面向數(shù)字舞臺表演的海龜機器人系統(tǒng)研制
2017-07-10 10:26:57管貴森徐文福梁國偉
哈爾濱工業(yè)大學學報 2017年7期
黃 亮, 管貴森, 徐文福, 梁國偉
(1.哈爾濱工業(yè)大學 深圳研究生院, 廣東 深圳 518055;2.深圳數(shù)字舞臺表演機器人技術(shù)工程實驗室(哈爾濱工業(yè)大學深圳研究生院), 廣東 深圳 518055)
面向數(shù)字舞臺表演的海龜機器人系統(tǒng)研制
黃 亮1,2, 管貴森1,2, 徐文福1,2, 梁國偉1,2
(1.哈爾濱工業(yè)大學 深圳研究生院, 廣東 深圳 518055;2.深圳數(shù)字舞臺表演機器人技術(shù)工程實驗室(哈爾濱工業(yè)大學深圳研究生院), 廣東 深圳 518055)
針對所創(chuàng)作的機器人戲劇劇本,研制一套用于數(shù)字舞臺表演的大型海龜機器人系統(tǒng). 該機器人由機械系統(tǒng)和控制系統(tǒng)組成,機械部分由4條3DOF模塊化輕型腿、一套具有連續(xù)曲率的柔性脖子、龜殼開合裝置和碳纖維框架組成,所有電機、電路板等機電部件安裝于軀干中,通過同步帶將電機的運動傳遞到外端,降低了懸臂部分的尺寸和質(zhì)量,減輕了電機的負載. 系統(tǒng)的控制部分由上位機及嵌入式控制器組成,分別提供頂層的人機交互和底層的關(guān)節(jié)實時控制功能. 采用重心自調(diào)整的方法規(guī)劃運動步態(tài),確保多足運動的穩(wěn)定性. 經(jīng)大量實驗,研制、開發(fā)了樣機,完成了機器人戲劇的公演,所研制的機器人可以完美地演繹戲劇角色,外形美觀,惹人喜愛,表演效果極佳.
機器人戲劇;表演機器人;仿生海龜機器人;步態(tài)規(guī)劃;數(shù)字舞臺
機器人戲劇(robot theater)是近年來剛提出的概念,指由機器人或機器人與人共同演繹的舞臺表演藝術(shù)[1],它是文化與科技高度融合的典范,其充分利用現(xiàn)有的成熟技術(shù)如機器人技術(shù)、多傳感器融合、全息3D投影等,然后加以藝術(shù)創(chuàng)造和升華[2],是一種全新的藝術(shù)表現(xiàn)形式. 人和機器人的互動,作為一個跨學科領(lǐng)域,對機器人的形象、動作姿態(tài)和情感的表達提出了非常高的要求[3]. 在戲劇中扮演相應角色的機器人稱為表演機器人(performing robot),具有極強的觀賞性和趣味性,其涉及機械、電子、自控、通訊、機器人學和仿生材料等多個領(lǐng)域[4].
最早用于表演的機器人主要為人形機器人,包括日本的阿西莫機器人[5]、法國的NAO機器人[6]、韓國的HUBO機器人[7]等,它們常用于進行舞蹈表演. 另外,學者們還研制了進行單項表演的鋼琴演奏機器人[8]、小提琴演奏機器人[9]、伴舞機器人[10]、歌唱機器人[11]等. 2014年5月,世界上第一支機器人重金屬樂隊“壓縮機頭”(compressorhead)亮相莫斯科,該樂隊有3名成員,高約1.52 m,包括長著4條手臂的鼓手“棍子男孩”、長著79根指頭的吉他手“手指頭”以及貝斯手“骨頭”,全部由廢棄金屬打造. 另外,情感機器人也可用于表演[12-14]. 中國在機器人表演方面起步較晚,目前主要利用國外的人形機器人進行離線編程,以完成規(guī)定的舞蹈動作. 典型代表是參與2016年猴年春晚的優(yōu)必選阿爾法機器人和參與了2012年龍年春晚的哈爾濱工業(yè)大學所編排的“機器人總動員”,引起了極大關(guān)注. 然而,如果無故事情節(jié)的演繹,單純的機器人舞蹈或彈唱表演,還無法稱之為機器人戲劇[15]. 實際上,機器人戲劇近幾年才真正走上舞臺. 2008年,日本公演了“機器人是杰斯克的玫瑰花”[16],由兩臺機器人和兩名真人演員同臺表演. 2010年,日本產(chǎn)業(yè)技術(shù)綜合研究所開發(fā)了外觀和動作接近人類形象和動作的人形機器人HRP-4C[16],并當眾進行了表演. 由機器人參與表演的話劇《再會》也在日本東京藝術(shù)節(jié)上演,該機器人擁有棕色明眸,梳著棕色中分長發(fā),聲音平靜,與一群真人演員共同完成表演. 已成功上演的機器人戲劇還包括“我和工作”、“森林深處”等,都給人們留下了深刻的印象[16]. 用于表演的機器人,運動規(guī)劃要求極高,雖然舞臺的環(huán)境不像非結(jié)構(gòu)化環(huán)境需要采用復雜的規(guī)劃方法[17],但是,安全性、實時性、節(jié)奏性要求更高. 也由于表演的特殊性,關(guān)注的交點也與傳統(tǒng)的移動機器人[18-19]的設計有所不同.
實驗室創(chuàng)作了主人公‘豆芽菜’在各種機器人小伙伴的幫助下,不遠萬里尋找媽媽的機器人話劇故事. 本文針對該劇中龜奶奶的角色,結(jié)合仿生技術(shù),研制了一套大型海龜機器人,并建立運動學模型,規(guī)劃舞臺表演的步態(tài),最后進行了樣機實驗,并在舞臺上成功完成了表演. 與以往海龜機器人[20]或其他四足機器人[21]不同,本劇中的海龜機器人工作于舞臺環(huán)境,除了外形、運動形式與海龜相似外,機器人的尺寸、體積要足夠大,且脖子運動要求十分靈活,在舞臺上可以與觀眾進行友好互動[22].
1 面向表演的海龜機器人技術(shù)要求
海龜機器人在話劇中扮演主人公豆芽菜的“奶奶”,具有穩(wěn)定行走、多機器人協(xié)調(diào)、人-機協(xié)調(diào)、龜殼開合、避障、遠程控制等功能. 除此之外,海龜機器人滿足如下技術(shù)指標要求:系統(tǒng)質(zhì)量<10 kg,外形尺寸小于800 mm600 mm300 mm, 頭-頸部長度:300 mm,爬行速度≥0.3 m/s,負載能力(除自重外)2 kg,連續(xù)工作時間>0.5 h,無線操作距離>30 m.
2 海龜機器人系統(tǒng)設計
2.1 系統(tǒng)組成
海龜機器人系統(tǒng)由軀干、腿部、脖子部、龜殼開合、電源及控制器等組成. 為減輕質(zhì)量并保證結(jié)構(gòu)強度,軀干采用碳纖維材料框架機構(gòu),4條腿成對稱性分布,每條腿部具有3個自由度,共12個自由度;龜殼開合裝置有1個自由度,由1個電機控制,脖子為柔性結(jié)構(gòu),由4個有刷電機牽引繩索驅(qū)動控制. 其機構(gòu)簡圖如圖 1所示, 3D模型如圖 2所示.
