光學遙感衛星雜散光掃描測試系統測控設計
2017-06-05 08:42:06李俊麟汪少林張黎明司孝龍馬文佳楊春燕李鑫劉輝李陽
航天器環境工程 2017年2期
關鍵詞:系統
李俊麟,汪少林,張黎明,司孝龍,馬文佳,楊春燕,李鑫,劉輝,李陽
?
光學遙感衛星雜散光掃描測試系統測控設計
李俊麟1,汪少林2,張黎明1,司孝龍1,馬文佳2,楊春燕2,李鑫1,劉輝1,李陽2
(1. 中國科學院合肥物質科學研究院安徽光學精密機械研究所通用光學定標與表征技術重點實驗室,合肥 230031;2. 上海衛星工程研究所,上海 200240)
文章介紹了一種光學遙感衛星雜散光掃描測試系統,用于發射前整星條件下對光學載荷雜散光抑制能力的模擬、分析及驗證測試。根據衛星的雜散光測試特點,對雜散光掃描測試系統進行了安全性、有序性、有效性、準確性、重現性、完整性和通信控制等測控設計,并推導了光束掃描子系統的控制方程。對雜散光掃描系統的控制準確性進行檢測,結果表明:光束掃描位置精度優于10mm,方位角精度優于0.2°,俯仰角精度優于0.1°。
光學載荷;雜散光;太陽模擬器;機器人;暗室
0 引言
光學遙感衛星在氣象、資源、海洋、環境與災害監測等領域有著重要的應用[1]。但是,該類衛星在軌運行過程中,其載荷光學相機極易受雜散光的影響,輕則降低相機傳感器信噪比,重則導致成像數據失效,甚至造成傳感器飽和、喪失成像能力[2]。在進行光學遙感相機設計時,一般都會根據衛星軌道和照相特點預先進行模擬、仿真,為光學系統設置相應的雜散光抑制措施,但這些模擬、仿真不能完全真實反映出相機的雜散光抑制能力。因此,國內外廣泛開展了空間環境模擬器的研究和建設,例如太陽模擬器等[3-5]。美國SS15B太陽模擬器的輻照面積可達6000mm,歐空局ESTEC太陽模擬器可達7000mm[6],日本NASDA太陽模擬器可達6000mm[7-8]。大型太陽模擬器雖然可以模擬太陽的照明情況,卻難以模擬光學遙感衛星全年在軌運行的被照情況,即要求光學遙感衛星與太陽光束之間存在姿態(光束方位角、俯仰角)的變化。
為了在地面真實模擬光學遙感衛星在軌運行的被照情況,驗證相機的雜散光抑制能力,預估相機的成像軌道和時間特點,建立了一套光學遙感衛星雜散光掃描測試系統。本文對該系統進行測控設計,以確保其安全性、姿態的準確性、測量結果的有效性、狀態參數記錄的完整性和重現性、運動機構的有序性。
1 系統測控設計
1.1 系統介紹
光學遙感衛星雜散光掃描測試系統主要包括太陽模擬器、光束掃描子系統和消光子系統3部分。
太陽模擬器光源使用了4只7kW短弧氙燈,采用方陣排布、水平點燃的照明方式。主要由氙燈光源、橢球聚光鏡、輔鏡(消色差)、勻光積分器(場鏡和投影鏡,元素鏡為方形)、可變光闌、準直鏡,以及輔助散熱和裝調等機構組成,如圖1所示。太陽模擬器的主要性能指標見表1。
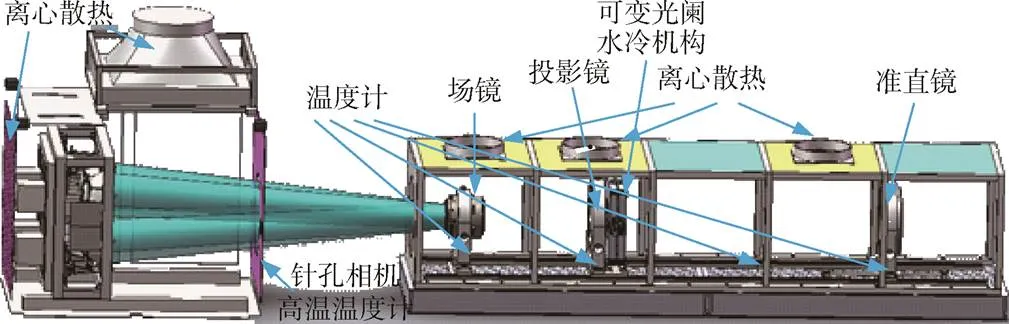
圖1 氙燈太陽模擬器光學系統
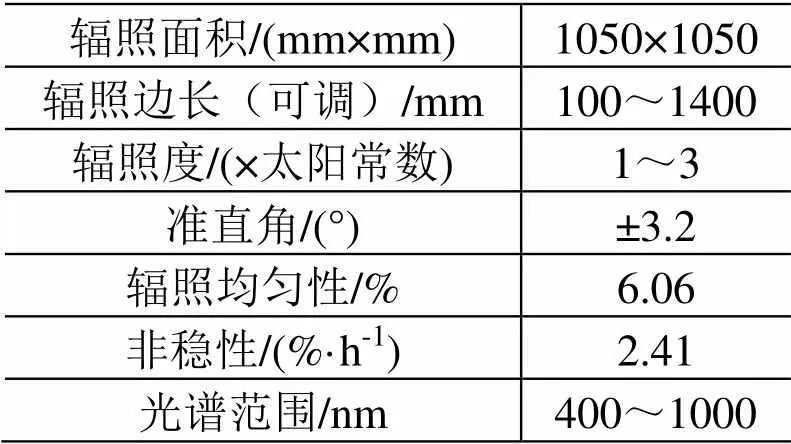
表1 太陽模擬器主要性能指標
光束掃描子系統包括太陽模擬器光束折反指向鏡的2維轉動、掃描鏡的7維掃描運動和被測光學遙感衛星的簡單1維水平轉動共10維運動機構。其中,掃描鏡的7維掃描采用7維大型機器人完成,與指向鏡的2維轉動一起,采用曲面模型約束掃描鏡中心的位置,構建太陽模擬器光束的投射位置和姿態;而光學遙感衛星的簡單1維水平轉動主要用于輔助構建光束相對于衛星對地面的方位角。
