基于星-凸形隨機(jī)超曲面模型的擴(kuò)展目標(biāo)GM-PHD濾波器
2017-06-23 12:23:15馮新喜
彈箭與制導(dǎo)學(xué)報(bào) 2017年1期
關(guān)鍵詞:實(shí)驗(yàn)
魏 帥,馮新喜,王 泉
(空軍工程大學(xué)信息與導(dǎo)航學(xué)院,西安 710077)
基于星-凸形隨機(jī)超曲面模型的擴(kuò)展目標(biāo)GM-PHD濾波器
魏 帥,馮新喜,王 泉
(空軍工程大學(xué)信息與導(dǎo)航學(xué)院,西安 710077)
針對(duì)擴(kuò)展目標(biāo)聯(lián)合估計(jì)運(yùn)動(dòng)狀態(tài)和目標(biāo)外形的問(wèn)題,提出一種基于星-凸形隨機(jī)超曲面模型的擴(kuò)展目標(biāo)高斯混合概率密度濾波算法。該算法利用星-凸隨機(jī)超曲面模型對(duì)量測(cè)的擴(kuò)散程度進(jìn)行建模,在高斯混合概率假設(shè)密度的框架下,通過(guò)求解、更新遞推量測(cè)模型下的量測(cè)似然、新息等參數(shù)來(lái)實(shí)現(xiàn)對(duì)擴(kuò)展目標(biāo)的跟蹤。仿真實(shí)驗(yàn)表明,該算法在保證跟蹤有效性和可行性的同時(shí),提高了對(duì)擴(kuò)展目標(biāo)運(yùn)動(dòng)狀態(tài)和目標(biāo)外形的估計(jì)精度。
星-凸形;隨機(jī)超曲面模型;擴(kuò)展目標(biāo);高斯混合概率密度
0 引言
近年來(lái),隨著傳感器分辨率的不斷提高以及目標(biāo)與傳感器距離的不斷縮小,擴(kuò)展目標(biāo)的跟蹤問(wèn)題已成為跟蹤領(lǐng)域的研究熱點(diǎn)[1-4]。基于概率假設(shè)密度濾波器的多目標(biāo)跟蹤由于無(wú)需數(shù)據(jù)關(guān)聯(lián)且能在處理跟蹤問(wèn)題的過(guò)程中同步獲得動(dòng)態(tài)目標(biāo)數(shù)的估計(jì),因此受到廣泛關(guān)注。2009年,Mahler[5]推導(dǎo)獲得了擴(kuò)展目標(biāo)PHD(extended-target PHD,ET-PHD)濾波器。2010年,Granstrom[6]等在線性高斯假設(shè)條件下給出了ET-PHD濾波器的高斯混合實(shí)現(xiàn)。在此基礎(chǔ)上,文獻(xiàn)[7]對(duì)高斯混合擴(kuò)展目標(biāo)概率假設(shè)密度濾波器的收斂性進(jìn)行了分析,然而該算法假設(shè)量測(cè)分布在目標(biāo)的邊緣且制約了幾何結(jié)構(gòu)特性(橢圓或矩形)。文獻(xiàn)[8]將隨機(jī)矩陣與ET-PHD相結(jié)合,以混合高斯逆韋夏爾特分布近似目標(biāo)強(qiáng)度分布。但算法假設(shè)量測(cè)噪聲僅由目標(biāo)擴(kuò)散引起,忽略了傳感器自身噪聲,估計(jì)精度受限。針對(duì)此問(wèn)題,文獻(xiàn)[9]提出了一種基于橢圓隨機(jī)超曲面模型的群目標(biāo)高斯混合PHD濾波器,假設(shè)量測(cè)是由目標(biāo)上散布的量測(cè)源產(chǎn)生并考慮傳感器自身噪聲,因此獲得較高估計(jì)精度。然而由于外形橢圓的限制,難以靈活表征其它外形的擴(kuò)展目標(biāo)。
