基于五桿機構的注射式免耕播種成穴軌跡分析與參數求解
2017-05-25 08:00:37劉宏新改廣偉相斌斌
農業工程學報 2017年8期
劉宏新,王 盼,改廣偉,相斌斌
?
基于五桿機構的注射式免耕播種成穴軌跡分析與參數求解
劉宏新,王 盼,改廣偉,相斌斌
(東北農業大學工程學院,哈爾濱,150030)
針對特殊軌跡要求進行機構分析與參數求解,為注射式免耕播種模式的實施奠定基礎。軌跡形成機構基于五桿機構設計,在建立機構數學模型的基礎上,分析雙曲柄等速五桿機構的存在條件及空間約束;給定成穴點相對軌跡的可行域,利用CATIA(computer aided three-dimensional interactive application)進行參數化建模、運動仿真及軌跡繪制;運用軌跡區域定位法,研究成穴器端點的區域軌跡分布特性;運用數值循環比較法,研究參數對軌跡的影響規律,結合約束條件,求得對應不同株距的結構調整參數與作業參數組合,可形成251.2~344.7 mm豎直方向的有效作業軌跡。樣機試驗及高速影像分析表明,基于五桿的免耕播種軌跡形成機構能夠在秸稈高度還田的情況下帶動成穴器完成打穴作業,能有效穿透秸稈并按要求成穴,刮帶現象少。研究也證實了軌跡區域定位與數值循環比較法相結合可有效提高五桿機構參數組合求解的效率,為實現大長短軸比的類橢圓形軌跡的五桿機構參數的求解提供有效的方法。
農業裝備;農業機械;播種;免耕播種;注射式;五桿機構;軌跡區域定位;數值循環比較
0 引 言
為增強農業的可持續發展能力,保護性耕作在中國得到廣泛重視。保護性耕作采用免耕、少耕及殘留秸稈覆蓋地表的方式對農田進行播種,不僅可以降耗,減少作業成本,還有利于保水保墑,提高土壤肥力和抗旱能力[1-3]。免耕播種作為保護性耕作的四大內容之一,是實施保護性耕作各項的關鍵技術。現有的免耕播種機為保證種子的順利下播,一種方法是采用圓盤切刀切斷秸稈(根茬),切開覆蓋層,開出縫隙,從而方便作業部件順利通過,這種方式顯然增加了功耗,同時對垂直載荷要求較大,當破茬不完全時,可能從土壤中帶出整個殘茬,影響播種質量[4],并且對切割部件要求較高,當秸稈量大時易發生纏繞堵塞。另一種方式是將秸稈層移除,清理出無覆蓋層的播種條帶,清秸覆秸的過程會消耗一定功耗,同時在土壤硬度小于18.2 kg/cm2,濕度小于35%的條件下,隨著切茬深度的增加,土壤擾動量急劇增大,會揚起土壤,引起環境污染[5-7]。
針對上述問題,提出一種注射式免耕精密播種方式,采用特定運動軌跡成形機構帶動成穴器穿透地表覆蓋物(秸稈)進行打穴播種,無需對秸稈殘茬進行任何處理,對土壤擾動小、作業工序少、功耗低、可靠性高、適應性好。
目前采用類似運動軌跡及動作過程的農業機械主要有插秧機、液態施肥機[8]和適用于覆膜的穴播機。插秧機分插機構為保證秧苗的直立度,避免傷秧、倒秧及搭橋現象,較好的秧針相對運動軌跡為“腰子形”或“海豚形”[9-10];現有的液態施肥機為達到溝痕寬度小,深度滿足不同作物需求的目的,其橢圓齒輪行星系扎穴機構噴肥針的相對軌跡為“腰子形”[11-12];覆膜穴播機分為滾輪式和垂直插入式,在工作時需保證穴口的大小及深度,避免撕膜[13-17],其相對軌跡均為圓形。
但是,對于有秸稈殘茬覆蓋的復雜地表,成穴機構需要在豎直方向具有大有效行程,以同時滿足能夠穿透足夠厚度的覆蓋物、避免刮帶、擾動小等多種良好成穴條件,上述現有的機構均不符合要求。因此,設計一種大有效行程專用軌跡形成機構是實現注射式免耕播種的前提,同時為大行程類橢圓形相對軌跡成形機構的參數求解探索一套行之有效的流程和方法。
