負載不確定的柔性機械臂自適應自抗擾控制
2017-07-10 10:26:57劉延芳
哈爾濱工業大學學報 2017年7期
劉延芳, 劉 宏, 孟 瑤
(1. 機器人系統與技術國家重點實驗室(哈爾濱工業大學), 哈爾濱 150001;2. 哈爾濱工業大學 航天工程系, 哈爾濱 150001;3. 上海宇航系統工程研究所,上海 201109)
負載不確定的柔性機械臂自適應自抗擾控制
劉延芳1,2, 劉 宏1, 孟 瑤3
(1. 機器人系統與技術國家重點實驗室(哈爾濱工業大學), 哈爾濱 150001;2. 哈爾濱工業大學 航天工程系, 哈爾濱 150001;3. 上海宇航系統工程研究所,上海 201109)
為解決末端具有不確定負載的柔性機械臂的位置控制問題,設計了自適應自抗擾控制器. 采用奇異攝動理論將多柔性連桿機械臂動力學系統分解為快時標和慢時標兩個子系統. 針對快時標子系統設計線性二次型控制器,用于快速抑制柔性連桿的振動,將快時標狀態變量轉移到慢流形上;針對慢時標子系統,設計自抗擾控制器,用于跟蹤期望角度. 針對末端負載的不確定性,采用迭代最小二乘算法估計末端負載的質量,并在自抗擾控制器中進行補償. 結果表明:末端負載的不確定量達到預估負載質量的200%時,在15 rad/s范圍內,角度控制的均方差0.08 rad,明顯優于不對末端負載進行補償的情況. 在末端負載和機械臂運動速度都發生變化時,所提出的自適應自抗擾控制器具有一定的魯棒性.
多柔性連桿機械臂;自抗擾控制;負載不確定性;自適應控制;迭代最小二乘算法
多柔性連桿機械臂(multiple-flexible-link manipulator, MFLM)由于具有質量輕、慣量低等優點,在未來空間站建設、空間操控和在軌服務等任務中擔任著重要的角色[1-4],同時也是實現裝備制造等產業智能化的重要設備[5-6]. 然而,機械臂運動過程中,臂桿的柔性導致振動,影響定位精度;剛體運動與結構振動高度耦合,呈現出強非線性;關節驅動力矩需要同時實現關節轉動和振動控制,屬于欠驅動系統;負載隨著任務不同而不同,存在不確定性. 本文針對采用柔性臂桿的機械臂的角度運動和振動抑制的控制器設計問題開展研究.
內外環的控制器設計是柔性機械臂常用的控制器設計方法. 內環通過臂桿彎曲反饋消除其振動,外環采用角度反饋跟蹤期望軌跡. 比例微分(proportional derivative, PD)、比例微分積分(proportional integral derivative,PID)、自適應算法、積分阻抗技術、廣義比例積分等被廣泛用于內環和外環的控制器設計[7-9];基因學習算法[10]、逆模型控制[11]、力控制[12]、采用壓電元件的主動振動控制[13]、H控制[14]等也都在MFLM的控制上得到了一定的應用. 由于結構振動相對于關節的剛體轉動要快很多,采用奇異攝動理論將整個復雜系統分解為快時標和慢時標兩個相對簡單的子系統,在柔性關節[15-18]、柔性臂桿[19-21]等機械臂的控制中得到了應用. 考慮到很難獲得MFLM的精確動力學模型,自抗擾控制(active disturbance rejection control,ADRC)[21-23]通過擴張狀態觀測器(extended state observer,ESO)擴展一個狀態實現對內部和外部干擾的估計和補償,采用反饋控制器實現一定的魯棒性能. ADRC通過質量矩陣可以實現系統的自解耦. 但是,末端負載的不確定性導致質量矩陣的不確定,引起ADRC的性能下降. 頻域辨識和模態濾波器廣泛用來解決柔性連桿機械臂末端負載的不確定性[24-26].
本文在對MFLM系統進行時標分解的基礎上,內環快時標子系統采用線性二次型(linear quadratic regulator,LQR)控制器,實現振動的快速抑制;外環慢時標子系統設計了ADRC控制器,同時采用迭代最小二乘(recursive least-squares,RLS)算法實現對末端負載的估計和補償.
1 系統建模
如圖1所示,MFLM具有n個柔性連桿、n個關節和1個末端負載. 臂桿i的長度為li,密度為ρi,剛度為EIi;關節i的驅動力矩為τi,角位置記作θi. 關節認為是集中質量,轉動慣量等效到臂桿上,末端負載的質量為mi. 采用Euler-Lagrange方法和假設模態法[21,25],得到MFLM的動力學模型為

(1)

