基于多學科技術融合的智能農機控制平臺研究綜述
2017-05-25 08:00:37袁朝輝
農業工程學報 2017年8期
關鍵詞:模型
董 勝,袁朝輝,谷 超,楊 芳
?
基于多學科技術融合的智能農機控制平臺研究綜述
董 勝1,袁朝輝1※,谷 超2,楊 芳3
(1. 西北工業大學自動化學院,西安710072;2.飛行器控制一體化技術重點實驗室,中航工業自控所西安 710065;3. 河南科技大學機電學院,洛陽471023)
農業機械的自動化和智能化包含內容廣泛,有農機定位與導航,動態路徑規劃,機器視覺和遠程監控等,牽涉到大量的工程技術學科,包括導航、圖像、模型與策略、執行器以及數據鏈等。農機定位與導航一般采用基于農機運動學模型結合GPS(global positioning system)/IMU(inertial measurement unit)組合導航信息,在導航路徑規劃算法指引下實現農機軌跡跟蹤的方法。建立的農機運動學模型精度,GPS數據的連續性以及慣導器件誤差系數漂移等因素都會影響該方法的有效性。路徑跟蹤通常采用各種現代控制理論與方法,而面對復雜的田間作業環境變化,農機的自主避障以及動態路徑規劃能力也會影響軌跡跟蹤精度。機器視覺的穩定性和目標特征信息分離度影響著農機環境感知能力,目前目標識別主要采用hough變換,hough變換的全局檢測特性決定了該算法運算量較大,需要探究改進特征提取算法。遠程監控農機作業是智能農機發展的一個方向,構建無線導航,控制和視頻數據傳輸網絡有助于提高農機的智能化水平,可以采用分布式哈希表(distributed hash table)來研究網絡覆蓋和互聯技術。該文融合多個學科,從高精度定位與導航技術、復雜環境及工況下農機運動精確自主控制技術、穩定清晰的機器視覺感知技術和基于4G網絡和新一代物聯網的高覆蓋數據傳輸技術幾個方面,論述了智能農機在光機電液多個學科領域內的研究現狀,并指出采用北斗地基增強網絡和網絡RTK(real-time kinematic)技術、慣導定位誤差精確建模與補償、環境感知與自主避障、立體結構自組網技術以及多機協作是現代農業機械的發展方向。以期為現代化智能農業機械的設計提供參考。
農業機械;導航;機器視覺;定位;數據鏈;多學科技術融合
0 引 言
智能農機裝備是提質增效、轉變發展方式、增強農業綜合生產能力的基礎,對支撐現代農業發展,保障糧食安全意義重大。2012年、2013年全國農業機械行業累計完成工業總產值分別為3,382.40億元、3,800.00億元,同比增長19.07%、12.35%[1],市場需求剛性增長。
以美國為代表的發達國家較早開展了基于RTK-GPS (real-time kinematic-global positioning system)[2]技術的智能農機定位與導航研究,迄今已累積了大量研究成果并成功用于商業化,國外主要代表廠家有Trimble、John Deere、GreenStar TM等。九十年代斯坦福大學的O’Connor等[3]將高精度RTK-GPS應用于農機導航中,其利用四天線GPS系統為拖拉機提供位姿信息,在田間行駛速度3.25 km/h時,航向誤差不大于0.1°,直線跟蹤標準差不大于2.5 cm。Noguchi等[4]提出了一種由RTK-GPS、光纖陀螺儀和慣性測量裝置組成的導航傳感器,可實現對農機行進中傾斜角和上升角度等位姿的測量,進而完成實時偏差的確定和校正,實車運行顯示改進的農機以2.5 m/s速度運行時的位置偏差小于3 cm。Eaton等[5]將Back stepping控制方法應用到農機路徑跟蹤控制中,并且在控制方法的設計過程中考慮了轉向系動力學特性的影響,取得了較好的試驗效果。Payne等[6]在大量辨識試驗的基礎上提出了一種航向率動力學模型,并基于該模型設計了LQR路徑跟蹤控制方法,解決了農機在高速行駛時的導航控制問題。Derrick等[7]提出了一種模型參考自適應控制系統,采用前饋橫擺角速度控制器補償偏航率,進而提高了直線路徑的橫向位置跟蹤精度。Bergerman 等[8]使用激光掃描儀探測周圍樹木及雜物進行路徑規劃開發了一款果園自主移動機器人。Stombaugh[9]研究小組以Case Ih7220型號的兩輪驅動拖拉機為平臺;以安裝位置高于駕駛艙的方式消除GPS信號滯后,行進中導航最大偏差±16 cm。這些研究團隊都或多或少的使用了跨學科的技術融合手段[10-13],取得了較好的研究成果。
在國內,羅錫文等[14-16]在東方紅X-804拖拉機上開發了基于RTK-DGPS的導航控制系統。將拖拉機運動學模型和操縱控制模型相結合,設計了應用地面偽距差分定位算法的導航控制器,取得了很好的定位導航效果,達到前進速度為0.8 m/s時,最大跟蹤誤差小于0.15 m,平均跟蹤誤差不超過0.03 m。李逃昌等[17-19]針對運動學模型中的近似條件對模型控制方法曲線路徑跟蹤精度的影響,提出了一種農機導航自校正模型控制方法。該方法采用模型控制方法設計控制律,并采用模糊控制方法自適應地在線調節模型控制律的控制量。前進速度為 1.0 m/s時,直線跟蹤最大橫向偏差小于0.0649 m,曲線跟蹤橫向最大偏差小于0.1857 m。根據近年來公開出來的相關研究內容和研究成果,國內學者在定位和導航技術方面取得了一定進步[20-22],但是從事農機智能化研究工作的機構主要集中在高校以及一些大公司,相關設備也只是處在試驗階段。農機作業信息感知、決策智控、試驗檢測等基礎和關鍵共性技術實力薄弱。農機裝備在制造過程、整機裝配以及電器系統可靠性檢測方法和手段缺乏,系統復雜度較高,裝備田間試驗數據不足等問題制約著智能農機的發展應用,因此實現農業智能化,完成農業革命還有很長的路需要走。
1 智能農機的多學科技術融合