1 成穴軌跡分析與機構選擇
1.1 成穴軌跡分析
成穴機構應可穿透較厚秸稈且不刮帶秸稈,其成穴器端點理想的絕對運動軌跡如圖1a所示,該軌跡由成穴器端點相對機架的相對運動軌跡與機具水平方向運動軌跡的合成,本文將其定義為“門字形”軌跡。為滿足免耕的農藝要求和作業環境,其有效行程(高度)1越大越好,且繞扣最大橫弦長越小越好,為繞扣交點高度。
選擇類橢圓作為目標相對軌跡,通過調整機構參數,改變形成類橢圓的長軸或短軸以滿足絕對軌跡參數要求。類橢圓相對軌跡及其絕對軌跡如圖1b所示。
1.2 機構選擇
五桿是具有多自由度最簡單的機構,機構相對穩定,具有較多的尺寸和相位角參數、不同的驅動方式及傳動比,可實現豐富的曲線軌跡,因此采用五桿機構作為成穴軌跡的形成機構[18]。
對于五桿機構參數的求解,當前主要采用解析法與軟件相結合的方法。馬良等由ADAMS(automatic dynamic analysis of mechanical systems)軟件建立參數化模型,尋求連架桿輸出軌跡的改變規律[19];方芳借助于計算機輔助設計的方法,研制了齒輪五桿機構的軌跡曲線生成系統[20];陶軍等經過仿真和試驗驗證了圖解法與解析法相結合是確定齒輪五桿機構實現預定軌跡的有效方法[21]。
以上研究均為在給出五桿機構參數的前提下,研究軌跡的形成規律。但對于本文所面對的問題中,機構的參數組合是要解決的首要問題。
研究方案為在建立數學模型的基礎上,給定成穴端點相對軌跡的可行域,結合CATIA機械設計模塊、知識工程模塊與數字樣機模塊,對機構進行參數化建模、運動仿真及軌跡繪制,尋求區域軌跡特性,并研究各參數對軌跡的影響規律,結合目標函數的取值范圍求解機構參數,并給出求解流程及方法,以滿足穴式免耕播種的要求。
1.3 工作原理與結構分析
由于安裝空間存在一定限制,同時需確保機構結構緊湊,因此合理的設計五桿機構各參數,使其在滿足軌跡要求的基礎上盡可能減小五桿機構所占的安裝空間是實現成穴免耕播種的關鍵。
1.3.1 工作原理
五桿成穴機構示意圖如圖2所示,為便于機構的實際應用,設置雙曲柄的傳動比為1,即本文主要針對等速雙曲柄五桿機構進行研究。BC桿與AE桿為原動件,以相同轉速同向轉動,進而帶動連桿CD、DE轉動,DF與連桿CD夾角固定并在其帶動下進行成穴。
1.3.2 結構分析
以A點為坐標原點,水平方向為軸,豎直方向為軸,建立直角坐標系,如圖2所示,此時AE桿處于水平方向。
本設計的五桿機構屬于雙曲柄型,只有選取合適的尺寸參數才能使機構形成完整封閉的連桿曲線。對于五桿機構,其各參數必須滿足一定的基本約束條件[22-27]。
1)雙曲柄存在條件
為使機構可以整周運轉,并且得到相應軌跡,需要使兩曲柄同時滿足曲柄存在的條件。
BC成為曲柄的條件:

EA為曲柄的條件為:
(2)
兩桿同時為曲柄條件:

其中:
2)死點不存在條件
為避免死點,在機構運動過程中,C、D、E三點應始終構成封閉三角形,須滿足以下條件:

3)最小傳動角
傳動角越大,對機構的傳力越有利。為保證機構傳力性能良好,應使最小傳動角min≥40o,五桿機構的傳動角為兩連桿之間的銳角[18]。當機構處于最小傳動角時,可得:

2 軌跡區域分布特性與變化規律
2.1 空間約束
為保證機構在整機安裝及作業時與其他機構不發生干涉、碰撞,將機構布置為空間結構,其空間限制如圖3所示。
1)1為機架高度。為保證作業時種子順利從種箱落入成穴機構,將種箱放置在機架上方,要求機構所能達到的最高位置C'小于機架的高度,由圖3可知,機架高度需滿足如下公式