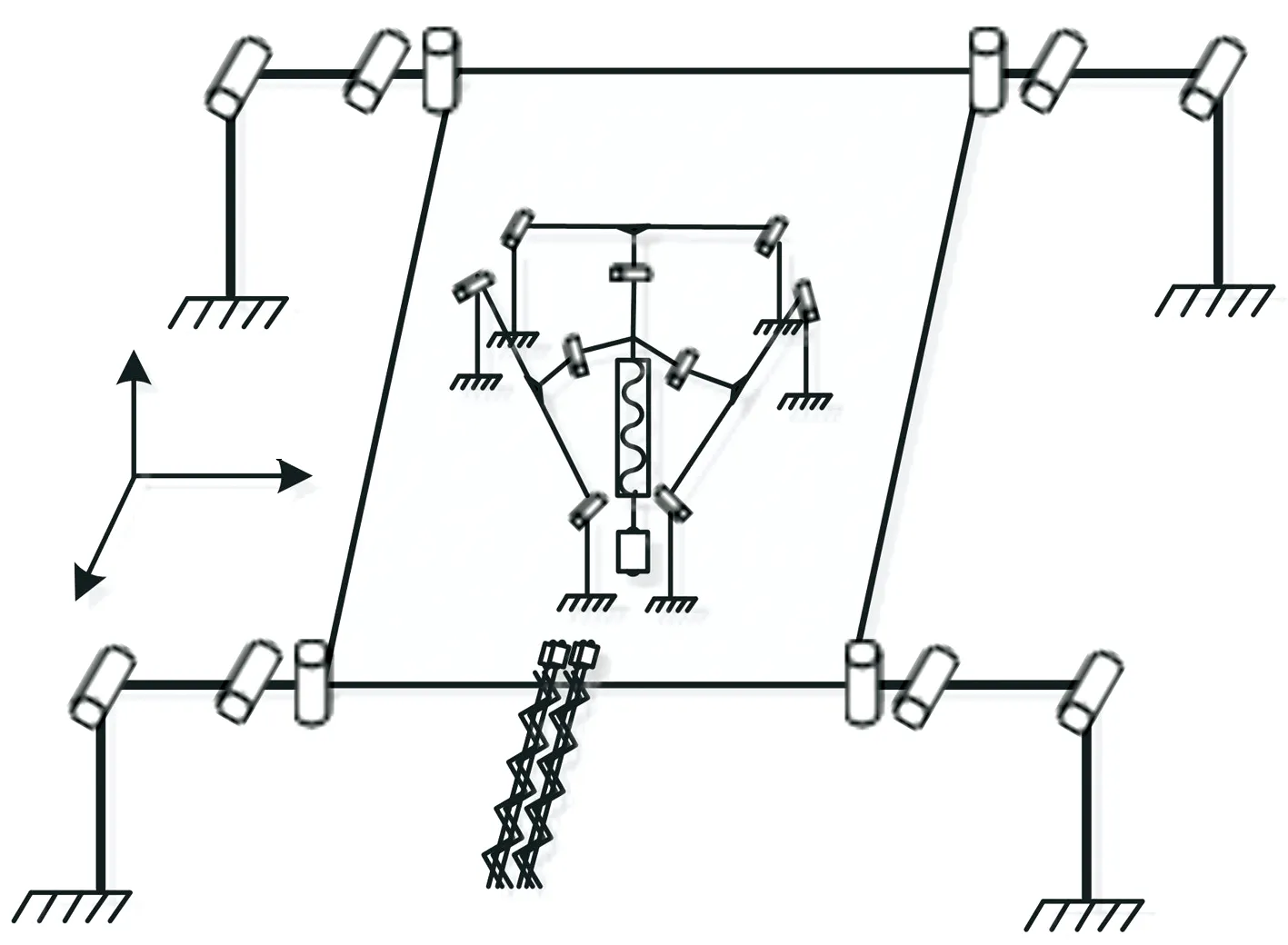
圖1 海龜機器人系統(tǒng)機構(gòu)運動簡圖
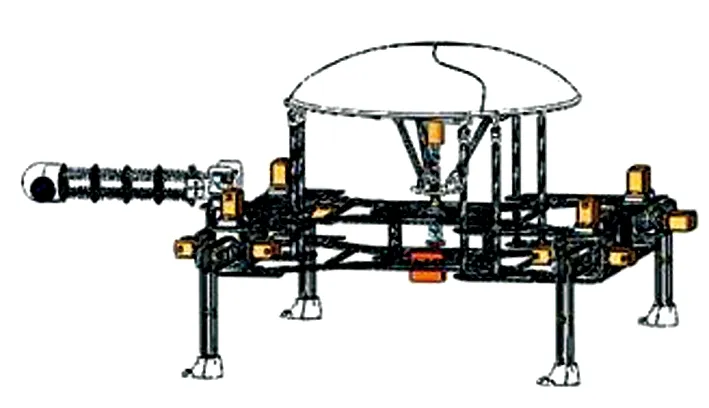
(a)龜殼合上時
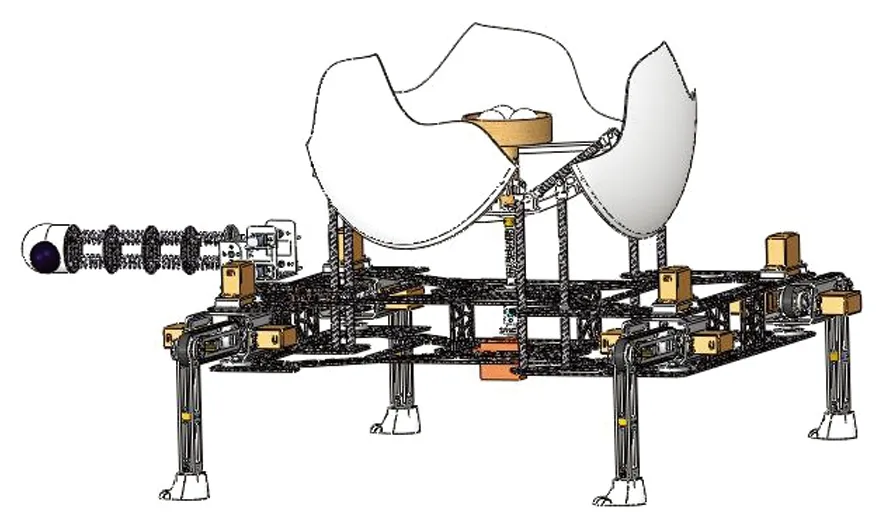
(b)龜殼打開時
2.2 海龜機器人腿部結(jié)構(gòu)
海龜機器人由4個完全相同的腿部結(jié)構(gòu)組成,每個腿部設計有3個關(guān)節(jié),每個關(guān)節(jié)都包含驅(qū)動電機,舵盤、金屬框架、傳動帶等部件. 和傳統(tǒng)關(guān)節(jié)型腿部結(jié)構(gòu)相比,占主要重量的舵機、電路板等機電部件安裝于腿的根部與軀干相連的地方,通過傳動帶將電機的運動轉(zhuǎn)移到外端桿件的連接處,大大降低了腿部懸臂部分的尺寸和質(zhì)量,減輕了電機的負載,最大程度地提高關(guān)節(jié)電機驅(qū)動能力,使機器人能夠更加平穩(wěn)的行走,具有傳動效率高、傳動速度快等優(yōu)點. 2.3 海龜機器人柔性脖子柔性脖子裝置包含動力系統(tǒng)、驅(qū)動系統(tǒng)、連接部件和本體結(jié)構(gòu). 脖子采用繩索驅(qū)動方式,動力系統(tǒng)主要為直流有刷電機和齒輪減速裝置;驅(qū)動系統(tǒng)為電機驅(qū)動器;連接部件為輕質(zhì)金屬材料框架,其固定在軀干上,前后分別連接動力系統(tǒng)和本體結(jié)構(gòu);本體結(jié)構(gòu)為彈簧連接在開有連接孔的碳纖維固定板上,通過直流電機牽引鋼絲繩,進而鋼絲繩拉動彈簧,即實現(xiàn)柔性脖子機構(gòu)按照預定的方式進行運動. 柔性脖子的裝配圖如圖 3所示,總長400 mm,包含250 mm的本體長度.
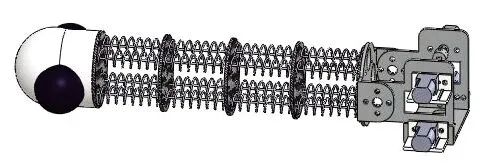
圖3 柔性脖子機構(gòu)
Fig.3 The mechanism of the flexible neck
2.4 龜殼開合機構(gòu)
根據(jù)舞臺表演需要,龜殼可以自由開合,打開后的外形為杜鵑,通過打開的龜殼可以看到海龜身體中的"珍珠",利用固定在機器人身體內(nèi)部的噴霧器和燈光,打造十分絢麗的視覺效果. 如圖 4所示,龜殼開合機構(gòu)主要為動力系統(tǒng)和連桿機構(gòu). 動力系統(tǒng)由360°舵機、舵盤和絲杠組成;而連桿機構(gòu)為3個完全相同的曲柄滑塊結(jié)構(gòu),電機正反轉(zhuǎn)實現(xiàn)龜殼的開合.