智能農機的研究應該滲透到多個學科,美國伊利諾伊州立大學Dickson MA等以John Deere GATOR型農用車為平臺;建立了2自由度的線性動力學模型,RTK-DGPS、光纖陀螺FOG(fiber optic gyroscop)和IMU(inertial measurement unit)結合應用于農機作業路線跟蹤導航;提出預瞄策略的動態路徑搜索算法;通過WLAN與基站GIS數據相比校正,農機前進速度為3.5 m/s時,最大跟蹤誤差±10 cm[23]。這套智能農機實現方案融合了多項技術,對中國智能農機的發展具有啟發意義。
2016年中國中央一號文件指出,加快中國農業現代化,重點要在農業裝備、智能農業等領域突破關鍵技術。一些學者也分析提出了中國發展農業機械的重點領 域[24]。為了更好的適應國家三農工作計劃,關于智能農業裝備可以開展以拖拉機及聯合多農機具為對象進行基于北斗的農機定位與導航、機器視覺、機器學習、智能組網以及多機協作[25]的研究,多學科既相互獨立又緊密相連。本文將從復雜環境下基于北斗的定位導航技術,機器視覺感知技術,移動通信結合物聯網的自組網數據傳輸技術和自主作業智能控制技術幾個方面論述智能農機在導航、控制、互聯網等領域內的研究現狀與發展。提出一套跨學科組建智能農機系統的實施策略,系統結構框圖如圖1所示。
整個系統分為電子控制單元ECU(electronic control unit),農機操縱控制,定位與導航,自組網等部分。ECU負責頂層決策,人機交互以及數據傳輸功能。農機操縱控制系統負責實際農機的運動控制,以及緊急突發情況下的自主決策功能。各個部分相互獨立,通過互相傳輸的數據流各個部分又緊密聯系起來,共同完成農機田間作業的復雜控制任務。下文將針對多學科技術在智能農機系統應用上的研究現狀和存在的一些問題,提出相應的改善方法。進而整合成一套基于北斗導航的智能農機設計方案,并在方案設計過程中給出了一些可以開展進一步研究的內容,這些研究內容也代表了智能農機未來一段時間內某一領域內的發展方向。
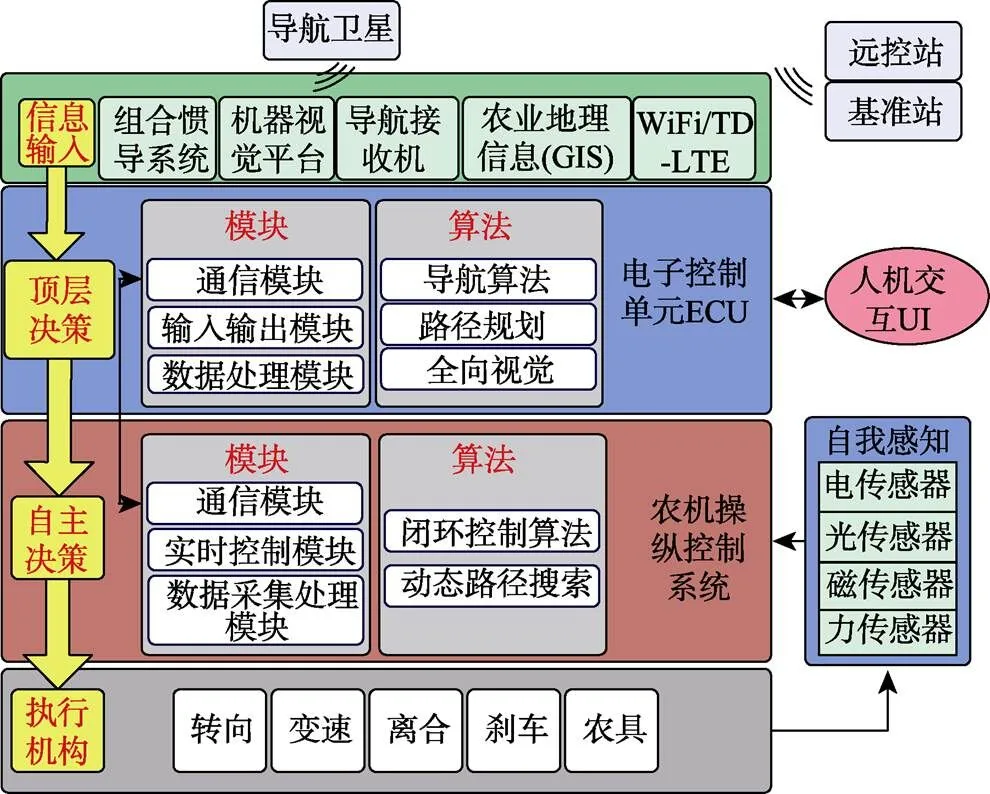
圖1 智能農機系統組成
2 農機定位與導航
目前中國農機定位與導航廣泛采用傳統RTK-GPS技術,該技術方法的觀測誤差會隨著流動站與基準站距離的增大而增長,觀測結果的準確度不能保證。在丘陵以及西部偏遠地區導航信號還會受遮擋、信號增強站點分布稀疏等因素影響。有必要開展以北斗導航為核心輔助慣性導航元件的導航系統創新,且可以從“提高北斗定位精度”和“導航誤差精確建模與補償”等方面開展研究[26]。圖2展示了一種農機導航方案。
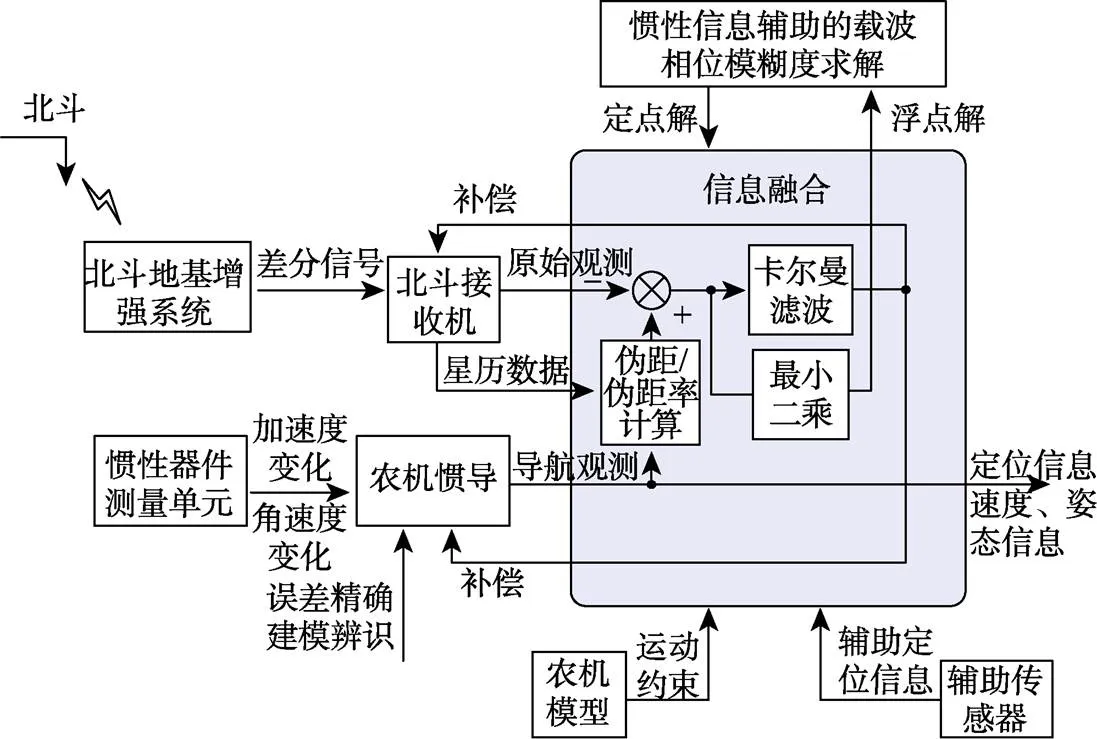
圖2 農機組合定位導航
該農機定位與導航采用北斗結合IMU的緊組合導航模式。北斗信號經過地基增強網絡后可以滿足偏遠地區使用的要求,機載慣導元件誤差精確建模補償控制處理后給出的慣導信息融合北斗星歷數據,進而與北斗信號比較通過設計最優綜合與濾波算法,反饋補償修正北斗數據和慣導數據。
2.1 基于北斗地基增強網絡的高精度定位方法
北斗導航系統和地面慣性測量單元是完成農機定位與導航的關鍵。北斗信號較弱時,無法直接使用衛星定位導航數據,可以考慮利用網絡RTK技術和基于國家北斗地基增強網絡的高精度差分定位技術,融合北斗地基增強網絡與移動增強基準站提供差分數據服務,以此來保證導航定位精度,可以從以下幾個方面開展研究:
1)研究北斗地基增強技術,建立精確的最優化觀測模型,研究北斗衛星誤差來源及消除方法,使用虛擬參考站VRS(virtual reference station)技術克服傳統RTK的缺陷,修正導航定位的實時相關誤差。
2)研究觀測數據處理的關鍵技術,載波相位觀測通常會由于各種原因產生周跳,周跳探測與恢復是保證定位精度的前提,整周模糊度解算是高精度定位的關鍵步驟。處理好觀測數據將提升北斗地基增強網絡對農機導航高精度定位的支撐作用;
3)研究多導航系統
北斗/GPS/GLONASS/Galileo多模多頻觀測信息最優融合模型和模型參數精確估計方法以及基于多系統冗余信息的驗后殘差載波粗差探測方法,實現高精度載波信息質量控制,提高農機北斗導航系統定位精度。
2.2 農機慣導誤差精確建模與補償方法
IMU器件在實際使用過程中其定位導航誤差不斷積累,隨工作時間的增長而變大,通常定期利用外部信息(GPS/北斗數據)進行誤差校正。這就導致有部分時間內定位導航誤差較大。通常采用Kalman濾波算法精確估計陀螺漂移和加速度計零偏,研究農機設備三維運動約束,對慣導誤差精確建模,實現對慣導定位誤差的實時補償和控制。導航坐標系選取東北天地理坐標系,忽略加速度計的刻度系數誤差和安裝誤差角,慣導姿態誤差方程為[27]
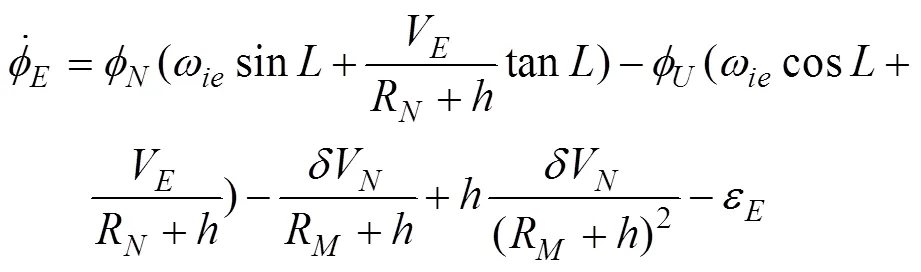
(2)
(3)
速度誤差方程為
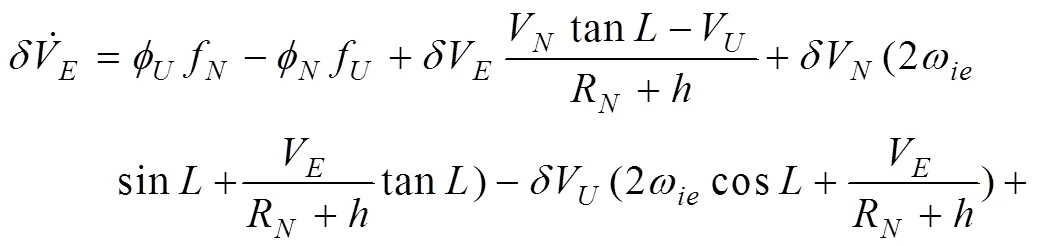
(5)
(6)
定位誤差方程為
(8)
(9)
在上述模型的基礎上可以進一步考慮刻度系數誤差和安裝誤差角,建立誤差的精確模型[27]。將誤差方程寫成狀態空間描述,拉普拉斯變換后求得特征根可以分析導航誤差特性[28]。通過遞推卡爾曼濾波器將北斗導航信息和慣導系統的信息進行融合,用北斗的導航信息作為慣導系統的校正信息,狀態變量選擇導航系統誤差和各慣性器件誤差。通過對誤差精確建模和組合導航的信息融合技術達到在偏遠地區復雜環境下的高精度定位和導航目的。
3 農機機器視覺感知
針對復雜環境下對農機導航精度、實時性及自主精準作業的需求,構建穩定清晰的全向視覺與雙目視覺結合的多源視覺感知平臺,可以提高農機系統對復雜作業環境與目標對象的綜合感知與分析能力,實現農機靜態及行進過程中對地理標志物、障礙物、農作物等目標的準確辨識,為農機在衛星信號不穩定、慣導誤差累積作業環境下提供高精度位置信息,彌補慣性導航系統的缺陷。目前主要的目標識別方法有Hough變換,模型匹配,虛交點分析等,然后還可以根據攝像機與目標的幾何關系得到機械的位置姿態,用于輔助導航。
