考慮吊鉤組升降的伸縮臂起重機動力學模型研究
2017-06-01 11:35:29鄭宇鋒,王殿龍
大連理工大學學報 2017年3期
關鍵詞:模型
鄭 宇 鋒, 王 殿 龍
( 大連理工大學 機械工程學院, 遼寧 大連 116024 )
考慮吊鉤組升降的伸縮臂起重機動力學模型研究
鄭 宇 鋒, 王 殿 龍*
( 大連理工大學 機械工程學院, 遼寧 大連 116024 )
建立了一種模擬伸縮臂起重機轉臺回轉,吊臂變幅、伸縮,吊鉤升降的運動學、動力學模型.利用光滑連續的正余弦函數描述伸縮臂起重機的運動,使用拉格朗日方法列出吊鉤組的動力學方程,并用時變約束方程描述吊鉤鋼絲繩的升降長度,最終組成微分代數方程,使用約束穩定化方法進行求解.通過算例驗證了伸縮臂起重機動力學模型的正確性.該模型可以為伸縮臂起重機的復合動作控制研究及虛擬吊裝方案設計提供參考.
伸縮臂起重機運動學模型;伸縮臂起重機動力學模型;吊鉤組升降
0 引 言
起重機作為一種工程機械,在搬運重物過程中起著重要的作用,在保證工作效率的同時,提高工作過程的安全性顯得尤為重要.由于起重機臂頭與吊鉤之間的鋼絲繩具有柔性以及吊鉤的升降運動,造成被吊物的擺動,影響其就位精度,降低了工作效率及安全性.根據不同的起重機類型,建立全面準確的動力學模型進行重物偏擺性研究很有意義.
長期以來,起重機的運動偏擺方面的研究主要有使用通用軟件進行的動力學仿真研究[1-4]、推導公式的動力學模型研究[5-11],為偏擺的控制提供了參考.考慮重物升降過程的研究基于靜力學[12]方法或是二維模型[13-14],但是同時反映伸縮臂起重機轉臺回轉,吊臂變幅、伸縮,重物升降三維空間的復合運動模型的研究[15]尚未見到.本文從伸縮臂起重機(以下簡稱起重機)實際工程特點出發,建立考慮被吊物升降運動的起重機動力學模型.該模型方程簡潔,易于求解,能夠反映起重機復合運動的特征,便于實際工程運動控制研究以及更真實的三維虛擬吊裝操作研究.
1 起重機運動學及動力學研究
帶吊鉤組的起重機動力學模型需要考慮3部分運動:(1)起重機吊臂運動,主要包含轉臺回轉、吊臂變幅、吊臂伸縮運動;(2)吊鉤組升降運動,體現為卷揚卷起或放松鋼絲繩引起的吊鉤組高度變化運動;(3)吊鉤組及被吊物擺動,體現為吊鉤組及被吊物圍繞著起重機臂頭的擺動.
1.1 起重機吊臂運動
被吊物的垂直移動高度和水平位置變化主要由起重機的臂頭位置決定.起重機臂頭位置是通過轉臺回轉、吊臂變幅、吊臂伸縮3種運動獲得的.
起重機由下車車架、轉臺及配重架、吊臂、吊鉤組構成.起重機吊臂運動學模型如圖1所示,O點為起重機回轉平臺中心,A點為吊臂根部與轉臺連接處,B點為吊臂頭部,C點為吊鉤點,D點為變幅油缸與轉臺連接處,E為轉臺配重架.Oxyz為全局坐標系.轉臺及其配重架EAOD可繞y軸轉動,轉動角度用α表示.伸縮吊臂ABB′可在EAOD平面內變幅,變幅角度用β表示,沿著吊臂方向的伸縮BB′用s1表示.B′C為鋼絲繩.至此,可用變量α、β、s1分別描述整個起重機系統的回轉運動、變幅運動、伸縮運動狀態.