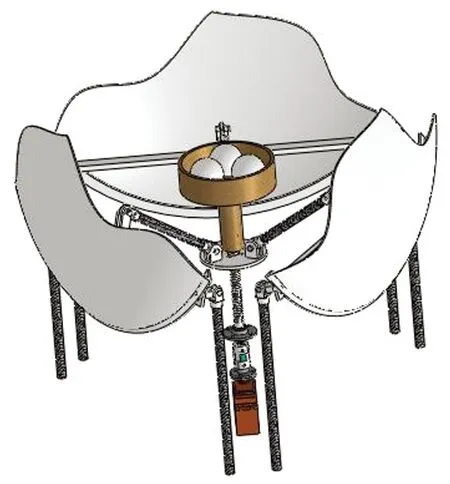
圖4 龜殼開合裝置設計
2.5 海龜機器人控制系統(tǒng)
海龜機器人的控制結(jié)構(gòu)包括3層,即決策層,處理層和執(zhí)行層,如圖 5所示.
在處理芯片的選擇方面,綜合考慮FPGA、DSP和ARM,在對比成本、開發(fā)難易程度和開發(fā)周期后選擇ARM芯片,ARM芯片內(nèi)部集成了多組定時器和眾多的I/O接口,可以大大簡化控制的難度和硬件的體積. 在決策層,集成了很多有用的資源,包括USART,64 kB SRAM、512 kB FLASH,12位ADC,16位定時器,CAN,SPI等,內(nèi)核是ARM CORTEX-M3 CPU. 在處理層,采用NRF24L01無線通信方式基于SPI接口實現(xiàn)上位機與下位機之間的通信連接. 上位機為一個簡單的控制手柄,可以向主控制器發(fā)送指令,定時器控制接口將PWM信號發(fā)送給執(zhí)行器,I/O口電平的高低控制直流有刷電機,控制電機旋轉(zhuǎn). 在執(zhí)行層,腿部的電機由定時器1、2、3、4分別控制,龜殼開合裝置由高級定時器8控制,脖子裝置通過直流電機驅(qū)動器控制.
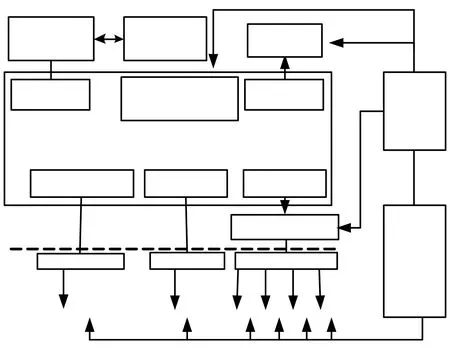
圖5 海龜機器人控制系統(tǒng)
2.6 運動控制的實現(xiàn)
基于嵌入式實時操作系統(tǒng)uc/os-ii操作系統(tǒng)開發(fā)了海龜機器人的運動軟件,結(jié)構(gòu)見圖 6.
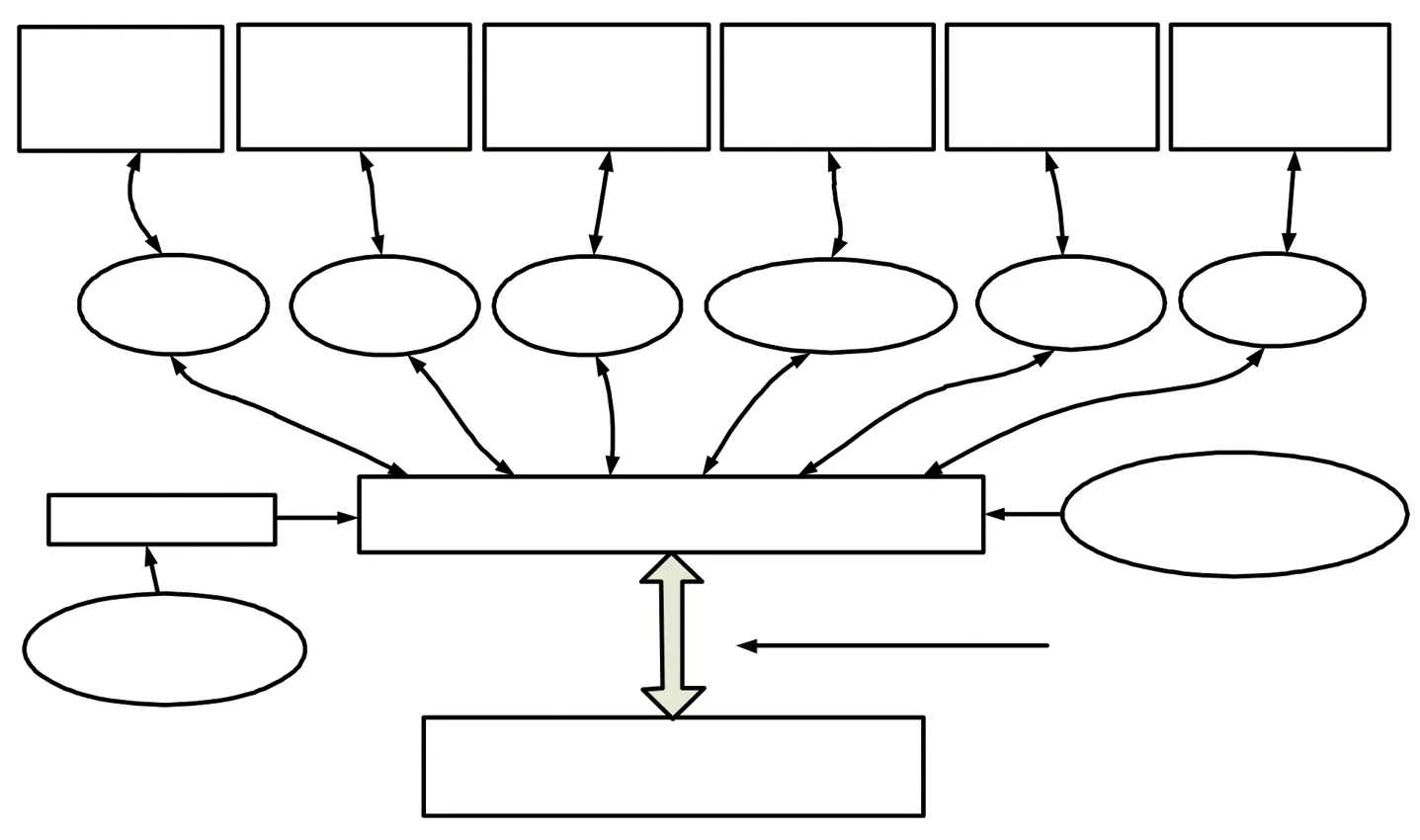
圖6 運動控制軟件框圖
運用uc/os-ii操作系統(tǒng)的多任務管理機制,共需要建立6個任務,其中包含兩個系統(tǒng)本身必須存在的任務:統(tǒng)計任務和空閑任務,分別用于計算CPU的利用率和統(tǒng)計沒有任務執(zhí)行時的計數(shù). 根據(jù)機器人運動要求需要新建立的任務有開始任務、按鍵監(jiān)測任務、運動控制任務和NRF24L01無線通訊任務. 開始任務主要負責其余幾項任務的創(chuàng)建然后自動掛起;按鍵監(jiān)測任務主要負責掃描電路板鍵盤的按鍵后獲得鍵值并執(zhí)行相應的任務;運動控制任務主要負責海龜機器人運動步態(tài)的控制. 即舵機和直流電機的控制. 運動控制程序主要是uc/os-ii操作系統(tǒng)中運動控制任務的創(chuàng)建、掛起和各個相關(guān)任務下執(zhí)行函數(shù).
3 機器人步態(tài)規(guī)劃及其動力學仿真
3.1 海龜機器人步態(tài)規(guī)劃方式
穩(wěn)定性是四足機器人的運動過程中的主要問題,按照步態(tài)穩(wěn)定性類型可以將四足機器人運動方式分為靜態(tài)穩(wěn)定性運動和動態(tài)穩(wěn)定性運動. 靜態(tài)運動即重心垂直投影始終在支撐腿形成的多邊形區(qū)域內(nèi)部;而動態(tài)運動為重心的垂直投影在某些時刻可以不必處于支撐腿形成的區(qū)域內(nèi),而是處于一種動態(tài)平衡的運動過程. 控制方法如下:
1)步態(tài)模式選擇. 選擇每條腿的狀態(tài)如爬行、小跑、快跑等,運動狀態(tài)決定了機器人靜態(tài)運動或者動態(tài)運動.
2)步態(tài)規(guī)劃. 規(guī)劃的擺動腿著地點的位置、姿態(tài)參數(shù)和支撐腿的抬起位置和姿態(tài)參數(shù)對機器人行走的速度、加速度、平滑性和穩(wěn)定性有很大的影響.