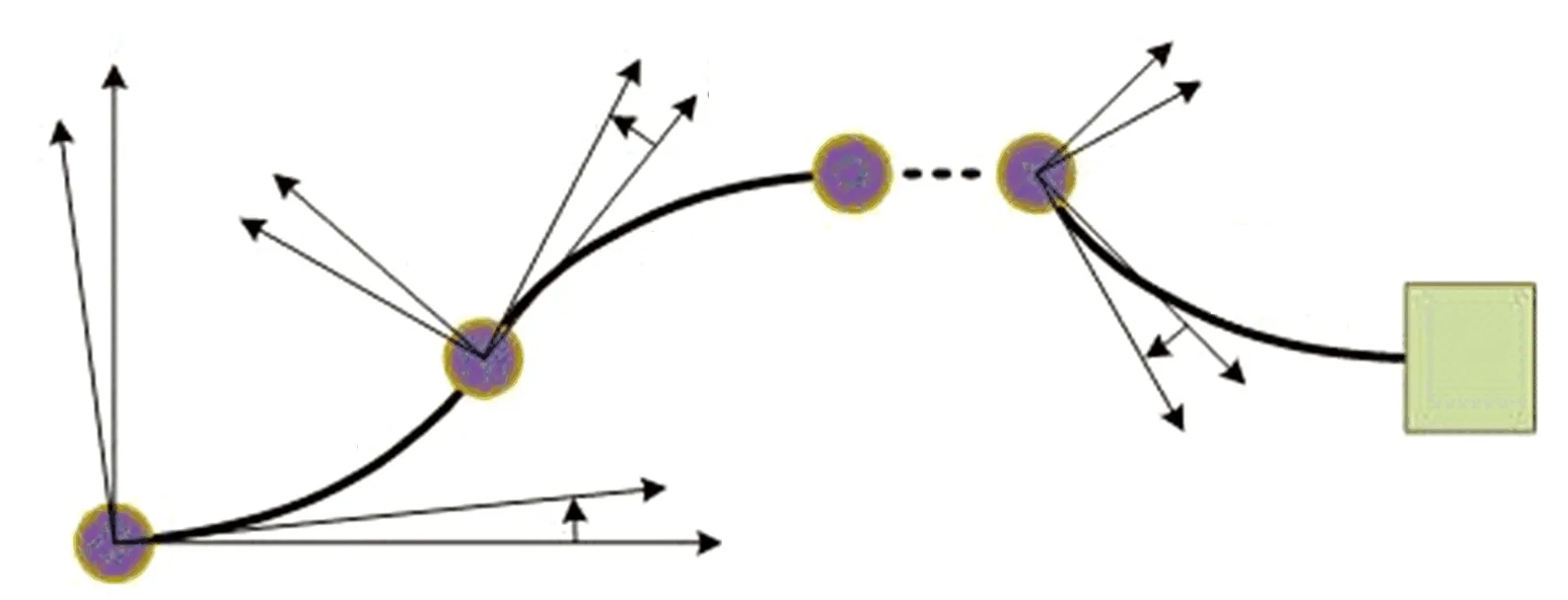
圖1 MFLM示意

式(1)可以進一步表示為

選擇攝動參數為

(2)
將μ=0代入并整理,得到慢時標子系統為
(3)
下標‘s’表示慢時標子系統的物理量.
在獲得快時標系統時,認為慢時標系統的物理量為常量,定義快時標子系統變量為zf:=z-zs,控制量為τf:=τ-τs,式(2)中快時標子系統可以寫為
其中σ=t/μ為快時標標度.
2 控制器設計
圖2給出了控制器結構示意圖,控制力矩為
τ=τs+τf.
其中,慢時標控制量τs通過ADRC控制器給出,快時標控制量τf通過LQR控制器給出,末端負載的質量通過RLS算法估計并反饋至ADRC控制器.
2.1 末端負載的估計
考慮到末段負載的不確定性,將質量矩陣重新表達為兩部分
M(θ,q)=M0(θ,q)+CM(θ,q)mn.
(4)

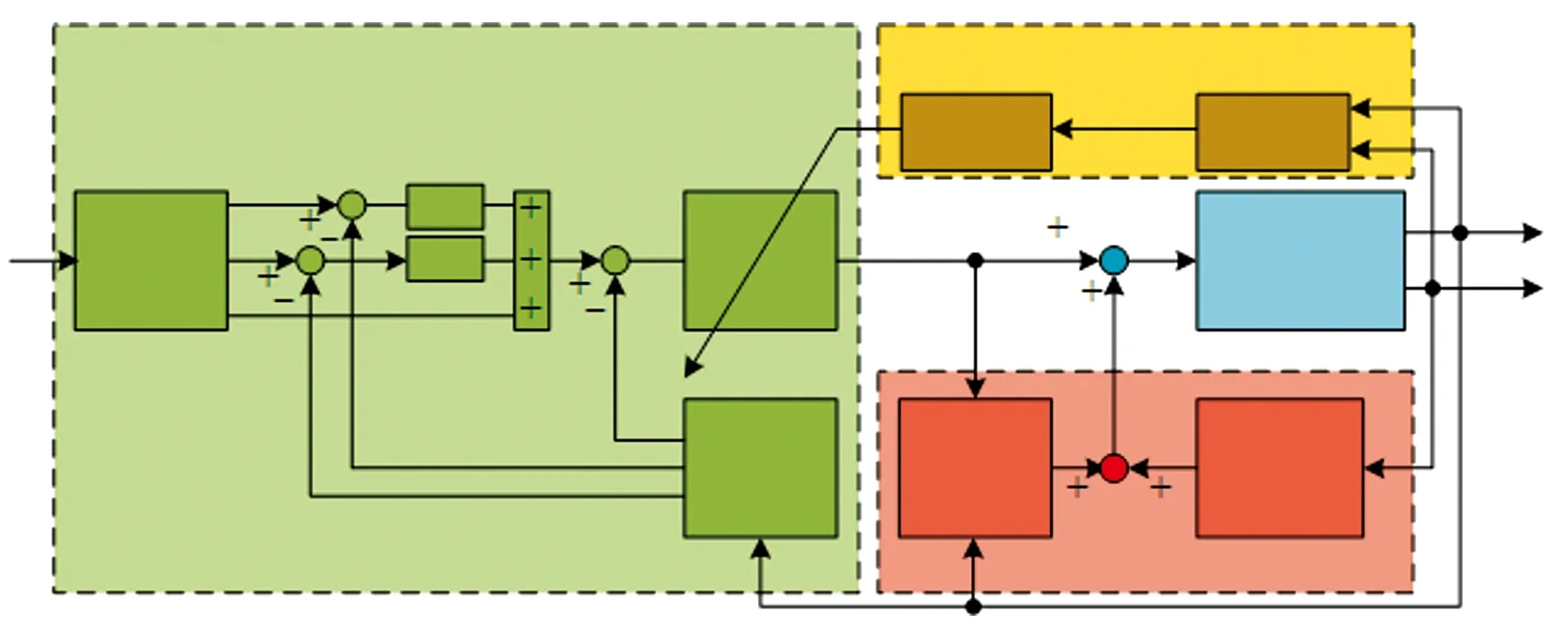
圖2 控制器結構示意圖(DL: 解耦器, BLC: 邊界層修正)
將式4)-5)帶入到式(1)中可得
ΦTmn=η,
其中:

考慮到在某些情況下,Φ≈0,同時為了充分利用舊數據信息,采用迭代最小二乘算法估計負載質量

在應用中,角度信息可以通過編碼器測得,臂桿彎曲信息可以通過應變片測量,對于角度的導數和各階模態坐標需要通過估計得到. 這里采用跟蹤微分器(tracking differentiator, TD):
式中:x1、x2是狀態變量,u是控制輸入,h0和r分別是濾波因子和速度因子,fh(x1,x2,r,h0)定義如下:
2.2 外環自抗擾控制器
慢時標子系統(3)可以表達為
(6)
其中

表示總的干擾,包含內部不確定性和外部干擾;
(7)
選擇虛擬控制為
).
λ(s)=s2+m+βi1s2+m-1+…+βi(2+m-1)s+βi(2+m)=(s+ω0)2+m,
由此可以得到所有的增益系數.
式中,epi=θdi-θi. 因此,設計kpi和kdi,使上述系統穩定且有期望的響應.
fal(x,α,δ)=
得到控制器為


2.3 內環LQR控制器
將快時標子系統表達為狀態空間的形式為

其中
采用最優控制技術進行振動抑制,目標函數選擇為
式中Qf和Rf為權重系數矩陣. 采用標準的LQR設計,快時標系統的控制輸出為
其中:

3 仿真研究
3.1 仿真參數
在仿真算例中,考慮具有兩節柔性臂桿的機械臂,每節臂桿考慮兩階模態,相應的參數見表1. 仿真采用Simulink,通過四階Runge-Kutta法求解,仿真步長0.000 5 s.