圖1 起重機吊臂運動學模型
回轉運動描述如下:
r′Aα=TαrA
(1)
r′Bα=TαrB
(2)
其中rA為A點初始時刻在全局坐標系中的矢量,r′Aα為A點轉動α后在全局坐標系中的矢量;rB為B點初始時刻在全局坐標系中的矢量,r′Bα為B點轉動α后在全局坐標系中的矢量;Tα為轉動α的坐標變換方向余弦矩陣.
(3)
式(2)對時間求一階導數及二階導數得回轉運動引起B點的速度及加速度分別為
r.′Bα=0α.0?è?????÷÷÷×r′Bα

(4)
(5)
變幅運動描述如下:
r′Bβ=Tβ(rB-rA)+rA
(6)
其中r′Bβ為B點變幅β后在全局坐標系中的矢量;Tβ為變幅β的坐標變換方向余弦矩陣.由歐拉轉動定理可得:
(7)

(8)
式(6)對時間求一階導數及二階導數得變幅運動引起B點的速度及加速度分別為
r.′Bβ=(rB-rA)×0β.0?è?????÷÷÷×rArA?è?????÷÷÷
(9)
(10)
伸縮運動描述如下:
(11)
式(11)對時間求一階導數及二階導數得伸縮運動引起B點的速度及加速度分別為

r.′Bs=rB-rArB-rAs.1

(12)
(13)
如果伸縮臂為多節臂,根據所需要的不同臂節長度,各節臂的相對伸縮運動先后順序,仍可以用以上方法進行描述.
1.2 吊鉤組升降運動
吊鉤組包括吊鉤及其動滑輪組.吊鉤上的被吊物垂直移動高度除了由起重機的臂頭決定外,還與起升鋼絲繩的放下或收起長度有關,即與起重機臂頭到吊鉤鉤口的長度有關.
被吊物升降運動學模型如圖2所示.F點為起升鋼絲繩卷揚放置點,FB′為卷揚至臂頭的鋼絲繩,B′C為臂頭至吊鉤的鋼絲繩初始長度,CC′為鋼絲繩升降(或被吊物升降)的長度.工作過程是F點卷揚卷動放松或收緊鋼絲繩,改變臂頭B′的靜滑輪組至吊鉤C處的動滑輪組之間的鋼絲繩長度從而使吊鉤及重物產生升降.B′C段鋼絲繩長度用l1表示,CC′段距離用s2表示.
記鋼絲繩垂直長度為
l=l1+s2
(14)
對應的繩長運動速度函數及加速度函數為

l.
=
s.
2
(15)

l..
=
s..
2
(16)
鋼絲繩升降的長度s2也可以用卷揚的卷動長度s′2來描述:
(17)
其中k是臂頭靜滑輪組的倍率,描述卷揚放收繩速度與吊鉤升降速度的倍數關系,從而可以推出以卷揚卷動速度和加速度描述的繩長運動速度和加速度.