3)軌跡規(guī)劃. 規(guī)劃機器人肢體末端點的行走軌跡曲線,這對行走的速度影響最大.
本機器選擇爬行步態(tài)作為步態(tài)模式. 理論分析和仿真表明“腿3—腿2—腿4—腿1”的抬跨順序最為穩(wěn)定. 規(guī)劃設計時需要首先規(guī)劃步態(tài)周期T、單步長度即步幅L、抬腿高度H. 設置運動周期T=8 s,步幅為L=140 mm,抬腿高度H=40 mm. 足端的加速度曲線應該是平滑的,沒有大幅度的突變,最大程度上減小海龜機器人運動過程中擺動腿初始接觸地面時受到的沖擊力,進而提高機器人運動的穩(wěn)定性,足端軌跡采用半橢圓和直線組合軌跡,將運動軌跡設計成半橢圓形.
3.2 典型步態(tài)規(guī)劃
四足機器人最典型的靜態(tài)行走步態(tài)是爬行步態(tài),爬行步態(tài)可以采用靜態(tài)穩(wěn)定判據(jù)作為標準的爬行步態(tài). LH、LF、RH、RF分別表示左后腿、左前腿、右后腿、右前腿,這里只研究占空比β= 3/4的臨界連續(xù)爬行狀態(tài),機器人擺腿順序依次為LHLFRHRF,連續(xù)爬行步態(tài)是四足移動機器人爬行的一般情況,為了加快整個機器人的步行速度和提高機器人整體運動的協(xié)調(diào)性,在擺動腿擺動的同時,軀體也相應移動,但這是以犧牲穩(wěn)定裕度為代價的. 機器人其中一肢體抬起后著地的瞬間,另一肢體抬起,按照上面規(guī)定的順序如此循環(huán)反復,任何時刻都不存在4條腿同時著地過程.
機器人的運動分為2種狀態(tài),擺腿狀態(tài)和重心調(diào)整狀態(tài). 處于擺腿狀態(tài)時,擺動腿向前達到下一著地點,處于重心斜側(cè)調(diào)整狀態(tài)時,4肢體全部處于著地狀態(tài),通過調(diào)整重心來增大穩(wěn)定裕度,為了保證機器人取得足夠的穩(wěn)定裕度,需要在運動周期內(nèi)加入重心調(diào)整狀態(tài).
連續(xù)爬行步態(tài)穩(wěn)定裕度趨近于零,在實際情況下,機器人運動過程不穩(wěn)定,容易出現(xiàn)向肢體擺動側(cè)傾倒,所以要在一個完整步態(tài)周期內(nèi)增加四足著地支撐階段,來調(diào)整軀干位置使重心投影在穩(wěn)定區(qū)域內(nèi). 這種狀態(tài)叫間歇型爬行步態(tài). 步態(tài)示意圖如圖 7所示.
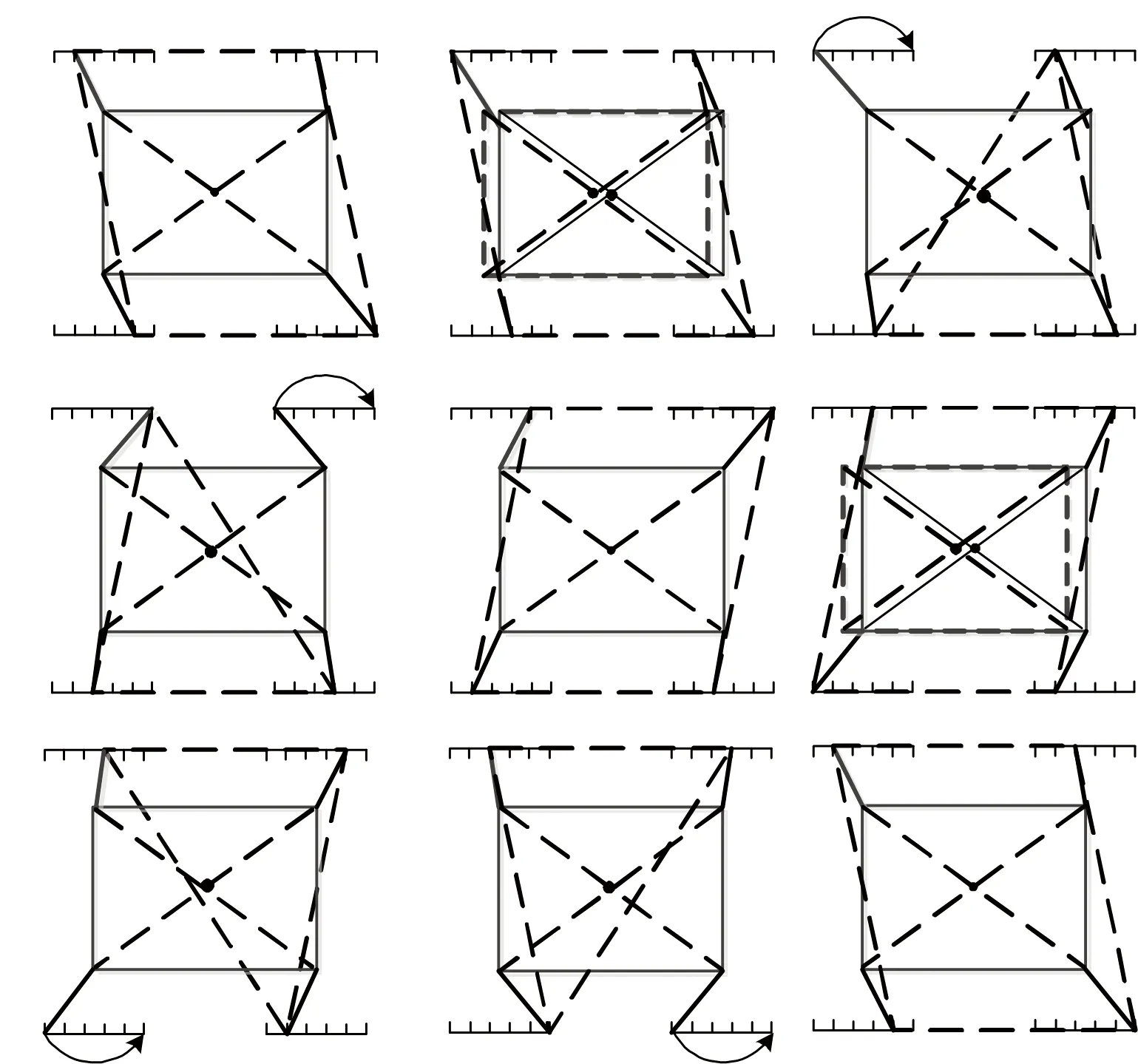
圖7 間歇性爬行步態(tài)示意
3.3 基于斜側(cè)向重心調(diào)整的步態(tài)規(guī)劃
在一般情況下,步態(tài)規(guī)劃假設一條腿的質(zhì)量比較小,其相對于軀體的質(zhì)量來說可以忽略不計,這種機器人模型叫做理想模型. 在理想模型下,機器人重心與幾何中心重合,只需要保證幾何中心保持在支撐多邊形區(qū)域內(nèi)部就可以規(guī)劃出保證穩(wěn)定行走的步態(tài). 然而在實際情況下,爬行機器人大都是關(guān)節(jié)驅(qū)動和執(zhí)行機構(gòu)直接固連在轉(zhuǎn)動關(guān)節(jié)上,因此每個肢體相對于軀體來說是不能忽略的,肢體的運動影響到機器人的整體重心位置,進而對海龜機器人的穩(wěn)定行走產(chǎn)生較大影響,所以在這里只考慮軀干重心的機器人理想模型步態(tài)規(guī)劃方法不成立. 因此,這里采用基于斜側(cè)向重心調(diào)整的步態(tài)優(yōu)化(也稱重心自調(diào)整方法,即COG self-adjusting method).
實驗發(fā)現(xiàn),即使機器人幾何中心處在三角形支撐區(qū)域內(nèi)部,在某些時刻重心位置也可能投影到三角形支撐區(qū)域外部,機器人會傾倒,因此需要設計一個方法使重心位置在整個運動過程中始終維持在三角形支撐區(qū)域內(nèi),且穩(wěn)定裕度要足夠大,實現(xiàn)靜態(tài)穩(wěn)定行走. 斜側(cè)向調(diào)整重心能有效地解決這個問題,見圖8. 基于此方法優(yōu)化后的步態(tài)抬步態(tài)見圖9.