表1 仿真參數

Qf=diag(100,10,10,10,10,10,10,10),
Rf=diag(100,10).
機械臂的運動軌跡設計為
其中ai和ωi為期望的最終角位置和轉動速度.
3.2 末端負載的估計性能
RLS參數設置為P0=2 000和mp0=m2,其中m2是預估負載質量. 真實的負載質量為8.25 kg,因此,負載的不確定量為ΔMp=2m2=5.5 kg. 末端負載估計器的性能如圖3所示.
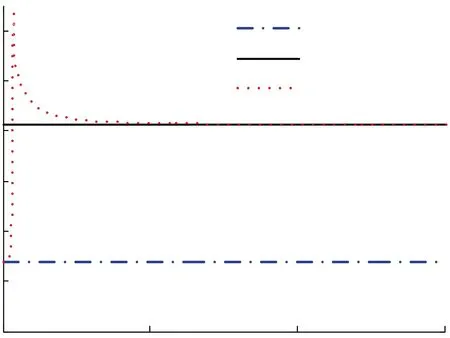
圖3 對末端負載的估計性能
其中黑色實線表示真實的負載質量,藍色點劃線表示預估負載質量,紅色點線為負載估計器估計得到的負載質量. 從圖3中可以看出,負載估計器以預估負載質量作為估計初值,當負載不確定量較大時,初始誤差比較大,但估計值會向負載真值方向迅速變化,出現短暫的超調,并快速收斂到真值,收斂到5%誤差的時間<0.2 s. 出現較大超調的主要原因是:運動初始階段,關節轉動的角度和角速度、臂桿振動的模態坐標值都很小,Φ≈0,對負載質量的估計近似奇異,誤差較大. 通常,為了避免激起臂桿的振動,機械臂操縱負載機動的過程很緩慢,因此,可以認為負載估計收斂速度足夠快.
3.3 小末端負載不確定時的性能
當末端負載的不確定性比較小時,如ΔMp=0.2m2=0.55 kg,系統的響應如圖4所示. 其中,設計軌跡參數為ω1=ω2=1 rad/s、a1=π/3 rad、a2=π/4 rad. 為了方便,AADRC和ADRC分別表示ADRC控制器中采用和沒采用RSL算法估計負載質量并進行補償. 作為對比,仿真中同時給出文獻[15]中的計算力矩控制器(Computed torque controller, CTC)的響應. 從圖4中可以看出,如果負載的不確定性比較小,AADRC和ADRC的性能基本一致. 這主要是由于ADRC控制器本身就有一定的干擾抑制能力. 采用CTC時,θ1和θ2都出現了明顯的超調,且穩定時間較長.

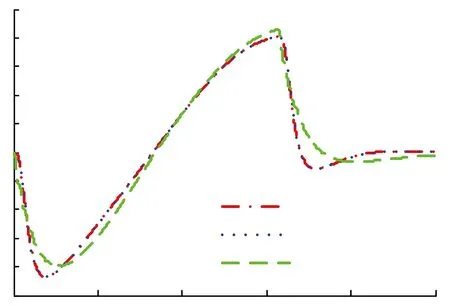
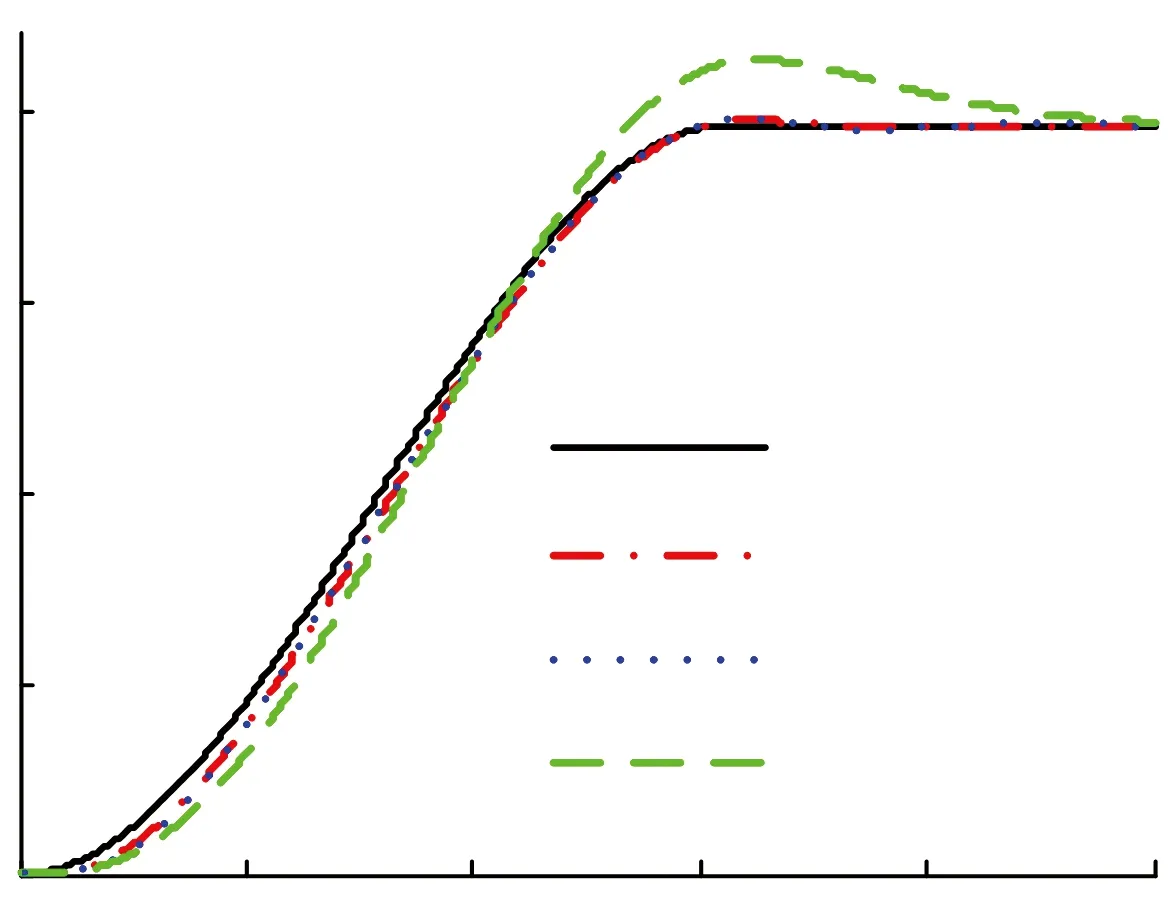
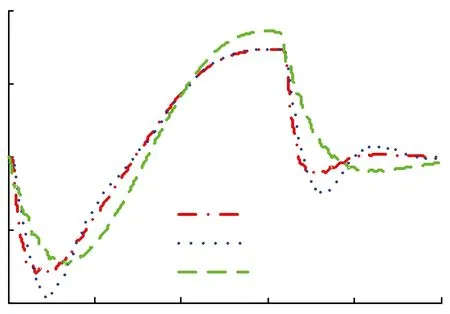
圖4 角度跟蹤響應(ω1=ω2=1 rad/s,ΔMp=0.55 kg)
當機械臂的運動速度增加時,如ω1=ω2=5 rad/s,第1節連桿的響應基本一致,而第2節連桿的響應卻明顯不同. 從圖5中可以看到,采用ADRC時,θ2的超調量大于采用AADRC的,振動衰減的速度也比較慢. 進一步比較圖4和圖5,機械臂運動速度的增加也導致了角度的超調量的增加. 采用CTC時,θ1和θ2的超調也隨著角速度增加而增加.
3.4 大末端負載不確定時的性能
當末端負載不確定量增加時,如ΔMp=5.5 kg,系統的響應如圖6所示. 即使是在機械臂低速運動時(ω1=ω2=1 rad/s),第2節臂桿的響應也明顯不同. 在對末端負載進行估計和補償后,θ2迅速趨于穩定. 如果只采用ADRC,則θ2存在明顯的振蕩. 但是,末端負載不確定性的增加對第1節臂桿的影響很小. 負載不確定性的增加也導致CTC的性能惡化,特別是θ2,超調量達到了30%.
如果機械臂的運動速度增加,單獨采用ADRC的響應性能更加惡化,如圖7所示. 比較圖6和圖7,采用ADRC控制,在負載不確定增加時,隨著機械臂運動速度的增加,θ1的響應也明顯的不同. 如果負載質量不確定性得到補償,機械臂速度增加對系統性能沒有明顯影響. 采用CTC時,θ2的響應性能也進一步惡化,然而θ1并沒有出現超調,但相比于其他兩個控制器,有一定的滯后,這說明在這樣的參數下,關節1的控制器構成了欠阻尼系統.
3.5 不同速度下系統響應分析
其中,tf是仿真時長,N是采樣數量. 從圖中可以看出,無論采用AADRC、ADRC,還是CTC,θ1和θ2的均方差都隨ω增加而增加. 這主要是由于隨著運動速度的增加,超調量也增加. 采用ADRC,θ1的均方差隨著負載不確定性的增加并不明顯,θ2的均方差變化顯著,特別是運動速度較大時. 采用CTC時,在負載質量不確定度較小時,θ1的均方差比采用ADCRC和AADRC時大,但隨著負載不確定性的增加而減小,在負載不確定性較大時,其性能優于ARDC,但不如AADRC;θ2的均方差隨著負載不確定性的增加迅速增加,增速比ADRC略緩. 總體看來,在負載質量得到估計和補償,即采用AADRC時,系統響應對負載的變化和速度變化具有魯棒性.