2011年,Baum[10]等提出利用星-凸(star-vertex)形對(duì)擴(kuò)展目標(biāo)外形進(jìn)行建模,星-凸形可表征包括橢圓在內(nèi)的更多樣式的擴(kuò)展目標(biāo)外形,有更好的近似程度。因此,文中考慮利用星-凸隨機(jī)超曲面模型對(duì)擴(kuò)展目標(biāo)的外形進(jìn)行描述,結(jié)合ET-GM-PHD算法,提出基于星-凸形隨機(jī)超曲面模型的擴(kuò)展目標(biāo)GM-PHD濾波器。該算法將目標(biāo)狀態(tài)參數(shù)和外形參數(shù)一起作為待估計(jì)向量,利用星-凸形隨機(jī)超曲面模型對(duì)量測(cè)進(jìn)行建模,同時(shí)給出ET-GM-PHD框架下量測(cè)似然等參數(shù)的求解和更新方法。仿真實(shí)驗(yàn)驗(yàn)證了算法的有效性和可行性。
1 星-凸形隨機(jī)超曲面模型
1.1 星-凸形參數(shù)化表示
與點(diǎn)目標(biāo)不同,擴(kuò)展目標(biāo)的狀態(tài)信息xk包括目標(biāo)運(yùn)動(dòng)狀態(tài)信息xc,k和外形信息xs,k,分別由其質(zhì)心和外形特征刻畫。在數(shù)學(xué)上,星-凸形模型可以通過(guò)一維徑向函數(shù)r(xs,k,θ)進(jìn)行表示。如圖1所示,徑向函數(shù)邊緣點(diǎn)的值僅與邊緣點(diǎn)到原點(diǎn)中心的距離和角度θ有關(guān)。因此,可以將r(xs,k,θ)進(jìn)行N階傅里葉級(jí)數(shù)展開[11],即:
(1)
式中:θk∈[0,2π),擴(kuò)展目標(biāo)的外形信息可由向量表示,即:
xs,k=[ak0,ak1,bk1,…,akN,bkN]
(2)
(3)
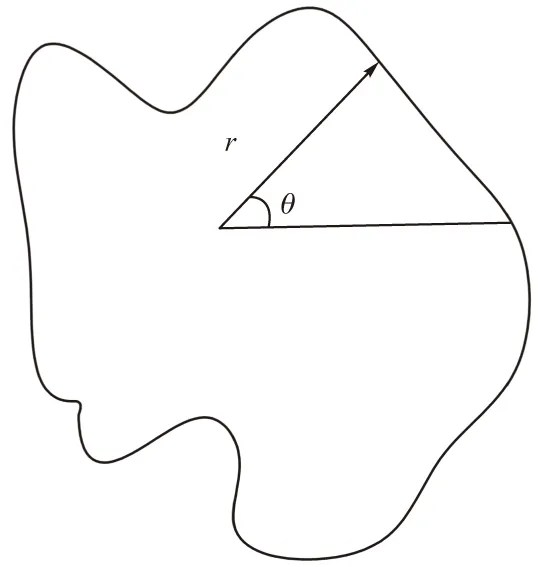
圖1 星-凸形模型
1.2 星-凸形隨機(jī)超曲面模型
對(duì)星-凸形擴(kuò)展目標(biāo)建模的一種有效的具體方法可采用隨機(jī)超曲面模型[12](random hypersurface model,RHM)的形式,RHM是一種描述量測(cè)源分布的特殊模型。RHM模型認(rèn)為量測(cè)源分布于縮小的目標(biāo)真實(shí)形狀上,即假設(shè)S(xs,k,xc,k)表示擴(kuò)展目標(biāo)的邊界,sk,l表示縮放因子,則量測(cè)源可表示為:
zk,l,s=xc,k+sk,l(S(xs,k,xc,k)-xc,k)
(4)
因此,星-凸形RHM量測(cè)源模型可表示為:
zk,l,s=xc,k+sk,lr(xs,k,θk)e(θk)
(5)
e(θk)=[cos(θk) sin(θk)]T
(6)
則基于星-凸形RHM的量測(cè)模型表達(dá)式為:
zk,l=zk,l,s+vk,l=xc,k+sk,l·(S(xs,k,xc,k)-xc,k)+vk,l=xc,k+sk,lR(θk,l)xs,ke(θk,l)+vk,l
(7)
式中:θk是未知的,可以通過(guò)量測(cè)源zk,l,s和xc,k進(jìn)行計(jì)算,sk,l近似服從高斯分布。
2 基于星-凸形隨機(jī)超曲面模型的擴(kuò)展目標(biāo)跟蹤
2.1 擴(kuò)展目標(biāo)高斯混合PHD濾波器
xi,k+1=Fkxi,k+Gkwi,k
(8)
式中:i=1,…,Nx,k,wi,k表示協(xié)方差為Qi,k的高斯白噪聲。每個(gè)目標(biāo)均服從相同的狀態(tài)方程,且相互獨(dú)立。
假設(shè)預(yù)測(cè)PHD高斯混合表示為