圖2 被吊物升降運動學模型
1.3 吊鉤組及被吊物動力學模型
起重機吊載動力學模型如圖3所示.該模型中忽略鋼絲繩的質量,m為被吊物質量,忽略吊鉤中心到被吊物質心的距離,即假設它們是重合的.以x、y、z來描述重物的空間位置.
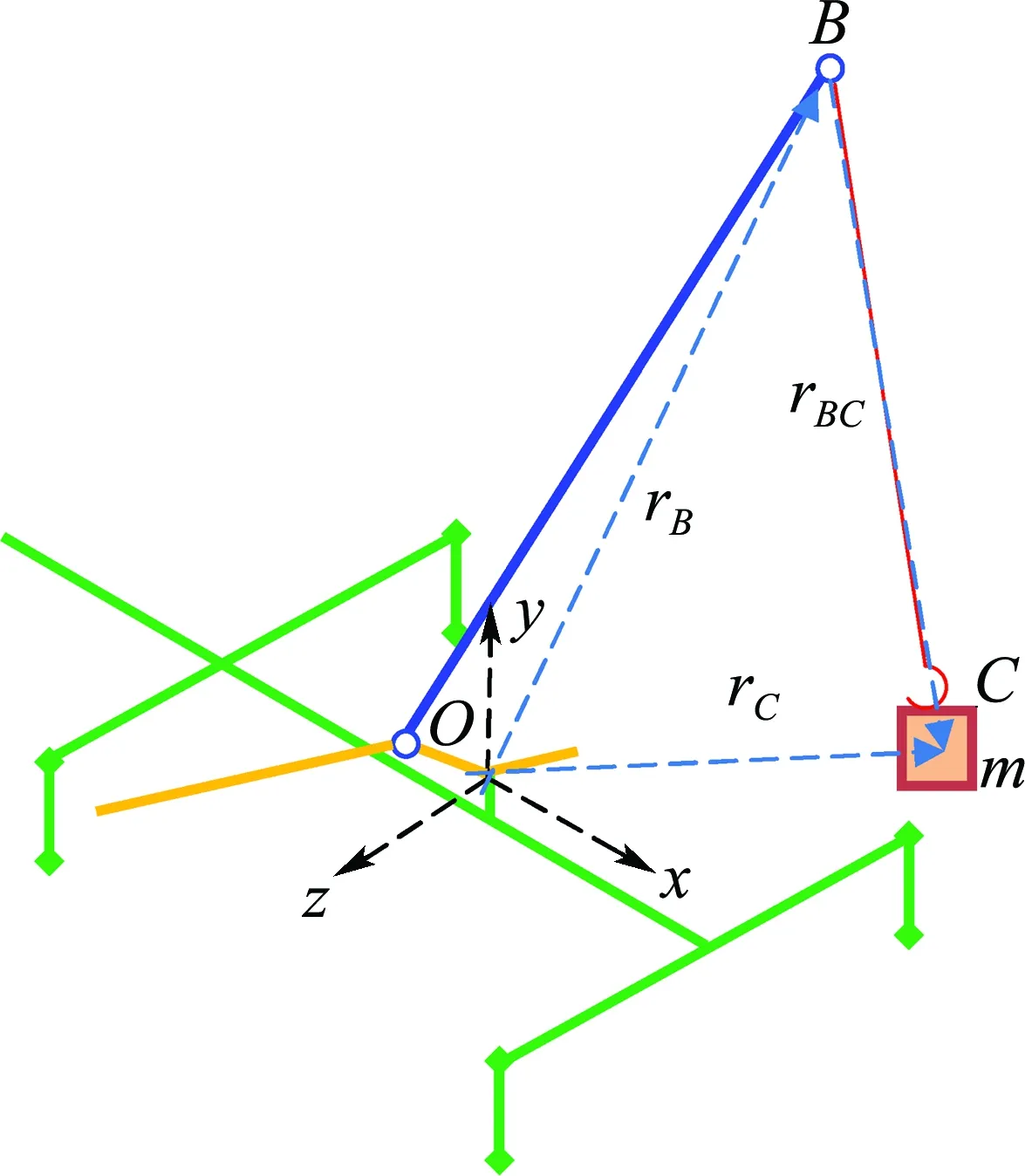
圖3 起重機吊載動力學模型
根據拉格朗日動力學,有

L=12m(x.2+y.2+z.2)+12mgy
(18)
記q=(xyz)T,即q為廣義坐標,則動力學方程為

ddt(dLdq)-dLdq.=Q
(19)
其中Q是廣義力.如果僅考慮y方向的重力,則有Q=(0 -mg0)T.由式(18)、(19)可推出動力學方程:
m000m000m?è?????÷÷÷x..y..z..?è?????÷÷÷=0-mg0?è?????÷÷÷
(20)
記為

q..
=
F
(21)

M=m000m000m?è?????÷÷÷,q..=(x.. y.. z..)T,F=(0-mg 0)T.
其中由式(20)、(21)可知,質量m可以約去,即被吊物的運動與質量無關.
由臂頭到吊鉤重物處的距離列出的距離約束方程
Φ=(x-x0)2+(y-y0)2+(z-z0)2-l2=0
(22)
可與式(21)組成微分代數方程.當吊鉤組鋼絲繩長l為時變函數時,該微分代數方程即為考慮吊鉤組升降的起重機動力學方程.微分代數方程不能直接求解,通常把約束方程進行二階求導再聯立原動力學方程求解.
為方便后面推導,把約束方程(22)轉換為