7維大型機器人(ABB IRB6650S-125/3.5)是光束掃描子系統的關鍵部件,運動范圍最遠可達3500mm,最大負載125kg,其手臂各部分臂長和豎直運動范圍如圖2所示(從下至上依次為1~6關節)。該型機器人各個關節的轉動范圍如表2所示,機器人可以靈活構建掃描鏡的位置和姿態,實現太陽模擬器的光束掃描,模擬光學遙感衛星在軌全年被照條件的變化[9-10]。

圖2 ABB IRB6650S-125/3.5臂長及豎直運動范圍

表2 IRB6650S-125/3.5機器人6關節的轉動范圍
消光子系統是雜散光掃描測試系統的保障性建設部分,用于模擬相機成像極黑目標和構建空間模擬暗室,以消除衛星雜散光測試過程相機視場內和環境中的直接反射、二次反射、耦合反射等雜散光。3種消光措施包括:通過消光材料特性增加吸收、降低反射率,鏡面反射至無關方向,以及多次反射降低總反射率。極黑目標和空間模擬暗室采用中國科學院安徽光學精密機械研究所研制的反射率低于1.5%(400~1600nm)的消光材料,極黑目標結構如圖3所示。

圖3 極黑目標模擬器結構
1.2 測控設計
1)安全性設計
光學遙感衛星雜散光測試系統使用了大量強電設備,如大功率太陽模擬器(4×7kW氙燈),屬于火源性隱患;此外,光束掃描子系統使用的大型機器人的運動過程不僅可能導致夾持的掃描鏡與自身機械臂發生碰撞,也可能在掃描過程中碰撞衛星,屬于運動型干涉源。雜散光測試光束掃描過程中,太陽模擬器1~3倍太陽常數的能量有可能直接投射進相機視場,其高能光束可能使相機失去成像能力。因此,必須全面考慮該雜散光掃描測試過程中的安全性,并給予有效保障。
為了極大程度降低太陽模擬器大量產熱的危害性,在盡可能提高有效能量(400~1000nm)收集能力的情況下(增大氙燈橢球聚光鏡包容角),通過橢球鏡鍍膜處理消除或最大程度降低長波光的反射,從而降低發熱對光學系統和暗室環境的危害。而且,如圖1所示,在太陽模擬器光學系統各關鍵位置還設置了離心散熱風機和水冷機構,進一步降低了發熱對光學系統組件和環境的危害。此外,不僅在光學系統和暗室關鍵位置進行溫度監測,還對大功率氙燈和冷卻裝置等關鍵部件進行工作狀態(電流、電壓、功率)監測,以便及時發現、上報和處理可能的危險。
2)有序性設計
光學遙感衛星雜散光掃描測試系統有序性設計指根據系統掃描控制方程(參見第1.3節),有機組合光束掃描子系統各個機構有序運動,完成光束指向和位置的掃描,避免發生碰撞和光束直接投射進相機視場。
光束掃描設計過程消除了衛星的復雜運動而僅進行一維簡單旋轉以輔助構建掃描光束的方位角,為進一步減少其運動,在測試流程中先改變光束的俯仰角和位置,再降低衛星的轉動頻率和速度。另外,為減小2維指向鏡扭矩以及避免先開啟太陽模擬器后控制運動機構等誤操作可能造成的危害,在未測試的情況下指向鏡方位角(與太陽模擬器光束夾角)和俯仰角(與水平面夾角)最好分別設置為45°和為0°。
7維大型機器人是光束掃描子系統中危害性最大的運動機構。為兼顧避免光束直接投射進相機視場,光束掃描子系統各個運動機構的控制順序設計為:首先轉動衛星完成光束方位角輔助定位;而后指向鏡2轉動機構同時運動,完成光束折反;7維機器人的運動步驟為4、5、6關節轉至安全位置—平移臺及1、2、3關節完成定位—4、5、6關節完成定位。