(9)
式中:Jk|k-1表示預(yù)測(cè)分量的數(shù)量;wj,k|k-1表示第j個(gè)分量的權(quán)值;mj,k|k-1和Pj,k|k-1分別表示第j個(gè)分量的預(yù)測(cè)均值和協(xié)方差。N(x;m,P)表示變量x服從均值為m、協(xié)方差為P的高斯分布。
假設(shè)量測(cè)個(gè)數(shù)服從泊松分布,則量測(cè)更新PHD可表示:
Dk|k(x|Z)=LZ(x)Dk|k-1(x|Z)
(10)
式中:LZ(x)表示量測(cè)偽似然函數(shù),其表達(dá)式為
(11)
量測(cè)集合的劃分對(duì)擴(kuò)展目標(biāo)跟蹤結(jié)果具有較大的影響,文中采用文獻(xiàn)[6]給出的基于距離的量測(cè)劃分方法,具體方法參見文獻(xiàn)[6]。
2.2 基于星-凸形隨機(jī)超曲面模型的PHD更新

(12)

考慮量測(cè)某一劃分情況下非空集合中的所有量測(cè)以及某一預(yù)測(cè)高斯項(xiàng)。由于目標(biāo)運(yùn)動(dòng)方程為線性的,因此,預(yù)測(cè)均值mA,k|k-1和方差PA,k|k-1可通過(guò)卡爾曼濾波進(jìn)行求解
(13)
(14)

(15)

(16)
(17)
(18)
(19))
由分析可知[11],對(duì)于星-凸形模型來(lái)說(shuō),必須對(duì)模型參數(shù)做一定限制,否則會(huì)出現(xiàn)不可預(yù)測(cè)的結(jié)果,即
(20)
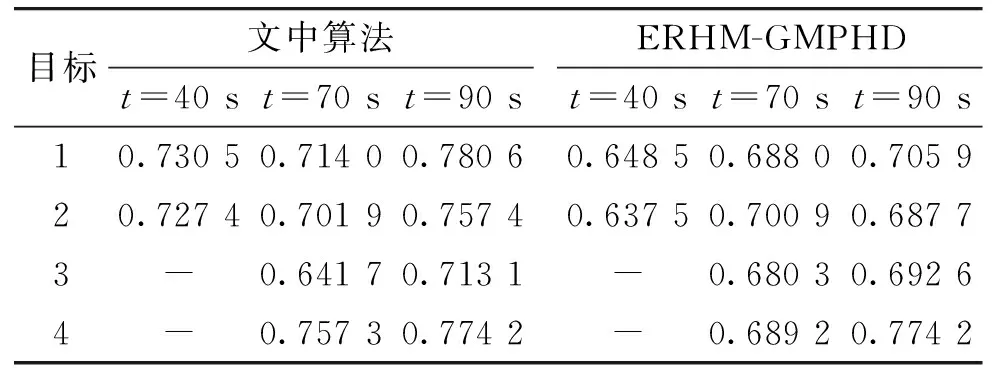
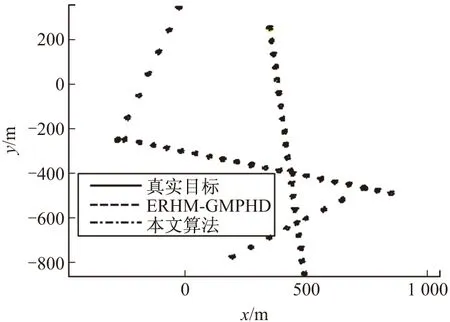
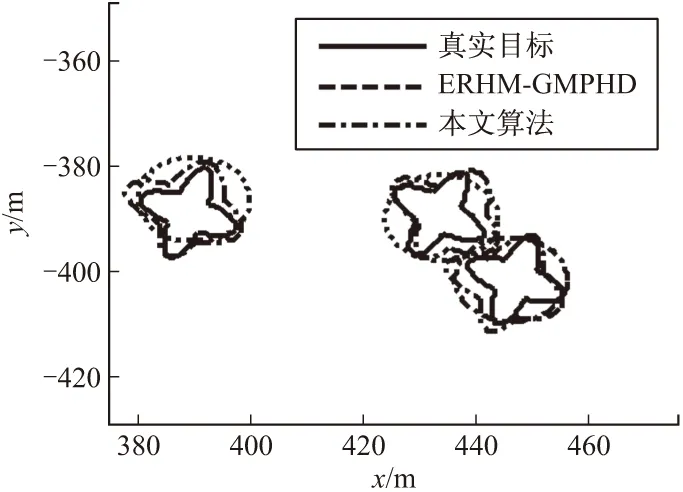
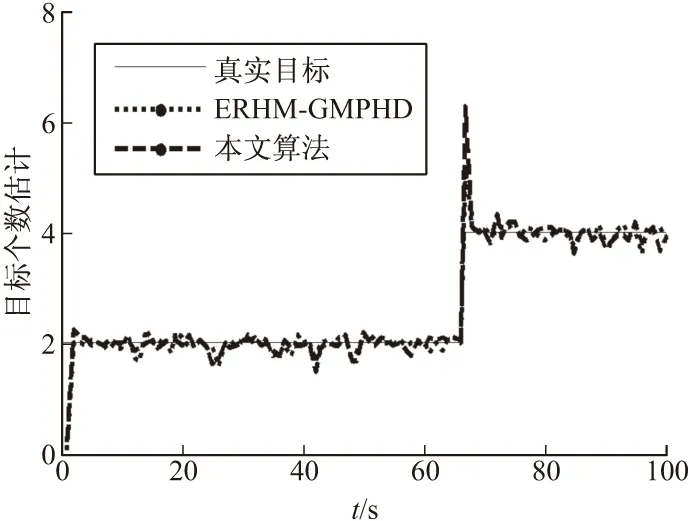
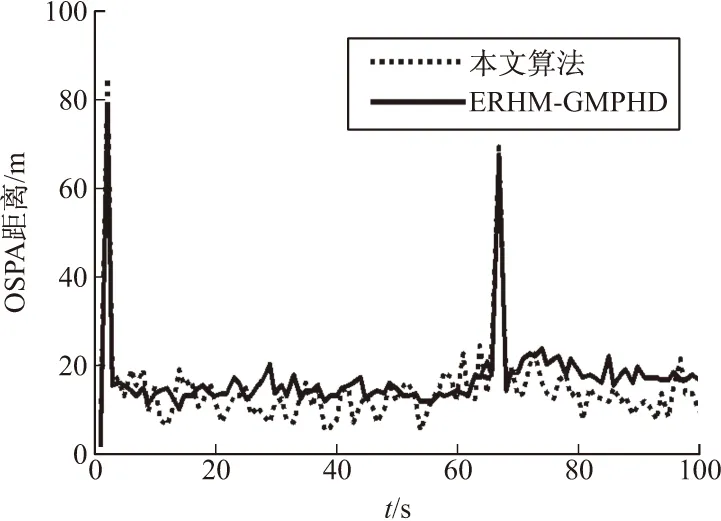
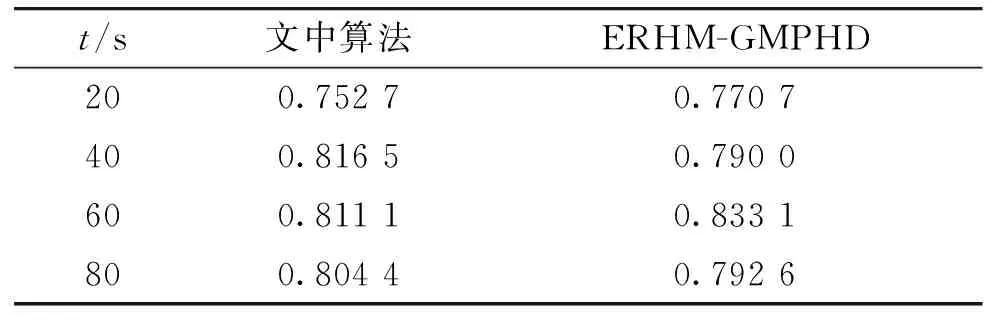
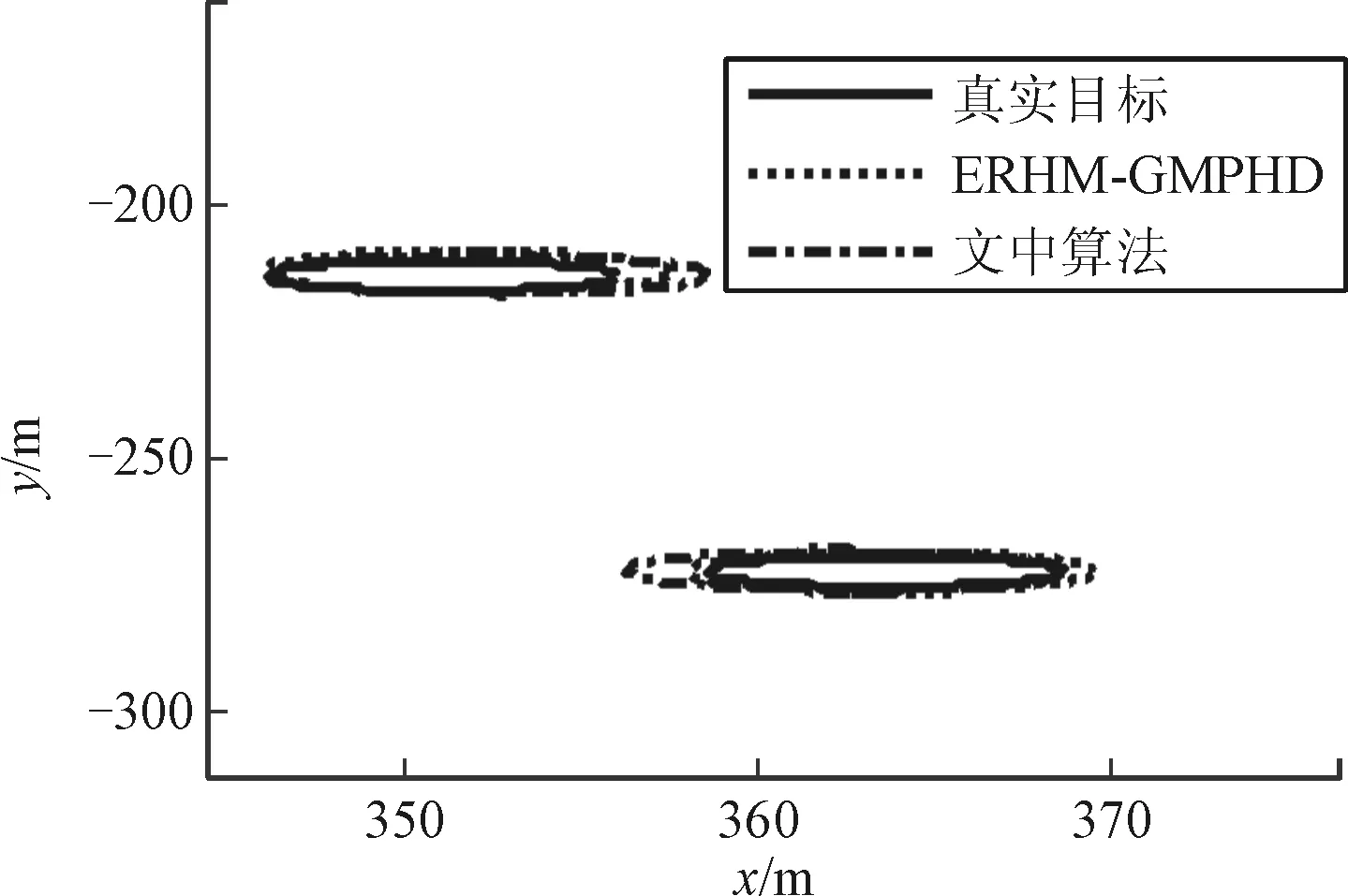
s.t.Lk (21) 式中:ck(xs,k)表示約束函數(shù),Lk表示約束下界。對(duì)于ck(xs,k)的形式,文中采用采樣約束[11]。當(dāng)集合中所有量測(cè)均執(zhí)行完上述操作后,可得到對(duì)應(yīng)高斯分量的均值和協(xié)方差,從而可得量測(cè)似然為 (22) 將式(22)和對(duì)應(yīng)的參數(shù)代入式(10)則可得到量測(cè)更新PHD。 文中將所提算法與基于橢圓隨機(jī)超平面模型的擴(kuò)展目標(biāo)GM-PHD濾波器(ERHM-GMPHD)進(jìn)行比較分析。分兩個(gè)實(shí)驗(yàn)討論,實(shí)驗(yàn)一討論兩種濾波器跟蹤星-凸形擴(kuò)展目標(biāo)的情況;實(shí)驗(yàn)二分析兩種濾波器跟蹤橢圓形擴(kuò)展目標(biāo)的情況,并比較兩種算法的跟蹤性能。算法性能評(píng)估采用兩個(gè)有形目標(biāo)的交和兩個(gè)有形目標(biāo)的并的面積比值進(jìn)行衡量[13](intersection-over-union,IOU),由于星-凸目標(biāo)的特殊性,文中提出利用圖像分析方法進(jìn)行面積求解。