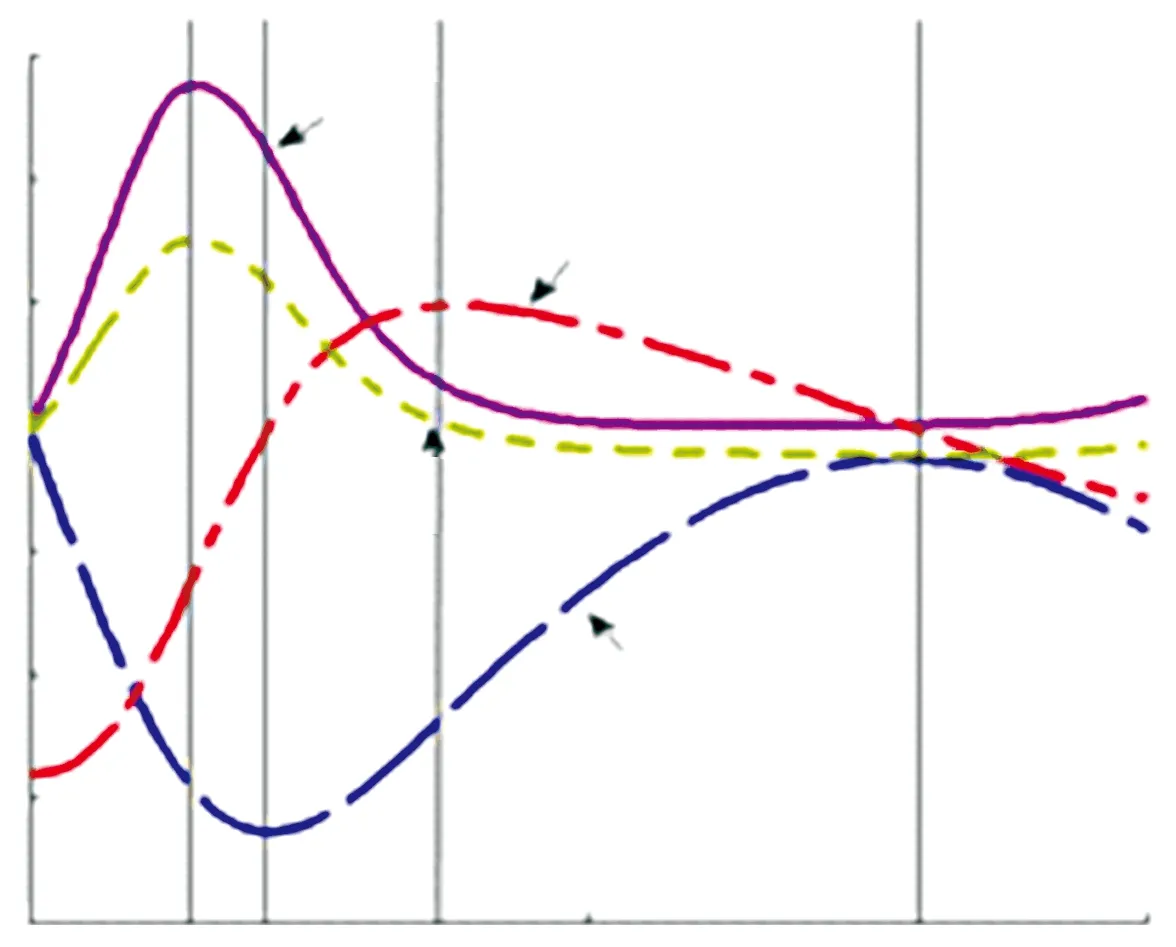
圖3 機器人從0.1 m高度落地碰撞動態參數曲線
機器人落地碰撞過程包括壓縮階段和恢復階段. 在壓縮階段,支撐腿足底表面與橡膠表面始終接觸,支撐腿運動速度等于橡膠變形速度. 隨著機器人足底壓入深度增大,橡膠地面快速增加的彈性力與較大阻尼力合成的沖擊力快速增大,在t1時刻,沖擊力達到最大值1 369.4 N. 隨著支撐腿下降速度的快速減小,阻尼力減小速度開始大于彈性力增加速度,沖擊力開始減小. 至t2時刻,支撐腿速度減小到零,沖擊力為1 094.8 N. 機器人足部壓入橡膠墊深度達到最大值1.63 mm,彈性力達到最大,阻尼力為零,沖擊力完全由彈性力提供. 支撐腿到達最低點后,進入恢復階段并在沖擊反力、重力、兩腔氣壓差推力和摩擦力等阻力的綜合作用下開始向上做加速運動. 隨著支撐腿的反彈,彈性力快速減小,阻尼力反向增大. 在t3時刻,支撐腿反彈速度達到最大值0.49 m/s,橡膠變形1.14 mm. 在t3~t4段,支撐腿反彈速度逐漸減小,在t4時刻,支撐腿反彈至最高點-0.13 mm,碰撞過程結束.