機器人夾持的掃描鏡及其基座共重約100kg,慣量較大,需要以較小的加速度進行控制,以保持掃描機構平穩運動,并長期維持掃描精度。此外,ABB IRB6650S-125/3.5機器人的運動速度是由控制點位置決定的,因此,當控制點接近目標位置而姿態相差較大時,機器人會為滿足距離運動的時間要求設置較小的運動速度,控制點緩慢移動,但個別關節會為調整姿態偏差而發生大幅、快速翻轉。這種現象對掃描的穩定性和安全性極為不利,因此在運動過程中必須刻意避免控制點距目標位置較近而距目標姿態較遠的情況。
3)有效性設計
光學遙感衛星雜散光測試的目的在于,在整星條件下模擬驗證光學相機在軌全年的雜散光抑制能力,分析成像軌道和時間特點,必須排除其他干擾源的影響。為此,專門研制了制冷組件,模擬相機傳感器在軌工作的溫度環境;并在太陽模擬器光源處設計了針孔相機以監測光源的穩定性;同時,在空間模擬暗室中設計5處低照度檢測器以同步測量暗室的雜散光水平。
通過相機傳感器工作溫度環境的模擬和對光源穩定性、暗室雜散光的監測,以及消光子系統的極黑成像模擬目標和空間模擬暗室,排除了雜散光測試過程的其他干擾因素,確保雜散光測試結果的有效性,真實反映衛星光學系統自身的雜散光抑制能力。
4)準確性設計
光學遙感衛星雜散光掃描測試系統之所以能夠模擬衛星在軌運行全年的被照情況、分析衛星成像的軌道和時間特點,在于其能夠通過光束掃描子系統的掃描使得太陽模擬器光束完全覆蓋衛星對地面,并且光束相對于衛星對地面的指向變化相當于其在軌時的太陽照明幾何條件。這就必須首先準確仿真出衛星在軌運行的太陽照明幾何條件,然后通過光束掃描子系統予以真實、準確的再現。
因此,光學遙感衛星雜散光掃描測試系統準確性設計包括衛星在軌運行太陽照明幾何條件的準確仿真和光束掃描子系統各個運動機構的準確控制。前者通過專業的軟件進行軌道仿真,能夠保證其準確性;后者的關鍵在于準確建立光束掃描子系統運動機構的控制方程,準確測量各個機構之間的相對關系,準確修正安置誤差,詳見1.3節。
5)重現性、完整性設計
太陽同步軌道衛星在軌運行1年的太陽照明情況變化較大;為了確保安全,雜散光測試衛星的成像數據處理與光學遙感衛星雜散光掃描測試系統的測控是相對獨立的2部分,單獨控制。因此,雜散光測試時產生的大量數據難以實時予以處理、分析。
針對事后數據處理、分析的情況,為增強事實依據、降低重復試驗的概率,特別為光學遙感衛星雜散光掃描測試系統進行了重現性和完整性設計。前者通過在關鍵位置安裝高清微光攝像機,對重要位置進行視頻記錄;后者通過光學遙感衛星雜散光掃描測試系統測控軟件完整記錄太陽模擬器和暗室及其輔助裝置的工作狀態,包括太陽模擬器的穩定性、功率、各處溫度以及暗室內的雜散光水平等。
在后期衛星成像數據處理過程中,可以通過光學遙感衛星雜散光掃描測試系統測控軟件專門的數據回放功能根據時間軸調用、查看當時雜散光掃描測試系統的工作狀態,為分析員提供判據。
6)通信控制設計
光學遙感衛星雜散光掃描測試系統占地約18m×15m×8m,除了光束掃描子系統各個運動機構需要進行有序控制之外,太陽模擬器和空間模擬暗室中還有大量的狀態監測設備需要實時進行狀態記錄和處理。
由于需要控制或測量的設備數量和種類較多且距離較遠,普通的電腦不僅接口數量有限,接口種類的擴展性也較差,所以光學遙感衛星雜散光掃描測試系統采用工控機,并將所有RS232通信方式的設備和儀器進行RS232/RS485轉換,以提高數據傳輸的距離和可靠性,同時上位機采用了MOXA CP-138U PCI串口擴展卡,可以方便地設置成RS485和RS422傳輸。特別為針孔相機設計了1394PCIe接口管理光源穩定性監視數據。除此之外,還設計了以太網通信接口進行測量、控制。系統接口類型如圖4所示。