優(yōu)化步態(tài)的運動過程具體執(zhí)行過程如下:
1)四足支撐調(diào)整重心前移距離A,同時向右側(cè)移動距離m,消耗時間0.1T,此時重心向右偏移;
2)LH腿完成一次抬放動作,重心前移距離A,此過程消耗時間0.2T;
3)LF腿完成一次抬放動作,重心前移距離A,此過程消耗時間0.2T;
4)四足支撐調(diào)整重心前移距離A,向左側(cè)移動距離m,消耗時間0.1T,此時重心向左偏移;
5)RH腿完成一次抬放動作,重心前移距離A,消耗時間0.2T;
6)RF腿完成一次抬放動作,重心前移距離A,消耗時間0.2T.
通過斜側(cè)向調(diào)整重心的方法,可以使機器人的重心投影始終在支撐腿著地點形成的多邊形區(qū)域內(nèi)部,進而增大了機器人運動過程中的穩(wěn)定裕度. 當考慮腿部對重心位置的影響時,可以避免失穩(wěn)的情況.
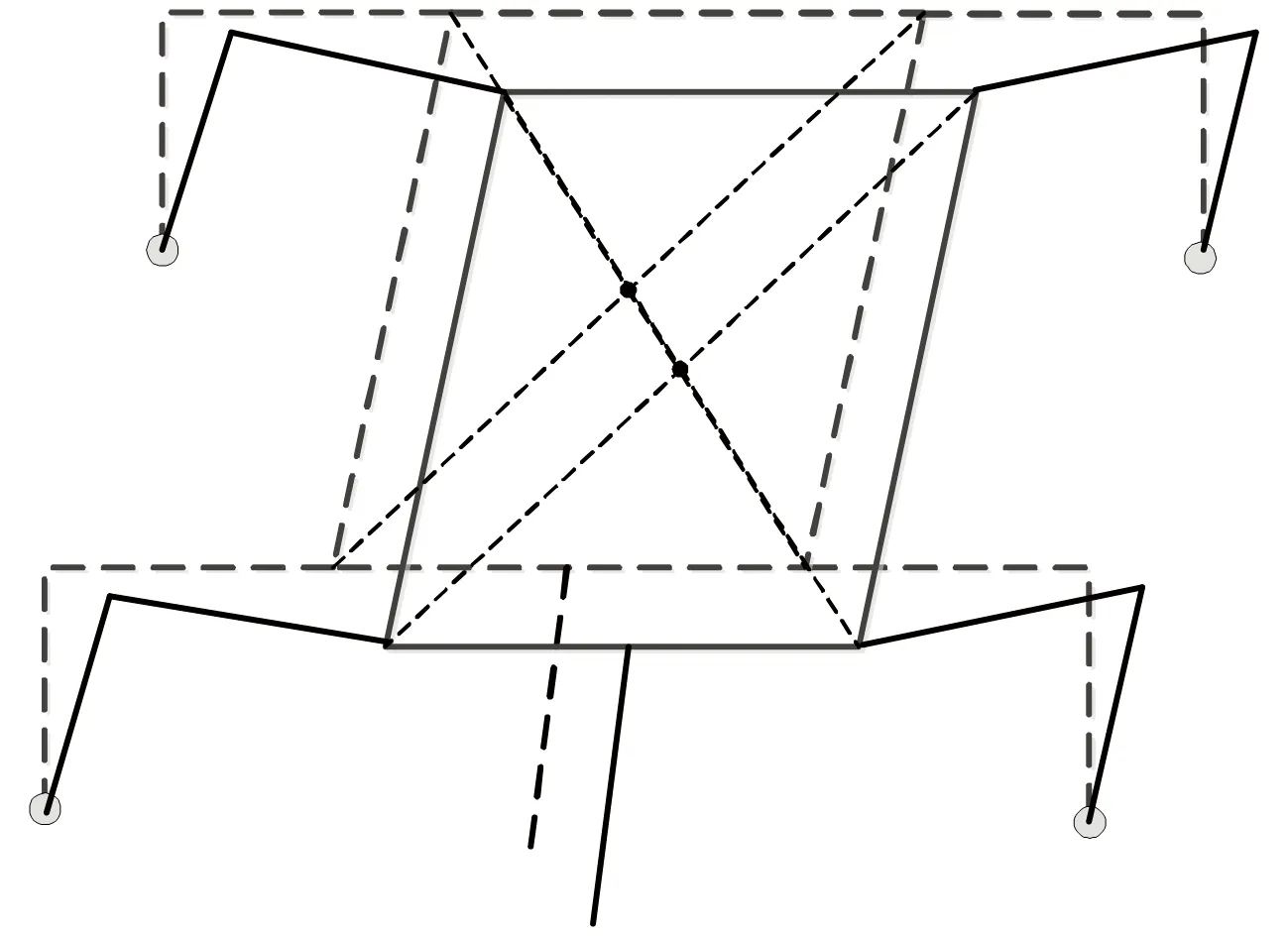
圖8 斜側(cè)向調(diào)整重心方法

圖9 基于重心斜側(cè)向調(diào)整的步態(tài)示意
Fig.9 The schematic plot of the gait generated using the COG self-adjusting method
3.4 基于Webots的動力學仿真
本文基于Cyberbotics公司的Webots軟件建立了海龜機器人仿真模型,子節(jié)點包含軀干、左前腿、左后腿、右前腿、右后腿、龜殼、脖子、左眼、右眼. 并對所提出的斜側(cè)向重心調(diào)整步態(tài)規(guī)劃方法進行仿真,運動過程見圖10.
在仿真平臺里,海龜機器人模型的各個關(guān)節(jié)連接處添加力矩傳感器,力矩傳感器可以實時采集運動中各關(guān)節(jié)的力矩數(shù)值. 利用仿真軟件中自帶的函數(shù)wb_servo_get_motor_force_feedback()采集仿真中的關(guān)節(jié)力矩數(shù)據(jù),然后保存為數(shù)據(jù)文檔,后續(xù)可在Matlab中進行進一步數(shù)據(jù)分析. 限于篇幅,在此僅給出運動過程中腿1各關(guān)節(jié)的驅(qū)動力矩,見圖11,而所有腿部各關(guān)節(jié)的驅(qū)動力矩變化范圍列于表1中. 可以看出,最大驅(qū)動力矩發(fā)生在各腿的膝關(guān)節(jié),大約為19 N·m,該數(shù)據(jù)作為電機選型的參考.