1=+5+1+(6)
式中為機構最高點位置距離機架的高度,mm。
2)為A點距離地面的高度。為保證機具具有良好的通過性,要求
≥4+1(7)
式中1為秸稈殘茬高度,mm。
3)3為播種深度。本文針對不同農作物,播深取值范圍為30~50 mm[28]。
4)為成穴端點F與A點的初始水平距離。在成穴過程中,要求該值在一定范圍內越小越好。在1、4長度不變的情況下,可通過調節2和3的長度使兩連桿間的夾角變大以減小。
根據市場上一般播種機機架的高度,設定本文機架高度1=820 mm,依據田間秸稈殘茬的平均高度[29],取1≤300 mm,0<<10 mm,結合基本約束條件并分析可得如下公式
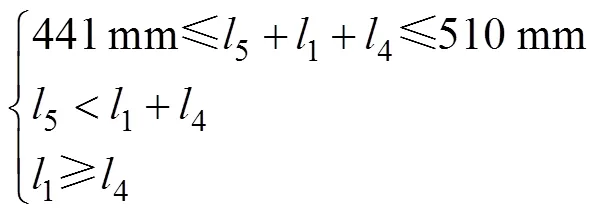
(9)
5)1、2為F點相對軌跡可行域的長度與高度。
2=+3(10)
2.2 參數化建模
零件參數化建模是指將零件模型中的關鍵參數變量化,通過參數的修改使零件模型產生特征聯動,實現幾何模型的修改[30]。
利用CATIA機械設計模塊,對成穴機構進行建模與約束創建[31]。對于該機構,需要求解滿足要求的參數組合,即五桿各桿件長度及曲柄的初始相位角。利用知識工程模塊,對機構進行參數化設計,分別在零件和裝配體中對各零件進行參數化,并將各參數進行發布,建立同一參數在零件和裝配體中的關聯性,便于直接在裝配體結構樹中更改相應參數實現機構的快速改變與更新。為方便研究參數對軌跡的影響規律,在建模時,以直線代替各桿件,利用CATIA數字樣機模塊對機構進行運動仿真與軌跡繪制[32]。
據參考文獻[33-35]可知,1與4、2與3兩組數值的簡諧波分別相似,同時改變組內數值大小,對軌跡的形狀無明顯影響,只會改變軌跡的大小和位置。
根據可實現類橢圓形四桿機構的參數[35]及上述約束條件初定五桿成穴機構參數值為:1=130 mm,2=200 mm,3=200 mm,4=130 mm,5=207 mm,6=500 mm,3=150°,機構參數化模型如圖4所示。
圖4中,“BC桿”、“EA桿”為曲柄,“CD桿”、“DE桿”為連桿,“ganding5”、“ganding6”及“ganding7”分別為輔助點1、2和輔助線,用于輔助五桿機構沿水平方向的直線運動;“ganding5”與“ganding6”分別為一點。
其中,BC桿分別與輔助點1和CD桿旋轉接合,EA桿分別與輔助點2和DE桿旋轉接合,CD桿和EA桿旋轉接合,輔助點1、2分別和輔助線棱形接合(棱形接合為移動副),設定輔助點1、輔助點2與曲柄BC、EA之間的旋轉結合以及與“輔助線”的棱形結合為驅動命令,將“輔助線”設定為固定零件。并通過“公式”命令建立驅動命令的法線,便于使用法則曲線進行模擬。
2.3 軌跡區域定位
篇章格律論是對Halliday銜接理論的補充與延展,它將Halliday等從語法角度提出的句子層面以上非結構性銜接理論補充、擴展至超越小句的語篇層面,關注語篇的旋律,為我們從結構上對語篇銜接進行分析提供了新的有效手段。
通過模擬仿真發現,在其他參數不變的前提下,當DF與CD的夾角3取值不同時,軌跡的形狀、大小及位置都會發生改變,區域內各位置軌跡特性如圖5所示。
根據軌跡長軸與水平方向的夾角,將軌跡分為3個區域。以區域2中軌跡為基準進行分析,區域1中軌跡向左傾斜,且長軸與短軸比值較小,另結合實際成穴位置,區域1中的軌跡不符合要求;區域2中軌跡長軸方向與水平方向近似垂直,且長軸與短軸比值較大;區域3中軌跡向右傾斜,整體呈縮小趨勢。
為方便調整機構參數且滿足“3.1”中軌跡可行域的要求,選定區域2中的軌跡特性為目標。
