制導剛度受限時不同結構駕駛儀對制導精度的影響分析
2017-06-23 12:23:20栗金平黎海青張曉峰張正同
彈箭與制導學報 2017年1期
關鍵詞:指令
栗金平,黎海青,張曉峰,張正同
(中國兵器工業第203研究所,西安 710065)
制導剛度受限時不同結構駕駛儀對制導精度的影響分析
栗金平,黎海青,張曉峰,張正同
(中國兵器工業第203研究所,西安 710065)
為有效提高比例導引制導反坦克導彈近射程作戰能力,需研究制導剛度受限時,不同結構自動駕駛儀對制導精度的影響。首先對反坦克導彈比例導引制導系統形式進行了闡述;然后給出常用的自動駕駛儀,并對不同自動駕駛儀的動態性能進行對比分析;最后分析對應的線性比例導引制導系統模型,得出在制導剛度受限條件下,阻尼回路自動駕駛儀對應制導系統制導精度最高。
比例導引;自動駕駛儀;頻域分析;時域分析
0 引言
為有效提高采用比例導引制導反坦克導彈近射程作戰能力,需要研究影響導彈近射程制導精度的因素。自動駕駛儀作為制導系統的內回路,核心任務是保證導彈精確、魯棒的跟蹤制導系統生成的輸入指令,使導彈根據控制指令產生控制力矩和控制力來改變導彈的攻角,進而改變速度矢量方向,使導彈穩定飛行直至命中目標[1]。自動駕駛儀不同,其動態性能必然不同,對制導系統的影響也不盡相同。
目前,根據自動駕駛儀的結構種類,比例導引制導反坦克導彈制導系統形式主要有3種:一是比例導引回路+開環自動駕駛儀;二是比例導引回路+阻尼回路駕駛儀;三是比例導引回路+經典三回路過載駕駛儀。文中主要分析反坦克導彈制導剛度受限時,即攻擊近射程目標,比例導引段時間不能充分滿足彈道收斂要求時,不同駕駛儀對反坦克導彈近射程制導系統性能的影響。
1 反坦克導彈常用自動駕駛儀
反坦克導彈自動駕駛儀,主要是指導彈的執行機構、彈體及相應的控制器等構成的閉環系統。
1.1 開環自動駕駛儀
開環自動駕駛儀由過載指令控制增益、舵機和彈體組成,結構形式如圖1所示。

圖1 開環自動駕駛儀結構框圖
圖1中:nyc為法向過載指令;ny為法向過載響應;ωz為俯仰角速度;Kn1為過載指令控制增益。
開環自動駕駛儀接收制導系統生成的比例導引過載指令,通過過載指令控制增益進行放大,得到舵機指令,舵機根據指令產生控制力矩,操縱導彈姿態旋轉,實現需用過載。但是該控制系統傳遞函數是彈體傳遞函數,為了獲得適當的末制導系統特性,彈體必需穩定。另外,為獲得適當的有效導航比,要求精確確定導彈的氣動特性[2]。