圖4 光學遙感衛星雜散光掃描測試系統接口
光學遙感衛星雜散光掃描測試系統測控軟件采用C#語言開發,主要包括3個功能模塊。1)調試功能模塊:所有的控制、測量功能都可以在該模塊下單獨進行,方便設備調試以及僅僅關注系統部分能力時的個別設備單獨控制或測量;2)測試功能模塊:即系統雜散光測試過程使用的模塊,所有運動、測量設備經由軟件統一控制、自動處理;3)數據回放功能模塊:針對衛星雜散光測試數據事后處理的情況而設計的功能模塊,可以根據時間軸查詢指定時間的太陽模擬器、空間模擬暗室和光束掃描子系統的狀態。
經過測控設計后,光學遙感衛星雜散光掃描測試系統的俯視圖如圖5所示。
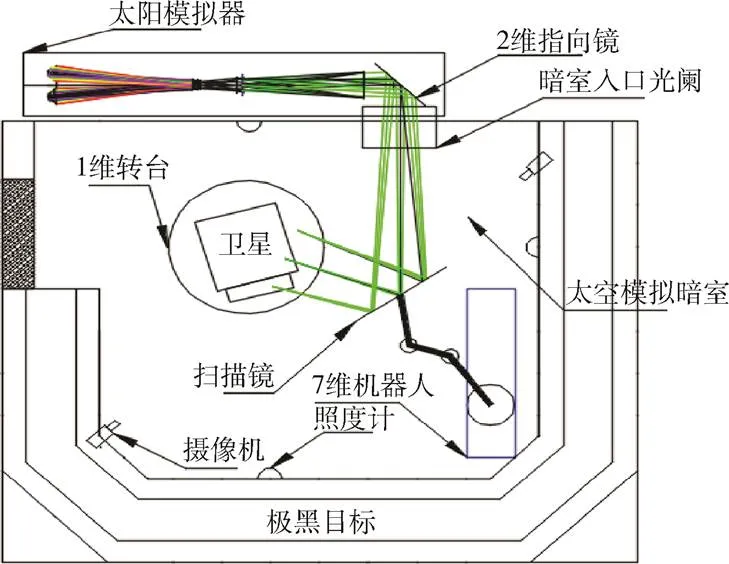
圖5 光學遙感衛星雜散光掃描測試系統
1.3 控制方程
為了描述光束掃描子系統的控制方程,首先需要建立統一的基準坐標系統,對太陽模擬器坐標系、2維指向鏡轉動控制坐標系、7維掃描鏡控制坐標系及1維光學遙感衛星被測對地面非坐標軸轉動控制坐標系進行有機綜合,形成有序的運動、測試流程,模擬衛星在軌全年被照情況。
光學遙感衛星雜散光掃描測試系統光束掃描以實驗室坐標系作為基準進行綜合控制,以方形代表光學遙感衛星,該系統各個關鍵部件的坐標系定義如圖6所示。

圖6 坐標系統
圖中未畫出的、軸由右手定則確定,所有坐標系的原點均位于機器人J2軸所在高度的水平面內,也是太陽模擬器主光軸所在的水平面。測試的衛星對地面與衛星水平轉動軸并不重合,而掃描光束的方位角、俯仰角都是基于對地面,因此需將基于對地面的掃描位置和姿態變換到基準實驗室坐標系下表示。
該系統掃描控制方程根據掃描中心和光束方位角、俯仰角確定光束掃描系統總計10維運動機構的位置和姿態。可以分2步實現,首先根據掃描中心和光束的方位角、俯仰角確定指向鏡、掃描鏡的位置和姿態,然后根據指向鏡、掃描鏡的位置和姿態分別確定指向鏡2維轉臺的各自角度、機器人各關節的角度和平移臺的位置。
光束掃描子系統和光學遙感衛星共計使用了10維運動組件,其富余運動維度提高了運動控制的靈活性,也增加了唯一控制的復雜性。為確保掃描控制的唯一性,須對一些運動形式進行約束。7維掃描鏡運動機構機器人的運動最復雜,通常對掃描鏡中心點進行約束,使其始終在某個面內運動,如平面、球面或拋物面等,這里使用平面進行約束,并規定光學遙感衛星一維轉動輔助完成方位角構建。
光學遙感衛星在實際安裝或設計中可能存在被測面與轉動半徑不垂直,被測面與豎直面不平行等情況,如圖7所示(表示對地面與轉動半徑垂直的弦之間的夾角,表示對地面與豎直面之間的夾角)。由于掃描位置和掃描光束方位角、俯仰角都是基于對地面,而衛星轉動是基于豎直轉軸,所以非理想對地面需要進行相應的校正,通過基準實驗室坐標系統一控制掃描光束。

圖7 非理想被測面
基于對地面坐標系掃描中心為(sc,sc,sc),方位角、俯仰角為(,)的掃描光束的單位矢量可表示為
in=-(coscos, cossin, sin)。 (1)
規定衛星的一維簡單轉動輔助構建太陽模擬器掃描光束的方位角,其控制方程為
=。 (2)
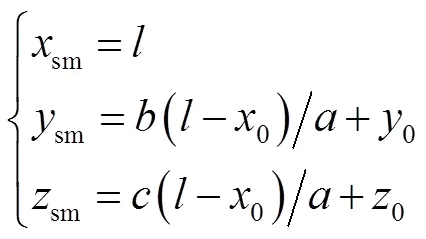
實驗室坐標系下對地面上的掃描點和光束矢量隨著衛星的轉動而轉動,設7維掃描鏡的掃描中心位于=l上,修正非理想被測面,則7維機器人實驗室坐標系下的位置控制方程為