理論條件下3只需滿足五桿成穴機構軌跡在區域2即可,但由于成穴機構需在有秸稈殘茬覆蓋的地表進行成穴,3不同,機構對秸稈殘茬穿透能力和擾動情況不同,因此3的取值規律需根據后文的實際試驗進行確定。
2.4 相對軌跡的變化規律分析
2.4.1 桿件長度對相對軌跡的影響規律
1與4、2與3兩組數值的簡諧波分別相似,因此可通過控制三組桿件長度參數(1與4、2與3和5)觀察桿件長度對相對軌跡的影響規律,表1為3組桿件長度參數分別變化時相對軌跡參數,圖6為3組桿件長度參數分別變化時相對軌跡參數對應的位置關系。
綜上所述,可得出以下規律:
1)在1=4的前提下,同步改變其大小,軌跡中心點不變,軌跡大小隨1增大(減小)而增大(減小);
2)在2=3的前提下,同步改變其大小,軌跡中心點隨2增大(減小)而斜向上(斜向下)偏移,軌跡大小隨2增大(減小)而增大(減小);
3)只改變5,軌跡中心點隨5增大(減小)而向下(向上)偏移,軌跡大小變化無特定規律。
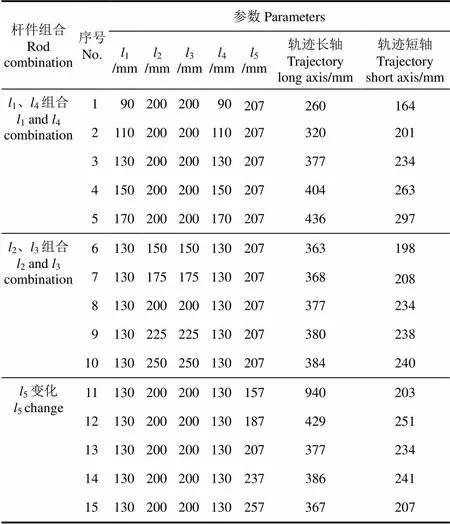
表1 三組桿件長度變化時相對軌跡參數
注(Note):6=500 mm,3=150°,1=-26°,2=0°。
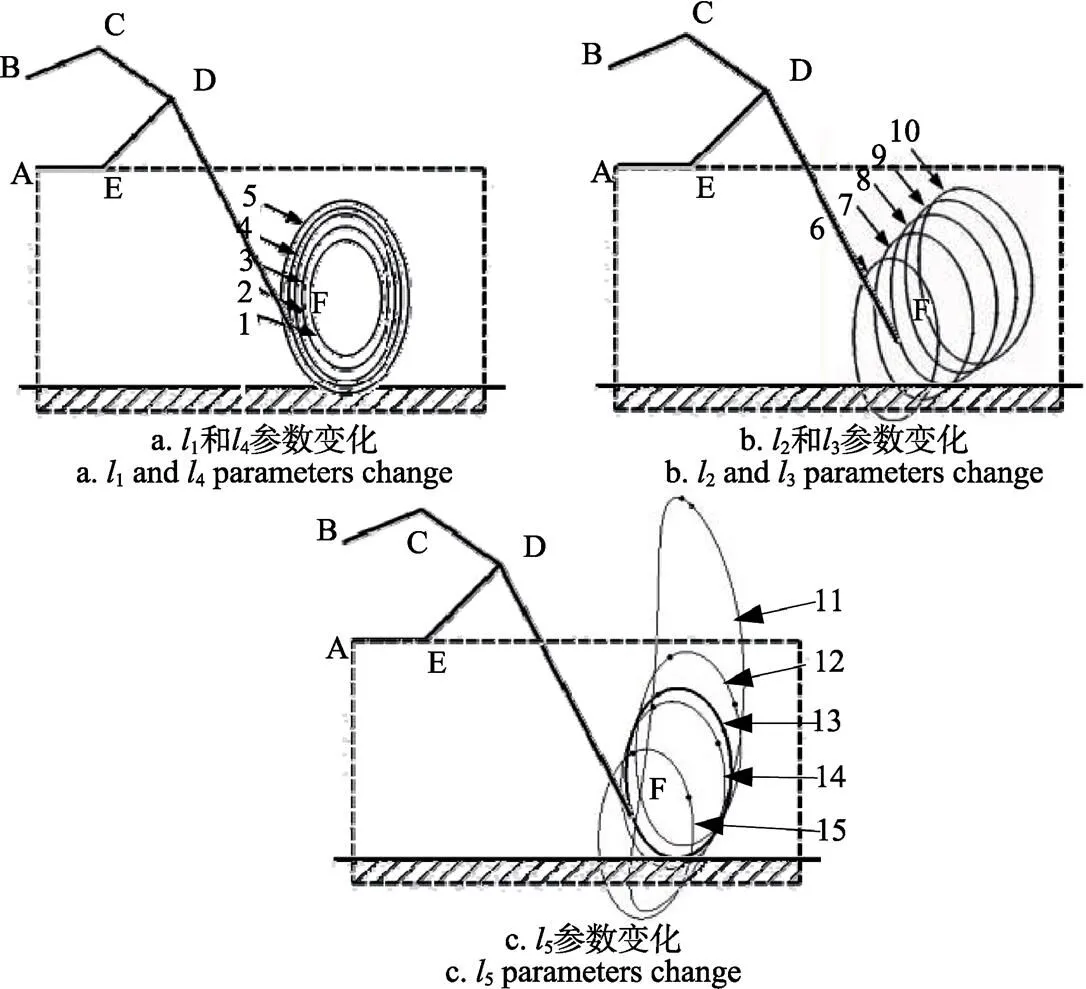
注:圖中標號1~15所指軌跡與表1中序號1~15的軌跡參數分別對應。
2.4.2 曲柄初始角度對相對軌跡的影響規律
由于角度參數1對軌跡形狀有較大影響,只給出1取不同值時各參數下軌跡的形狀及位置關系,如圖7所示。可看出,角度對軌跡的形狀有較大影響,但無特定規律。角度參數2與1對軌跡的影響類似。
條件約束及參數求解流程如圖8所示,圖中虛線框所示為數值循環比較法求解的過程。
根據參數求解流程圖,結合穴式播種的一般速度范圍并充分考慮較高作業速度的要求,在3~8 km/h范圍內[28],求得對應不同株距且滿足軌跡要求的機構調整參數及作業參數如表2所示。
根據對應不同株距的結構調整參數與作業參數組合,可形成251.2~344.7 mm豎直方向的有效作業軌跡。有效作業軌跡參數即有效高度以及繞扣最大橫弦值,如表3所示,滿足設計要求。
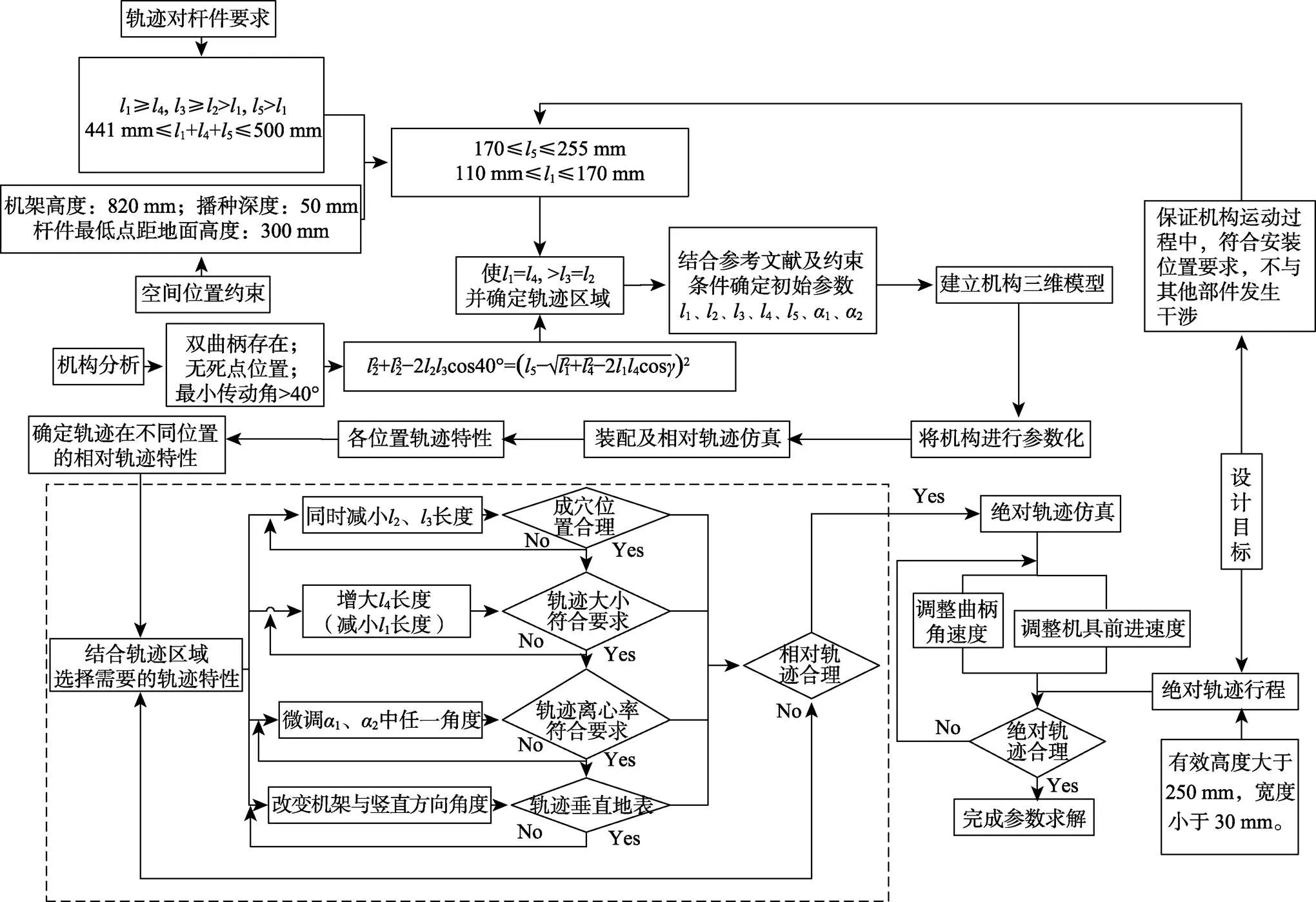
圖8 五桿機構條件約束關系及參數求解流程
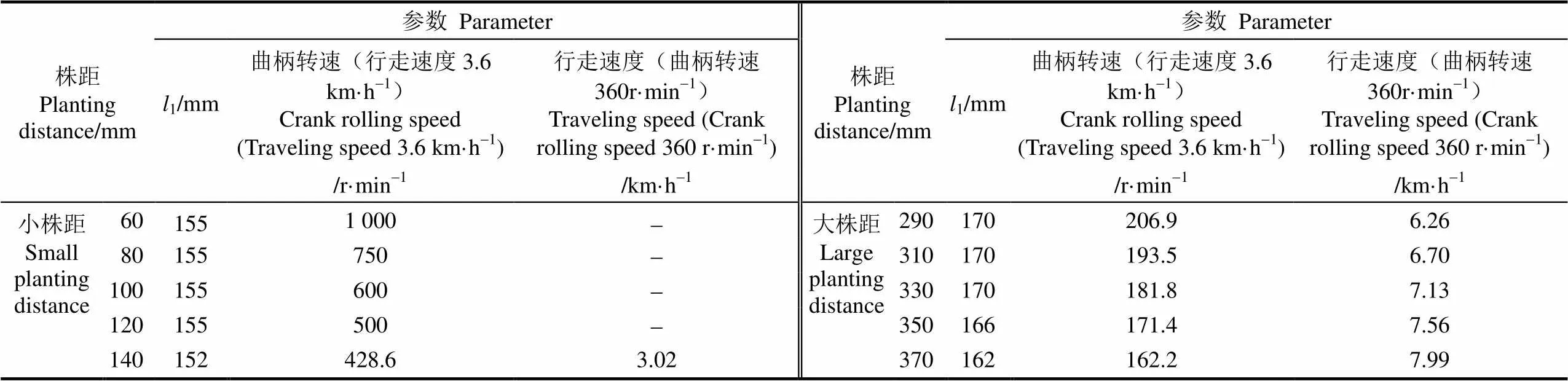
表2 對應不同株距的機構調整參數及作業參數表
注:小株距對應其他參數:2=150 mm,3=180 mm,4=130 mm,5=180 mm,1=-12°,2=0°,6=500 mm;大株距對應其他參數:2=150 mm,3=180 mm,4=153 mm,5=180 mm,1=-12°,2=0°,6=500 mm;“-”不滿足行走速度要求。
Note: Small planting distance corresponding to the other parameters:2=150 mm,3=180 mm,4=130 mm,5=180 mm,1=-12°,2=0°,6=500 mm; Large planting distance corresponding to the other parameters:2=150 mm,3=180 mm,4=153 mm,5=180 mm,1=-12°,2=0°,6=500 mm; “-”did not meet the requirements of travel speed.