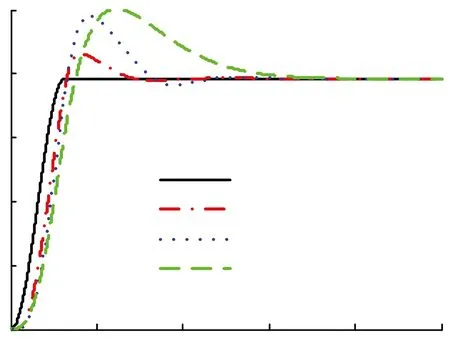
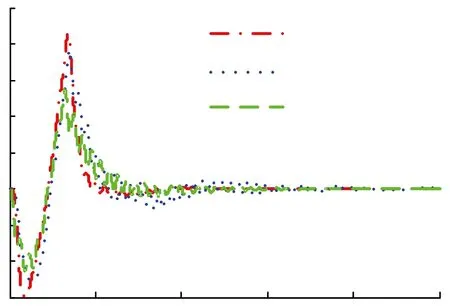
圖5 角度跟蹤響應(ω1=ω2=5 rad/s,ΔMp=0.55 kg)
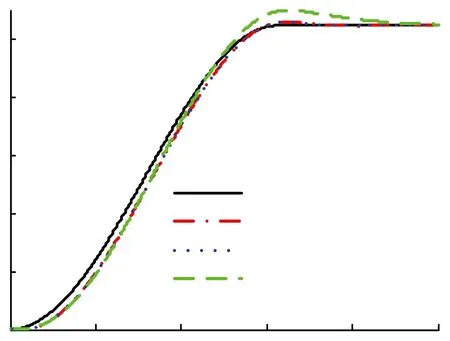
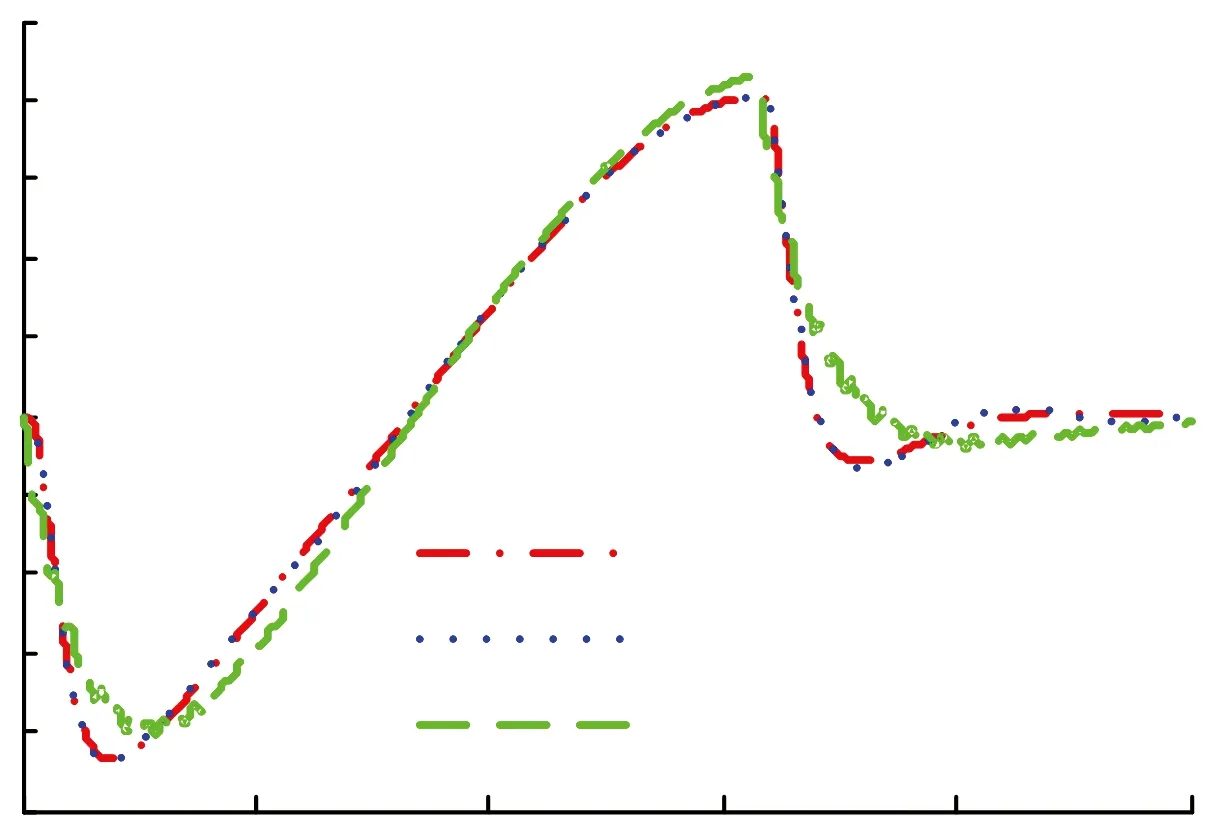
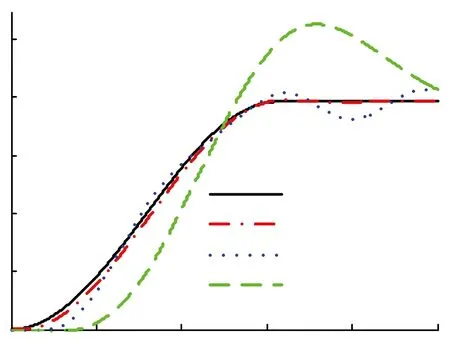
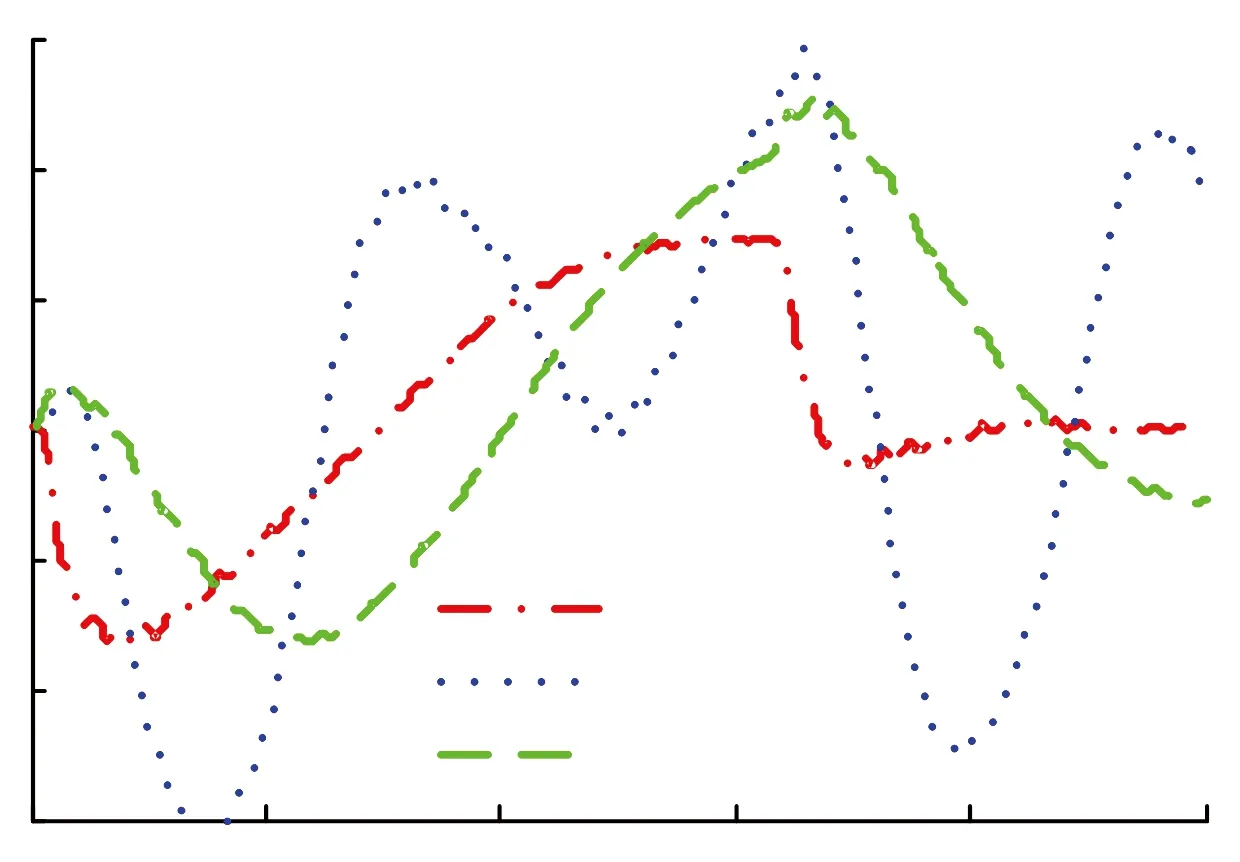
圖6 角度跟蹤響應(ω1=ω2=1 rad/s,ΔMp=5.5 kg)
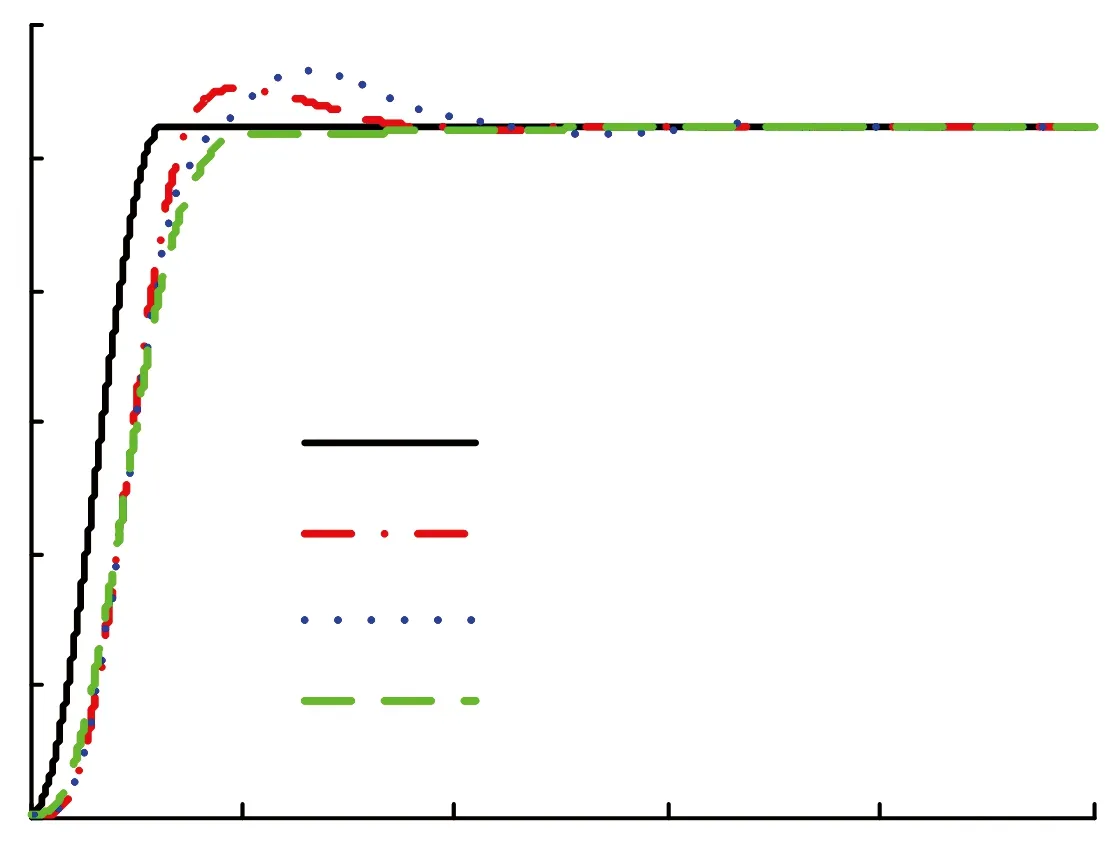
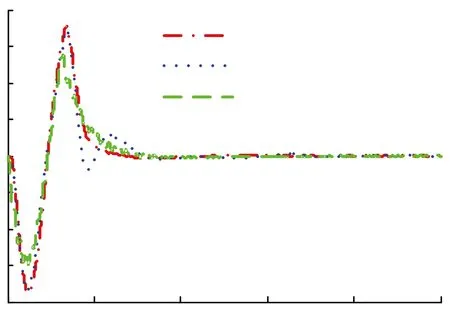
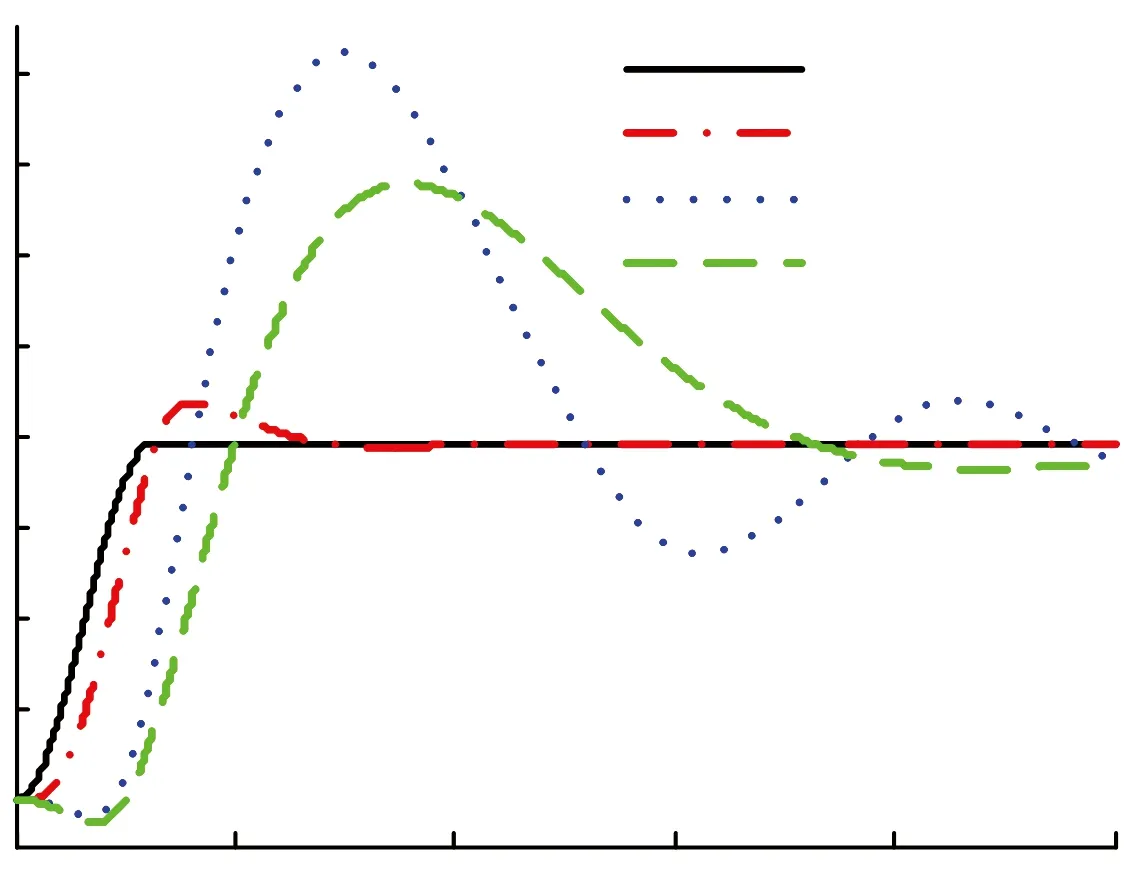
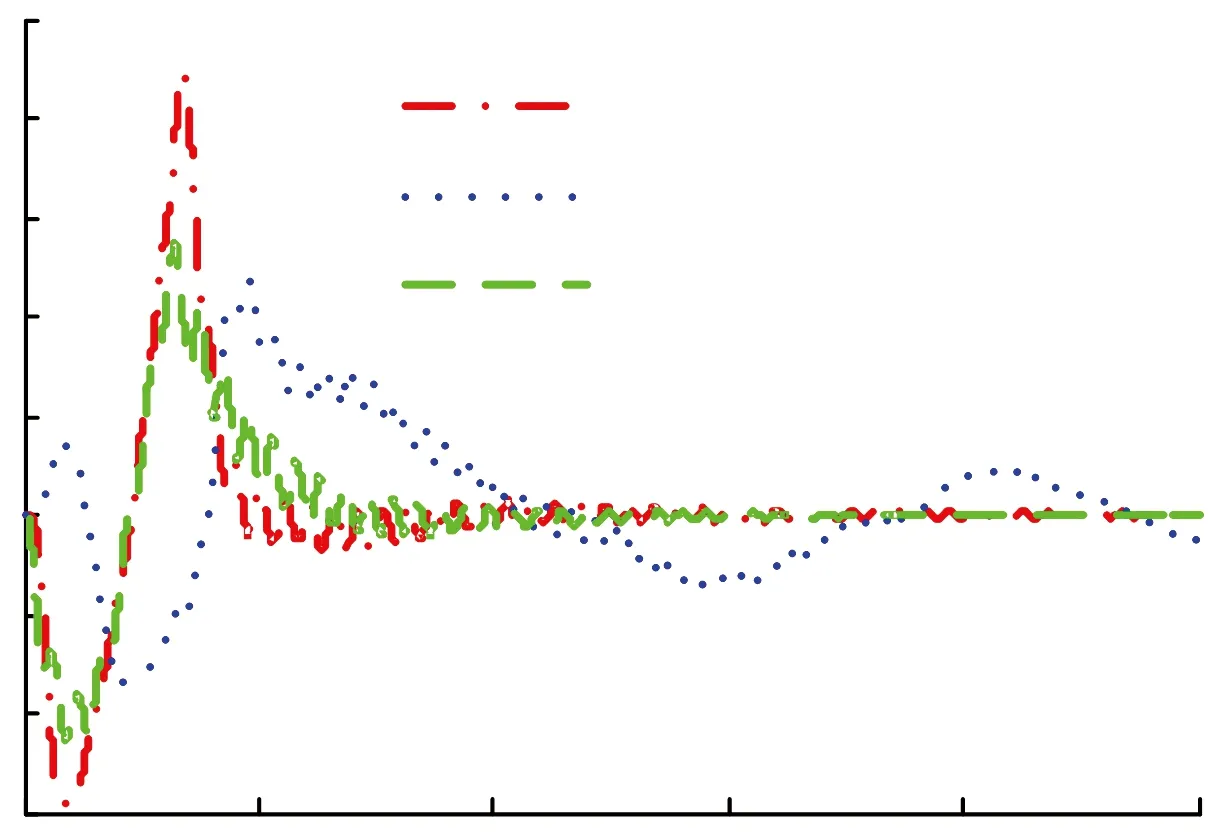
圖7 角度跟蹤響應(ω1=ω2=5 rad/s,ΔMp=5.5kg)
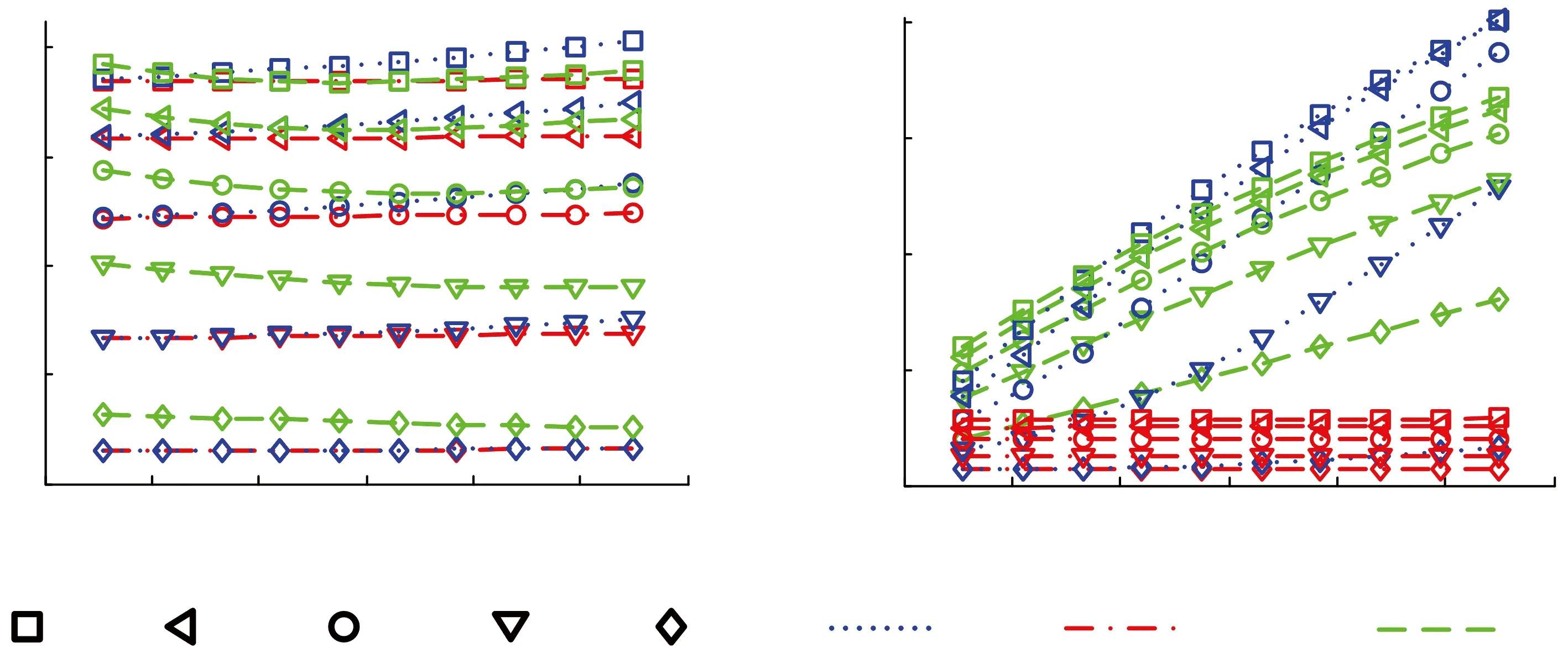
圖8 不同速度下的跟蹤響應
4 結 論
1)針對多柔性臂桿機械臂的控制問題,本文提出了一種新的控制器結構. 首先采用奇異攝動理論將系統分解為快時標和慢時標兩個子系統. 慢時標子系統采用自適應自抗擾控制,快時標子系統采用線性二次型控制器.
2)自適應自抗擾控制器采用微分跟蹤器獲得期望角度的角速度和角加速度,采用狀態擴張估計器獲得估計真實的角速度和角加速度及干擾,采用迭代最小二乘算法估計負載的不確定性,采用非線性比例微分控制器保證系統的魯棒性.
3)仿真結果表明,無論采用AADRC,還是采用ADRC,末端負載的不確定性對臂桿振動和關節轉動的控制精度的影響隨關節轉動速度的增加而變得更加明顯. 關節2的轉動角度控制精度和臂桿2的振動受末端負載的不確定性的影響比關節1和臂桿1更為明顯.
4)采用迭代最小二乘算法估計負載的不確定性并進行補償后,AADRC相比于ADRC,對末端負載不確定性的變化和關節轉動速度的變化都具有更好的魯棒性.
[1] 賀亮, 王有峰, 吳蕊,等. 空間機器人多臂精準協同控制技術[J]. 哈爾濱工業大學學報, 2013, 45(9):107-112.
HE Liang, WANG Youfeng, WU Rui, et al. Precision synergy control technology for multi-arm space robots[J]. Journal of Harbin Institute of Technology, 2013, 45(9): 107-112.
[2] 居鶴華, 冷舒. 利用虛擬傳感器的巡視器機械臂碰撞檢測算法[J]. 哈爾濱工業大學學報, 2016, 48(1): 58-65.
Jü Hehua, LENG Shu. A collide detection algorithm based on virtual sensors of lunar rover manipulator[J]. Journal of Harbin Institute of Technology, 2016, 48(1): 58-65.
[3] CORNELIA A, JOHN D, THOMAS C J. Flexible multi-body dynamic modeling of a Tendon-Actuated Lightweight In-Space MANipulator (TALISMAN)[C]// AIAA SPACE 2015 Conference and Exposition. Pasadena: AIAA Press, 2015: AIAA 2015-4629. DOI: 10.2514/6.2015-4629.