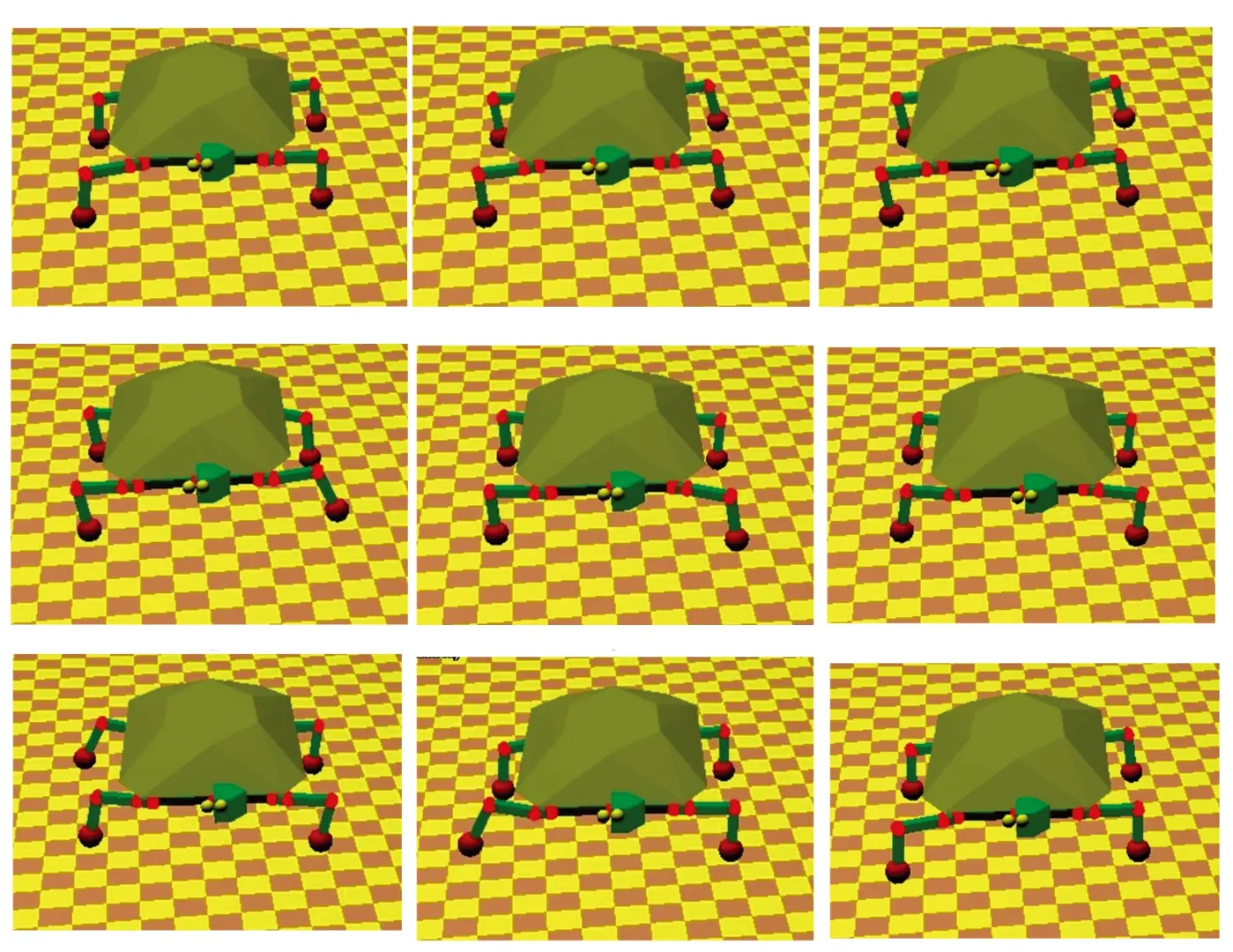
圖10 Webots步態(tài)仿真
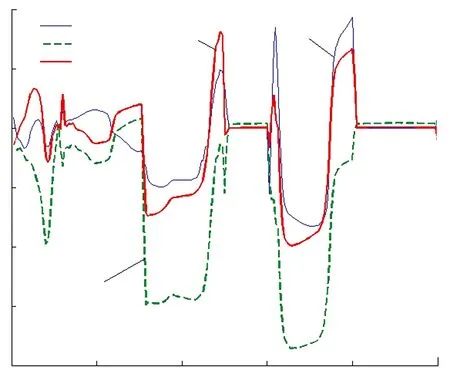
圖11 腿1的3個關(guān)節(jié)力矩
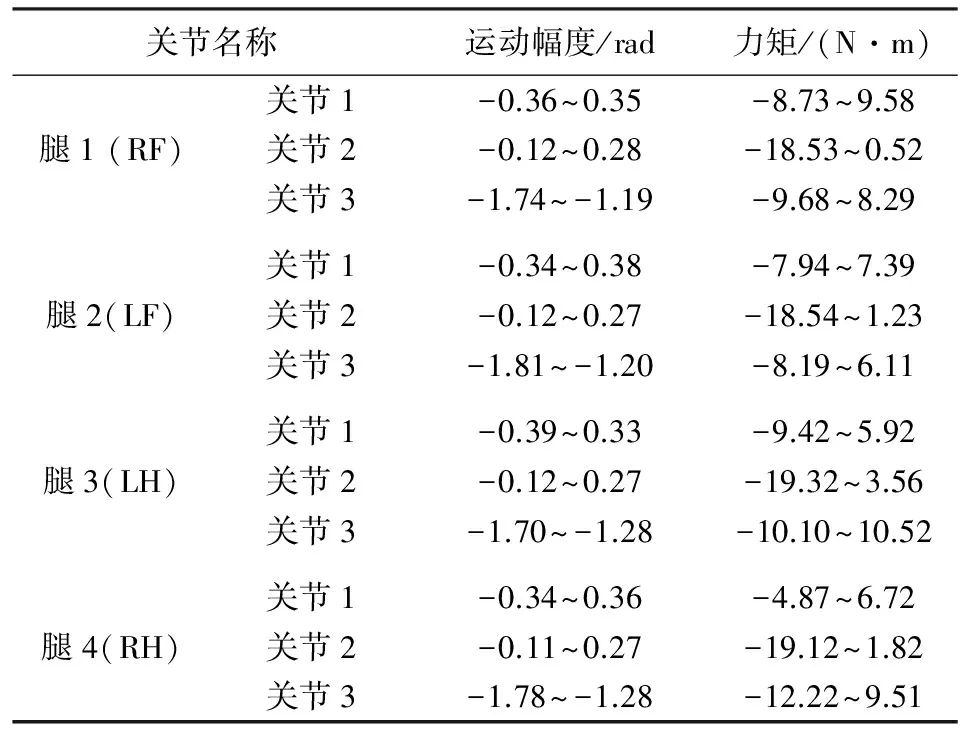
關(guān)節(jié)名稱運動幅度/rad力矩/(N·m)關(guān)節(jié)1-0.36~0.35-8.73~9.58腿1(RF)關(guān)節(jié)2-0.12~0.28-18.53~0.52關(guān)節(jié)3-1.74~-1.19-9.68~8.29關(guān)節(jié)1-0.34~0.38-7.94~7.39腿2(LF)關(guān)節(jié)2-0.12~0.27-18.54~1.23關(guān)節(jié)3-1.81~-1.20-8.19~6.11關(guān)節(jié)1-0.39~0.33-9.42~5.92腿3(LH)關(guān)節(jié)2-0.12~0.27-19.32~3.56關(guān)節(jié)3-1.70~-1.28-10.10~10.52關(guān)節(jié)1-0.34~0.36-4.87~6.72腿4(RH)關(guān)節(jié)2-0.11~0.27-19.12~1.82關(guān)節(jié)3-1.78~-1.28-12.22~9.51
4 樣機集成及實驗研究
基于上述設計,研制了海龜機器人樣機,并開展了運動步態(tài)實驗,同時,完成了舞臺劇《來到深圳的豆芽菜》的公演. 舞臺表演用海龜機器人的外觀設計效果如圖 12所示.

圖12 海龜機器人外觀設計效果圖
海龜機器人的步態(tài)運動試驗包括直線行走、原地轉(zhuǎn)彎、彎道轉(zhuǎn)彎行走等. 試驗結(jié)果在爬行速度,連續(xù)工作時間、無線操作距離等關(guān)鍵技術(shù)指標都可以達到預期要求. 圖13為機器人舞臺表演實驗. 圖14為基于斜側(cè)向重心調(diào)整的步態(tài)穩(wěn)定性優(yōu)化實驗.