3.1 圖像場景特征分析與目標識別技術
給智能農機裝上全向視覺裝置,對視覺系統獲取的環境信息進行場景分析。針對衛星信號不穩定、慣導誤差累積、農機無法獲得連續有效的高精度定位信息的問題,通過圖像分析技術對特定標識進行識別,提取該標識下預設的位置信息,修正慣導誤差,可以與第2節介紹的北斗/慣導組合定位系統進行互補。
在國內,機器視覺還主要集中在人臉、字體以及車牌識別等方面的應用上,而其在具有復雜環境的農業領域應用還不廣泛。農機的自能化離不開機器視覺。其對智能農機的動作起提前預測作用[29]。張磊等[30-31]通過在農機上安裝機器視覺在低速(<10 km/h)行駛中,其檢測障礙物的正確率達到96%,且不依靠慣導很好地完成了路徑跟蹤。其他學者[32-34]依靠機器視覺技術也很好地實現復雜環境下的路徑跟蹤和農作物的特征提取。
3.1.1 特征信息提取
圖像理解任務的目標識別與分析算法應用比較廣泛的特征主要有低層視覺特征,中間語義特征和上下文特征[35]。低層視覺特征獲取方便,易于表達,應用廣泛。但是特征數量較多,尤其是在復雜作業環境下使用低層視覺會大大提高算法復雜度。中間語義特征主要包括語義屬性特征,區域語義概念特征和詞袋(Bag-of-Word)[36-37]特征。低層視覺特征和中間語義在目標識別中效率不高。而使用上下文信息進行特征識別可以快速的捕獲特定場景中的重點信息。上下文信息中應用到了經驗知識,可與統計模型如馬爾科夫隨機模型等結合起來。常用的上下文信息包括與目標物體臨近的其他物體,物體自身的局部子區域。在復雜的農田作業環境中可利用的上下文信息非常多,比如田壟的走勢信息,農作物的分布生長狀態等[38-39]。通過對比一段圖像序列中的每幀圖片識別出田間的各種突發情況,采用合理的分類算法訓練出智能分類器。
3.1.2 特征信息表達
在特征獲取的基礎上,所選取的特征信息表達方式是決定數據樣本之間的相似性和分類器設計關鍵。圖像特征信息優化表達的策略主要有基于特征提取的特征選擇和高維數據聚類方法[40]等理論。
基于特征提取的特征選擇算法主要以主成分分析PCA(principal component analysis)[41]和線性判別分析LDA(linear discriminant analysis)[42]為主。PCA實際上是一種基于數據集方差的特征選擇算法的擴展。通過樣本重構使得樣本在低維空間中盡量分散且保留樣本原始空間的差異性。LDA基本思想是將高維空間的樣本投射到最佳鑒別矢量空間,投射后保證樣本在新的空間中有最大的類間距離和最小的類內距離,一般采用Fisher準則函數。

當圖像數據轉化為向量后,數據的維度一般都很大,高維數據的聚類方法研究的就是數據間邏輯上或物理上的聯系,通過一定的規則將原始特征數據劃分為在性質上相似的特征數據點。進而把一個沒有類別標記的數據集按照某種準則劃分成若干個子集(類),并使相似的數據對象盡可能地歸為一類、不相似的數據對象盡可能地劃分到不同的類中[43]。通常采用子空間聚類或模糊聚類方法。子空間聚類可分為自下而上、自頂而下和混合策略3種類型[44]。典型的算法有CLIQUE(clustering in quest)[45],ENCLUS(entropy-based clustering)[46]和MAFIA(merging of adaptive finite intervals algorithm)[47]等。該類算法通過使用Apriori策略來查找和合并某度量大于給定閾值的網格,產生候選子空間。并將這些候選子空間按其覆蓋即子空間中點數量的大小排序,最后用最小描述長度準則將規模較低的子空間刪除。這類算法理論上可以處理任意數量維中的任意形狀和類型的簇。模糊聚類方法主要是把含有個樣本的數據集分為類,聚類結果用聚類中心和隸屬度表示[48]。主要目的是通過選取合適的迭代準則,在極值的約束條件下使得目標函數最小,即存在:

(12)
3.2 高穩定全向和雙目視覺的農機精確導航方法
復雜或極端作業環境下,可以采用較明顯的自然界特征信息(犁溝,田壟以及農作物等)來提取導航基準線,輔助農機導航。但是實際應用中農機不同角度光照強度的影響較大,以及田間雜草等因素影響也會導致導航基準線丟失。這種情況下可以利用置于農機頂部的具有大范圍轉動能力的高穩定高清晰全向視覺獲取地標場景圖像,重新找到較遠范圍內的基準線。并且還可以利用多個人工放置的地標或特征較為明顯的天然地標,通過上節論述的特征提取技術對特定標識進行識別,提取該預設標識的位置信息,設計多地標/農機間距解算算法,利用多地標與農機的距離信息和幾何關系,結合三維空間中的Chan算法輔助農機自定位。
高穩定高清晰全向視覺獲取農機周圍視景圖像,并采用圖像拼接技術得到全景圖像,以其作為目標定位與識別的參考[49-50];通過采集的視覺圖像,Cheein使用SVM使農機正確識別出橄欖園中的樹枝障礙物[51]。置于農機前端的雙目視覺采集農機前方視景圖像,圖像數據信息融合后,結合全向視覺多場景圖像信息,可以實現復雜多變環境,如光照強度不均勻,目標形變,遮擋,背景雜亂,背景與目標具有相似特征,目標多變性等作業環境條件下,目標作物、苗田壟線和障礙物等的準確識別。通過對視景圖像信息分析,給出農機導航線,識別障礙物位置與類型,協助指導農機自主行進,穩定有效避障,減少漏檢漏耕,保證農機的精確自主作業。
4 農機物聯網與數據鏈
在現代農業生產、經營和管理環節中,充分利用物聯網,電信網以及無線傳感器自組網絡的智能農機數據傳輸技術,能夠給智能農業的發展提供強大的動力。將多鏈路數據傳輸技術應用到農業各環節中已是目前的發展趨勢。要求突破在空天地各個層面(移動通信網、北斗導航、無人機和作業面自組織網)的立體拓撲自組網技術,滿足農機作業區域網絡覆蓋,保證自組網的魯棒性和傳輸可靠性,為農機作業提供網絡數據傳輸保障。
