鐵氧體永磁輔助式磁阻伺服電機(jī)齒槽轉(zhuǎn)矩研究
2017-05-04 07:15:06李新華張家思劉進(jìn)超
微特電機(jī) 2017年7期
李新華,張家思,劉進(jìn)超
(湖北工業(yè)大學(xué),武漢430068)
0 引 言
鐵氧體永磁輔助式同步磁阻電動機(jī)分為異步起動和同步起動兩種,可應(yīng)用于恒速和變速場合,在工業(yè)、交通等領(lǐng)域有廣泛的應(yīng)用空間[1-4]。近年來,人們也在研究鐵氧體永磁輔助式同步磁阻伺服電機(jī)[5-6](以下簡稱鐵氧體伺服電機(jī))。與目前廣泛使用的釹鐵硼永磁同步伺服電機(jī)(以下簡稱釹鐵硼伺服電機(jī))相比,鐵氧體伺服電機(jī)有很多優(yōu)點(diǎn),特別是永磁材料成本較低;另一方面,傳統(tǒng)永磁伺服電機(jī)大多采用分布繞組,從降低人工下線成本的角度考慮,現(xiàn)在人們越來越多地關(guān)注集中繞組永磁伺服電機(jī)[7-8]。如果將集中繞組應(yīng)用于鐵氧體伺服電機(jī),可以進(jìn)一步降低制造成本,提升產(chǎn)品競爭力。
伺服電機(jī)齒槽轉(zhuǎn)矩是人們比較關(guān)注的一個問題,它直接影響伺服系統(tǒng)的控制精度。齒槽轉(zhuǎn)矩是永磁電機(jī)由于齒槽對應(yīng)氣隙磁導(dǎo)的變化所產(chǎn)生的轉(zhuǎn)矩。與釹鐵硼伺服電機(jī)一般用表貼式轉(zhuǎn)子不同,鐵氧體伺服電機(jī)則為內(nèi)置式、多層轉(zhuǎn)子結(jié)構(gòu),且采用磁性能相對較弱的鐵氧體永磁材料,這些變化都會對電機(jī)齒槽轉(zhuǎn)矩產(chǎn)生影響。
本文使用計算機(jī)仿真方法研究分布繞組和集中繞組鐵氧體伺服電機(jī)的齒槽轉(zhuǎn)矩以及降低鐵氧體伺服電機(jī)齒槽轉(zhuǎn)矩的措施,并與表貼式釹鐵硼伺服電機(jī)的齒槽轉(zhuǎn)矩進(jìn)行比較分析。
1 分布繞組鐵氧體伺服電機(jī)
釹鐵硼伺服電機(jī)極數(shù)有6,8,10極等,而鐵氧體伺服電機(jī)的極數(shù)不能太多。這是因?yàn)闃O數(shù)越多,鐵氧體伺服電機(jī)的轉(zhuǎn)子結(jié)構(gòu)越復(fù)雜,轉(zhuǎn)子沖片模具及裝配成本就越高,一般用4,6極比較合適。與釹鐵硼伺服電機(jī)一樣,鐵氧體伺服電機(jī)也用分?jǐn)?shù)槽繞組降低齒槽轉(zhuǎn)矩。下面比較4,6極分?jǐn)?shù)槽繞組鐵氧體伺服電機(jī)的齒槽轉(zhuǎn)矩。圖1給出了1.5 kW,二種極槽配合鐵氧體伺服電機(jī)的仿真模型,轉(zhuǎn)子都采用內(nèi)置三層“U”字形布局。圖2為其齒槽轉(zhuǎn)矩仿真結(jié)果。