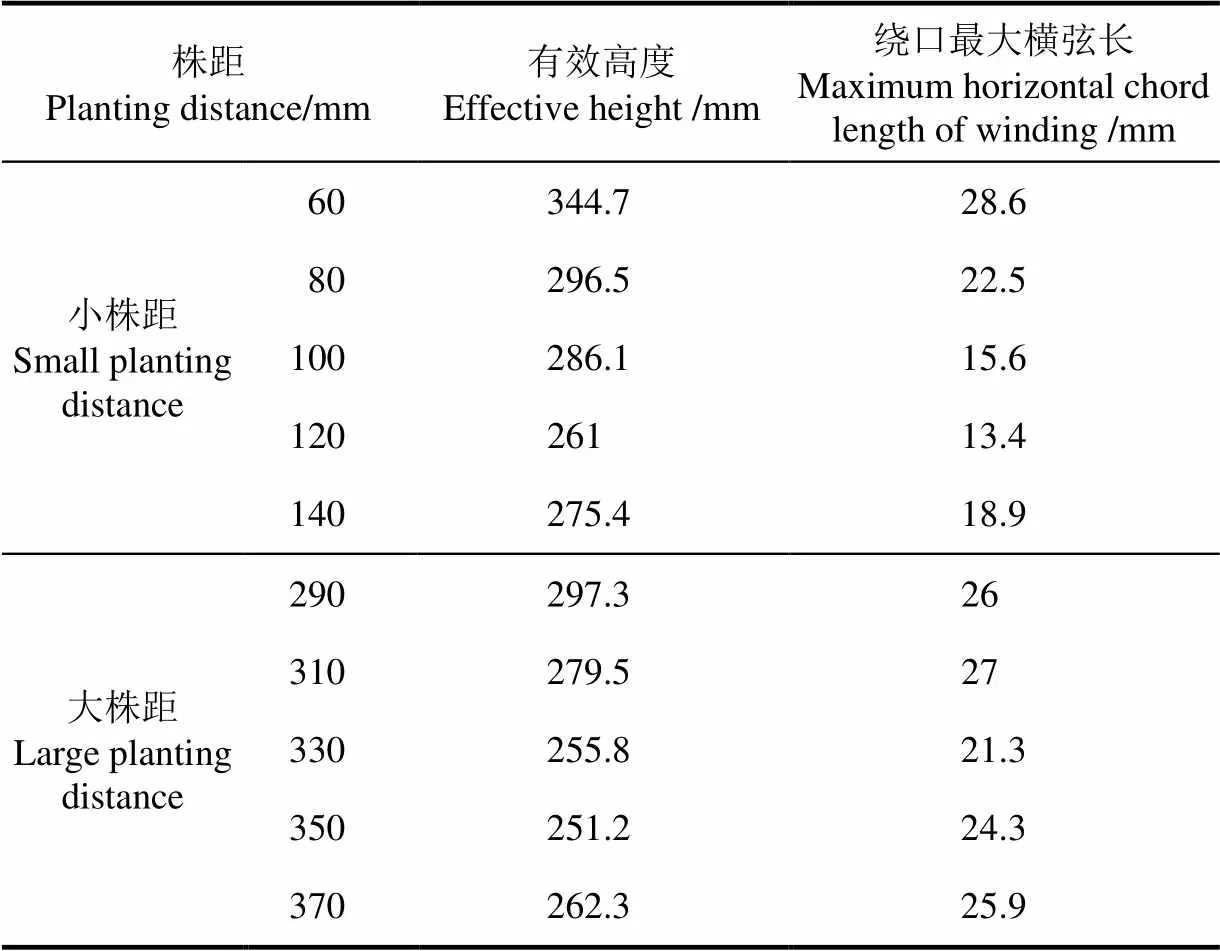
表3 對應不同株距機構有效作業軌跡參數
3 機構測試
3.1 試制裝置
三維模型及試驗樣機如圖9所示。其中虛線DF與連桿CD夾角3直接影響成穴器安裝位置,故此處定義DF與連桿CD夾角3為成穴器安裝角。
圖9c為成穴器7具體結構,其中錐體均分為3塊(其中一塊進行透明化處理方便說明),錐體外表面設有滑道,內側均有斜凹槽,可與成穴器套筒末端內表面固定滑塊相配合,且與空心排種桿通過拉桿鉸接,未投種時3塊錐體處于成穴器套筒最下端,錐體封閉,成穴器工作時,在扎入土壤最底部時空心排種桿上升,同時拉桿拉動3塊錐體分別沿著成穴器套筒末端內側固定滑塊相對成穴器套筒向上運動,錐體開啟,完成投種。成穴器保持投種口打開狀態直至完全從土壤及秸稈中拔出后關閉并進入下一循環,避免土塊及秸稈夾在錐體塊中。成穴器外套直徑為30 mm,底部成穴錐角為33°。
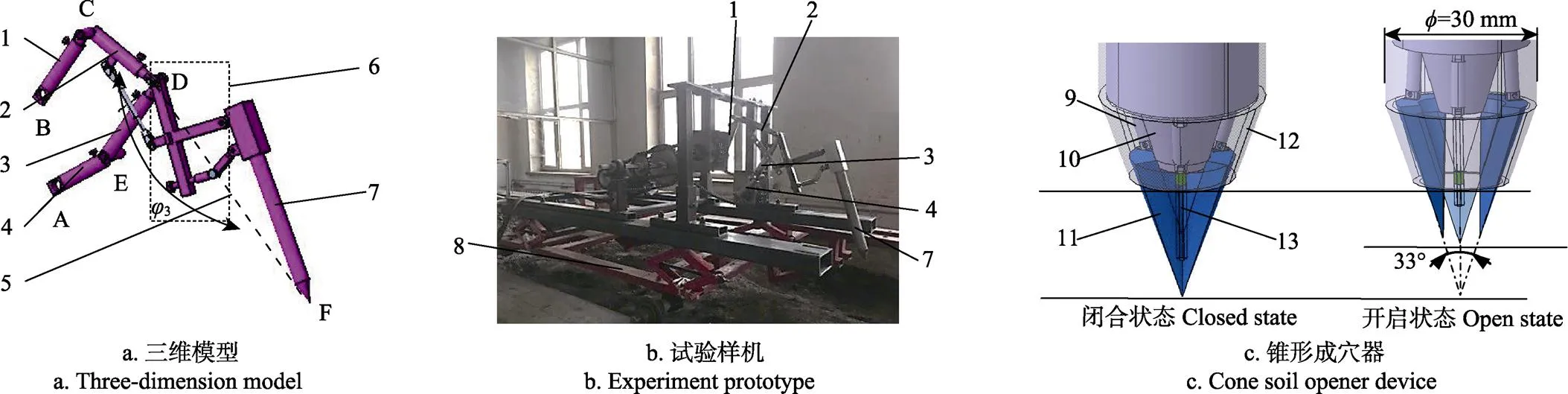
1. 曲柄BC 2. 連桿CD 3. 連桿DE 4. 曲柄AE 5. DF 6. 調整桿系7. 成穴器8. 行走臺架9. 拉桿10. 空心排種桿11. 錐體塊12. 成穴器套筒13. 滑道
3.2 儀器設備與方案
3.2.1 試驗儀器設備
使用的儀器設備及參數設置:自制土槽;美國約克科技有限公司Phantomv5.1高速攝影機(幀速為1 000幀/s,曝光時間為823s,分辨率為:1 024×1 024 pixel);電腦;變頻柜等。
3.2.2 測試方案
1)試驗條件
為模擬田間秸稈覆蓋,本試驗采用玉米散秸稈,受試驗條件限制秸稈覆蓋長度為3 m,模擬田間情況粉碎秸稈,短秸稈(長度小于5 cm)與長秸稈(長度大于5 cm)量比為1:3。為檢驗極限狀態時機構的作業能力,秸稈平均厚度為15 cm,最大厚度20 cm,覆蓋量為3.3 kg/m2,(注:一般保護性耕作覆蓋量最大為1.81 kg/m2。)為模擬秸稈殘茬在田間遺留狀態,秸稈采用部分平散鋪在土層表面,部分扎入土層。
2)試驗方法
將行走臺架放置于土槽上方,并將試驗樣機固定在行走臺架上,即樣機可隨行走臺架同步向前運動,完成穿透秸稈及成穴工序。
首先調整機構的高度以確保成穴器穿透秸稈后可以形成深度為5 cm的穴孔,繼而調整旋轉電機轉速,待機構運行平穩后開始行走作業。
高速攝像機拍攝五桿成穴機構相同株距不同成穴器安裝角3時成穴器穿透秸稈進行打穴乃至移出秸稈的整個過程,對不同株距分別試驗,并對各組試驗成像圖片進行觀察分析。以成穴器最初扎入秸稈相對豎直面角度和其直至最底端相對豎直面的角度變化衡量穿透能力,角度變化范圍越小穿透能力越好,以成穴器扎入秸稈直至最底端乃至移出秸稈整個過程中對秸稈的刮帶、擾動和挑起現象判斷擾動情況,越小越好。
3.3 影像分析
選取120 mm株距,成穴器安裝角3為110°、134°、158°時試驗截圖,如圖10所示,觀察成穴器對秸稈的穿透能力和擾動情況。
當成穴器安裝角3為110°時,如圖10a,成穴器向內斜插入秸稈中,在此過程中,秸稈的擾動較小,成穴過程穿透秸稈能力較強,但成穴器在最低點時,由于從入土到出土角度的改變,使得成穴器在最低點對秸稈有擾動過程,且從最低點至離開秸稈過程中,將秸稈向前推動,且在離開秸稈表面時,將秸稈向外挑起,對秸稈的擾動較大;當安裝角3為134o時,如圖10b,成穴器稍向外斜插入秸稈中,在此過程中,對秸稈的穿透能力強,成穴器在最低點時,對秸稈擾動程度比110°時小,且從最低點至離開秸稈過程中,對秸稈的擾動較小,離開秸稈表面時,對秸稈的挑動程度小;當安裝角3為158°時,如圖10c,成穴器在五桿機構的帶動下壓入秸稈中,對秸稈穿透能力較差,離開秸稈時,由于是壓入的方式進入秸稈中,故上行時無明顯挑起秸稈現象。