針對農機各環境條件下的自主作業與遠程監控、北斗精確定位對數據傳輸帶寬的需求,依靠移動通信網絡(TD-LTE、LTE、NB-IoT)[52-54],地面工作站,空中無人機基站和地面無線網格網絡(MESH)構建立體拓撲自組網,網絡結構如圖3所示。并在自組網絡中實現多跳分組無線路由協議[55]能夠實現多鏈路數據網絡傳輸。
地面工作站負責作業區域和移動通信網的連接,地面工作站和空中無人機上的多鏈路接入設備一同構成作業區域主網。如公網斷開,地面工作站還負責區域北斗差分信號的處理和播發。
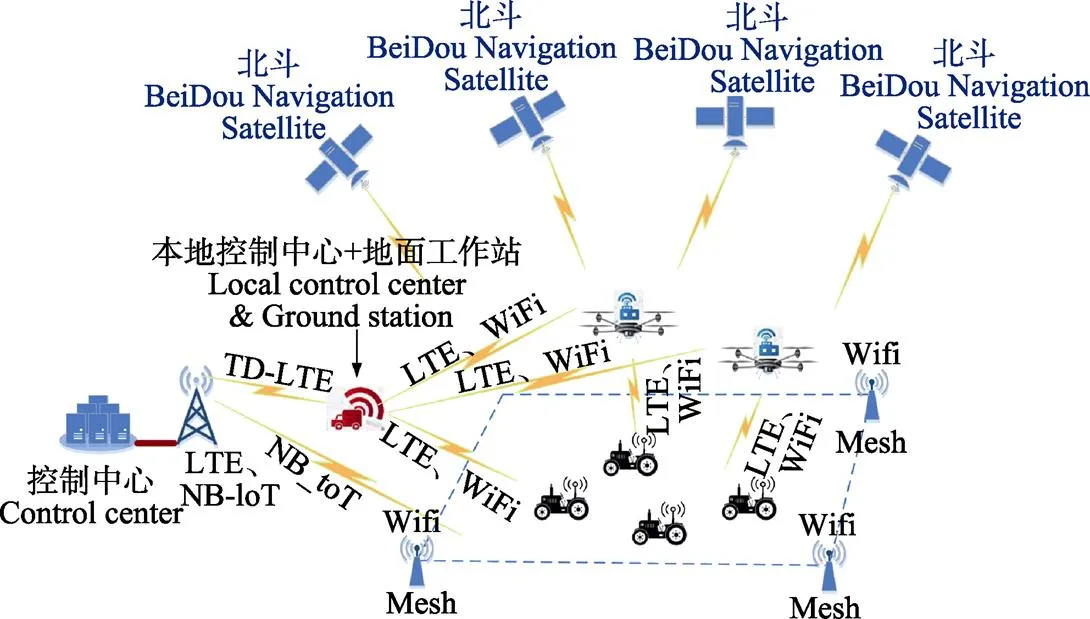
圖3 立體網絡覆蓋示意圖
空中無人機基站負責數據中繼,保證地面作業區域的移動農機網絡覆蓋,地面MESH網絡與空中無人機基站協同完成農機WiFi的網絡覆蓋,具體可以從以下幾個方面開展研究:
4.1 立體拓撲網絡
農機的作業區域有多種網絡覆蓋,自組網絡覆蓋、WiFi自組網覆蓋、TD-LTE、NB-IoT技術的覆蓋及北斗短報文衛星波束覆蓋[56]。結合基于分布式哈希表的結構化路由算法實現可控的路由走向和開放的路由架構,滿足農業組網需要。
當移動通信LTE、NB-IoT網絡有效覆蓋農機作業區域時,信號質量較好,多鏈路自組網絡的接入設備集成了4G收發模塊。能夠直接訪問移動通信網進行傳輸視頻信息、北斗差分信息;通過NB-IoT接入,可傳送圖文信息。
當公網LTE、NB-IoT網絡信號質量較差的情況下,農機上多鏈路自組網絡的接入設備能夠組成LTE自組網和WiFi MESH自組網。2類自組網通過地面工作站中繼接入中國移動4G網絡,這樣農機上的接入設備可使用移動通信網絡傳送控制中心的各類數據信息。
在移動通信信號覆蓋較差,或者其他原因地面工作站無法訪問公網時,農機作業區域內可組成自組網絡,完成區域差分信息和農機信息傳輸。地面工作站為本地數據控制中心,通過控制空中無人機基站的高度和位置實現接入設備發射功率的控制。
4.2 LTE、WiFi與MESH的多跳自組網
復雜的多跳自組網需要解決全網絡的時間同步問題[57],恰恰采用的北斗導航報文中含有精確的世界時,可以用于自組網絡的時間同步。
農機LTE組網由地面工作站、空中無人機基站、農機多鏈路接入節點組成;WiFi MESH自組網由地面和空中節點組成。節點與相鄰節點能直接通信,節點與其他節點可以通過多跳路由實現數據傳輸。
多跳路由網絡不存在一個網絡中心控制點,允許所有節點任意移動,通信質量不會因為一個節點的移動而受到影響,使用較多的就是OLSR(optimized link state routing protocol)協議。多跳組網技術組網方便快捷,提高了信道利用率。
4.3 網絡接入方式及通用網關設計方法
農業多鏈路數據傳輸網絡需要保證傳輸數據的實時性和可靠性,但由于實際應用中各網絡接入技術間相對獨立,缺乏可靠的協同機制,各鏈路間的無縫切換難以保證。這種情況下可以研究通用的WiFi、自組網LTE到公網LTE協議轉換,即通用網關協議。
對于作業區域的節點,多條鏈路(專網LTE、WiFi)數據可捆綁在一起,形成一個虛擬的鏈路,節點作為“鏈路束節點”。網絡層將鏈路束當作一條普通的鏈路,完成通信。并將多協議數據報文封裝,為高層的局域網協議通過廣域網傳輸提供一種標準機制,在數據鏈路層實現多鏈路協議的融合,為網絡層提供統一的傳輸格式和路由協議。
4.4 WiFi自組網按需路由選擇協議
目前最具代表性的按需路由方式有動態源路由協議和專用按需距離向量路由協議,這樣中間節點不用周期性的路由信息廣播,節省了一部分網絡帶寬,并且適用于能量有限的網絡環境。接下來需要研究的內容是深入分析按需驅動路由協議涉及的多請求處理、出錯處理、路由表建立及維護等。研究按需路由維護機制,適應農機作業區域自組網覆蓋。
5 復雜環境、工況農機精確自主控制方法
農機自主控制的關鍵在于解決復雜環境、工況下農機的智能調整策略和農機的自主決策。農機作業環境較為復雜,農機、農具種類多,作業類型多,耕地坡度差異,土壤附著力差異,作業時存在障礙物等,農機應能在這些復雜情況下均能精確自主運行,實現農機最佳動力匹配、農機自主控制等。
在圖1所示的系統組成圖中,集成智能操控系統完成機器學習、自主控制的任務。通過控制農機上的各種操縱機構完成自主避障路徑規劃,無人干預困境脫險[58]等工作。具體到系統實現方法上可以依靠圖4所示的策略完成。
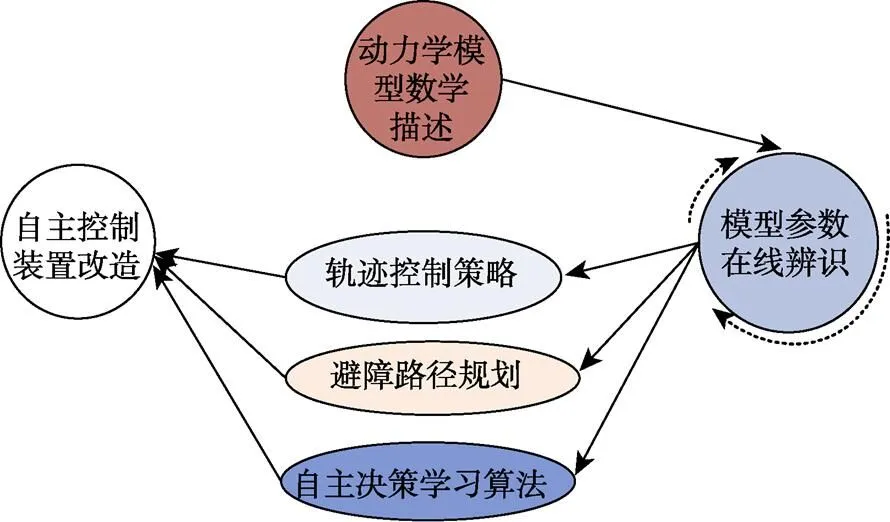
圖4 農機精確自主控制實現策略
5.1 “農機-農具-土壤”動力學特性的數學描述
對各類農機、農具、土壤力學特性進行分類分析,建立農機具多自由度動力學模型,通過理論分析和試驗研究,尋求實際農機作業條件下的降階模型,該動力學模型結構參數可能不確定[59]。針對模型參數不確定情況可以采用最小二乘遞推在線辨識的方法來解決。以實際農機狀態量與模型狀態量的差值函數最小為目標進行參數估計,不斷優化直到識別出一個在特定條件下相對精確的系統模型,
最小二乘遞推算法可以概括為取加權矩陣

(14)
(15)
5.2 研究基于動力學模型和控制律參數自調整的軌跡跟蹤控制策略
基于農機作業動力學特性設計控制策略,通過導航控制偏差預測,以未來控制偏差目標函數最小為目標,在線優化控制律參數,始終以最佳控制參數控制農機完成軌跡跟蹤。控制策略采用位置、姿態角及其導數作為狀態反饋來提高農機控制的穩定性,引入前饋控制提高機動性[60]。基于導航控制偏差預測優化控制律參數,超前調整控制律參數。