(23)
約束方程(23)對廣義坐標q分別求偏導數組成矩陣
(24)
Φq即雅可比矩陣.雅可比矩陣對時間求導數得速度約束方程:
(25)
式(25)對時間求導數得加速度約束方程:
(26)
由此,約束方程(22)可轉變為式(26),微分代數方程轉變為式(27)并可用約束穩定化方法進行求解.
(27)
其中λ為拉氏乘子,為約束方程的約束力;ξ為約束穩定化項:
(28)
選擇合理的穩定系數α′和β′即可獲得對式(27)較好的數值積分結果.
1.4 光滑運動學函數
從力學的角度來說,吊載運動的起重機系統可簡化為7個自由度的多剛體動力學模型:轉臺回轉,吊臂變幅、伸縮,鋼絲繩升降,重物的三維空間擺動.根據研究目的,可進行相應簡化處理.
起重機的吊載作業過程是一個安全性要求很高的過程,要求重物運動平穩.因此,要求起重機的運動如轉臺回轉,吊臂變幅、伸縮,盡量光滑穩定.這些運動驅動的位移運動曲線、速度運動曲線可近似如圖4所示.


(a) 位移

(b) 速度
圖4 運動曲線
Fig.4 Motion curves
圖中s為運動達到的位移,v為運動達到的速度.運動由t1時刻開始,到t4時刻結束.t1~t2為加速啟動階段,t2~t3為勻速運動階段,t3~t4為減速停止階段.加速階段和減速階段經歷時間可以不相同.這些運動過程可以用3個階段的位移連續函數表示:
(29)
式(29)位移函數對時間求一階導數可得速度函數:
(30)
2 算例及應用
以QAY500t起重機為例進行動力學模型的算例驗證.轉臺逆時針回轉一周同時吊鉤組進行正弦先升后降的混合動作仿真,將距離約束方程約束效果與機械系統動力學分析軟件ADAMS的分析結果對比進行驗證.