3.2 沖擊力影響因素仿真分析
3.2.1 機器人下落高度對沖擊力的影響
機器人系統取表1和表2所示初值,令機器人下落高度分別為0.05、0.10、0.15和0.20 m,碰撞過程特征時刻仿真數據如表3所示.
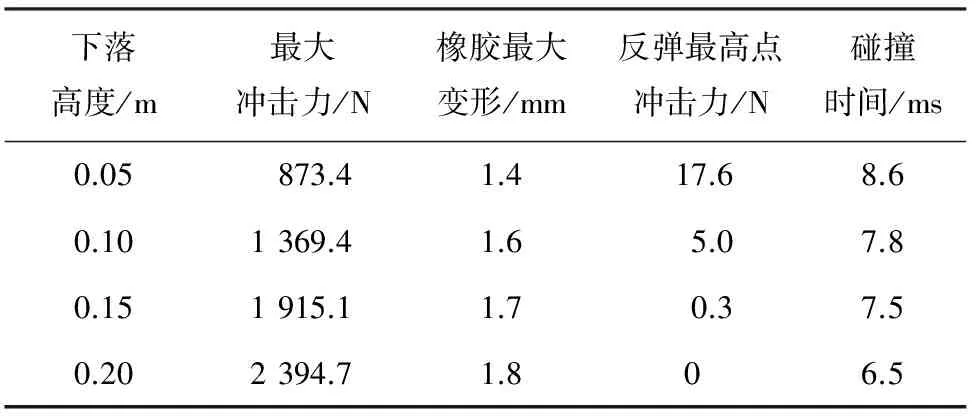
表3 下落高度影響規律仿真數據
下落高度增加使機器人落地速度增加,導致碰撞沖擊力和橡膠最大變形單調增加. 當下落高度由0.05 m增加至0.20 m時,由于沖擊反力相對增加量174%大于橡膠最大變形相對增加量28.6%,導致碰撞時間單調減小. 支撐腿反彈階段,沖擊反力克服重力、上下腔氣壓差推力和阻尼力推動支撐腿向上加速運動;當下降高度<0.15 m時,相對更大的阻力使支撐腿在足底未到達橡膠表面時速度減小到0,反彈最高點沖擊力隨下落高度的增加單調減小; 下落高度為0.20 m時,足夠大的沖擊反力使支撐腿跳離地面,反彈最高點沖擊力為0.
3.2.2 橡膠墊厚度對沖擊力的影響
機器人系統取表1和表2所示初值,令橡膠墊厚度分別為3.0、4.0、4.5、和5.0 mm. 機器人在不同厚度橡膠墊緩沖條件下碰撞過程特征時刻仿真數據如表4所示.