[4] JARZEBOWSKA E, PIETRAK K. Constrained mechanical systems modeling and control: a free-floating space manipulator case as a multi-constrained system[J]. Robotics & Autonomous Systems, 2014, 62(10):1353-1360. DOI: 10.1016/j.robot.2014.04.004.
[5] 劉伊威, 王濱, 姚郁,等. 乒乓球機器人手臂及其擊球策略[J]. 哈爾濱工業大學學報, 2013, 45(3):33-38.
LIU Yiwei, WANG Bin, YAO Yu, et al. Dexterous robot arm for table tennis and hitting strategy[J]. Journal of Harbin Institute of Technology, 2013, 45(3): 33-38.
[6] 閆繼宏, 郭鑫, 劉玉斌,等. 一種模塊化機械臂的設計與運動學分析[J]. 哈爾濱工業大學學報, 2015, 47(1):20-25.
YAN Jihong, GUO Xin, LIU Yubin, et al. The design and kinematic analysis of a modular manipulator[J]. Journal of Harbin Institute of Technology, 2015, 47(1): 20-25.
[7] TSO S, YANG T, XU W, et al. Vibration control for a flexible-link robot arm with deflection feedback[J]. International Journal of Non-Linear Mechanics, 2003, 38(1): 51-62. DOI:10.1016/S0020-7462(01)00040-3.
[8] PEREIRA E, APHALE S S, FELIU V, et al. Integral resonant control for vibration damping and precise tip-positioning of a single-link flexible manipulator[J]. IEEE/ASME Transactions on Mechatronics, 2011, 16(2): 232-240. DOI: 10.1109/TMECH.2009.2039713.
[9] MORALES R, FELIU V, JARAMILLO V. Position control of very lightweight single-link flexible arms with large payload variations by using disturbance observers[J]. Robotics and Autonomous Systems, 2012, 60 (4): 532-547. DOI:10.1016/j.robot.2011.11.016.
[10]SHARMA K S, SUTTON R, TOKHI O M. Local model and controller network design for a single-link flexible manipulator[J]. Journal of Intelligent & Robotic Systems, 2014, 74(3/4): 605-623. DOI: 10.1007/s10846-013-9847-1.
[11]VAKIL M, FOTOUHI R, NIKIFORUK P. Causal end-effector inversion of a flexible link manipulator[J] Mechatronics, 2009, 19 (7): 1197-1210. DOI:10.1016/j.mechatronics.2009.03.010.