結合上述內容可以做出如圖5所示的關系:控制律1與實際農機狀態輸出構成農機作業的閉環控制,控制律1復制于當前更新的控制律2;實際農機輸出與農機待估模型的輸出之差構成目標函數,依據最小在線辨識的參數;控制律2與農機精確模型構成控制律2的參數在線調整策略,通過預測未來一段時間的導航控制偏差構成目標函數,依據最小在線優化控制律2的參數,模型2復制于當前更新的模型1。控制中通過在線模型辨識、控制律參數優化,實施適應當前作業環境與特性的最優控制。狀態反饋包括:定位信息及其導數、姿態角信息及其導數、圖像信息、轉向角等。多維控制量包括:離合、剎車、油門、換擋、轉向、懸掛等控制量。

圖5 農機控制結構圖
針對農機作業實際需要的避障等問題,依據圖像及導航綜合信息、“農機-農具”特性參數,以最小路徑、最少漏耕面積等指標實施動態路徑規劃。在避障控制以及其它特殊環境下的控制中,對控制過程進行存儲、學習,可以提高自主控制決策的能力。
動態路徑規劃基本輸入輸出為:
輸出:最優解(狀態轉移路徑),或多條備選路徑;
動作:狀態轉移估值(估價函數);
可以抽象出算法中的兩個重要概念狀態和狀態轉移估值(估價函數)。
為了能更好地給出一塊作業田地的路徑表示方式,將作業田地劃分成若干個面積相等的方格。構建出農機以及障礙物在該網格中的模型。如圖6所示,農機每次動作都有多種選擇,其初始狀態(初始位置)為,目標狀態為。
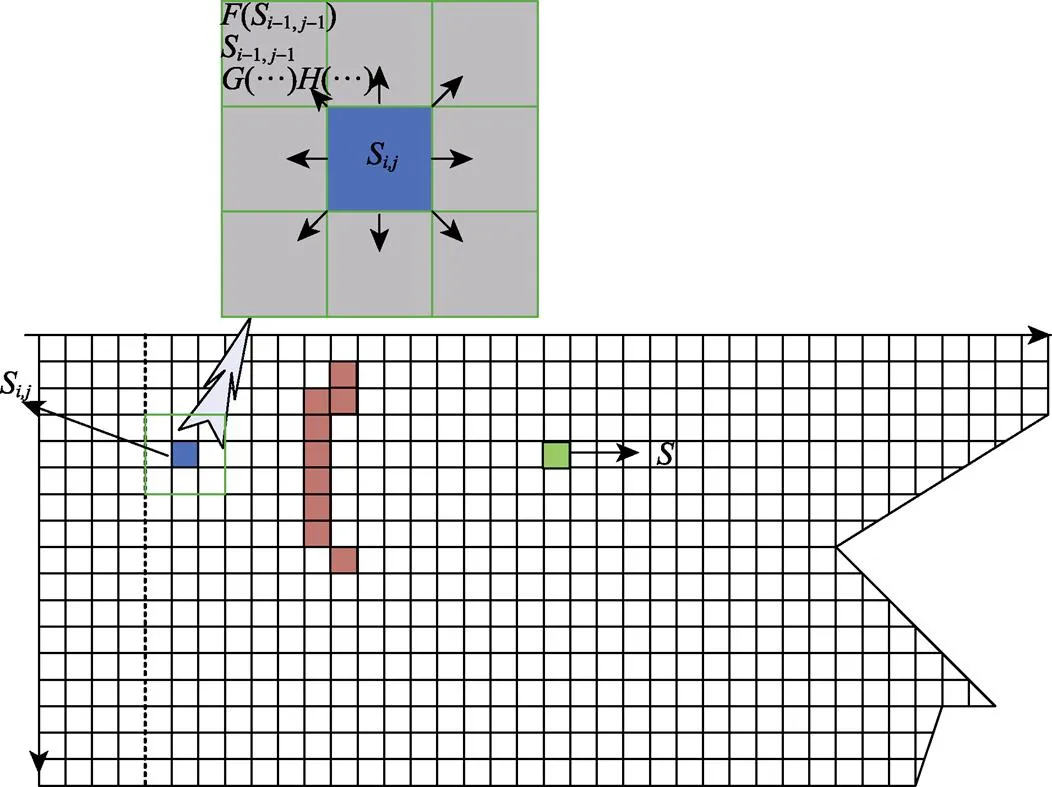
注:Si,j為當前農機所在狀態;i,j表示農機所在網格行數和列數,S為目標狀態;為了躲避障礙物,農機可以有8個選擇進入下一個狀態。每一步行動的代價函數都可以用F(Sij)=G(Sij)+H(Sij)來表示,通過迭代估計可以計算出每一步的代價,F(Si-1, j-1)為網格位置Si-1, j-1的代價。
尋路步驟如下:
狀態轉移方程:


將它從"開啟列表"中移掉,添加到"關閉列表"再繼續找出它周圍可以到達的方塊,如此循環下去[61]。
(18)
(19)
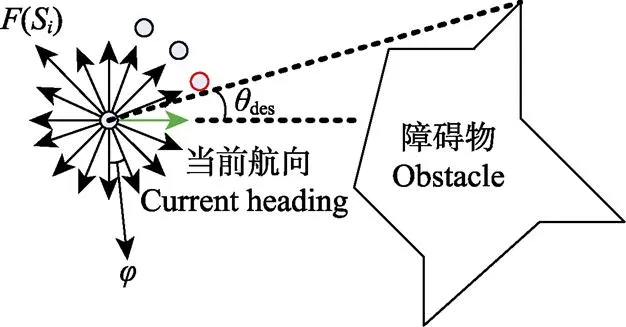
注:F(Si)為代價函數;j為農機路徑搜索步長;qdes為期望航向角,(°);為了躲避障礙,農機可以有n個選擇進入下一個狀態。每一步行動都采用式(17)-(19)給出的計算方法得出該步行動的消耗,取消耗最小值進入下一狀態。
5.4 農機試驗平臺
多學科技術方法合理性驗證需要農機試驗裝置,目前大多數試驗平臺選擇的是農用拖拉機。因為拖拉機使用環境條件相對比較好,空間開闊,便于改裝控制。這樣在模型與控制算法研究基礎上,可以構建農機自主控制裝置,并安裝于拖拉機平臺完成自主控制試驗。通過改裝拖拉機的轉向、變速、離合和剎車等,能夠實現拖拉機的自動駕駛。圖8展示了一套農機精確控制系統組成原理。一般自主控制農機裝備由集成控制電子單元(ECU)、農機控制執行單元、農機平臺、輔助測量傳感器等組成。

圖8 試驗平臺組成
集成控制電子單元包括:數據通信單元,模型參數在線辨識單元,控制律參數在線調整單元,綜合控制單元、狀態測量與回路控制單元。各單元之間通過內部總線進行數據通信,數據通信單元讀取農機導航指令、定位信息、姿態信息、圖像信息等。
農機控制執行單元包括:離合、剎車、油門、換擋控制執行器,轉向、懸掛液壓控制系統等。農機控制執行單元將傳感器信號反饋給集成控制電子單元,并接受集成控制電子單元發送的離合、剎車、油門、換擋、轉向、懸掛等自動控制信號。
輔助測量傳感器包括:轉向傳感器,輪速傳感器,懸掛加裝的力和位移傳感器[65-66]。在轉向控制策略中,通過比較轉向控制模式1(采用轉向傳感器作為內閉環反饋的控制模式[67-68])和轉向控制模式2(僅采用姿態角信號作為轉向控制反饋的控制模式[69-70])的控制效果,盡量減少傳感器數量。四個輪速傳感器用于模型降階研究,車輛動力學模型可以表達為具有車身6自由度、底盤懸架4自由度、四輪轉速4自由度等的多自由度模型,需要根據農機控制特點進行降階,輪速傳感器用于建模分析和模型降階研究,最終自主控制策略可以不需要輪速反饋。
設計智能農機試驗裝置應該體現下列先進性:
1)控制的穩定性。可以引入農機坐標信息及其導數、姿態角信息及其導數等構成狀態反饋,使用更多狀態量的導數信息,一定程度上在航向控制穩定性、軌跡偏差控制等方面性能會有所提高。
2)在線調整控制律參數,滿足多場景使用要求。依據當前“農機-農具-土壤”動力學特性,在線優化控制律參數,始終以符合當前特性的最佳控制參數實施控制。
3)農機自主決策。農機自動控制應該可以實現農機最佳動力匹配、農機人工智能控制、自動導航控制等。
6 結 論
現代智能農機應用到導航,控制,圖像以及數據鏈等技術,各項工程技術之間有穿插和重疊。基于車輛運動約束的導航誤差校正方法和全向及雙目場景目標高維特征提取方法為精確軌跡跟蹤控制提供了條件,數據鏈保證了各部分數據的高效可靠傳輸,為遠程操作提供了可能。近年來多傳感器信息融合技術越來越多的應用到各行業的定位與導航系統中并取得了較好的實現效果。可見應用基于誤差精確建模的緊組合導航方式結合多傳感器信息融合技術是自動導航系統研究的主要方向。在農機視覺圖像處理領域應用數學中的小波變換和多尺度理論能較好的進行目標識別。將用于航空航天的導航技術、全向機器視覺技術、機械電子技術以及飛行控制技術等國防科學技術應用于智能農業中,必將顯著提高中國農機行業技術水平,具有較高科研價值,又能很好的響應國家軍民融合的發展戰略。下一步還可以探索多機協調工作實現方案,為以后中國農民土地合理流轉,規模化經營打下了技術基礎,將大大降低勞動強度,提高勞動生產率。
同時多學科技術融合的智能農機也將會為其他交通車輛的智能化提供技術借鑒,車輛的機器視覺和機器學習結合互聯網技術將產生巨大的影響力,改變多個行業的運營模式,并帶來了汽/柴油等化石能源消耗的大幅度降低,起到降耗減排的效果;有效保護生態環境。促進資源節約型、環境友好型社會的快速發展,產生較高的社會和生態效益。
[1] 中國機械工業年鑒編輯委員會. 中國機械工業年鑒2013[M]. 北京:機械工業出版社,2013.