令2維指向鏡轉動中心為(fm,fm,fm) ,則指向鏡2維轉動控制方程為
式中:fm和fm表示2維指向鏡的控制角度;fm=(fm,fm,fm)表示指向鏡法向單位矢量,通過歸一化三角關系獲得
fm=Norm(fm–fm), (5)
其中fm、fm=(sm–fm,sm–fm,sm–fm)分別表示基于指向鏡的入射、反射光線矢量。同理,掃描鏡的單位法向矢量為
sm=Norm(sm–sm), (6)
式中sm=fm、sm=(sc–sm,sc–sm,sc–sm)分別表示基于掃描鏡的入射、反射光線矢量。令(a,a,a)=sm為掃描鏡鏡面坐標系的軸,并設其軸始終處于水平面內,則掃描鏡軸
根據右手定則確定掃描鏡鏡面坐標系的軸(O,O,O)。如果7維機器人的姿態采用四元數表示,則7維機器人的姿態控制方程為
。 (8)
其中sign(q)表示元素的符號。
2 準確性檢測與討論
根據準確性設計,光學遙感衛星雜散光掃描測試系統的準確性包括軌道仿真的準確性,以及光束掃描子系統各個機構的準確控制、相互關系的準確測量、安置誤差的準確修正。軌道仿真通過專業軟件完成,是雜散光掃描測試的輸入幾何條件,可認為是準確無誤的;其他項的準確性則通過光束掃描位置和姿態綜合表現(統稱為控制準確性)。為檢測該系統的控制準確性,在太陽模擬器投影鏡處設置“×”形標志,在衛星位置安置一臺精度5″的全站儀,如圖8所示。使太陽模擬器光束按設定方位角和俯仰角掃描,通過全站儀觀測標志的像,確定光束實際方位角和俯仰角。

圖8 光束掃描子系統準確性測試
目標值和觀測結果如表3和表4所示,可以看出,方位角和俯仰角掃描精度分別可達0.2°和0.1°。通過對光學遙感衛星雜散光掃描測試系統光束掃描子系統極限掃描角度的測試,方位角掃描范圍為-90°~90°,俯仰角掃描范圍為-29°~42.5°,可對1700mm(,可更大)×2700mm()的表面進行掃描。此外,使用細光束激光進行掃描位置確認時發現存在<10mm的固定偏差。
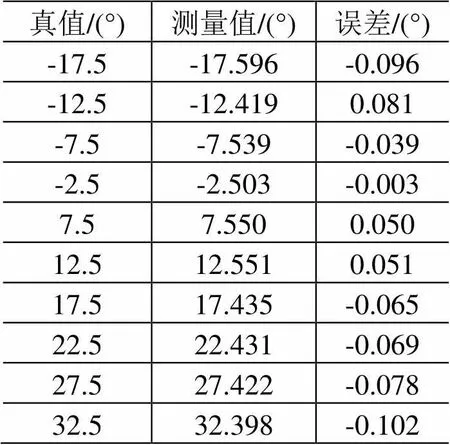
表3 俯仰角觀測結果

表4 方位角測試結果
控制準確性是光束掃描子系統各個運動機構自身精度、聯合運行、誤差修正精度的綜合表現,由于使用了高精度的運動執行機構,掃描機構的自身精度可以得到保障。掃描光線方位角誤差的平均值為-0.113°、俯仰角誤差的平均值為0.023°,說明測量時除了隨機觀測誤差(黑暗環境引起較大隨機觀測誤差)外還存在系統誤差。掃描位置偏差表現為固定值,亦說明存在系統誤差。光線指向和位置存在系統誤差說明光束掃描機構之間的安置關系測量存在誤差,或運動控制過程的誤差修正并不徹底。進一步提高控制準確性需要采用更高精度的測量方式測量光束掃描子系統各個運動機構之間的安置關系,并采取更加充分、詳細的誤差修正處理辦法。
3 結束語
光學遙感衛星雜散光掃描測試系統由于具有光束掃描的能力,并配備極黑模擬目標和空間環境模擬暗室,可以在地面模擬衛星在軌運行全年的被照情況,驗證、評估光學相機的雜散光抑制能力,分析其成像軌道和時間特點。
本文針對光學遙感衛星雜散光測試的特點,對雜散光掃描測試系統進行了安全性、有序性、有效性、準確性、重現性、完整性和通信控制等測控設計,確保衛星雜散光測量過程安全、準確,測試結果有效,數據分析判據充分。經過準確性檢測,光束掃描位置精度優于10mm,方位角精度優于0.2°,俯仰角精度優于0.1°,具有較高的控制準確性。