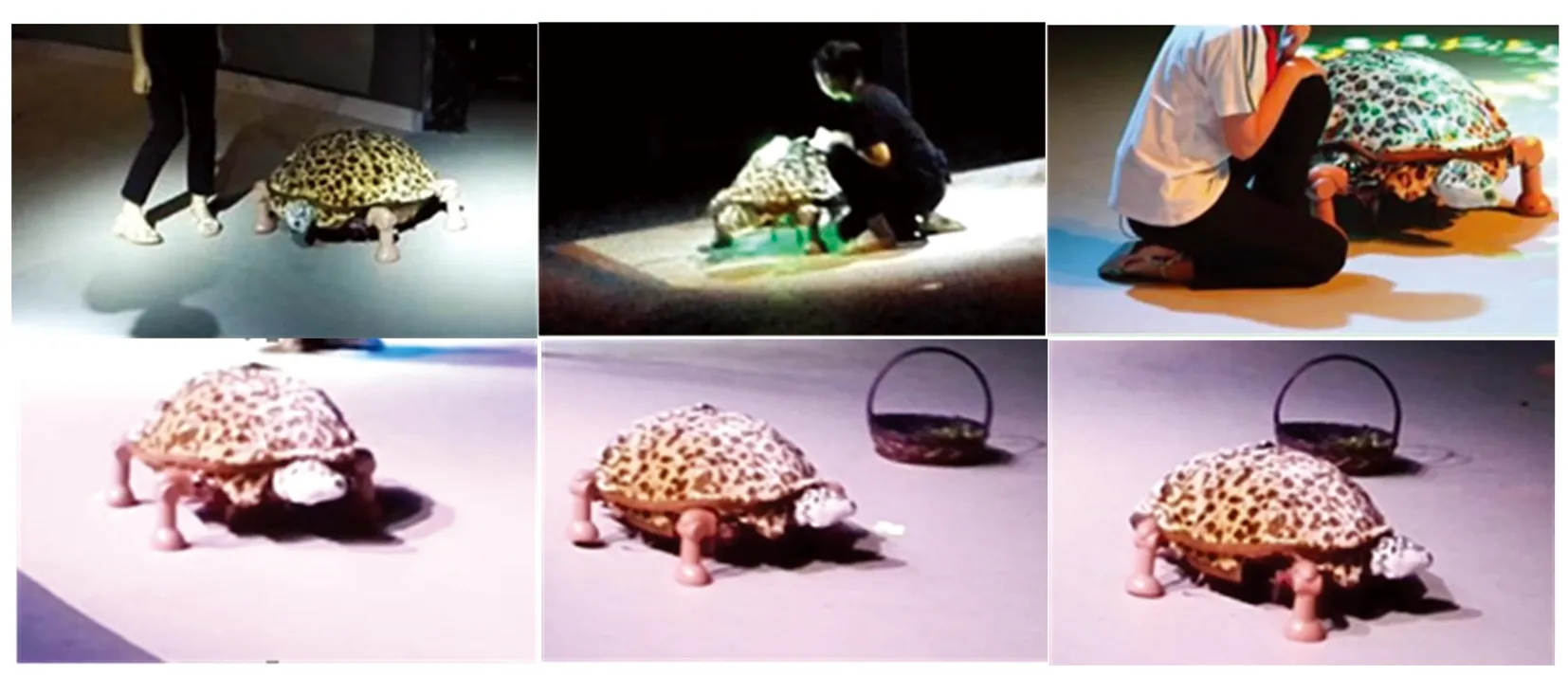
圖13 舞臺表演實驗
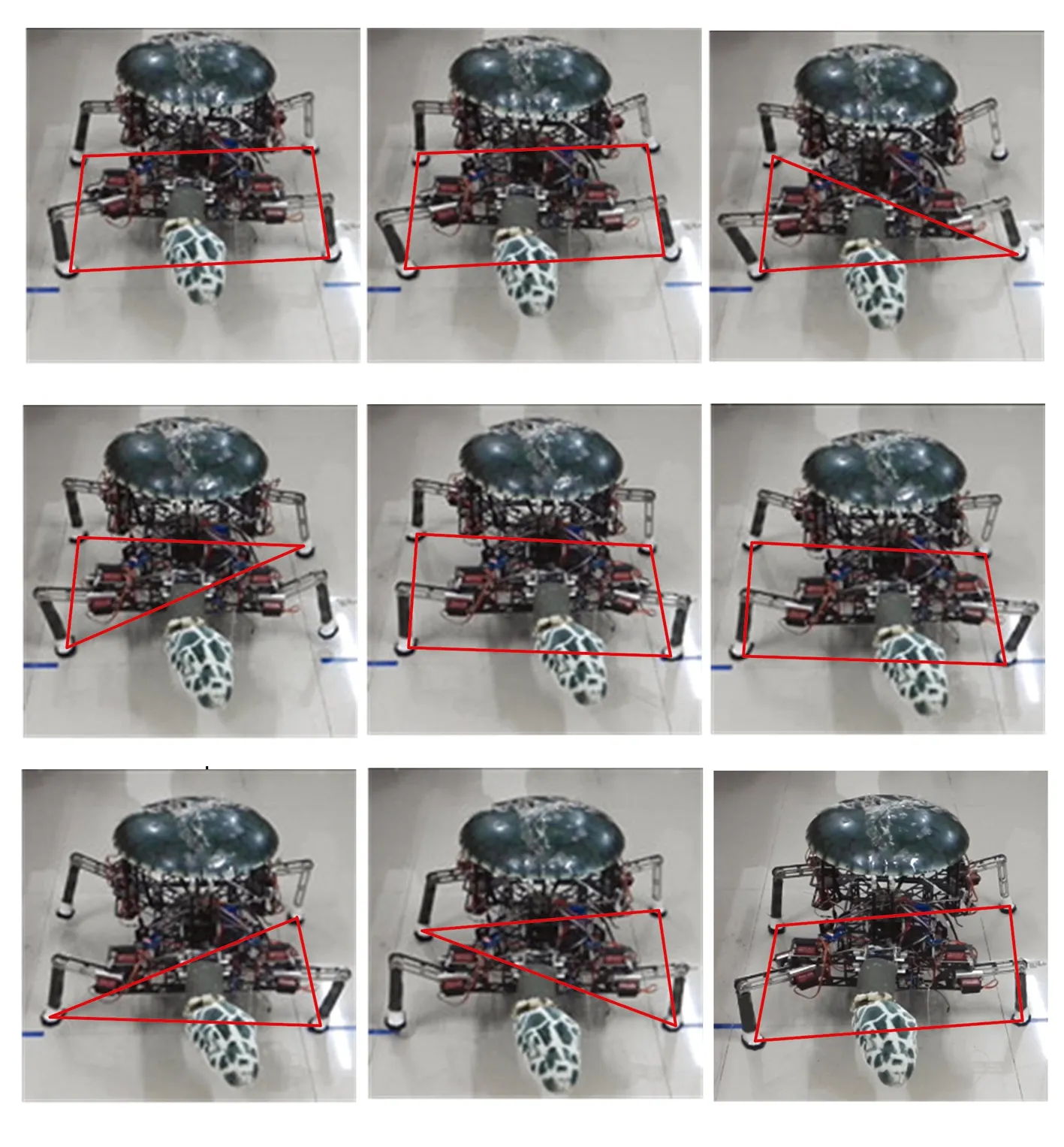
圖14 基于斜側(cè)向重心調(diào)整的步態(tài)實驗
實驗表明,最終海龜機器人實際技術(shù)指標如下:
1)系統(tǒng)質(zhì)量:6 kg;
3)頭-頸部長度:300 mm;
4)爬行速度:0.35 m/s;
5)負載能力(除自重外):2 kg;
6)連續(xù)工作時間:1 h;
7)無線操作距離:100 m.
5 結(jié) 論
1)針對所創(chuàng)作的機器人戲劇,研制了用于表演的海龜機器人系統(tǒng),除了從運動功能上考慮了機械結(jié)構(gòu)和機構(gòu)的設計外,還從藝術(shù)表達的角度考慮了外觀設計、龜殼及柔性脖子的特效設計和人機交互設計等.
2)采用基于斜側(cè)向重心調(diào)整的步態(tài)規(guī)劃方法具有較好的通用性,對于其他四足機器人、六足機器人等的穩(wěn)定步態(tài)規(guī)劃均具有重要的參考價值.
3)機器人版《來到深圳的豆芽菜》已經(jīng)公演,表演效果良好,很受觀眾喜歡.
4)探索并實踐了機器人戲劇這一新的藝術(shù)表達形式,為滿足人們?nèi)找嬖鲩L的精神文明需求提供了一種新的途徑. 可以預見,隨著文化和科技的發(fā)展,機器人戲劇在未來將越來越受到人們的關(guān)注,并逐步走進普通人的生活. 這將對戲劇表演的相關(guān)理論體系產(chǎn)生影響,同時科技與文化的結(jié)合對技術(shù)和藝術(shù)本身都提出了新的要求,將促進科技和文化的創(chuàng)新和發(fā)展.
[1] LIN C Y, TSENG C K, TENG W C, et al. The realization of robot theater: humanoid robots and theatric performance[C]//Proceedings of the International Conference on Advanced Robotics. Munich: IEEE, 2009: 1-6.
[2] KNIGHT H. Eight lessons learned about non-verbal interactions through robot theater[C]//Proceedings of the International Confe-rence on Social Robotics. Amsterdam: DBLP, 2011:42-51. DOI: 10.1007/ 978-3-642-25504-5_5.
[3] MAVRIDIS N, HANSON D. The ibnSina center: an augmented reality theater with intelligent robotic and virtual characters[C]//Proceedings of the IEEE International Symposium on Robot and Human Interactive Communication. Toyama: IEEE, 2009: 681-686. DOI: 10.1109/ ROMAN.2009.5326148.
[4] 樊廣灝, 廖啟征, 魏世民, 等. 一種舞蹈表演機器人的結(jié)構(gòu)設計及運動分析[J]. 機電產(chǎn)品開發(fā)與創(chuàng)新, 2011, 24(6): 7-9. DOI: 10.3969/ j.issn.1002-6673.2011.06.003.
FAN G H, LIAO Q Z, WEI S M, et al. The structural design and kinematic analysis for a dancing robot[J]. Development & Innovation of Machinery & Electrical Products, 2011, 24(6): 7-9. DOI: 10.3969/j.issn.1002-6673.2011.06.003.