表4 橡膠墊厚度影響規律仿真數據
Tab.4 Simulation data under different the thickness of the rubber mat
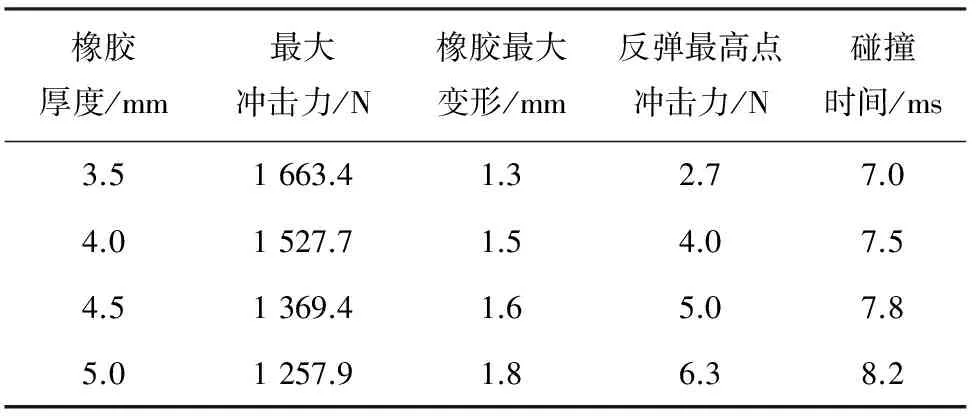
橡膠厚度/mm最大沖擊力/N橡膠最大變形/mm反彈最高點沖擊力/N碰撞時間/ms3.51663.41.32.77.04.01527.71.54.07.54.51369.41.65.07.85.01257.91.86.38.2
橡膠貯能模量隨應變單調增加. 隨著橡膠墊厚度的增加,橡膠墊緩沖能力更強,吸收支撐腿落地時刻相同的動能需要更大的變形,最大沖擊力相應減小. 更小的沖擊力和更大的變形量綜合作用,使反彈最高點沖擊力和碰撞時間均單調增加.
3.2.3 足底球面半徑對沖擊力的影響
機器人系統取表1和表2所示初值,令機器人足底球面半徑取表5第1列數據. 對足底球面半徑不同的機器人進行落地碰撞過程仿真,碰撞過程特征時刻仿真數據如表5所示.
表5 足底球面半徑影響規律仿真數據
Tab.5 Simulation data under the different radius of the surface profile of the foot
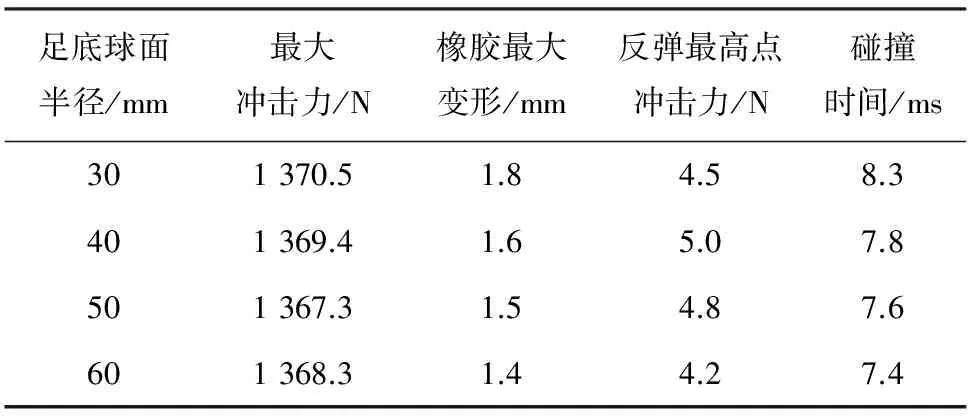
足底球面半徑/mm最大沖擊力/N橡膠最大變形/mm反彈最高點沖擊力/N碰撞時間/ms301370.51.84.58.3401369.41.65.07.8501367.31.54.87.6601368.31.44.27.4
足底球面半徑增大使橡膠變形面積增加,橡膠墊相同應變下產生更大的沖擊力. 隨著足底球面半徑的增加,吸收支撐腿落地時刻相同的動能需要更小的橡膠墊變形、更小的最大應變使最大沖擊力減小,橡膠墊更大的變形面積和更小的應變共同作用,導致最大沖擊力變化很小. 最大沖擊力的微小變化使反彈最高點沖擊力變化不大,變化不大的沖擊力和更小的最大變形量使碰撞時間單調減小.
3.2.4 橡膠材料特性對沖擊力的影響
機器人系統取表1和表2所示初值,令模型中的橡膠小變形貯能模量a分別為1.0、1.5、2.0和2.5 MPa,機器人與不同模量的橡膠墊發生落地碰撞時,碰撞過程特征時刻仿真數據如表6所示.