面積求解思路為:步驟1:將圖中需求解面積的部分進(jìn)行分割并填色;步驟2:將圖轉(zhuǎn)換為灰度圖;步驟3:將閾值法灰度圖轉(zhuǎn)成二值圖像;步驟4:利用黑色/總像素的比值乘以圖像的總面積,從而得到區(qū)域A的面積。 3.1 實(shí)驗(yàn)一 設(shè)二維觀測(cè)區(qū)域?yàn)閤∈[-1 000 m,1 000 m],y∈[-1 000 m,1 000 m],考慮單傳感器跟蹤4個(gè)目標(biāo)的運(yùn)動(dòng)情況,傳感器坐標(biāo)為S=(1 000 m,0 m),3個(gè)目標(biāo)相繼出現(xiàn),整個(gè)觀測(cè)時(shí)間持續(xù)100 s,各目標(biāo)初始狀態(tài)以及出生和消亡的時(shí)間分別為:目標(biāo)1:[350 m150/99 m/s250 m-1150/99 m/s1 s/100 s];目標(biāo)2:[-250 m1150/99 m/s-250 m-250/99 m/s1 s/100 s];目標(biāo)3:[650 m-500/33 m/s-520 m-280/33 m/s67 s/100 s];目標(biāo)4:[-280 m-280/33 m/s-250 m650/33 m/s67 s/100 s]。目標(biāo)運(yùn)動(dòng)狀態(tài)表示為xk=[(xs,k)′,(xc,k)′]T,縮放因子sk,l∈N(0.7,0.05),采樣周期T=1 s。考慮計(jì)算量,文中所提算法采用9階傅里葉級(jí)數(shù)展開對(duì)目標(biāo)的外形進(jìn)行描述。則狀態(tài)方程表示為:xk+1=Akxk+wk (23) 仿真參數(shù)設(shè)置最大高斯分量數(shù)目Jmax=100,修剪門限Tp=10-4,合并門限U=4,目標(biāo)存活概率Ps=0.99,檢測(cè)概率Pd=0.99。每一時(shí)刻每個(gè)目標(biāo)產(chǎn)生的量測(cè)個(gè)數(shù)服從均值為6的泊松分布,雜波率為3,且在觀測(cè)區(qū)域內(nèi)均勻分布。量測(cè)噪聲服從N(0,R),R=diag(0.62,0.62)。簡(jiǎn)單起見,不考慮目標(biāo)衍生過(guò)程,新生目標(biāo)的PHD為:Db(x)=0.1N(x;mb,Pb)+0.1N(x;-mb,Pb) (24) (25) 不考慮目標(biāo)衍生過(guò)程,其對(duì)應(yīng)的新生目標(biāo)的PHD為:Db(x)=0.1N(x;mb,Pb)+0.1N(x;-mb,Pb) (26) 式中:mb=[10,10,0,250,0,250,0]T;Pb=diag(2,2,0.1,100,25,100,25)。其它參數(shù)設(shè)置與文中所提算法相同。 表1 各目標(biāo)IOU值 圖2給出了50次蒙特卡羅仿真實(shí)驗(yàn)平均后得到的跟蹤結(jié)果圖。從圖2中粗略可以看出,文中所提算法和ERHM-GMPHD算法均能夠較好的估計(jì)出目標(biāo)運(yùn)動(dòng)的方向和軌跡。圖3給出了估計(jì)結(jié)果局部放大圖,進(jìn)一步分析可知,ERHM-GMPHD算法雖然能將目標(biāo)整個(gè)包含在估計(jì)橢圓內(nèi),但卻無(wú)法估計(jì)出目標(biāo)的形狀。相反,文中算法能夠?qū)π?凸形目標(biāo)的輪廓進(jìn)行較為準(zhǔn)確的估計(jì)。為衡量算法對(duì)目標(biāo)外形估計(jì)的準(zhǔn)確程度,文中采用IOU值作為評(píng)價(jià)指標(biāo)。