[12]PAYO I, FELIU V, CORTAZAR D O. Force control of a very lightweight single-link flexible arm based on coupling torque feedback[J]. Mechatronics, 2009, 19 (3): 334-347. DOI:10.1016/j.mechatronics.2008.10.003.
[13]GURSES K, BUCKHAM B J, PARK E J. Vibration control of a single-link flexible manipulator using an array of fiber optic curvature sensors and PZT actuators[J]. Mechatronics, 2009, 19 (2): 167-177. DOI:10.1016/j.mechatronics.2008.09.005.
[14]PARK H W, YANG H S, PARK Y P, et al. Position and vibration control of a flexible robot manipulator using hybrid controller[J]. Robotics and Autonomous Systems, 1999, 28 (1): 31-41. DOI:10.1016/S0921-8890(99)00027-5.
[15]SUBUDHI B, MORRIS A S. Singular perturbation approach to tra-jectory tracking of flexible robot with joint elasticity[J]. International Journal of Systems Science, 2003, 34(3): 167-179. DOI:10.1080/0020772031000135450.
[16] KHORASANI K. Adaptive control of flexible-joint robots[J]. IEEE Transactions on Robotics and Automation, 1992, 8 (2): 250-267. DOI: 10.1109/70.134278.
[17]SPONG M, KHORASANI K, KOKOTOVIC P. An integral manifold approach to the feedback control of flexible joint robots[J]. IEEE Journal of Robotics and Automation, 1987, 3 (4): 291-300. DOI: 10.1109/JRA.1987.1087102.
[18]GHORBEL F, SPONG M. Integral manifolds of singularly perturbed systems with application to rigid-link flexible-joint multibody systems[J] International Journal of Non-Linear Mechanics, 2000, 35 (1): 133-155. DOI:10.1016/S0020-7462(98)00092-4.
[19]VAKIL M, FOTOUHI R, NIKIFORUK P. Maneuver control of the multilink flexible manipulators[J]. International Journal of Non-Linear Mechanics, 2009, 44 (8): 831-844. DOI:10.1016/j.ijnonlinmec.2009.05.008.
[20]SICILIANO B, PRASAD J, CALISE A. Output feedback two-time scale control of multilink flexible arms[J]. Journal of Dynamic Systems, Measurement, and Control, 1992, 114 (1): 70-77. DOI:10.1115/1.2896509.