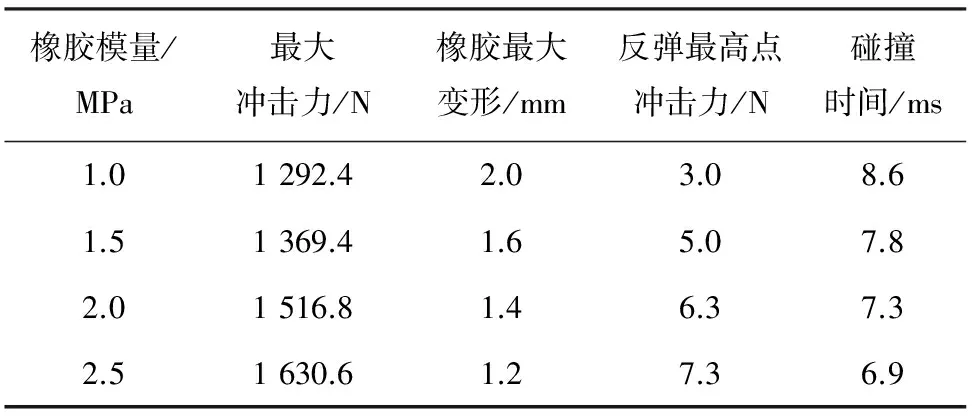
表6 橡膠模量a影響規律仿真數據
橡膠模量增加使貯能模量和黏性阻尼系數均單調增加,橡膠墊緩沖能力下降. 隨著橡膠模量的增加,最大沖擊力單調增加. 吸收支撐腿落地時刻相同的動能,需要更小的橡膠墊變形. 橡膠墊更大的沖擊反力和更小的變形共同作用,使反彈最高點沖擊力單調增加,碰撞時間單調減小.
機器人系統取表1所示初值,令橡膠材料耗能因子與頻率的比值n分別為0.005、0.010、0.015和0.020. 機器人與參數n不同的橡膠墊發生落地碰撞時,碰撞過程特征時刻仿真數據如表7所示.
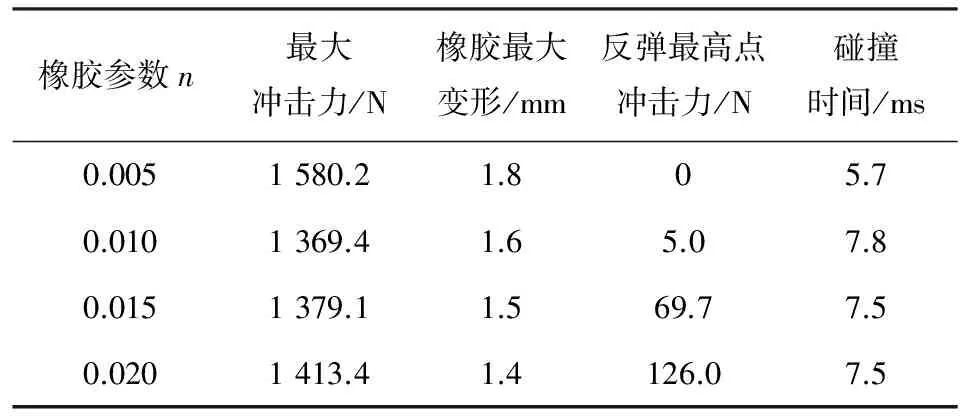
表7 橡膠參數n影響規律仿真數據
橡膠參數n增大使阻尼力單調增大. 隨著橡膠參數n的增大,壓縮階段初期支撐腿更大的速度產生更大的阻尼力,使支撐腿速度下降得更快,導致橡膠墊最大變形單調減小. 更小的彈性力與更大的阻尼力使支撐腿接近最低點的最大沖擊力出現先減小后增加的變化趨勢. 反彈階段更大的阻尼力使反彈最高點沖擊力快速增加,更小的橡膠變形和反彈位移與沖擊力共同作用,使碰撞時間呈現與最大沖擊力相反的變化趨勢. 當n=0.005時,由于阻尼力較小,機器人在5.7 ms后開始二次騰空.
4 垂直跳躍落地碰撞實驗
4.1 實驗臺介紹
單足機器人垂直跳躍實驗臺結構原理如圖1(a)所示,實驗臺照片如圖4所示,該機器人高0.85 m.

(a) 彈跳腿 (b) 實驗臺全景圖
Fig.4 Experiment table of the vertical constrained one-legged robot
實驗臺主要元器件如表8所示,其中活塞相對位移傳感器采用伺服氣缸內部集成的位移傳感器,位置檢測精度為0.001 mm.