起重機尺寸參數:主臂A點坐標A(x,y,z)=(-1.5,1.0,0) m,主臂基本臂長16.1 m,二節臂伸出11.3 m.
位姿基本參數:吊臂變幅角度β=60°,轉臺回轉角度α=0°~360°.
回轉驅動參數:t1=0 s,t2=1.25 s,t3=15.00 s,t4=16.25 s,v=24°/s.
求解方法及參數:Runge-Kutta法,步長0.001 s,穩定系數α′=100、β′=200,輸出動畫視圖100幀.
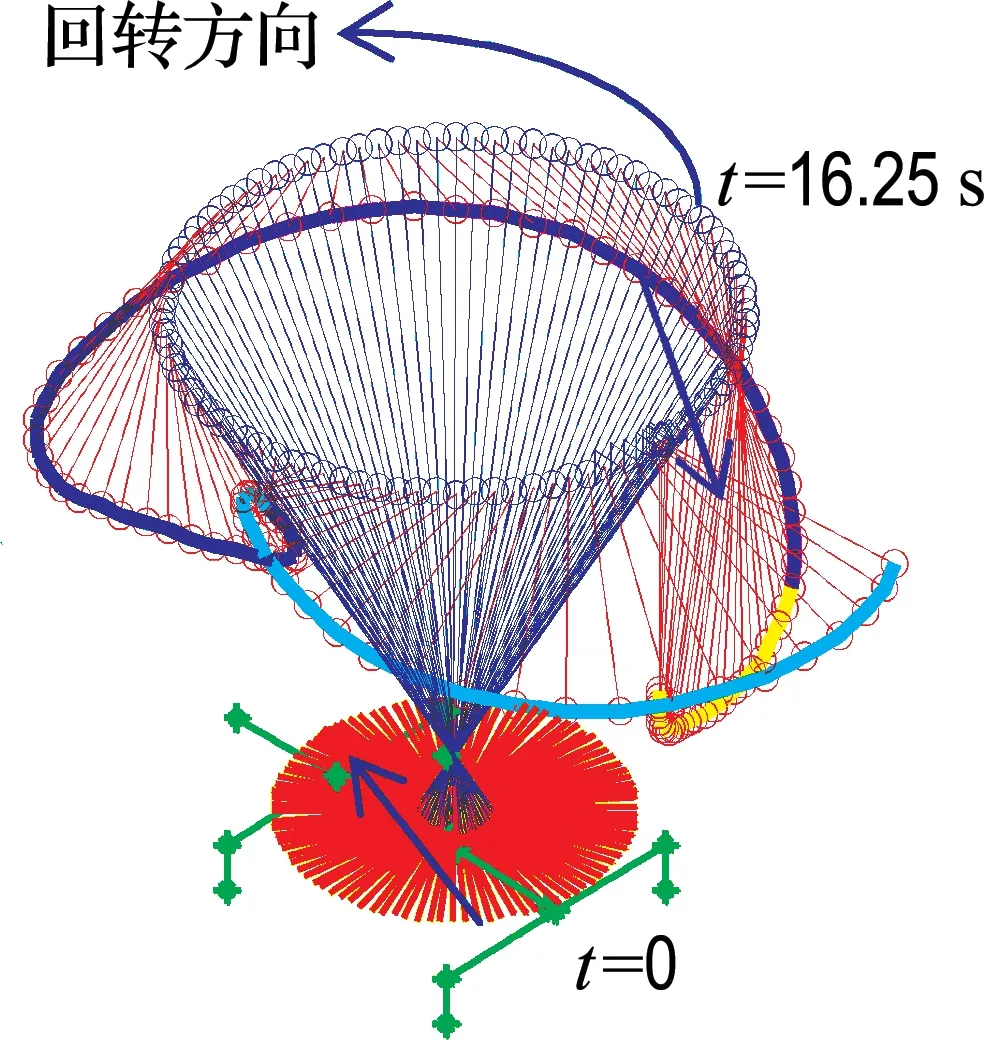
由動畫輸出視圖5、6可知,本文算法結果和ADAMS結果非常一致.在起重機逆時針回轉運動過程中,吊鉤組的運動是一個跟隨臂頭轉動、離心運動的過程.在前半時間段α=0°~180°,吊鉤組是一個由靜止到運動的跟隨臂頭的過程,該過程吊鉤組在離心力的作用下向外擺.在后半時間段α=180°~360°,吊鉤組的運動先超前于臂頭的運動,直至繩長最短,然后吊鉤組才滯后于臂頭的運動,在最后時刻當臂頭靜止時,被吊物在慣性作用下仍向前擺動.
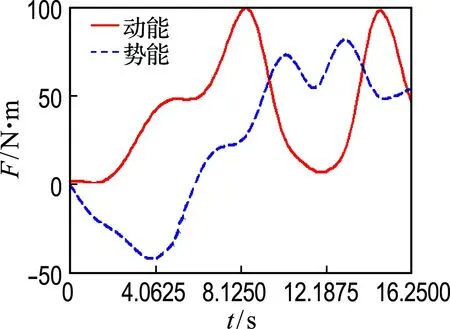
由圖7的吊鉤組(質量為1 kg)動能和勢能曲線可知,本文算法的計算結果和ADAMS的計算結果是一樣的.由動能曲線可知,前半周期,轉臺回轉增加了吊鉤組的動能,同時吊鉤組鋼絲繩變長,勢能也轉變為動能,因此曲線有遞增趨勢.在后半周期t=12 s時,由于吊鉤組鋼絲繩收至最短,勢能增加,動能減少.由勢能曲線可知,吊鉤組進行的是先放繩下降后收繩上升的正弦運動,所以勢能曲線與正弦曲線趨勢基本一致.
(a) 三向視圖

