基于屏幕測量法的彎道照明試驗方法研究
2017-06-12 14:43:58譚功偉武華堂陳萍王丹讓松
汽車科技 2017年3期
關鍵詞:模式
譚功偉+武華堂+陳萍+王丹+讓松

摘 要:針對汽車彎道照明的現狀,討論了整車和零部件的測試標準,建立了整車試驗的數學模型,提出了在屏幕上進行整車彎道照明試驗,取得了近光轉動限值和實際轉動角度的計算公式,總結了燈具配光性能的試驗方法。采用樣車試驗結果對屏幕法進行驗證,結果表明該方法簡單有效,可作為檢測機構的試驗方法和主機廠評價的手段,同時分析了各種彎道照明模式的特點,從而為國內汽車彎道照明的設計提供幫助。
關鍵詞:彎道照明;模式; 配光性能; 明暗截止線; 屏幕
中圖分類號:U270.1+4 文獻標識碼:A 文章編號:1005-2550(2017)03-0074-06
Research on Test Method of Bend Lighting Based on Screen Measure
TAN Gong-wei, WU Hua-tang, CHEN Ping, WANG Dan, RANG Song
( National Automobile Quality Supervision Test Center (Xiangyang), Xiangyang441004, China )
Abstract: Based on the situation of bend lighting, the test standards of the vehicle and parts are discussed, found the mathematical model of the vehicle test, and puts forward the method of vehicle test with screen, obtain calculation formula of limit value and rotation Angle of practical, Summarizes the test method of photometric characteristics for lamps. Using the test results of the sample vehicle on the screen for validation, the results show that the screen method is simple and effective, can be used as evaluation means and test method for manufacturer, At the same time analyzed the characteristics of various kinds of bend lighting mode, thus it offers help for bend lighting design in China.
Key Words: Bend lighting; Mode; Photometric characteristics; Cut-off line; Screen
前 言
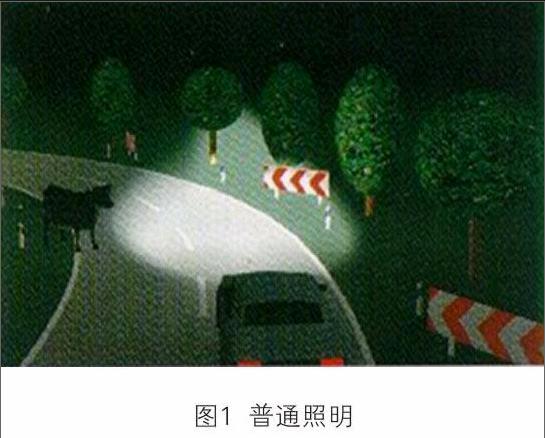
當夜間汽車在彎道上行駛時,常常會在彎道內側出現照明“盲區”,這種現象極大地影響了夜間的行車安全。隨著電子電氣技術的發展,汽車燈具越來越智能化,汽車彎道照明便應運而生,這一難題也就迎刃而解。彎道照明系統一般由車速傳感器、方向盤角度傳感器、電子控制單元(ECU)、驅動電機、前照燈等組成,通過CAN總線進行數據傳輸。當夜間彎道行車時,彎道照明功能能夠根據車速大小以及方向盤轉向角度的大小等信息,自動調整近光光束的照射方向,使之自動轉向彎道內側,或者通過點亮附加光源的方法,提高彎道內側的光照度,減少照明“盲區”,確保在彎道行車時的高能見度。如圖1所示為普通照明效果,由于彎道“盲區”的存在,駕駛員很難發現路邊的動物,當開啟彎道照明后,視野便得到了很大的改善,如圖2所示路邊的動物清晰可見。