表1給出了4個(gè)目標(biāo)在不同時(shí)刻的IOU值,從表中可以看出,文中所提算法估計(jì)得到各目標(biāo)的IOU值總體上大于ERHM-GMPHD算法得到的IOU值,說(shuō)明文中算法估計(jì)目標(biāo)形狀與真實(shí)目標(biāo)形狀之間具有較高的重合度,因此,文中算法可較為準(zhǔn)確的估計(jì)出星-凸形目標(biāo)的擴(kuò)散外形。 圖2 濾波結(jié)果 圖3 局部結(jié)果放大圖 圖4和圖5分別給出了50次蒙特卡羅仿真實(shí)驗(yàn)平均后得到的多目標(biāo)個(gè)數(shù)估計(jì)隨時(shí)間變化曲線和質(zhì)心位置估計(jì)的OSPA曲線圖。從圖中可知,在目標(biāo)個(gè)數(shù)發(fā)生變化的時(shí)刻,對(duì)兩種算法而言,無(wú)論是目標(biāo)個(gè)數(shù)估計(jì)曲線還是OSPA曲線,均具有較大的波動(dòng),但一旦進(jìn)入目標(biāo)數(shù)目恒定階段,兩種算法則可快速收斂,從而使得OSPA值迅速變小且準(zhǔn)確估計(jì)出目標(biāo)個(gè)數(shù)值,但從總體來(lái)看,文中算法對(duì)目標(biāo)質(zhì)心位置估計(jì)的OSPA距離更小,因此,相比于ERHM-GMPHD,文中算法在對(duì)星-凸外形目標(biāo)外形輪廓進(jìn)行準(zhǔn)確描述的同時(shí),對(duì)目標(biāo)質(zhì)心位置的估計(jì)精度也有所提高。 圖4 目標(biāo)數(shù)目估計(jì) 圖5 OSPA距離 3.2 實(shí)驗(yàn)二 在本實(shí)驗(yàn)中,針對(duì)橢圓形目標(biāo),考察文中所提算法和基于橢圓隨機(jī)超平面的模型的算法的跟蹤性能。設(shè)二維觀測(cè)區(qū)域?yàn)閤∈[-1 000 m,1 000 m],y∈[-1 000 m,1 000 m],考慮單傳感器跟蹤單個(gè)目標(biāo)的運(yùn)動(dòng)情況,傳感器坐標(biāo)為S=(1 000 m,0 m),采樣周期T=1 s,各目標(biāo)初始狀態(tài)(350 m150/99 m/s250 m-1150/99 m/s),整個(gè)觀測(cè)時(shí)間持續(xù)100 s。其它參數(shù)設(shè)置與實(shí)驗(yàn)一相同。 表2 不同算法IOU值 執(zhí)行50次蒙特卡羅仿真,結(jié)果如圖6和圖7所示。從圖6的濾波結(jié)果可以看出,文中算法和ERHM-GMPHD算法能夠?qū)E圓形目標(biāo)的運(yùn)動(dòng)軌跡進(jìn)行較準(zhǔn)確的估計(jì)。從圖7的估計(jì)結(jié)果局部放大圖可知,兩種算法均能準(zhǔn)確的估計(jì)出目標(biāo)的輪廓,為進(jìn)一步比較兩種算法對(duì)目標(biāo)外形估計(jì)情況,表2給出了兩種算法在不同時(shí)刻的IOU值,從表中可以看出,兩種算法對(duì)目標(biāo)輪廓估計(jì)的IOU值較為接近,且均在0.8附近波動(dòng),說(shuō)明估計(jì)目標(biāo)與真實(shí)目標(biāo)之間具有較高的重合度,因此,文中算法和ERHM-GMPHD對(duì)具有橢圓外形的單一擴(kuò)展目標(biāo)估計(jì)的能力一致,均能對(duì)橢圓形目標(biāo)進(jìn)行位置和外形的準(zhǔn)確估計(jì)。