(References)
[1] 岳濤. 中國航天光學遙感技術成就與展望[J]. 航天返回與遙感, 2008, 29(3): 10-19
YUE T. The achievements and future prospects of chinese space optical remote sensing technology[J]. Spacecraft Recovery & Remote Sensing, 2008, 29(3): 10-19
[2] 石榮寶. 微小衛星空間遙感相機的雜散光分析、測量和遮光系統設計[D]. 江蘇: 蘇州大學, 2010: 1
[3] EDDY R. Design and construction of JPL SSL5B solar simulator[R]. JPL internal document, 1968-01
[4] 張容, 李竑松, 向艷紅. KFTA太陽模擬器研制[J]. 航天器環境工程, 2009, 26(6): 548-554
ZHANG R, LI H S, XIANG Y H. Development of KFTA solar simulator[J]. Spacecraft Environment Engineering, 2009, 26(6): 548-554
[5] 楊林華, 范寧, 史瑞良. KM6太陽模擬器拼接式準直鏡的裝校技術[J]. 航天器環境工程, 2005, 22(6): 342-346
YANG L H, FAN N, SHI R L. Adjustment method for collima ting mirror of km6 solar simulator[J]. Spacecraft Environment Engineering, 2005, 22(6): 342-346
[6] BRINKMAN P W. Main characteristics of the large space simulator at ESA/ESTEC[C]//LLS(II), 13thSSC, 1984: 30-51
[7] NAUKAMURA Y, TOMITA T. 13m diameter space simulation test facility: ESA SP 304[R], 1990-09: 107-112
[8] 楊林華. 大型太陽模擬器研制技術綜述[J]. 航天器環境工程, 2012, 29(2): 173-178
YANG L H.Large solar simulator development technologies[J]. Spacecraft Environment Engineering, 2012, 29(2): 173-178
[9] Product specification IRB 6650S[G]. ABB, 2014: 14
[10] Product manual IRB 6650S[G]. ABB, 2014: 46
(編輯:馮露漪)
Design of measurement and control for stray light scanning test system of optical remote sensing satellite