[2] Ortiz B V, Balkcom K B, Duzy L, et al. Evaluation of agronomic and economic benefits of using RTK-GPS-based auto-steer guidance systems for peanut digging operations[J]. Precision Agriculture, 2013(14): 357-375.
[3] O'Connor M, Bell T, Elkaim G, et al. Automatic steering of farm vehicles using GPS[J]. Intl. conf. precision Agriculture, 1996.
[4] Noguchi N, Terao H, Sakata C. Performance improvement by control of flow rates and diesel injection timing on dual-fuel engine with ethanol[J]. Bioresource Technology, 1996, 56(1): 35-39.
[5] Eaton R, Pota H, Katupitiya J. Path tracking control of agricultural tractors with compensation for steering dynamics[C]// 48th IEEE Conference on Decision & Control, China, 2009: 7357-7362
[6] Payne M L, Hung J Y, Bevly D M. Control of a robot-trailer system using a single non-collocated sensor[C]// 38th Annual Conference on IEEE Industrial Electronics Society, 2012: 2674-2679
[7] Derrick J B, Bevly D M. Adaptive steering control of a farm tractor with varying yaw rate properties[J]. Journal of Field Robotics, 2009, 26(6): 519-536.
[8] Bergerman M, Maeta S M, Zhang J, et al. Robot farmers: autonomous orchard vehicles help tree fruit production[J]. Robotics & Automation Magazine IEEE, 2015, 22(1): 54-63.
[9] Stombaugh T, Benson E R, Hummel J W. Automatic guidance of agricultural vehicles at high field speeds[C]// 1998 ASAE Annual International Meeting, Orlando: 1998: 537-544.
[10] Montero J I, Henten E J V, Son J E, et al. Greenhouse engineering: new technologies and approaches[J]. Acta Horticulturae, 2011, 893(893): 51-63.
[11] Kondo N, Yata K, Iida M, et al. Development of an end-effecter for a tomato cluster harvesting robot[J]. Engineering in Agriculture, Environment and Food, 2010, 3(1): 20-24.
[12] Fakharian A, Gustafsson T, Mehrfam M. Adaptive kalman filtering based navigation: An IMU/GPS integration approach[C]// IEEE International Conference on Networking, Sensing and Control (ICNSC), 2011: 181-185.
[13] Xiong Z, Chen L, Juan H E, et al. Small agricultural machinery path intelligent tracking control based on fuzzy immune PID[J]. Jiqiren/robot, 2015, 37(2): 212-223.
[14] 羅錫文,張智剛,趙作喜,等. 東方紅X-804拖拉機的DGPS自動導航控制系統[J]. 農業工程學報,2009,25(11):139-145. Luo Xiwen, Zhang Zhigang, Zhao Zuoxi, et al. Design of DGPS navigation control system for dong fang hong X-804 tractor[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2009, 25(11): 139-145. (in Chinese with English abstract)
[15] 黃沛琛,羅錫文,張智剛. 改進純追蹤模型的農業機械地頭轉向控制方法[J]. 計算機工程與應用,2010,46(21):216-219. Huang Peichen, Luo Xiwen, Zhang Zhigang. Agricultural machinery steering control method based on improved pure tracking model[J]. Computer Engineering and Applications, 2010, 46(21): 216-219. (in Chinese with English abstract)
[16] 羅錫文,張智剛,胡煉,等. 4種DGPS模塊動態定位精度測試與分析[J]. 華南農業大學學報,2010,31(1): 102-107. Luo Xiwen, Zhang Zhigang, Hu Lian, et al. Measurement and analysis of dynamic positioning accuracy of four DGPS modules[J]. Journal of South China Agricultural University, 2010, 31(1): 102-107. (in Chinese with English abstract)
[17] 李逃昌,胡靜濤,高雷,等. 基于模糊自適應純追蹤模型的農業機械路徑跟蹤方法[J]. 農業機械學報,2013,44(1):205-210. Li Taochang, Hu Jingtao, Gao Lei, et al. Agricultural machine path tracking method based on fuzzy adaptive pure pursuit model[J]. Transactions of the Chinese Society for Agricultural Machinery, 2013, 44(1): 205-210. (in Chinese with English abstract)
[18] 李逃昌. 基于級聯式控制策略的農業機械自動導航控制方法研究[D].北京:中國科學院大學,2014. Li Taochang. Research on Automatic Navigation Control Method Based on Cascade Control Strategy for Agricultural Machinery[D]. Beijing: University of Science and Technology of China, 2014.(in Chinese with English abstract)
[19] 白曉平,胡靜濤,高雷,等. 農機導航自校正模型控制方法研究[J]. 農業機械學報,2015,46(2):1-7. Bai Xiaoping, Hu Jingtao, Gao Lei, et al. Self-tuning model control method for farm machine navigation[J]. Transactions of the Chinese Society for Agricultural Machinery, 2015, 46(2): 1-7. (in Chinese with English abstract)
[20] 劉繼展,劉煒,毛罕平,等. 面向立柱栽培的機器人移栽苗序與路徑分析[J]. 農業工程學報,2014,30(5):28-35. Liu Jizhan, Liu Wei, Mao Hanping, et al. Preparation and path analysis of robot transplantation for column cultivation[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2014, 30(5): 28-35. (in Chinese with English abstract)
[21] 偉利國,張權,顏華,等. XDNZ630型水稻插秧機GPS自動導航系統[J]. 農業機械學報,2011,42(7):186-190. Wei Liguo, Zhang Quan, Yan Hua, et al. GPS automatic navigation system design for XDNZ630 rice transplanter[J]. Transactions of the Chinese Society for Agricultural Machinery, 2011, 42(7): 186-190. (in Chinese with English abstract)
[22] 權龍哲,張冬冬,查紹輝,等. 三臂多功能棚室農業機器人的運動學分析及試驗[J]. 農業工程學報,2015,31(13):32-38. Quan Longzhe, Zhang Dongdong, Zha Shaohui, et al. Kinematics analysis and experiment of multifunctional agricultural robot in greenhouse with three arms[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(13): 32-38. (in Chinese with English abstract)
[23] Dickson M A, Zhang Q. Sensor-fusion navigator for automated guidance of off-road vehicles: United States Patent: US6445983[P]. 2002-09-03.
[24] 耿效華. 發展我國農業機械自動化、信息化和智能化的必要性和重點領域[J]. 中國農機化學報,2007(5):50-52. Geng Xiaohua. The necessity and key fields of developing agricultural machinery automation, information and intelligence in China[J]. Journal of Chinese Agricultural Mechanization, 2007(5): 50-52. (in Chinese with English abstract)
[25] Shearer S A, Pitla S K, Luck J D. Trends in the automation of agricultural field machinery[C]//In Proc. of the 21st Annual Meeting of the Club of Bologna, Italy, 2010.