1 彎道照明的模式
隨著彎道照明技術的發展和對成本的控制,從最初在D級車和C級車上使用,已經過渡到B級車并開始應用在A級車上,目前實現彎道照明有三種模式。
1.1 旋轉近光光束或水平移動明暗截止線轉折處。
本模式為一種動態的彎道照明,車載行車電腦根據實時車速、方向盤角度等多方面信息,通過電機驅動光源、反光鏡和透鏡等組件,使近光燈光束往彎道內側方向轉動,如圖3所示。由于大多數情況下轉動的角度非常小,因此需要一套非常精密的傳動控制機構,其設計、制造和維護成本都比較高。
1.2 移動前照燈的一個或多個光學部件,而明暗截止線轉折處在水平方向保持不動。
本模式與前一模式有點類似,但由于明暗截止線保持不動,因而視覺感不強,故較少采用。
1.3 增加一個光源,而明暗截止線轉折處在水平方向保持不動。
該附加光源一般位于主近光的外側,如圖4所示。本模式屬于一種靜態的彎道照明,設計上只需匹配好附加光源反光鏡的角度和點亮時機,不需要改變原來近光燈的結構,在不改變原來近光燈照射范圍的基礎上把彎內盲區也照亮,其設計、制造和維護成本都相對較低。
綜上所述,彎道照明為一種在彎道提供增強照明的照明功能,其實現載體為汽車前照燈。
2 標準要求及試驗方法
彎道照明在提高彎道內側方向照明的同時,還要考慮車輛前方的照明,并確保在提高本方駕駛員照明視野的同時不對對面來車駕駛員產生眩目,因此國標和ECE標準從整車上光束的移動位置和燈具的配光性能等方面都對彎道照明做了要求。
2.1 整車的標準要求及試驗方法
歐標ECE R48/06和國標GB 4785-2007《汽車及掛車外部照明和光信號裝置的安裝規定》對整車彎道照明的要求相同,故本文只介紹國標的內容。GB 4785-2007第4.3.2.7條:為了形成彎道照明,可以改變一只或兩只近光燈的水平方向,但是當移動整個光束或明暗截止線彎曲肘部時,明暗截止線彎曲肘部不得與離車輛前面的距離為相應近光燈安裝高度100倍的車輛重心軌跡相交;第4.3.2.8條:為了形成彎道照明,可以再打開一個位于近光燈中的或者與相應近光燈組合或混合的燈具(除遠光燈外)中的光源,但是車輛重心軌跡曲率水平半徑應不大于500m。
GB 4785-2007第4.3.2.8條在整車上其實只是電路連接上的要求,當在近光燈開啟的狀態下,車輛向左或向右轉彎時,只要能相應地打開向左或向右的附加光源即可,但當車輛的轉彎半徑增大至500 m時該附加光源不能被開啟,本條在整車上很容易驗證。
根據GB 4785-2007第4.3.2.7條,當彎道照明通過移動整個光束或明暗截止線彎曲肘部時,光束允許的移動量與近光燈的安裝高度和車輛重心軌跡有關,建立的數學模型如下圖5所示:
從圖5可以推導出,標準規定的近光光束旋轉角度極限可以通過公式(1)計算:
式中,α為車輛重心軌跡與100H相交時的角度(°);H為近光燈的安裝高度(m);R為車輛轉向半徑(m); 為弧度轉換成角度的系數。
車輛的轉向半徑與轉向輪的轉角以及車輛的軸距、輪距等有關。轉向輪的轉角越大,轉向半徑就越小;軸距、輪距越大,轉向半徑就越大。因為輪胎與地面的相互作用以及輪胎本身的變形、轉向產生的離心力等的影響,車輛平穩行駛的轉向半徑會隨著車速的變化而發生變化,同一輛車即使轉向輪轉角相同其轉向半徑也會隨車速的提高而增加。公式(1)得出的角度α值為標準規定的光束轉動最大臨界值,超過該值便會對對面來車駕駛員造成眩目,嚴重影響行車安全,考慮到要兼顧車輛前方的照明和安全性,實際上整車廠設計的彎道照明的旋轉角度都遠小于該值。