為進(jìn)一步驗(yàn)證文中算法跟蹤橢圓目標(biāo)的能力,文中在實(shí)驗(yàn)一的仿真參數(shù)環(huán)境下對(duì)具有橢圓外形的多擴(kuò)展目標(biāo)進(jìn)行50次蒙特卡羅仿真實(shí)驗(yàn),從實(shí)驗(yàn)結(jié)果可知,兩種算法對(duì)多目標(biāo)的輪廓估計(jì)的IOU值較為接近,且均在0.73附近波動(dòng),進(jìn)一步說(shuō)明了文中算法與ERHM-GMPHD對(duì)具有橢圓外形算法估計(jì)能力的一致性。圖8給出了兩種算法質(zhì)心估計(jì)的OSPA距離曲線,從OSPA距離曲線可知,兩種算法的估計(jì)結(jié)果均保持在較小的值,從而說(shuō)明了兩種算法的估計(jì)能力。 綜上所述,文中給出的算法可跟蹤包括橢圓在內(nèi)的多種樣式的擴(kuò)展目標(biāo)外形,且具有較準(zhǔn)確的近似程度,然而,由于星-凸模型參數(shù)估計(jì)的復(fù)雜性,使得文中所提算法增加了運(yùn)算復(fù)雜性,但從跟蹤精確度和外形估計(jì)能力上看,文中所提算法跟蹤能力優(yōu)于ERHM-GMPHD算法。 針對(duì)擴(kuò)展目標(biāo)聯(lián)合估計(jì)運(yùn)動(dòng)狀態(tài)和目標(biāo)外形的問(wèn)題,提出了一種基于星-凸形隨機(jī)超曲面模型的擴(kuò)展目標(biāo)GM-PHD濾波算法。分別對(duì)跟蹤星-凸形擴(kuò)展目標(biāo)和橢圓形擴(kuò)展目標(biāo)情況進(jìn)行了仿真實(shí)驗(yàn),實(shí)驗(yàn)分析表明,文中所提的算法在保證跟蹤有效性和可行性的同時(shí)提高了對(duì)擴(kuò)展目標(biāo)運(yùn)動(dòng)狀態(tài)和目標(biāo)外形的估計(jì)精度。下一步,將對(duì)算法的運(yùn)算復(fù)雜性以及性能評(píng)估指標(biāo)進(jìn)行深入研究。 圖6 濾波結(jié)果 圖7 局部結(jié)果放大圖 圖8 OSPA距離 [1] GILHOLM K, SALMOND D. Spatial distribution model for tracking extended objects [J]. IEE Proceedings:Radar, Sonar and Navigation, 2005, 152(5): 364-371. [2] GILHOLM K, GODSILL S, MASKELL S, et al. Poisson models for extended target and group tracking [J]. SPIE Processing, 2005, 5913: 230-241. [3] KOCH J W. Bayesian approach to extended object and cluster tracking using random matrices [J]. IEEE Transactions on Aerospace and Electronic Systems, 2008, 44(3): 1042-1059. [4] MAHLER R P S. Multitarget Bayes filtering via first-order multitarget moments [J]. IEEE Transactions on Aerospace and