4.2 落地碰撞實驗
機器人實驗系統各參數取表1所示初值,令氣缸上下腔封閉,機器人從0.1 m的高度自由下落,取機器人落地時刻作為碰撞過程的起始點. 圖5為根據實測數據繪制的活塞相對位移和兩腔氣壓曲線與仿真曲線比較圖.
表8 實驗臺主要元件清單
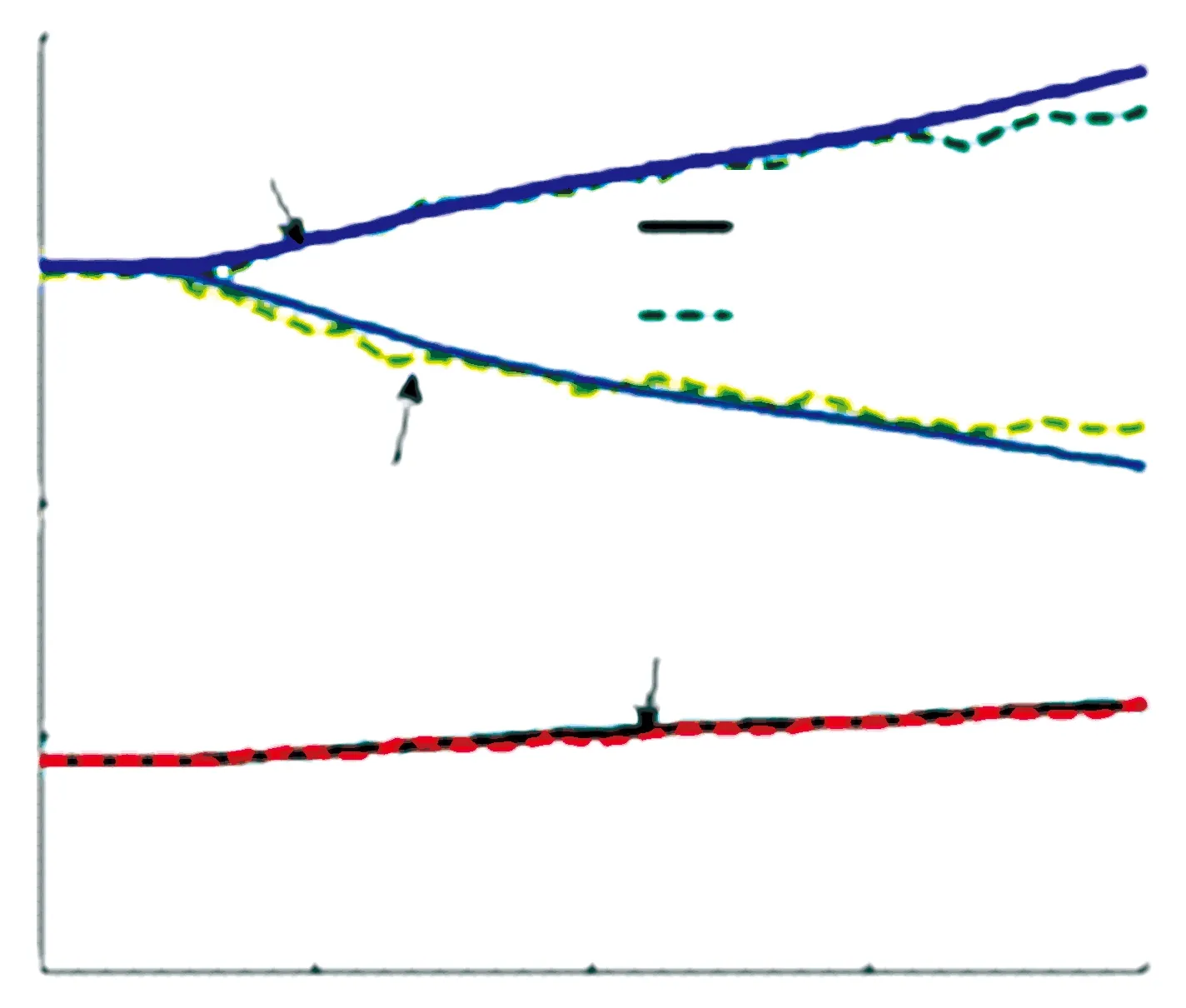
圖5 機器人自0.1 m落下實驗與仿真數據
Fig.5 Experimental data and simulation data of the robot for 0.1 m free fall
由圖5可以看出,各參數具有相同的變化規律,活塞相對位移、上下腔氣壓最大相對誤差分別為4.2%、7.6%和5.5%.