[26] 卞鴻巍,李安,覃方君,等. 現代信息融合技術在組合導航中的應用[M]. 北京:國防工業出版社,2010.
[27] 秦永元. 慣性導航[M]. 北京:科學出版社,2006.
[28] Yang L, Noguchi N, Takai R. Development and application of a wheel-type robot tractor[J]. Engineering in Agriculture Environment & Food, 2016, 9(2): 131-140.
[29] 姜國權,柯杏,杜尚豐,等. 基于機器視覺的農田作物行檢測[J]. 光學學報,2009,29(4):1015-1020. Jiang Guoquan, Ke Xing, Du Shangfeng, et al. Crop row detection based on machine vision[J]. Acta Optica Sinica, 2009, 29(4): 1015-1020. (in Chinese with English abstract)
[30] 張磊. 基于機器視覺的農田區域邊界和障礙物檢測方法的研究[D]. 北京:中國農業大學,2007. Zhang Lei. Study on the Detection Method of Farmland Boundary and Obstacle Based on Machine Vision[D]. Beijing: China Agricultural University, 2007. (in Chinese with English abstract)
[31] 張磊,王書茂,陳兵旗. 基于機器視覺的麥田邊界檢測[J]. 農業機械學報,2007,38(2):111-114. Zhang Lei, Wang Shumao, Chen Bingqi. Wheat border detection based on machine vision[J]. Transactions of the Chinese Society for Agricultural Machinery, 2007, 38(2): 111-114. (in Chinese with English abstract)
[32] Wu Tong, Xu Gongxian. Path following for a tractor-trailer system using sliding mode control[J]. Journal of Bohai University:Natural Science Edition, 2016, 37(2): 172-176.
[33] Li L, Wei X, Zhu W, et al. Research on auxiliary navigation system for wide spraying mechanism based on machine vision[J]. Nongye Jixie Xuebao/transactions of the Chinese Society of Agricultural Machinery, 2015, 46(9):28-33.
[34] Wang F, Zheng J, Tang Y. Analysis on application and research progress of machine vision in agriculture in China[J]. Shandong Agricultural Sciences, 2016, 48(4): 139-144.
[35] Liu C M, Lee C H, Wang L C. Distributed clustering algorithms for data-gathering in wireless mobile sensor networks[J]. Journal of Parallel Distributed Computing, 2007, 67(11): 1187-1200
[36] Yang J, Jiang Y G, Hauptmann A G, et al. Evaluating bag-of-vision words representations in scene classification[C]// Proceedings of international workshop on Multimedia Information Retrieval, New York, USA, 2007: 197-206.
[37] 王君秋,査紅彬. 結合興趣點和邊緣的建筑物和物體識別方法[J]. 計算機輔助設計與圖形學學報,2007,18(8): 1257-1263. Wang Junqiu, Zha Hongbin. Building and object recognition method combining interest points and edges[J]. Journal of Computer-Aided Design and Computer Graphics, 2007,18(8): 1257-1263. (in Chinese with English abstract)
[38] 孫元義,張紹磊,李偉. 棉田噴藥農業機器人的導航路徑識別[J]. 清華大學學報:自然科學版,2007,47(2): 206-209. Sun Yuanyi, Zhang Shaolei, Li Wei. Guidance lane detection for pesticide spraying robot in cotton fields[J]. Journal of Tsinghua University: Science and Technology, 2007, 47(2): 206-209. (in Chinese with English abstract)
[39] 王曉燕,陳媛,陳兵旗,等. 免耕覆蓋地秸稈行茬導航路徑的圖像檢測[J]. 農業機械學報,2009,40(6):158-163. Wang Xiaoyan, Chen Yuan, Chen Bingqi, et al. Detection of stubble row and inter-row line for computer vision guidance in no-till field[J]. Transactions of the Chinese Society for Agricultural Machinery, 2009, 40(6): 158-163. (in Chinese with English abstract)
[40] Bouveyron C, Girard S, Schmid C. High-dimensional data clustering[J]. Computational Statistics & Data Analysis, 2006, 52(1): 502-519.
[41] 于成龍. 基于特征提取的特征選擇研究[D]. 南京:南京郵電大學,2011. Yu Chenglong. Feature Selection Based on PCA[D]. Nanjing: Nanjing University of Posts and Telecommunications, 2011. (in Chinese with English abstract)
[42] Naikal N, Yang A Y, Sastry S S. Informative feature selection for object recognition via sparse PCA[C]// IEEE International Conference on Computer Vision. IEEE, 2011: 818-825.
[43] 賀玲,蔡益朝,楊征. 高維數據聚類方法綜述[J]. 計算機應用研究,2010,27(1):23-26.
[44] 范玉華. 面向圖像理解的特征信息優化表達及場景目標識別與分析[D]. 北京:北京航空航天大學,2013. Fan Yuhua. Scene Object Recognition and Analysis with Optimizing Representation of Features for Image Understanding[D]. Beijing: Beihang University, 2013. (in Chinese with English abstract)
[45] Agrawal R, Gehrke J, Gunopulos D, et al. Automatic subspace clustering of high dimensional data for data mining applications[C]// Proc of ACMSIGMOD Conference. Seattle. WA, 1998: 94-105.
[46] Chen C H, Fu A W, Zhang Y. Entropy-based subspace cluste-ring for mining numerical data[C]// Proc of the 5th ACM SIGKDD. San Diego, CA, 1999: 84-93.
[47] Nagesh H, Goil S, Choud A, et al. Adaptive grids for cluste-ring massive data sets[C]// Proc of the 1st SIAM ICDM. Chicago, IL, 2001.
[48] Fern X Z, Brodley C E. Random projection for high dimensional data clustering: A cluster ensemble approach[C]//Machine Learning, Proceedings of the Twentieth International Conference. DBLP, 2003: 186-193.
[49] Sun D, Chen D, Wang S, et al. A dynamic instability detection and prediction system for high clearance tractor[J]. Ifac Papers Online, 2016, 49(16): 50-54
[50] Zhang Z. Flexible camera calibration by viewing a plane from unknown orientations[C]// The Proceedings of the Seventh IEEE International Conference on Computer Vision. IEEE, 2002: 666-673.
[51] Cheein F A, Steiner G, Carelli P G, et al. Optimized EIF-SLAM algorithm for precision agriculture mapping based on stems detection[J]. Computers & Electronics in Agriculture, 2011, 78(2): 195-207.
[52] Drenjanac D, Tomic S, Agüera J. Wi-Fi and satellite-based location techniques for intelligent agricultural machinery controlled by a human operator[J]. Sensor, 2014, 14(10): 19767-19784.
[53] 張開生,田開元,呂明,等. 基于物聯網技術的農業大棚環境監控系統設計[J]. 西安科技大學學報,2015,35(6):805-811. Zhang Kaisheng, Tian Kaiyuan, Lv Ming, et al. Design of agricultural greenhouse environment monitoring system based on Internet of things[J]. Journal of Xi'an University of Science and Technology, 2015, 35(6): 805-811. (in Chinese with English abstract)
[54] 趙鵬飛. 自組織路由技術在農業數據無線傳輸中的應用研究[D]. 南京:南京農業大學,2008. Zhao Pengfei. Application of Self Organizing Routing Technology in Wireless Transmission of Agricultural Data[D]. Nanjing: Nanjing Agricultural University, 2008. (in Chinese with English abstract)
[55] 何鵬舉,戴冠中,傅磊,等. 遠程網絡化測控系統研究與實現[J]. 微電子學與計算機,2006,23(7):195-198. He Pengju, Dai Guanzhong, Fu lei, et al. Research and implementation of remote networked measurement and control system[J]. Microelectronics & Computer, 2006, 23(7): 195-198. (in Chinese with English abstract)
[56] Lauridsen M, Kovács I, Mogensen P E, et al. Coverage and capacity analysis of LTE-M and NB-IoT in a rural area[C]// IEEE 84th Vehicular Technology Conference Vehicular Technology Conference, Montreal, 2016: 56-67.
[57] 劉思偉,趙玉亭,慕德俊. 無人機多跳自組網實時視頻傳輸性能評[J]. 計算機應用,2007,27(10):2398-2400. Liu Siwei, Zhao Yuting, Mu Dejun. Performance evaluation of real time video transmission in UAV multi hop ad hoc networks[J]. Journal of Computer Applications, 2007, 27(10): 2398-2400. (in Chinese with English abstract)
[58] 汪明磊,陳無畏,王家恩. 智能車輛車道保持系統中避障路徑規劃[J]. 合肥工業大學學報自然科學版,2014(2): 129-133.