Electronic Systems, 2003, 39(4): 1152-1178. [5] MAHLER R. PHD filters for nonstandard targets: I Extended targets [C]∥12th International Conference on Information Fusion, 2009: 915-921. [6] GRANSTR?M K, LUNDQUIST C, ORGUNER U. A Gaussian mixture PHD filter for extended target tracking [C]∥13th International Conference on Information Fusion, 2010: 1-8. [7] 連峰, 韓崇昭, 劉偉峰. 高斯混合擴(kuò)展目標(biāo)概率假設(shè)密度濾波器的收斂性分析 [J]. 自動(dòng)化學(xué)報(bào), 2012, 38(8): 1343-1352. [8] GRANSTR?M K, ORGUNER U. A PHD filter for tracking multiple extended targets using random matrices [J]. IEEE Transactions on Signal Processing, 2012, 60(11): 5657-5671. [9] 張慧, 徐暉, 王雪瑩, 等. 一種基于橢圓隨機(jī)超曲面模型的群目標(biāo)高斯混合PHD濾波器 [J]. 光學(xué)學(xué)報(bào), 2013, 33(9): 0904001-1-0904001-10. [10] BAUM M, HANEBECK U D. Shape tracking of extended objects and group targets with star-convex RHMs [C]∥14th International Conference on Information Fusion, 2011:338-345. [11] SUN Lifan, LAN Jian, LI X, et al. Extended target tracking using star-convex model with nonlinear inequality constraints [C]∥Proceedings of the 31st Chinese Control Conference, 2012: 3869-3874. [12] BAUM M, HANEBECK U D. Random hypersurface models for extended object tracking [C]∥IEEE International Symposium on Signal Processing and Information Technilogy (ISSPIT), 2009: 178-183. [13] GRANSTR?M K, LUNDQUIST C, ORGUNER U. Tracking rectangular and elliptical extended targets using laser measurements [C]∥14th International Conference on Information Fusion, 2011:592-599. A Gaussian Mixture PHD Filter for Extended Target Based on