由于車輛在彎道上行駛時很難在路面上對移動中的光束進行追蹤測量,因此只能在試驗室對彎道照明進行模擬試驗。方法如下:將試驗車輛停放在足夠大的水平暗室內,方向盤轉角處于零位,齒輪變速箱處于空檔位置,松開駐車制動器;在近光燈基準中心前10m處放置一塊白色垂直屏幕,該屏幕與車輛縱向對稱平面垂直,屏幕寬8m高1.5m,在屏幕中間位置標出一條從上到下的中心線,盡量使車輛縱向對稱平面位于屏幕中心線上;測試過程中車輛掛空檔保持靜止,將發動機啟動并打開近光燈,將中性狀態下(彎道照明功能未被激活,下同)左右近光光束在屏幕上的明暗截止線拐點位置標記出來,通過廠家提供的控制軟件向車載行車電腦輸入每組車速和方向盤轉角信號,激活彎道照明功能后,在屏幕上用最小刻度為1mm的10m鋼卷尺測量每個狀態下左右近光燈光束明暗截止線拐點水平方向的移動量。近光光束實際的旋轉角度可通過公式(2)計算:
式中,θ為近光光束的旋轉角度(°);X為屏幕上光束明暗截止線拐點的水平移動量(mm);L為屏幕到近光燈基準中心的距離10000(mm); 為弧度轉換成角度的系數。該方法我們稱之為屏幕法。
2.2 零部件的標準要求及試驗方法
歐標ECE R112、R98、R123和國標GB 4599-2007《汽車用燈絲燈泡前照燈》、GB 25991-2010《汽車用LED前照燈》、GB 21259-2007《汽車用氣體放電光源前照燈》、GB/T 30036-2013《汽車用自適應前照明系統》等標準的配光性能都對彎道照明燈具提出了同樣的要求:如設計成提供彎道照明光束的前照燈,在中性狀態下進行配光性能測試后,還應對彎道照明功能進行配光性能測試,其結果均應符合標準要求。配光性能試驗可全部在燈具配光轉臺上進行。
當彎道照明光束通過旋轉近光光束或水平移動明暗截止線轉折處的方法獲得時,測量應在前照燈總成完成水平重新照準后進行。具體試驗方法為:中性狀態配光性能測試完后,利用廠家提供的控制器將彎道照明功能激活并使近光光束調整到向右或向左的極限位置,該極限位置對應車輛在這兩個方向上的最大旋轉角度的彎道照明,然后通過反方向水平調整配光轉臺重新照準后再進行配光性能測試,向右和向左的彎道照明功能均要進行測量,如圖6所示:
當彎道照明光束通過移動前照燈的一個或多個光學部件,而明暗截止線轉折處在水平方向保持不動的方法獲得時,配光性能測量應在這些光學部件位于極端操作位置時進行。具體試驗方法為:中性狀態配光性能測試完畢后,將光學部件移動至向右或向左的極限位置再進行配光性能測試,此時不再重新照準,向右和向左的彎道照明功能要分別測試,如圖7所示。
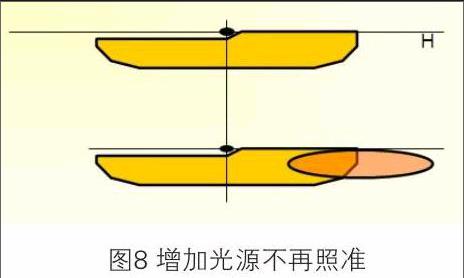
當彎道照明光束通過增加一個光源,而明暗截止線轉折處在水平方向保持不動的方法獲得時,測量應在該光源點亮時進行。具體試驗方法為:中性狀態配光性能測試完畢后,將附加光源打開后再進行配光性能測試,此時不再重新照準,如圖8所示:
由于燈具的彎道照明配光性能試驗只需要使用控制器激活彎道照明功能就可以在配光轉臺上完成測試,因此本文不再采用試驗結果進行驗證。
3 樣車試驗結果解析
某轎車通過屏幕法測量的整車彎道照明試驗結果見表1和表2。
通過分析試驗結果可知該車的彎道照明控制方法如下:當車速很低或方向盤轉角很小時,該車的彎道照明不啟動;同一車速下方向盤轉角越大車輛的轉向半徑就越小,光束的旋轉角度就越大,但光束旋轉角度增加到某個設定值后便不再隨轉向半徑的減小而繼續增加;同時相同工況下該車左右兩側近光燈的旋轉角度并不相同,表現為彎道內側近光燈的光束旋轉角度大,彎道外側近光燈的光束旋轉角度小,并且外側燈的旋轉角度正好是內側燈的一半,這樣設計的優點是在提高彎道內側照明的同時,還能確保彎道前方也有良好的照明;同樣是40km/h的車速、51°的方向盤轉角和72m的轉向半徑,往左轉和往右轉時近光燈的旋轉角度并不相同;考慮到左轉彎時對道路正面來車駕駛員的眩目控制,所以左轉彎模式下的控制點和采樣點更多。可見該車的彎道照明控制非常精細,是一種非常智能化的彎道照明模式,但設計復雜制造維護成本高是這種模式的最大劣勢。
從該樣車的試驗結果分析,屏幕法獲得的整車彎道照明光束旋轉角度的測量值與設計值的偏差都很小,這驗證了屏幕法不僅操作簡明扼要而且試驗數據準確,充分說明該方法簡單有效,目前該試驗方法已經獲得國內外行業專家的認可。
4 彎道照明方式的選擇