LI Junlin1, WANG Shaolin2, ZHANG Liming1, SI Xiaolong1, MA Wenjia2, YANG Chunyan2,LI Xin1, LIU Hui1, LI Yang2
(1. Key Laboratory of Optical Calibration and Characterization, Anhui Institute of Optics and Fine Mechanics, Hefei Institutes of Physical Science, Chinese Academy of Sciences, Hefei 230031, China;2. Shanghai Satellite Engineering Research Institute, Shanghai 200240, China)
This paper presents a stray light scanning test system for the optical remote sensing satellite to simulate, analyze and validate the optical load’s stray light suppression before launch. According to the characteristics of the stray light test of the satellite, the stray light scanning system is designed with regard to the safety, the sequence, the effectiveness, the accuracy, the repeatability, the integrity and the communication control, meanwhile the control equation for the beam scanning subsystem is deduced. From the control precision measurements of the stray light scanning system, the positional accuracy is better than 10mm, the azimuth angle accuracy is better than 0.2°, and the pitch angle accuracy is better than 0.1°.
optical payload; stray light; solar simulator; robot; dark room
V524.2; V416.8
A
1673-1379(2017)02-0195-07
10.3969/j.issn.1673-1379.2017.02.015
2016-10-09;
2017-03-09
李俊麟(1985—),男,博士學位,主要從事遙感相機輻射和幾何綜合定標方面的研究。E-mail: lijunlin@aiofm.ac.cn。
http://www.bisee.ac.cn
E-mail: htqhjgc@126.com
Tel: (010)68116407, 68116408, 68116544
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