Star-convex Random Hypersurface Model WEI Shuai,FENG Xinxi,WANG Quan (Information and Navigation College, Air Force Engineering University, Xi’an 710077, China) A Gaussian mixture PHD filter for extended target tracking based on star-convex random hypersurface model was proposed for the problem of joint estimation of the extended target shape and motion state. The proposed algorithm modelled the diffusion degree of measuration by using the star-convex random hypersurface model. Then, the extended targets were tracked by calculating and updating the measurement likelihood and innovation under the Gaussian mixture probability hypothesis density framework. The simulation results showed that the proposed method could guarantee the tracking availability and feasibility and improve the estimated accuracy of extended target motion state as well as the target shape. star-convex; random hypersurface model; extended target; Gaussian mixture probability hypothesis density 2016-03-19 國(guó)家自然科學(xué)基金(61571458);陜西省自然科學(xué)基金(2011JM8023)資助 魏帥(1993-),女,北京人,碩士研究生,研究方向:目標(biāo)跟蹤。 TN953 A3 仿真實(shí)驗(yàn)分析

4 總結(jié)


猜你喜歡
作文·小學(xué)低年級(jí)(2025年2期)2025-02-13 00:00:00
小雪花·小學(xué)生快樂(lè)作文(2024年11期)2024-12-31 00:00:00
作文·小學(xué)低年級(jí)(2024年2期)2024-04-29 00:00:00
作文·小學(xué)低年級(jí)(2023年3期)2023-04-29 00:00:00
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
小主人報(bào)(2022年4期)2022-08-09 08:52:06
中學(xué)生數(shù)理化·中考版(2022年11期)2022-02-16 07:01:20
小哥白尼(趣味科學(xué))(2019年6期)2019-10-10 01:01:50
發(fā)明與創(chuàng)新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