Wang Minglei, Chen Wuwei, Wang jiaen. Obstacle avoidance path planning for intelligent vehicle lane keeping system[J]. Journal of Hefei University of Technology (Natural Science), 2014(2): 129-133. (in Chinese with English abstract)
[59] 張聞宇,丁幼春,王雪玲,等. 基于SVR逆向模型的拖拉機導航純追蹤控制方法[J]. 農業機械學報,2016,47(1):29-36. Zhang Wenyu, Ding Youchun, Wang Xueling, et al. Pure tracking control method for tractor navigation based on SVR inverse model[J]. Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(1): 29-36. (in Chinese with English abstract)
[60] 袁朝輝,張娟. 飛機操縱前輪轉向模糊控制仿真研究[J]. 系統仿真學報,2008,20(17):4509-4513. Yuan Zhaohui, Zhang Juan. Simulation study on fuzzy control of aircraft steering wheel steering[J]. Journal of System Simulation, 2008, 20(17): 4509-4513. (in Chinese with English abstract)
[61] Meng Z, Huang P, Yan J. Trajectory planning for hypersonic vehicle using improved sparse A* algorithm[C]//IEEE/ ASME International Conference on Advanced Intelligent Mechatronics, 2008, 28(2): 1152-1157.
[62] 吳天羿,許繼恒,劉建永,等. 基于改進A*算法的越野路徑規劃研究[J]. 計算機應用研究,2013,30(6):1724-1726 Wu Tianyi, Xu Jiheng, Liu Jianyong, et al. Research on cross-country path planning based on improved A* algorithm[J]. Application Research of Computer, 2013, 30(6): 1724-1726. (in Chinese with English abstract)
[63] 辛煜,梁華為,杜明博,等. 一種可搜索無限個鄰域的改進A*算法[J]. 機器人,2014,36(5):627-633. Xin Yu, Liang Huawei, Du Mingbo, et al. An improved A* algorithm for searching infinite neighborhood[J]. Robot, 2014, 36(5): 627-633. (in Chinese with English abstract)
[64] Henten E J V, Hemming J, Tuijl B A J V, et al. An autonomous robot for harvesting cucumbers in green houses[J]. Autonomous Robots, 2002, 13(3): 241-258.
[65] Cariou C, Lenain R, Thuilot B, et al. Motion planner and lateral-longitudinal controllers for autonomous maneuvers of a farm vehicle in headland[C]//2009 IEEE/RSJ International Conference on Intelligent Robots and Systems, USA, 2009: 5782-5787.
[66] Cariou C, Lenain R, Thuilot B, et al. Autonomous maneuver of a farm vehicle with a trailed implement: motion planner and lateral-longitudinal controllers[C]//2010 IEEE International Conference on Robotics and Automation Anchorage Convention District, Anchorage, 2010: 3819-3824.
[67] 陳文良,宋正河,毛恩榮. 拖拉機自動駕駛轉向控制系統的設計[J]. 華中農業大學學報,2005,10:57-62. Chen Wenliang, Song Zhenghe, Mao Enrong. Design of automatic steering control system of tractor[J]. Journal of Huazhong Agricultural University, 2005, 10: 57-62. (in Chinese with English abstract)
[68] 黎永鍵,趙祚喜,高俊文,等. 東方紅拖拉機電控液壓轉向系統設計及試驗研究[J]. 農機化研究,2016(11):246-251. Li Yongjian Zhao Zhuoxi, Gao Junwen, et al. Design and experimental study of electro hydraulic steering system for Dongfanghong tractor[J]. Journal of Agricultural Mechanization Research, 2016(11): 246-251. (in Chinese with English abstract)
[69] Javad R, Hossein N, Mahdi R. et al. Automatic guidance of an agricultural tractor along with the side shift control of the attached row crop cultivator[J]. Journal of Agricultural Science and Technology, 2012, 2(1): 151-158.
[70] Zheng B, Anwar S. Yaw stability control of a steer-by-wire equipped vehicle via active front wheel steering[J]. Mechatronics, 2009, 19(6): 799-804.
Research on intelligent agricultural machinery control platform based on multi-discipline technology integration
Dong Sheng1, Yuan Zhaohui1※, Gu Chao2, Yang Fang3
(1.7100722.7100653.471023,)
The meaning of agricultural machinery automation and intellectualization includes a wide range of content, involving a large number of engineering disciplines, such as navigation, images, models and strategies, actuators and data chain. The intellectualization of agricultural machinery is the symbol of a country’s engineering and technical strength. How to co-ordinate the multidisciplinary technologies and reasonably integrate them into a system is the key to the success of intelligent agricultural machinery. According to the requirements of the development of land scale management in China, intelligent agricultural machinery should use advanced technology in the aeronautics, astronautics and ground to achieve high-speed computing and transmission of data information in a dynamic environment, and to command the actuator to complete the tasks efficiently and effectively. In recent years, the research on intelligent agricultural machinery has been mainly concentrated on vision measuring, image processing, trajectory tracking and vehicle navigation, pattern recognition and their application, and so on, which have focused on image information acquisition method, image processing and recognizing algorithm, intelligent navigation algorithm and system integration application, and so on. The technology of automatic steering control, obstacle detection and active obstacle avoidance, and multi machine cooperative navigation, and the technology of agricultural machinery will be the focus of the next generation of intelligent agricultural machinery. This paper studied the Beidou enhanced network and network RTK (real-time kinematic) method to improve the accuracy of positioning and navigation technology, accurately modeled and compensated aiming at the inertial navigation error of agricultural machinery, and prolonged the working time of positioning. The dynamic model of agricultural machinery was established, and the parameters of the model were identified on the basis of the actual situation. Based on the constraint conditions, the knowledge learning and decision control technology was introduced into the agricultural machinery. And then combined with machine vision, the perception of the working environment and operating objects was enhanced, and the image recognition algorithm was used to assist navigation and control. Finally, according to the requirements of remote monitoring, and navigation and positioning for data transmission, the realization of data transmission technology of three-dimensional topology was studied so as to ensure the real-time data fusion of various technical units. The invention disclosed a set of intelligent device with electromechanical integration. It was equipped with a multi-source fusion intelligent controller based on the dynamic model of agricultural machinery, and an inertial navigation system, which could effectively isolate the disturbance of agricultural machinery to achieve stable tracking and the combination of WIFI and the new generation of Internet of Things to complete the multi-link data communication. According to the dynamic analysis of agricultural machinery, the data model was obtained. The model structure was determined, but the parameters were uncertain. The model parameters could be obtained by on-line identification on the basis of the minimum value of the difference between the actual state and the model state. Then the control strategy was designed according to the model. Based on the navigation control error prediction, the control law parameters were optimized through minimizing the objective function of the future control deviation, and the trajectory tracking of agricultural machinery would be always controlled with the best control parameters. Agricultural navigation used the tight integrated navigation technology of Beidou plus IMU (inertial measurement unit), and machine vision was taken as an aid. Based on the enhanced technology of mobile network base station of Beidou Foundation and high precision standard inertial navigation system for precision agriculture applications, the continuity and reliability of navigation and positioning information were ensured, which laid the foundation for the use of intelligent agricultural machinery in remote sensing areas. Therefore, the agricultural machinery in the next period will be more intelligent and easy in operation. New farmers in the Farm Hall will command all kinds of agricultural machines to carry out operations in a variety of environmental conditions, and monitor agricultural machinery in a few kilometers or tens of kilometers away in real time, which greatly reduce the burden on farmers, and achieve high efficiency, standardization and hommization, and also provide some technical references for the development of other industries.
agricultural machinery; navigation; machine vision; positioning; data link; multi-discipline technology integration
10.11975/j.issn.1002-6819.2017.08.001
TP273
A
1002-6819(2017)-08-0001-11
2017-03-16
航空科學基金(MIMU/單星偽距偽距率組合導航技術(20165853041))
董 勝,男,河南確山人,博士生,主要研究方向為儀器儀表與自動控制。西安 西北工業大學自動化學院710072。Email:dongshengzaixian@163.com
袁朝輝,男,漢族,安徽舒城人,教授、博士生導師,主要研究方向為機電液一體化。西安 西北工業大學自動化學院 710072。Email:13992852669@139.com
董 勝,袁朝輝,谷 超,楊 芳.基于多學科技術融合的智能農機控制平臺研究綜述[J]. 農業工程學報,2017,33(8):1-11. doi:10.11975/j.issn.1002-6819.2017.08.001 http://www.tcsae.org
Dong Sheng, Yuan Zhaohui, Gu Chao, Yang Fang.Research on intelligent agricultural machinery control platform based on multi-discipline technology integration[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(8): 1-11. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2017.08.001 http://www.tcsae.org
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