[21]SUBUDHI B, MORRIS A. Dynamic modelling, simulation and control of a manipulator with flexible links and joints[J]. Robotics and Autonomous Systems, 2002, 41 (4): 257-270. DOI:10.1016/S0921-8890(02)00295-6.
[22]PRZYBYLA M, KORDASZ M, MADONSKI R, et al. Active disturbance rejection control of a 2d of manipulator with significant modeling uncertainty[J]. Bulletin of the Polish Academy of Sciences Technical Sciences, 2012, 60 (3): 509-520. DOI: 10.2478/v10175-012-0064-z.
[23]BECEDAS J, TRAPERO J, FELIU V, et al. Adaptive controller for single-link flexible manipulators based on algebraic identification and generalized proportional integral control[J]. IEEE Transactions on Systems, Man, and Cybernetics, Part B: Cybernetics, 2009, 39 (3): 735-751. DOI: 10.1109/TSMCB.2008.2008905.
[24]CHU Zhongyi, CUI Jing, SUN Fuchun. Fuzzy adaptive distur-bance-observer-based robust tracking control of electrically driven free-floating space manipulator[J]. IEEE Systems Journal, 2014, 8(2):343-352. DOI: 10.1109/JSYST.2012.2220171.
[25]CAI Guoping, LIM C. Optimal tracking control of a flexible hub-beam system with time delay[J]. Multibody System Dynamics, 2006, 16 (4): 331-350. DOI: 10.1007/s11044-006-9029-z.
[26]DWIVEDY S, EBERHARD P. Dynamic analysis of flexible manipulators, a literature review[J]. Mechanism and Machine Theory, 2006, 41 (7): 749-777. DOI:10.1016/j.mechmachtheory.2006.01.014.
(編輯 楊 波)
Adaptive active disturbance rejection control of flexible manipulators with uncertain payload
LIU Yanfang1,2, LIU Hong, MENG Yao3
(1. State Key Laboratory of Robotics and System (Harbin Institute of Technology), Harbin 150001, China;2. Dept.of Aerospace Engineering, Harbin Institute of Technology, Harbin 150001, China;3. Aerospace System Engineering Shanghai, Shanghai 201109, China)