根據碰撞過程兩腔氣壓實測數據,使用機身運動方程可計算出機身運動規律,根據活塞相對機身位移數據可計算出支撐腿絕對位移和速度,借助支撐腿速度可計算出沖擊力. 根據實驗數據計算的機器人落地碰撞過程動態參數實驗曲線如圖6.
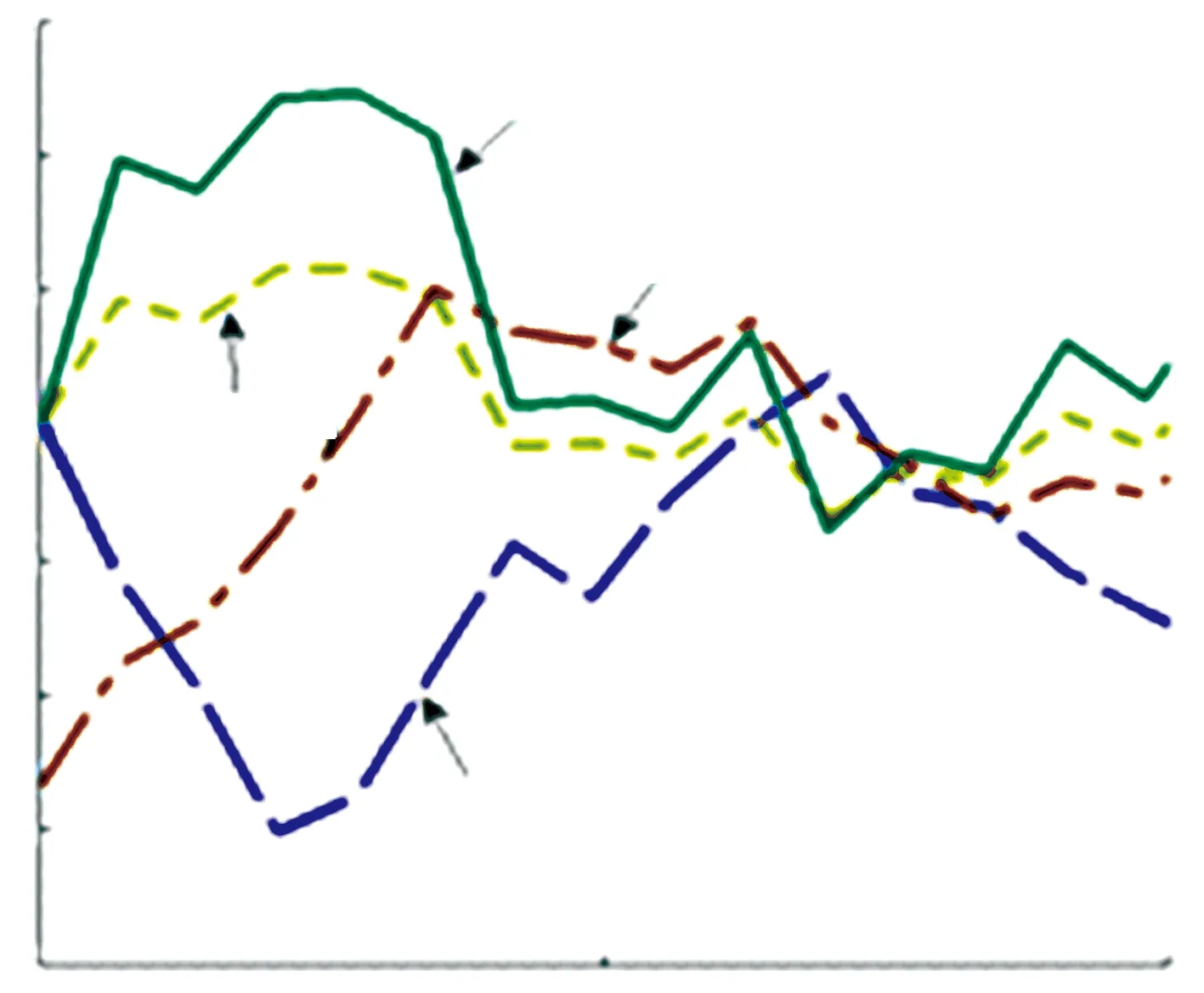
圖6 機器人自0.1 m落下支撐腿實驗曲線
比較圖6和圖3,各動態參數具有相同的變化規律,由于對實驗數據進行了濾波處理,實驗沖擊力的峰值略小于仿真曲線中的對應值,最大沖擊力相對誤差10.1%,最大速度相對誤差2.3%,最大位移相對誤差7.3%,實驗結果驗證了單足機器人落地碰撞模型和仿真結果的正確性.