在試驗中,由于秸稈的作用及土壤的回落等情況,無法精確得到穴孔的狀態,因此,根據圖9a創建的三維模型,采用CATIA運動仿真模塊,各桿件之間的運動副參見表1,模擬五桿成穴機構針對三種成穴器安裝角分別在無秸稈覆蓋情況工作時,所形成的穴口,各穴口截面如圖11所示。
由圖11可以得出,隨著成穴器安裝角3增大,穴口長度依次增大,其中,安裝角3為158°時穴口斜度較小,無法保證種子落在最低點,不能保證播深的一致性。綜合考慮在株距120 mm條件下,機構對應不同成穴器安裝角時對秸稈的穿透情況、出土時對秸稈的擾動程度以及所成穴口的長度,角度為134°時的機構符合最佳成穴的要求。
通過以上方法獲得在不同株距下滿足五桿成穴機構最佳成穴要求的成穴器安裝角,如表4所示。
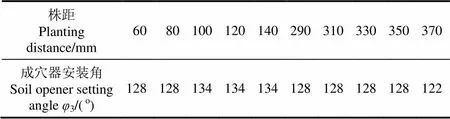
表4 不同株距下五桿成穴機構最佳成穴器安裝角
4 結 論
1)實現不對秸稈殘茬進行任何處理的注射式免耕精密播種的基礎條件是具有大豎直行程及幅寬可調的“門字形”軌跡成形機構。
2)軌跡區域定位結合數值循環比較可有效提高五桿機構參數化求解效率。針對不同作物進行工程應用時,機構設計參數及調整參數以上曲柄長度為主,下曲柄長度和成穴器安裝角為輔進行。對應不同株距的結構調整參數與作業參數組合,可形成251.2~344.7 mm范圍內豎直方向的有效作業軌跡。
3)對于不同株距的作業要求,可通過調整成穴器安裝角度進行適應,其對應關系為:株距60、80、100、120、140、290、310、330、350、370 mm,安裝角分別為128°、128°、134°、134°、134°、128°、128°、128°、128°、122°。
[1] 高煥文,何明,尚書旗,等. 保護性耕作高產高效體系[J].農業機械學報,2013,44(6):35-38. Gao Huanwen, He Ming, Shang Shuqi, et al. High yield and benefit system for conservation tillage[J]. Transactions of the Chinese Society for Agricultural Machinery, 2013, 44(6): 35-38. (in Chinese with English abstract)
[2] Sullivan D G, Truman C C, Schomberg H H, et al. Potential impact of conservation tillage on conserving water resources in Georgia[J]. Journal of Soil and Water Conservation. 2007, 62(3): 145-152.
[3] Ralph P. Analyzing future farming practices today[C]. Proceedings of 2004 Western States Conservation Tillage Conference, University of California, USA, 2004.
[4] Soza E, Botta G, Tourn M, et al. Direct corn seeding. Effects of residue clearance on implant efficiency[J]. Spanish Journal of Agricultural Research, 2003, 1(3): 99-103.