An adaptive active disturbance rejection control is proposed for flexible manipulators with uncertain payload. The two-time scale model of the multiple-flexible-link manipulator is derived via singular perturbation technique. For the fast subsystem, a linear quadratic regulator controller is designed. It depresses the oscillation of flexible links and drives the states to the slow manifold quickly. For the slow subsystem, an adaptive active disturbance rejection controller is proposed to track the desired angular position. A recursive least-squares algorithm is utilized to estimate the payload mass and compensate for the uncertainty. Simulation results show that the mean squire error is less than 0.08 rad even when the payload uncertainty up to 200% of the pre-estimation of the payload mass, which is superior to the case without compensation for the payload uncertain. Thus, the proposed control scheme guarantees a robust performance in presence of uncertain payload and under different maneuver speeds.
multiple-flexible-link manipulator; active disturbance rejection control; payload uncertainty; adaptive control; recursive least-squares
2016-05-16
中國博士后科學基金(2014M560255);機器人技術與系統國家重點實驗室開放研究項目(SKLRS-2013-ZD-05);黑龍江省博士后基金(LBH-Z14107)
劉延芳(1986—),男,博士,講師; 劉 宏(1966—),男,長江學者特聘教授,博士生導師
劉延芳,lyf04025121@126.com
TP244
A
0367-6234(2017)07-0012-08
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
中學生數理化·八年級物理人教版(2021年12期)2021-12-31 03:23:08
中學生數理化·中考版(2020年10期)2020-11-27 01:59:48
天天愛科學(2020年6期)2020-09-10 07:22:44
當代工人(2020年8期)2020-05-25 09:07:38
中國生殖健康(2019年2期)2019-08-23 08:12:08
數學物理學報(2017年6期)2018-01-22 02:26:40
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
科技知識動漫(2016年8期)2016-07-29 20:40:09
汽車觀察(2016年3期)2016-02-28 13:16:26