1.2 阻尼回路自動駕駛儀
為了使自動駕駛儀具有良好的阻尼特性,在開環自動駕駛儀的基礎上增加阻尼回路,即構成了阻尼回路自動駕駛儀,結構形式如圖2所示。
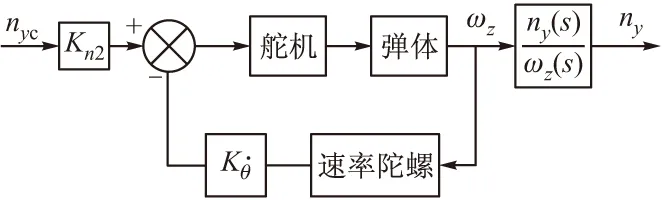
圖2 阻尼回路自動駕駛儀結構框圖

阻尼回路自動駕駛儀工作原理與開環近似,形成過載控制指令后,與阻尼回路控制指令綜合后形成舵機指令,操縱導彈姿態旋轉,實現需用過載。該控制系統的動態響應基本上是具有理想阻尼和有比彈體自然頻率稍高的二階傳遞函數的響應[2]。但是該控制系統能夠適應彈體的靜不穩定范圍是有限的[1]。
1.3 經典三回路過載駕駛儀
經典三回路過載駕駛儀相對阻尼回路自動駕駛儀,增加了角速度積分增穩回路和過載反饋回路,結構形式如圖3所示。
經典三回路過載駕駛儀使用比例導引過載指令和實際過載反饋之間的誤差形成過載控制指令,綜合角速度積分增穩回路指令和阻尼回路指令形成舵機控制指令。優點是既可以保證導彈飛行范圍內的有效導航比,又能適應靜不穩定彈體的控制;缺點是需要的測量信息較多,實現時相對復雜。
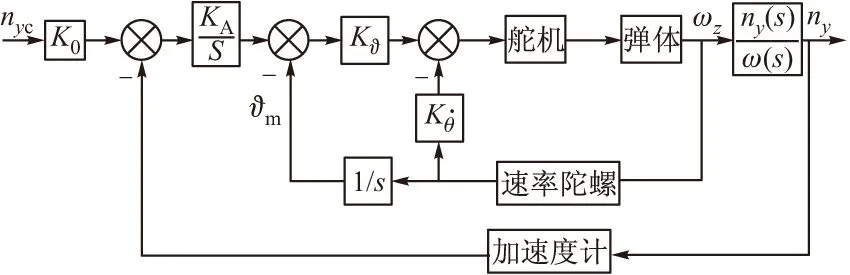
圖3 經典三回路過載駕駛儀結構框圖

1.4 自動駕駛儀性能對比
以某型反坦克導彈氣動外形為參考,選取飛行海拔高度為1 400 m、飛行速度為0.3Ma作為設計特征點,對3種自動駕駛儀線性模型進行對比分析。經計算,特征點對應的動力學系數a1=0.63,a2=98.73,a3=170.86,a4=1.03,a5=0.33,因此對應的彈體傳遞函數為:
彈體阻尼系數為0.083。舵機帶寬為20 Hz,以理想二階環節描述其特性,對應的傳遞函數為:

對設計的3種駕駛儀線性模型進行時域分析,階躍響應曲線如圖4所示。根據結果可知,階躍響應上升時間最短的為開環自動駕駛儀,最長的為經典三回路過載駕駛儀,但是由于開環自動駕駛儀除了過載指令控制增益外,傳遞函數為純彈體傳遞函數,而彈體阻尼系數僅為0.076,所以其階躍響應超調大,調節時間長,動態性能差。阻尼回路自動駕駛儀與經典三回路過載駕駛儀相比,阻尼回路控制增益相同,但是前者對應的時間常數短,響應快,對氣動參數、速度和高度的準確性要求更高。