(b) 頂視圖

圖6 ADAMS的起重機動畫輸出三向視圖
由圖8的吊鉤鋼絲繩約束反力曲線可知,本文算法的計算結果和ADAMS的計算結果趨勢和大小相同.在運動開始時,鋼絲繩受力為1 kg吊鉤組的重力9.8 N.在之后的過程中隨著吊鉤組的來回擺動,曲線振蕩變化,大多處于離心運動狀態,受力大于9.8 N.
以上算例的吊鉤組偏擺量很大,目的是為了體現起重機復合動作以及使吊鉤組升降效果更明顯.實際起重機的運動動作時間更長更緩慢些,偏擺角度需要控制在3°以內.如以下是根據真實的控制時間計算:仿真吊完荷載之后需要進行轉臺順時針回轉到起始位置,把起升鋼絲繩收短,吊臂縮回,變幅角度β=0°.圖9的3個動畫視圖體現了3種不同運動控制過程,其中圖9(a)為先回轉運動再卷揚收起升繩,最后縮臂并變幅至水平位置,吊鉤組擺動量最大為0.220 m;圖9(b)為先卷揚收起升繩再回轉,最后縮臂并變幅至水平位置,吊鉤組擺動量最小為0.017 m;圖9(c)為先同時回轉與卷揚收繩,然后伸縮臂縮回,最后變幅至水平位置,吊鉤組最大擺動量與圖9(a)相同為0.220 m,回轉收繩同步,最省時.在實際應用中,可根據吊載安裝的要求,先進行計算分析,在保證施工安全的同時,選擇省時高效的運動控制方案.

(a) 本文算法
(b) ADAMS
圖7 吊鉤組動能和勢能曲線
Fig.7 The kinetic and potential energy curves of hook assembly