5 結 論
1)針對垂直跳躍單足機器人球面尼龍足底與橡膠地面的碰撞過程,建立了由支撐腿和機身的動力學模型、橡膠地面大變形黏彈性力學模型和氣缸上下腔氣體熱力學模型組成的整體數學模型.
2)建立了機器人落地碰撞過程MATLAB仿真模型. 仿真結果表明,壓縮階段遞增的彈性力和先增后減的阻尼力使地面沖擊反力先增大后減小,恢復階段快速減小的彈性力和反向阻尼力共同作用導致沖擊反力單調減小. 最大沖擊力隨下落高度、橡膠貯能模量的增大和橡膠墊厚度的減小單調增大,隨橡膠耗能因子與頻率比值的增大先減小后增大.
3)搭建了單足機器人垂直跳躍落地碰撞實驗臺,0.1 m下落高度的實驗結果與仿真結果吻合良好,證明本文所做的理論分析、數學模型和仿真結果是正確的,為研究單足機器人自由跳躍時落地過程和全跳躍周期動態穩定性奠定了必要的基礎.
[1] RAIBER M H. Legged robots that balance [J]. IEEE Expert, 1986, 1(4): 89-89. DOI:10.1109/MEX.1986.4307016.
[2] ZEGLIN G. The bow leg hopping robot [D]. Pittsburgh: Camegie Mellon University, 1999. DOI: 10.1109/ROBOT.1998.677082.
[3] GREGORIO P, AHMADI M, BUEHLER M. Design, control, andenergetics of an electrically actuated legged robot [J]. IEEE Transactions on Systems Man and Cybernetics, 1997, 27(4): 626-634. DOI:10.1109/3477.604106.
[4] AHMADIM, BUEHLER M. Controlled passive dynamic running experiments with the ARL-Monopod II [J]. IEEE Transactions on Robotics, 2006, 22(5): 974-986. DOI:10.1109/TRO.2006.878935.
[5] ZEGLING J. Uniroo: a one legged dynamic hopping robot [D]. Cambridge: Massachusetts Institute of Technology, 1991.
[6] 葛文杰, 夏旭峰, 黃杰, 等. 基于雙質量彈簧模型的仿袋鼠機器人間歇跳躍落地穩定性研究 [J]. 西北工業大學學報, 2007, 25(4): 517-522. DOI:10.3969/j.issn.1000-2758.2007.04.011.
GE Wenjie, XIA Xufeng, HUANG Jie, et al. Exploring gait stability of kangaroo robot based on two-mass-one-spring model in intermittent touchdown phase [J]. Journal of North western Polytechnical University, 2007, 25 (4): 517-522. DOI:10.3969/j.issn.1000-2758.2007.04.011.
[7] 李哲, 蘇興旺, 閻宏偉, 等. 氣動彈跳腿垂直方向穩定跳躍研究 [J]. 機器人, 2013, 35(3): 306-312. DOI: 10.3724/SP.J.1218.2013.00306.
LI Z, SU X W, YAN H W, et al. Stable hopping of a pneumatically actuated leg in vertical direction[J]. Jiqiren/robot, 2013, 35(3): 306-312 DOI: 10.3724/SP.J.1218.2013.00306.
[8] WAGGD J. A note on coefficient of restitution models including the effects of impact induced vibration [J]. Journal of Sound and Vibration, 2007, 300(3/4/5): 1071-1078. DOI: 10.1016/j.jsv.2006.08.030.
[9] YAO Wenli, CHEN Bin, LIU Caishan. Energetic coefficient of restitution for planar impact in multi-rigid-body systems with friction [J]. International Journal of Impact Engineering, 2005, 31(3): 255-265. DOI: 10.1016/j.ijimpeng.2003.12.007.