[5] 王漢羊,陳海濤,紀文義. 2BMFJ-3型麥茬地免耕精播機防堵裝置[J]. 農業機械學報,2013,44(4):64-70. Wang Hanyang, Chen Haitao, Ji Wenyi. Anti-blocking mechanism of type 2BMFJ-3 no-till precision planter for wheat stubble fields[J]. Transactions of the Chinese Society for Agricultural Machinery, 2013, 44(4): 64-70. (in Chinese with English abstract)
[6] 王漢羊,陳海濤,紀文義. 2BMFJ-3(B)型茬地大豆免耕覆秸精播機性能試驗研究[J]. 大豆科技,2012(2):43-46. Wang Hanyang, Chen Haitao, Ji Wenyi. Performance test on 2BMFJ-3(B) no-tillage soybean precision seeder in stubble field[J]. Soybean Science and Technology, 2012(2): 43-46. (in Chinese with English abstract)
[7] 張晉國,高煥文. 免耕播種機新型防堵裝置的研究[J]. 農業機械學報,2000,31(4):33-35. Zhang Jinguo, Gao Huanwen. Study on the strip chopping anti-blocking mechanism[J]. Transactions of the Chinese Society for Agricultural Machinery, 2000, 31(4): 33-35.(in Chinese with English abstract)
[8] 王金武,劉亞華,王金峰,等. 全橢圓齒輪行星系液態肥深施機構優化設計與試驗[J]. 農業機械學報,2002,43(10):60-65. Wang Jinwu, Liu Yahua, Wang Jinfeng, et al. Optimization design and experiment of liquid-fertilizer applying deep- fertilization mechanism for planetary elliptic gears[J]. Transactions of the Chinese Society for Agricultural Machinery, 2002, 43(10): 60-65. (in Chinese with English abstract)
[9] 張繼釗. 基于秧針靜軌跡的旋轉式分插機構逆向求解[D]. 杭州:浙江理工大學,2013. Zhang Jizhao. Reverse Calculation of Rotary Transplanting Mechanism Based on the Seeding Needle Tip Point’s Displacement[D]. Hangzhou: Zhejiang Science and Technology University, 2003. (in Chinese with English abstract)
[10] 陳建能,王英,張翔,等. 基于共軛凸輪的強制推秧機構反求設計[J]. 農業工程學報,2011,27(3):98-102. Chen Jianneng, Wang Ying, Zhang Xiang, et al. Reverse design of compulsory seedling-pushing mechanism based on conjugate cam[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2011, 27(3): 98-102. (in Chinese with English abstract)
[11] 王金武,潘振偉,周文琪,等. SYJ-2型液肥變量施肥機設計與試驗[J]. 農業機械學報,2015,46(7):53-58. Wang Jinwu, Pan Zhenwei, Zhou Wenqi, et al. Design and test of SYJ-2 type liquid variable fertilizer[J]. Transactions of the Chinese Society for Agricultural Machinery, 2015, 46(7): 53-58. (in Chinese with English abstract)
[12] 郗曉煥,王金武,郎春玲,等. 液態施肥機橢圓齒輪扎穴機構優化設計與仿真[J]. 農業機械學報,2011,42(2): 80-83. Xi Xiaohuan, Wang Jinwu, Lang Chunling, et al. Optimal design and simulation on pricking hole mechanism of liquid fertilizer applicator[J]. Transactions of the Chinese Society for Agricultural Machinery, 2011, 42(2): 80-83. (in Chinese with English abstract)
[13] 馬旭,馬成林,張守勤. 地膜覆蓋播種機成穴器的研究[J]. 農業機械學報,1989,20(4):20-27. Ma Xu, Ma Chenglin, Zhang Shouqin. The study on accumulative drop unit of film mulch planter[J]. Transactions of the Chinese Society for Agricultural Machinery, 1989, 20(4): 20-27. (in Chinese with English abstract)
[14] 馬成林,李成華,于海業. 打穴播種機結構參數和工作參數的優化設計[J]. 農業機械學報,1999,30(3):30-34. Ma Chenglin, Li Chenghua, Yu Haiye. Optimal design of parameters for spade punch planter of maize[J]. Transactions of the Chinese Society for Agricultural Machinery, 1999, 30(3): 30-34. (in Chinese with English abstract)
[15] 馬成林,李成華,于海業,等. 鏟式成穴器成穴性能的試驗研究[J]. 農業機械學報,1999,30(2):33-37. Ma Chenglin, Li Chenghua, Yu Haiye, et al. An experimental study on the influence of parameters of spade soil opener on working quality[J]. Transactions of the Chinese Society for Agricultural Machinery, 1999, 30(2): 33-37. (in Chinese with English abstract)
[16] 鄭超,杜瑞成,蔡善儒,等. 直插式免耕穴播機的設計[J].農機化研究,2011,33(6):77-79. Zheng Chao, Du Ruicheng, Cai Shanru, et al. Design on No-tillage hill seeder with vertical dropping[J].Journal of Agricultural Mechanization Research. 2011, 33(6): 77-79. (in Chinese with English abstract)
[17] 陳曉光,左春檉,高峰. 直插式播種機的研究[J]. 農業工程學報,1993,9(3):66-70. Chen Xiaoguang, Zuo Chuncheng, Gao Feng. Study on the direct insert planter[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 1993, 9(3): 66-70. (in Chinese with English abstract)
[18] 孫桓,陳作模,葛文杰. 機械原理:第7版[M]. 北京:高等教育出版社,2011:109-143.
[19] 馬良,石寧. 齒輪-五桿組合機構運動學特征仿真分析[J]. 西安科技大學學報,2013,33(6):727-730. Ma Liang, Shi Ning. Gear-5-bar combination mechanism’s kinematics characteristic simulation[J]. Journal of Xi’an University of Science and Technology, 2013, 33(6): 727-730. (in Chinese with English abstract)
[20] 方芳. 齒輪五桿機構軌跡曲線生成系統的研制[J]. 機械制造與研究. 2006,35(1):59-61. Fang Fang. System of path generator for gear five-bar mechanism[J]. Machinery manufacturing and research. 2006, 35(1): 59-61. (in Chinese with English abstract)
[21] 陶軍,張蕊,劉遲. 齒輪五桿機構實現預定軌跡設計方法研究[J]. 科技創新導報. 2014,11(19):29-31. Tao Jun, Zhang Rui, Liu Chi. Study on the method of realizing preconceived track by geared five-bar mechanism [J]. Science and Technology Innovation Herald, 2014, 11(19): 29-31. (in Chinese with English abstract)
[22] 李學剛,黃永強,馮麗艷. 平面五桿機構雙曲柄存在的充要條件研究[J]. 機械科學與技術,2005,24(1):51-53. Li Xuegang, Huang Yongqiang, Feng Liyan. Study of the sufficient and necessary conditions for existence of double crank of planar five-bar mechanism[J]. Mechanical Science and Technology, 2005, 24(1): 51-53. (in Chinese with English abstract)
[23] 李團結,曹惟慶,褚金奎. 齒輪-五桿機構軌跡綜合的連續法[J]. 西安理工大學學報,1999,15(14):76-79. Li Tuanjie, Cao Weiqing, Chu Jinkui. Synthesis of path generation of the geared five-bar mechanism by continuation method[J]. Journal of Xi’ an University of Technology, 1999, 15(14): 76-79. (in Chinese with English abstract)
[24] Primrose E J F, Freudenstein F. Geared five-bar motion, part 2-arbitrary commensurate gear ratio minus[J]. Journal of Applied Mechanics, Trans of the ASME, 1963, 30(2): 170-175.