在平時的試驗工作中發現,絕大多數車輛的彎道照明方式并沒有上面案例中的樣車那么復雜,而是相對簡單,其近光的旋轉角度一般只與車輛的轉向半徑有關,并沒有和車速建立緊密的聯系,比如同樣在轉彎半徑為150m的彎道上40km/h和60km/h的車速下近光的旋轉角度相同;也有很多車并沒有考慮左轉彎和右轉彎的區別;有些車輛的彎道照明開啟時彎道內外側光束的旋轉角度是相同的;有些車輛的彎道照明開啟時只有彎道內側燈的光束移動而彎道外側燈的光束保持靜止;有些車輛的彎道照明通過開啟彎道內側的附加光源來實現;也有些車輛設計成在旋轉近光光束的同時還點亮彎道內側的附加光源,通過組合方式來實現彎道照明。
這都是一些實用的彎道照明方式,各種方式的彎道照明在設計、制造和維護上難度相差很大,實現成本也有很大的差別,要根據整車的市場定位來選擇合適的彎道照明控制方法,做到提升品質和考慮成本兩者兼顧,才能讓整車受到更多消費者的青睞。
5 結束語
汽車彎道照明對提高行車安全和駕駛員的舒適感有很大的幫助,對提升整車的科技感也有很好的視覺效果,隨著彎道照明的大量應用,必須從燈具的配光性能和整車試驗這兩方面來保證實際照明質量,從而確保既改善了本方照明的同時又不影響其他道路使用者,本文通過建立數學模型、推導計算公式和研究屏幕測試方法為整車彎道照明提供了一種簡單有效的試驗方法。
參考文獻:
[1]GB 4599-2007《汽車用燈絲燈泡前照燈》.
[2]GB 21259-2007《汽車用氣體放電光源前照燈》.
[3]GB 25991-2010《汽車用LED前照燈》.
[4]GB 4785-2007《汽車及掛車外部照明和光信號裝置的安裝規定》.
[5]GB/T 30036-2013《汽車用自適應前照明系統》.
[6]ECE R48/06. Uniform provisions concerning the approval of vehicles with regard to the installation of lighting and light-signalling devices.
[7]ECE R98. Uniform provisions concerning the approval of motor vehicle headlamps equipped with gas-discharge light sources.
[8]ECE R112. Uniform provisions concerning the approval of motor vehicle headlamps emitting an asymmetrical passing-beam or a driving-beam or both and equipped with filament lamps and/or light-emitting diode (LED) modules.
[9]ECE R123. Uniform provisions concerning the approval of adaptive front lighting systems (afs) for motor vehicles.
猜你喜歡
文藝生活·中旬刊(2016年10期)2016-11-04 03:40:25
人間(2016年26期)2016-11-03 17:07:19
中國科技博覽(2016年22期)2016-11-01 15:51:16
電影文學(2016年16期)2016-10-22 10:48:34
經營者(2016年12期)2016-10-21 08:06:21
現代經濟信息(2016年19期)2016-10-20 17:39:15
中國科技博覽(2016年19期)2016-10-19 12:30:02
電腦知識與技術(2016年21期)2016-10-18 22:37:20
商場現代化(2016年22期)2016-10-18 19:37:38
中國市場(2016年33期)2016-10-18 13:05:21