[10]BOGRADS, REUSS P, SCHMIDT A. Modeling the dynamics of mechanical joints [J]. Mechanical Systems and Signal Processing, 2011, 25(8): 2801-2826. DOI: 10.1016/j.ymssp.2011.01.010.
[11]HUNT K H, CROSSLEY F R E. Coefficient of restitution interpreted as damping in vibroimpact [J]. Journal of Applied Mechanics, 1975, 42(2): 440-445. DOI: 10.1115/1.3423596.
[12]LANKARANIH M, NIKRAVESH P E. A contact force model with hysteresis damping for impact analysis of multibody systems [J]. Journal of Mechanical Design, 1990, 112 (3): 369-376. DOI: 10.1115/1.2912617.
[13]LI Zhe, YAN Hongwei, JI Jun. On dynamic characteristics of the vertical hopping of the one-legged robot [J]. Jiqiren/robot, 2015, 37(4): 467-477. DOI: 10.13973/j.cnki.robot.2015.0467.
[14]FLORES P, MACHADO M, SILVA M T. On the continuous contact force models for soft materials in multibody dynamics [J]. Multibody System Dynamics, 2011, 25(25): 357-375. DOI: 10.1007/s11044-010-9237-4.
[15]中國國家標準化管理委員會. 硫化橡膠或熱塑性橡膠壓縮應力應變性能的測定: GB/T 7757—2009/ISO 7743[S]. 北京: 中國標準出版社, 2009.
Standardization Administration of the People’s Republic of China. Rubber, vulcanized or thermoplastic determination of compression stress-strain properties: GB/T 7757—2009/ISO7743[S]. Beijing: Standards Press of China, 2009.
[16]TRELOAR L R G. The elasticity of a network of long-chain molecules [J]. Transactions of the Faraday Society, 1946, 42(4): 83-94. DOI:10.1039/tf9433900241.
[17]布朗, 張秀英. 橡膠的動態應力應變性能 [J]. 炭黑工業, 1998(6): 24-29.
BROWN R P, ZHANG X Y. Dynamic stress and strain of rubber [J].Carbon Black Industry, 1998(6):24-29.
Analysis of landing impact force of the one-legged robot vertical hopping
LI Zhe, GAO Jun
(School of Naval Architecture and Ocean Engineering, Harbin Institute of Technology, Weihai 264209, Shandong, China)
Studying the dynamic regulation of the landing impact forces and influence factors for landing impact is the basis of analysis of the dynamic stability of robots. Considering that the rubber mat in landing phase is in large deformation during the landing process of robot, the dynamic model and simulation model of the landing impact process that consists of the dynamic models of robot’s leg and body, the viscoelastic model of rubber floor in large deformation and the thermodynamics model of gas in cylinder chambers are built. In addition, the simulation results show that the change of foundation elastic reaction and damping force in the compression phase makes impact force increase quickly, reach a maximum and then decrease, that the maximum impact increases as the falling height and the storage module of rubber increase, decreases as the thickness of the rubber increases, and that the larger ratio, the smaller maximum impact when the ratio of the dissipative energy scale factor to the vibration frequency is less than 0.01, and the larger ratio, the larger maximum impact when the ratio is more than 0.01. The maximum relative error of simulation results and experiment results of the robot for 0.1 m free fall is less than 7.6%, which verifies the simulation results.
one-legged robot; vertical hopping; landing impact; rubber model; impact analysis
2016-05-10
機器人技術與系統國家重點實驗室開放基金項目(SKLRS-2011-MS-02)作者簡介: 李 哲(1961—),男,教授,博士生導師
李 哲,Lizhe0223@sina.com
TP242
A
0367-6234(2017)07-0027-06
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
中華詩詞(2020年1期)2020-09-21 09:24:52
數學物理學報(2020年2期)2020-06-02 11:29:24
小學生作文(中高年級適用)(2018年5期)2018-06-11 01:22:56
數學小靈通·3-4年級(2017年10期)2017-11-08 08:42:59
中學生數理化·七年級數學人教版(2017年11期)2017-04-23 07:18:00
數學大王·中高年級(2016年12期)2016-12-26 21:37:36
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03