(a) 本文算法

(b) ADAMS
圖8 吊鉤鋼絲繩約束反力曲線
Fig.8 Hook lifting rope constraint force curves

(a) 運動1

(b) 運動2

(c) 運動3
圖9 3種不同運動控制過程的視圖
Fig.9 The views of three different motion control processes
3 結 語
本文建立了伸縮臂起重機的運動學模型以及吊鉤組升降的動力學模型.起重機的轉臺回轉,吊臂變幅、伸縮,吊鉤組升降運動均用連續的正余弦函數描述,保證了位移、速度、加速度運動的連續性.利用拉格朗日動力學方法列出了吊鉤組的動力學方程,并用時變長度約束函數描述了起重機臂頭至吊鉤組的距離,結合約束穩定化方法求解該微分代數方程.最后通過算例的計算驗證了動力學方程的正確性.該動力學模型可用于研究起重機的轉臺回轉,吊臂變幅、伸縮,吊鉤組升降的單一運動或混合運動,并根據被吊物的擺動效果調整驅動方案以獲得最優的平穩控制方案.在未來的研究中,考慮吊臂變形的影響會得到更真實的計算結果.
[1] 胡曉光,隋允康,丁克勤,等. 基于虛擬樣機技術的門式起重機動力學仿真分析[J]. 科技導報, 2010, 28(2):39-45.
HU Xiaoguang, SUI Yunkang, DING Keqin,etal. Dynamic simulation of gantry crane based on virtual prototype technology [J]. Science & Technology Review, 2010, 28(2):39-45. (in Chinese)
[2] 席瑞萍,高崇仁. 基于ADAMS的塔式起重機動力學仿真[J]. 中國重型裝備, 2009(4):1-3.
XI Ruiping, GAO Chongren. The dynamics simulation of tower crane based on ADAMS [J]. China Heavy Equipment, 2009(4):1-3. (in Chinese)
[3] 張玉琴,馮山嶺,張淑紅. 橋式起重機的動力學模型與仿真計算[J]. 重型機械科技, 2005(3):1-4, 43.
ZHANG Yuqin, FENG Shanling, ZHANG Shuhong. The kinetic model and simulation calculation of the bridge crane [J]. Heavy Machinery Science and Technology, 2005(3):1-4, 43. (in Chinese)
[4] 嘉紅霞,李萬莉,SINGHOSE W. 考慮臂架彈性的動臂起重機動力學建模及振動分析[J]. 振動與沖擊, 2010, 29(12):136-140.
JIA Hongxia, LI Wanli, SINGHOSE W. Dynamic modeling and vibration analysis of cherry pickers with flexible arms [J]. Journal of Vibration and Shock, 2010, 29(12):136-140. (in Chinese)
[5] 王幫峰,張瑞芳,張國忠. 回轉起重機吊重擺振的動力學模型與控制[J]. 中國機械工程, 2001, 12(11):1214-1217.
WANG Bangfeng, ZHANG Ruifang, ZHANG Guozhong. Dynamic model and control of slewing crane load sway [J]. China Mechanical Engineering, 2001, 12(11):1214-1217. (in Chinese)
[6] 董明曉,劉偉民. 回轉塔式起重機動力學模型及時滯控制研究[J]. 應用基礎與工程科學學報, 2005(S1):70-75.
DONG Mingxiao, LIU Weimin. Research on modeling and time-delay control of rotary tower cranes [J]. Journal of Basic Science and Engineering, 2005(S1):70-75. (in Chinese)
[7] 楊 超. 全地面起重機塔臂工況吊重擺振特性研究[D]. 大連:大連理工大學, 2013.
YANG Chao. The influence of slewing motion on the mechanics property of main boom for all [D]. Dalian: Dalian University of Technology, 2013. (in Chinese)
[8] 薛 偉,郭永娟. 林用起重機起吊木捆偏擺系統的動力學模型與仿真[J]. 東北林業大學學報, 2011, 39(6):87-89.
XUE Wei, GUO Yongjuan. Dynamic model and simulation of lifting log bundle deflection systems for cranes in forestry [J]. Journal of Northeast Forestry University, 2011, 39(6):87-89. (in Chinese)
[9] MIJAILOVIC′ R. Modelling the dynamic behaviour of the truck-crane [J]. Transport, 2011, 26(4):410-417.
[10] MALEKI E, SINGHOSE W. Dynamics and control of a small-scale boom crane [J]. Journal of Computational and Nonlinear Dynamics, 2011, 6(3):031015.
[11] MOUSTAFA K A F, EBEID A M. Nonlinear modeling and control of overhead crane load sway [J]. Journal of Dynamic Systems, Measurement and Control, Transactions of the ASME, 1988, 110(3):266-271.
[12] 宋 軼. 核電站環行起重機吊鉤組升降垂線偏差分析[D]. 大連:大連理工大學, 2013.
SONG Yi. Analysis of hoisting vertical deflection of hook block of polar crane for nuclear power plant [D]. Dalian:Dalian University of Technology, 2013. (in Chinese)
[13] 田紅亮. 非定長吊臂非定長系物繩固定旋轉起重機的動力學模型[J]. 機械強度, 2008, 30(1):20-23.
TIAN Hongliang. Dynamical model of the fixed rotating crane with non-constant length of boom and cable [J]. Journal of Mechanical Strength, 2008, 30(1):20-23. (in Chinese)
[14] 王幫峰,張國忠. 液壓履帶起重機工作裝置的機器人動力學模型[J]. 機械科學與技術, 2001, 20(5):684-686.
WANG Bangfeng, ZHANG Guozhong. Robotic dynamic model on the working device of hydraulic crawler crane [J]. Mechanical Science and Technology, 2001, 20(5):684-686. (in Chinese)
[15] ABDEL-RAHMAN E M, NAYFEH A H, MASOUD Z N. Dynamics and control of cranes: A review [J]. Journal of Vibration and Control, 2003, 9(7):863-908.
Study of dynamic model of telescopic crane with a lifting and pulling load movement
ZHENG Yufeng, WANG Dianlong*
( School of Mechanical Engineering, Dalian University of Technology, Dalian 116024, China )
Kinematic and dynamic models are established, which can be used to simulate telescopic crane turntable slewing, boom luffing and telescoping, hook lifting and pulling. The joint motion of telescopic crane can be described by smooth continuous sine cosine function, and the dynamic equations of hook assembly are derived by Lagrange method. The lifting and pulling length of hook wirerope is described by a time-variant algebraic constraint equation. The dynamic equations and the constraint equation form differential algebraic equations which can be solved by constraint stabilization method. The correctness of the telescopic crane dynamic model is verified through an example. This model can provide information for the research on compound motion control and lifting scheme design of telescopic crane in the virtual reality.
telescopic crane kinematic model; telescopic crane dynamic model; lifting and pulling load movement
1000-8608(2017)03-0259-07
2016-09-06;
2017-01-15.
鄭宇鋒(1984-),男,博士生,E-mail:fengfanmilan@163.com;王殿龍*(1962-),男,教授,博士生導師,E-mail:dlwang@dlut.edu.cn.
TH2;TB122
A
10.7511/dllgxb201703007
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