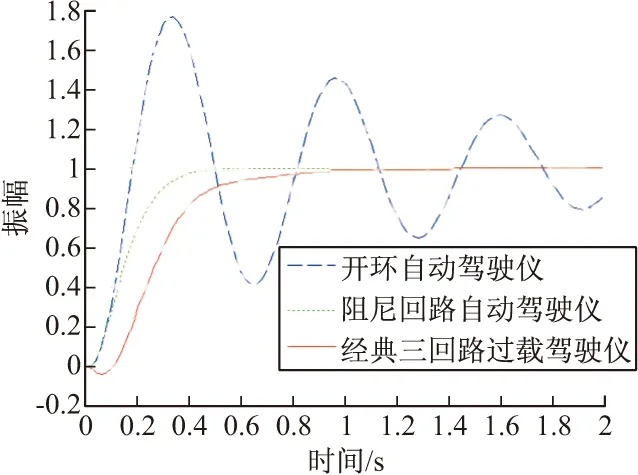
圖4 3種自動駕駛儀階躍響應曲線圖
2 駕駛儀對制導精度的影響分析
反坦克導彈比例導引制導系統包括平臺式導引頭、低通濾波器、比例導引律、自動駕駛儀、導彈運動學和彈目相對運動學。文中分別通過頻域和時域分析不同結構駕駛儀對制導精度的影響。
2.1 制導系統模型
開環自動駕駛儀、阻尼回路自動駕駛儀和經典三回路過載駕駛儀對應的線性制導系統模型分別為圖5~圖7所示。
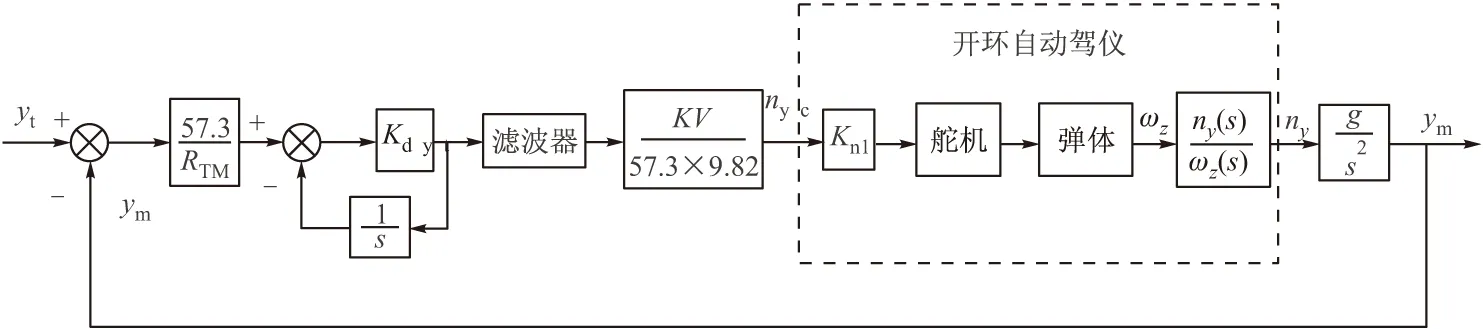
圖5 開環自動駕駛儀對應制導系統模型
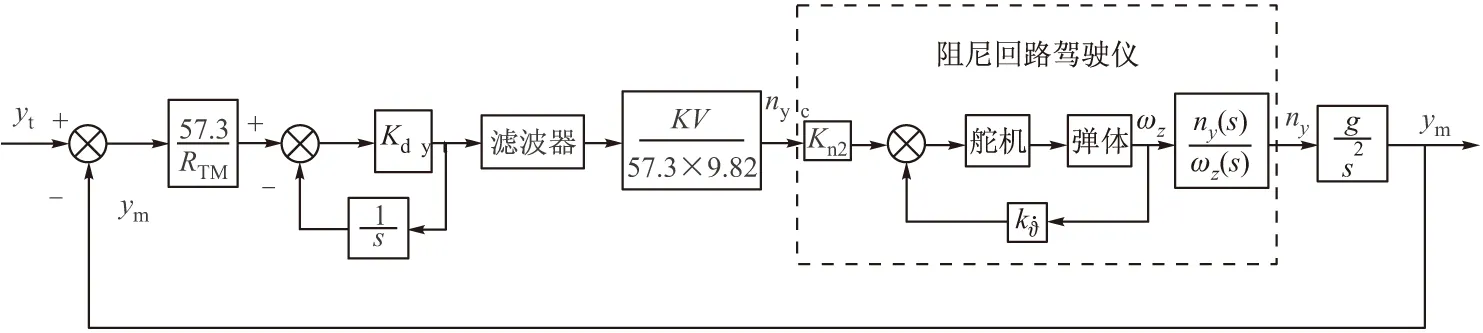
圖6 阻尼回路自動駕駛儀對應制導系統模型
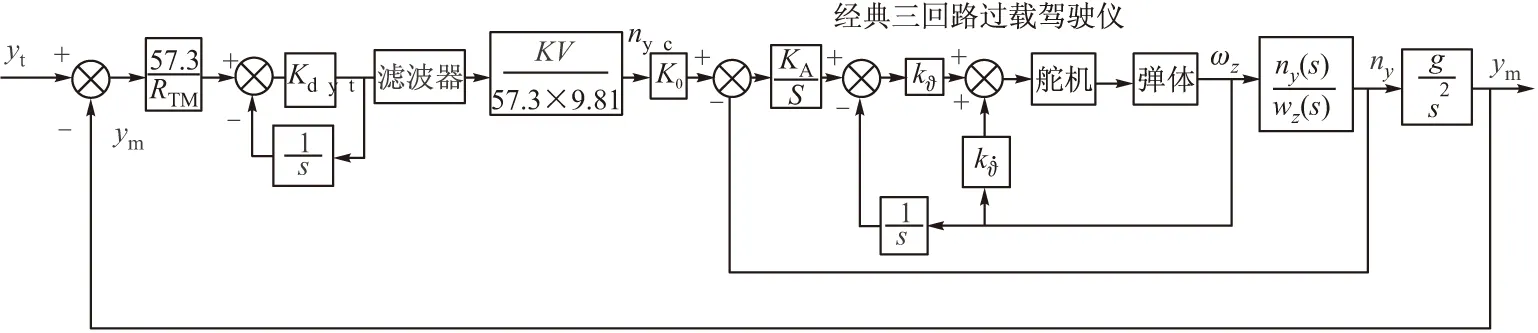
圖7 經典三回路過載駕駛儀對應制導系統模型
2.2 制導系統頻域分析
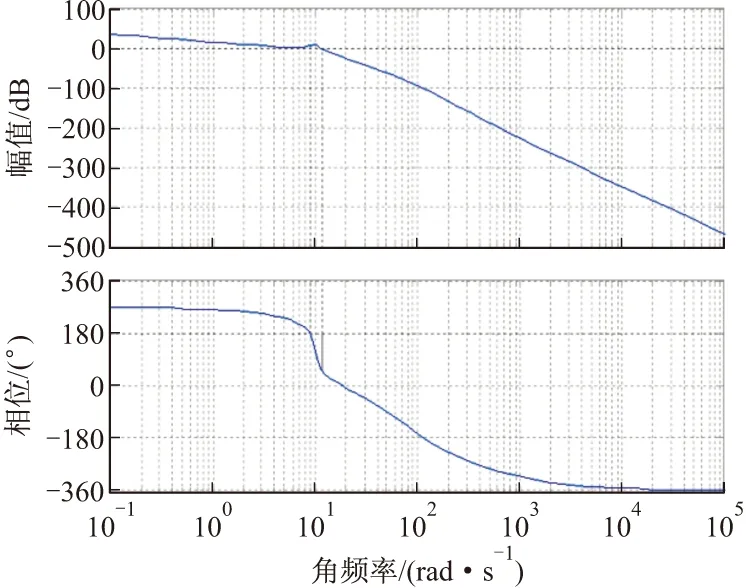
圖8 開環自動駕駛儀對應制導系統bode圖
制導系統開環bode圖表征此飛行狀態下,比例導引制導系統的穩定性。由bode圖可看出,開環自動駕駛儀和經典三回路過載駕駛儀對應的制導系統已經不穩定,即在選取的飛行特征點下,開環自動駕駛儀和經典三回路過載駕駛儀對應比例導引制導系統的末端發散距離大于50 m。由于阻尼回路自動駕駛儀對應比例導引制導系統彈道末端發散最晚,因此3種制導系統在相同導航比條件下,阻尼回路駕駛儀對應比例導引制導系統的制導精度最高。
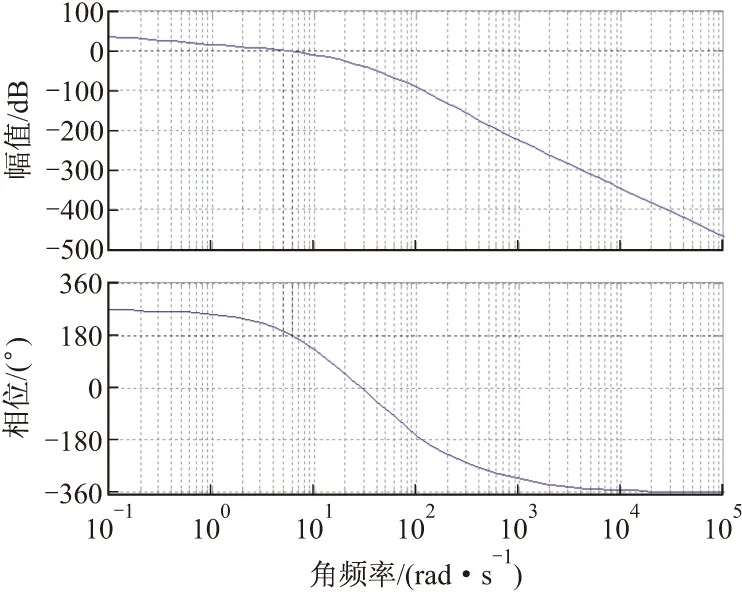
圖9 阻尼回路自動駕駛儀對應制導系統bode圖
2.3 制導系統時域分析
導彈攻擊近射程目標時,飛行時間短,對彈道的快速收斂有極高的要求,自動駕駛儀結構不同,制導系統的收斂速度也不相同,導致制導精度也不相同。下面把彈目距離RTM看作變量,分析不同結構自動駕駛儀對比例導引制導系統收斂速度的影響。
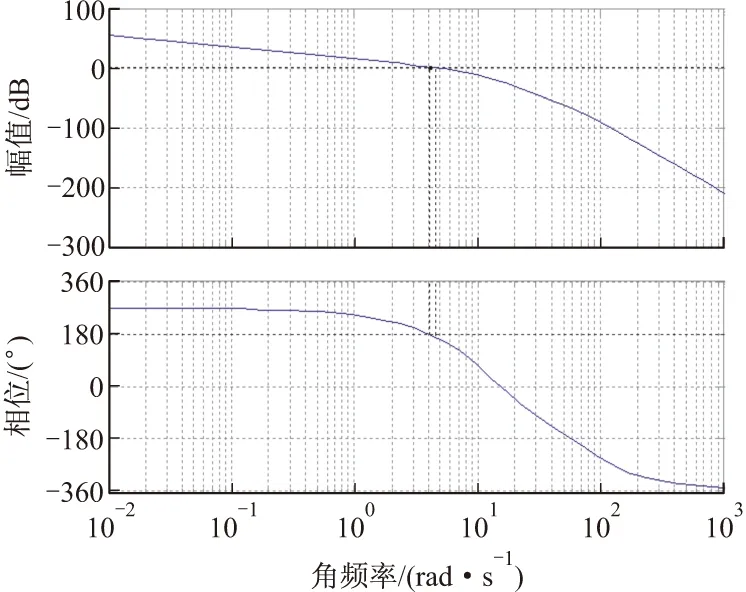
圖10 經典三回路過載駕駛儀對應制導系統bode圖
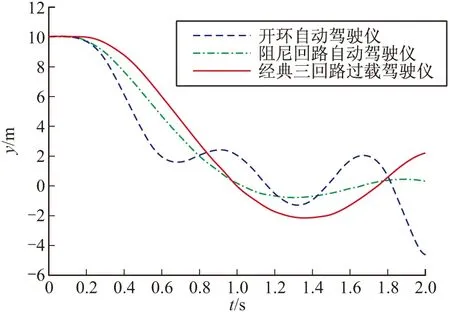
圖11 RTM0=200 m時不同制導系統時域響應