[25] Yu H, Yuan Z, Glimartin M J, et al. Modelling and control of a slider hybrid seven-bar system[C]. International Association of Science and Technology for Development (IASTED) International Conference on Robotice and Applications, Santa Barbara CA, USA, 319-323, October 28-30, 1999.
[26] H Yu. Modelling and control of hybrid machine systems: A five-bar mechanism case[J]. International Journal of Automation and Computing, 2006(3): 235-243.
[27] Smaili A A, Diab N A, Atallah N A. Optimum synthesis of mechanisms using tabu-gradient search algorithm[J]. ASME Journal of Mechanical Design, 2005, 127(5): 917-923.
[28] 中國農業機械化科學研究院. 農業機械設計手冊:上冊[M]. 北京:中國農業科學技術出版社,2007:321.
[29] 王漢羊. 2BMFJ-3麥茬地免耕覆秸大豆精密播種機的研究[D]. 哈爾濱:東北農業大學,2013. Wang Hanyang. Study on 2BMFJ-3 Type No-till Soybean Precision Planter With Straw-covering in Wheat Stubble Fields[D]. Harbin: Northeast Agricultural University, 2013. (in Chinese with English abstract)
[30] Lu Zhen, Wang Tianyou, Li Xincai, et al. Parametric design of the tangential intake port in diesel engines[J]. Proceedings of the Institution of Mechanical Engineers, 2013, 227(3): 342.
[31] 劉宏新,徐高偉,孟永超. CATIA三維設計基礎與應用[M]. 北京:機械工業出版社,2014.
[32] 劉宏新,宋微微. CATIA數字樣機運動仿真詳解:第2版[M]. 北京:機械工業出版社,2013.
[33] 梁崇高,阮平生. 連桿機構的計算機輔助設計[M]. 北京:機械工業出版社,1986.
[34] 褚金奎,孫建偉. 連桿機構尺度綜合的諧波特征參數法[M]. 北京:科學出版社,2010.
[35] 李學榮,應瑞森,傳俊發.連桿曲線圖譜[M]. 重慶:重慶出版社,1993:39.
Analysis and parameter solution of injection type no-till seeding into hole trajectory based on five-bar mechanism
Liu Hongxin, Wang Pan, Gai Guangwei, Xiang Binbin
(150030)
No-tillage seeder mainly uses the 2 ways of cutting and removing the straw to ensure seeding smoothly by now, and thus there are many problems: Higher power, environment pollution, twining and blocking of straw, and so on. To this end, a mechanism based on the special trajectory requirements was developed to enable the soil opener to penetrate into the surface without any treatment of the surface covering, which could lay substantial foundation for the implementation of injection-free no-tillage planting pattern. First of all, the analysis of mechanism aimed at the special trajectory was carried out and the five-bar mechanism was confirmed as the formation mechanism of trajectory. Moreover, the mathematical model of five-bar mechanism was set up, and the basic existence conditions and spatial constraints of double-crank and uniform five-bar mechanism were analyzed on the basis of the model. Given the feasible region of relative trajectory of the cavitation endpoint, and combined with the mechanical design module and knowledge engineering module of CATIA (computer aided three-dimensional interactive application) software, the parametric model was set up, the movement was simulated and the trajectory for five-bar mechanism was drawn. Subsequently, the distribution characteristics of region trajectory of cavitation endpoint were researched by the method of region localization of trajectory; the influence of the parameters on the trajectory was researched by the method of numerical cycle and comparison, and combined with the constrain conditions, the combination of structural parameters and operation parameters was obtained corresponding to different distance; on the above condition, the effective operation trajectory at the vertical direction changed from 251.2 to 344.7 mm. In May, 2016, the experiments were carried out with the prototype in the Soil Laboratory of the College of Engineering, Northeast Agricultural University. The conditions were set as follows: The length of mulching straw was 3 m and the average thickness of straw was 15 cm. In order to simulate the actual working condition in the field, the straw was scattered on the soil surface, and part of straw was stuck in the soil layer. The whole process that the soil opener device perforated through the straw until the straw was removed completely was shot by high-speed camera with the same planting spacing under different setting angle of soil opener of five-bar mechanism; the experiments were also conducted on different plant spacing respectively, and then the experimental images were observed and analyzed. Combined with the motion simulation of CATIA, the soil opener setting angle of five-bar cavitation mechanism was obtained, which could meet the requirement for the best hole-forming points. The angles were 128°, 128°, 134°, 134°, 134°, 128°, 128°, 128°, 128°and 122°respectively corresponding to the spacing of 60, 80, 100, 120, 140, 290, 310, 330, 350, and 370 mm. Research showed that the formation mechanism of trajectory in the process of no-tillage seeding based on the five-bar mechanism could drive cavitation device to complete the operation under the condition of straw returning drastically, and perforate through the straw effectively and form cavitation as required, with fewer scraping phenomena. It is confirmed that the region localization of trajectory can improve the solution efficiency of parameters combination of the five-bar mechanism, and also provide the effective method of solving the parameters of five-bar mechanism according to the ratio of long axis to short axis of similar ellipse trajectory.
agriculture equipment; agricultural machinery; seeding; no-tillage seeding; injection type; five-bar mechanism; trajectory region localization; numerical cycle comparison
10.11975/j.issn.1002-6819.2017.08.003
S223.2+3
A
1002-6819(2017)-08-0021-09
2016-08-01
2017-03-02
國家自然科學基金項目(51275086);公益性行業科研專項(201303011)。
劉宏新,男,教授,博士生導師,研究方向為農業機械化技術與裝備、數字化設計與數字資源管理、車輛工程。哈爾濱 東北農業大學工程學院,150030。Email:Lcc98@neau.edu.cn
劉宏新,王 盼,改廣偉,相斌斌.基于五桿機構的注射式免耕播種成穴軌跡分析與參數求解[J]. 農業工程學報,2017,33(8):21-29. doi:10.11975/j.issn.1002-6819.2017.08.003 http://www.tcsae.org
Liu Hongxin, Wang Pan, Gai Guangwei, Xiang Binbin. Analysis and parameter solution of injection type no-till seeding into hole trajectory based on five-bar mechanism[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(8): 21-29. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2017.08.003 http://www.tcsae.org