[5] SAKAGAMI Y, WATANABE R, AOYAMA C, et al. The intelligent ASIMO: system overview and integration[C]//Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and System. Lausanne: IEEE, 2002: 2478-2483. DOI: 10.1109/IRDS.2002.1041641.
[6] BELLACCINI M, LANARI L, PAOLILLO A, et al. Manual gui-dance of humanoid robots without force sensors:preliminary experiments with NAO[C]//Proceedings of the IEEE International Conference on Robotics and Automation. Hong Kong: IEEE, 2014: 1184-1189. DOI: 10.1109/ICRA.2014.6907003.
[7] OH J H, HANSON D, KIM W S, et al. Design of android type humanoid robot albert HUBO[C]//Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems. Beijing: IEEE, 2006: 1428-1433. DOI: 10.1109/IROS.2006.281935.
[8] LI Y F, LAI C Y. Intelligent algorithm for music playing robot: applied to the anthropomorphic piano robot control[C]//Proceedings of the International Symposium on Industrial Electronic. Istanbul: IEEE, 2014: 1538-1543. DOI: 10.1109/ISIE.2014.6864843.
[9] HUANG H H, Li W H, CHEN Y J, et al. Automatic violin player[C]//Proceedings of the World Congress on Intelligent Control and Automation (WCICA). Beijing: IEEE, 2012: 3892-3897. DOI: 10.1109/WCICA.2012. 6359122.
[10]TAKEDA T, HIRATA Y, KOSUGE K. Dance step estimation method based on HMM for dance partner robot[J]. IEEE Transactions on Industrial Electronics, 2007, 54(2): 699-706. DOI: 10.1109/ TIE.2007.891642.
[11]KAJITA S N T, GOTO M, MATSUSAKE Y. Voca watcher: natural singing motion generator for a humanoid robot[C]//Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems. San Francisco: IEEE, 2011: 2000-2007. DOI: 10.1109/IROS. 2011.6094660.
[12]柯顯信,尚宇峰,盧孔筆. 仿人情感交互表情機器人研究現(xiàn)狀及關(guān)鍵技術(shù)[J]. 智能系統(tǒng)學報, 2013, 8(6): 482-488. DOI: 10.3969/j.issn. 1673-4785.201212018.
KE X X, SHANG Y F, LU K B. Analysis of the present research status and key technology of the humanoid emotion-interactive countenance robot[J]. CAAI Transactions on Intelligent Systems, 2013, 8(6): 482-488. DOI: 10.3969/j.issn.1673-4785. 201212018.
[13]LEE H S, PARK J W, CHUNG M J. A linear affect-expression. space model and control points for mascot-type facial robots[J]. IEEE Transactions on Robotics, 2007, 23(5): 863-873. DOI: 10.1109/TRO.2007.907477.
[14]HIRTH J, SCHMITZ N, BRENS K. Emotional architecture for the humanoid robot head roman[C]//Proceedings of the IEEE International Conference on Robotics and Automation. Rome: IEEE, 2007: 2150-2155. DOI: 10.1109/ ROBOT.2007.363639.
[15]ANGEL JULIAN M F,ANDREA B. Towards an autonomous theatrical robot[C]//Proceedings of the Humaine Association Conference on Affective Computing and Intelligent Interaction. Geneva: IEEE Computer Society, 2013: 689-694. DOI: 10.1109/ACII.2013.120.
[16]張煒. 機器人戲劇[J]. 機器人技術(shù)與應用, 2011(5): 19-22. DOI: 10.3969/j.issn.1004-6437. 2011.05.005.
ZHANG W. Robot Drama[J]. Robot technique and application, 2011(5): 19-22. DOI: 10.3969/ j.issn.1004-6437.2011.05.005.
[17]周自維,李長樂,趙杰,等. 復雜局部地形中的實時路徑規(guī)劃算法設計[J]. 哈爾濱工業(yè)大學學報, 2014, 46(8): 65-71. DOI: 10.11918/j.issn. 0367-6234.2014.08.011.
ZHOU Z W, LI C L, ZHAO J, et al. A real time path planning algorithm based on local complicated environment[J]. Journal of Harbin Institute of Technology, 2014, 46(8): 65-71. DOI: 10.11918/j.issn.0367-6234.2014.08. 011.
[18]王國富,高峰,羅楊宇,等. 轉(zhuǎn)向盤式六足機器人設計及全方位運動控制[J]. 哈爾濱工業(yè)大學學報, 2012, 44(12): 129-134. DOI: 10.11918/ j.issn.0367-6234.2012.12.023.
WANG G F, GAO F, LUO Y Y, et al. Design and omnidirectional motion control of hexapod robot with a steering-wheel[J]. Journal of Harbin Institute of Technology, 2012, 44(12): 129-134. DOI: 10.11918/j.issn.0367-6234. 2012.12.023.
[19]侯月陽,吳偉國,高力揚. 有撓性驅(qū)動單元的雙足機器人研制與步行實驗[J]. 哈爾濱工業(yè)大學學報, 2015, 47(1): 26-32. DOI: 10.11918/ j.issn.0367-6234.2015.01.005.
HOU Y Y, WU W G, GAO L Y. Development and walking Experiments for biped robot with flexible driven units[J]. Journal of Harbin Institute of Technology, 2015, 47(1): 26-32. DOI: 10.11918/j.issn.0367-6234. 2015.01.005.
[20]張銘鈞,劉曉白,徐建安,等. 海龜柔性前肢仿生推進研究[J]. 機器人, 2011, 33(2): 229-236. DOI: 10.3725/SPJ.1218.2011.00229.
ZAHNG M J, LIU X B, XU J A. Bionic research on turtle’s flexible forelimb propulsion[J]. Robot, 2011, 33(2): 229-236. DOI: 10.3725/SPJ.1218.2011.00229.
[21]NA B, CHOI H, KONG K. Design of a direct-driven linear actuator for a high-speed quadruped robot, Cheetaroid-I[J]. IEEE/ASME Transactions on Mechatronics, 2015, 20(2): 924-933. DOI: 10.1109/TMECH.2014.2326696.
[22]黃亮. 面向舞臺表演的海龜機器人及其多足穩(wěn)定步態(tài)規(guī)劃研究[D]. 哈爾濱:哈爾濱工業(yè)大學, 2016.
HUANG L. Research on multi-leg stable gait planning of a turtle robot for stage performance[D]. Harbin: Harbin Institute of Technology, 2015.
(編輯 楊 波)
Development of a turtle robot for performance at digital stage
HUANG Liang1,2, GUAN Guisen1,2, XU Wenfu1,2, LIANG Guowei1,2
(1. Shenzhen Graduate School, Harbin Institute of Technology, Shenzhen 518055, Guangdong, China;2.Shenzhen Engineering Laboratory of Performance Robots at Digital Stage, Shenzhen 518055, Guangdong, China)
According to the created robot theatre script, a big turtle robotic system was developed for performance at digital stage. This robot includes mechanics system and control system, and the mechanics system is composed of four 3-DOF modularized light weight legs a flexible neck with continuous curvature, a shell opening and closing device and a carbon fiber torso frame. All the mechanotronics devices, including motors, circuit board et al, are installed in the main body. Through the synchronous belt, the motion of the motor is transferred to the outer end, largely reducing the size and weight of the cantilever, then reducing the load of the motor. The control system consists of a PC and an embedded controller, respectively provides the functions of human-computer interaction at high level and the realtime control of each joint at low level. According to the requirement of performance at the stage, a COG self-adjusting gait planning method was presented, assuring the stability during the movement of multiple legs. Finally, the robotic prototype was developed which had beautiful appearance. After the verification based on certain experiments, the robot was used to conduct a number of public performances. The results showed that the developed robot perfectly played the role of the drama performance and provoked audience to love it.
robot theater; performing robot; bionic turtle robot; gait planning; digital stage
10.11918/j.issn.0367-6234.201603124
2016-03-25
國家自然科學基金(61573116);深圳市文化創(chuàng)意產(chǎn)業(yè)發(fā)展專項資金(深發(fā)改[2014]1507號);深圳市基礎研究計劃(JCYJ20140417172417095,JCYJ 20150529141408781)
黃 亮(1993—),男,碩士研究生; 徐文福(1979—),男,副教授,博士生導師
徐文福, wfxu@hit.edu.cn
TP24
A
0367-6234(2017)07-0020-07