通過對3種制導系統進行頻域和時域分析得出,相同條件下,阻尼回路自動駕駛儀對應比例導引制導系統彈道末端發散最晚,彈道收斂速度最快,因而在制導剛度受限時,其制導精度最高。
3 結論
文中首先闡述了反坦克導彈比例導引制導系統的實現形式;然后對常用自動駕駛儀的動態性能進行對比分析;最后對不同駕駛儀對應的比例導引制導系統模型進行頻域和時域分析,得出末制導時間受限時,阻尼回路自動駕駛儀對應的比例導引制導系統彈道末端發散最晚,收斂速度最快,因而最適用于攻擊近射程目標。
[1] 林德福, 王輝, 王江, 等. 戰術導彈自動駕駛儀設計與制導律分析 [M]. 北京: 北京理工大學出版社, 2012: 4.
[2] 楊軍, 楊晨, 段朝陽, 等. 現代導彈制導控制系統設計 [M]. 北京: 航空工業出版社, 2005: 49.
[3] 劉曉俠, 楊凱, 嚴憲軍, 等. 反坦克導彈導引回路設計與仿真 [J]. 彈箭與制導學報, 2009, 29(6): 38-40.
[4] 夏群力, 郭濤, 祁載康, 等. 空地導彈對應不同駕駛儀下的中制導高度控制回路設計 [J]. 系統仿真學報, 2008, 20(24): 6763-6766.
[5] 楊廣慧, 孫友, 鞏慶海, 等. 某類比例導引飛行器的制導回路穩定性分析方法 [J]. 航天控制, 2013, 31(1): 11-14.
The Impact Analysis of Autopilots with Different Structures on Guidance Accuracy when the Guidance Stiffness was Constrained
LI Jinping,LI Haiqing,ZHANG Xiaofeng,ZHANG Zhengtong
(No.203 Research Institute of China Ordnance Industries, Xi’an 710065, China)
In order to improve the combat capability of the anti tank missile using the proportional navigation in the near range, the influence of the autopilots with different structures on the guidance accuracy was studied. First, the form of the anti tank missile’s guidance system using the proportional navigation was described. Then, the common autopilot was given, and the dynamic performance of different autopilots was compared and analyzed. At last, the corresponding linear proportional navigation guidance system model was analyzed. It was concluded that the guidance precision of corresponding guidance system of damping loop autopilot was the highest under the condition of limited guidance stiffness.
proportional navigation; autopilot; frequency domain analysis; time domain analysis
2016-03-08
栗金平(1984-),男,河南商丘人,工程師,碩士,研究方向:導彈精確制導與控制。
TJ765
A
猜你喜歡
科普童話·神秘大偵探(2023年1期)2023-05-30 12:48:10
測控技術(2018年5期)2018-12-09 09:04:26
電子測試(2018年18期)2018-11-14 02:30:34
電信科學(2016年10期)2016-11-23 05:11:56
時代農機(2015年3期)2015-11-14 01:14:29
科技傳播(2015年20期)2015-03-25 08:20:30
信息安全研究(2015年3期)2015-02-28 20:18:12
西安航空學院學報(2014年5期)2014-07-13 01:27:52
家電科技(2014年5期)2014-04-16 03:11:28
汽車零部件(2014年2期)2014-03-11 17:46:27