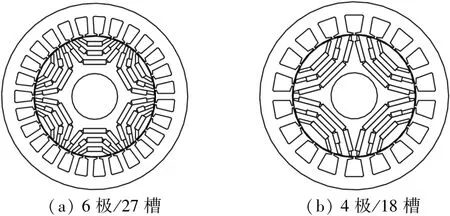
圖1 4,6極鐵氧體伺服電機(jī)的仿真模型
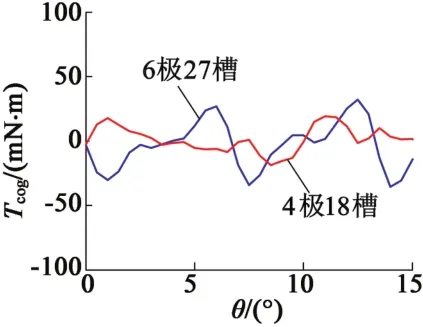
圖2 6極/27槽,4極/18槽電機(jī)齒槽轉(zhuǎn)矩
由圖2可見,6極/27槽鐵氧體伺服電機(jī)齒槽轉(zhuǎn)矩的峰峰值(以下省去峰峰值)為72 mN·m,4極18槽電機(jī)的齒槽轉(zhuǎn)矩為40 N·m。兩電機(jī)每極每相槽數(shù)q=1.5,但4極鐵氧體伺服電機(jī)的齒槽轉(zhuǎn)矩反而比6極的小,因此,從減小鐵氧體伺服電機(jī)齒槽轉(zhuǎn)矩和簡化轉(zhuǎn)子結(jié)構(gòu)的角度來看,選用4極是合適的。
相同極數(shù)條件下極槽配合的選擇對鐵氧體伺服電機(jī)齒槽轉(zhuǎn)矩影響很大。圖3是4極/21槽與4極/18槽鐵氧體伺服電機(jī)齒槽轉(zhuǎn)矩的仿真結(jié)果。4極/21槽鐵氧體伺服電機(jī)齒槽轉(zhuǎn)矩為24 mN·m,4極18槽電機(jī)齒槽轉(zhuǎn)矩為40 mN·m。同為4極電機(jī),但q不同,前者為1.75,后者為1.5,q值大的4極/21槽鐵氧體伺服電機(jī)齒槽轉(zhuǎn)矩更小,可見,4極/21槽是分布繞組鐵氧體伺服電機(jī)比較好的一個極槽配合。
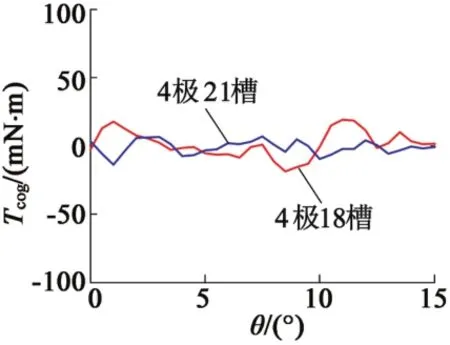
圖3 4極/21槽,4極/18槽電機(jī)齒槽轉(zhuǎn)矩
圖4是鐵氧體伺服電機(jī)轉(zhuǎn)子一個極下不同內(nèi)置槽布局示意圖。仿真結(jié)果表明,兩種轉(zhuǎn)子的齒槽轉(zhuǎn)矩相差不大,大約為25 mN·m,但寬“一”字形轉(zhuǎn)子電機(jī)的轉(zhuǎn)矩脈動率為5.04%,窄“一”字形轉(zhuǎn)子電機(jī)的轉(zhuǎn)矩脈動率為2.43%,減小了一半多,如圖5所示。這是由于兩種轉(zhuǎn)子的氣隙磁密畸變率不同,前者為39%,后者為32%,如圖6所示。故窄“一”字形轉(zhuǎn)子鐵氧體伺服電機(jī)反電動勢和電樞電流波形更好,脈動轉(zhuǎn)矩較低。
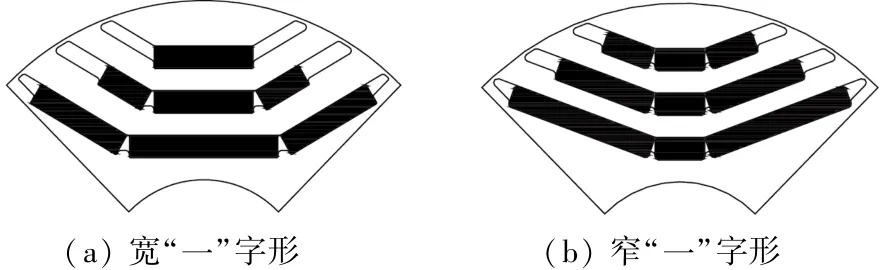
圖4 一個極下不同內(nèi)置槽布局示意圖
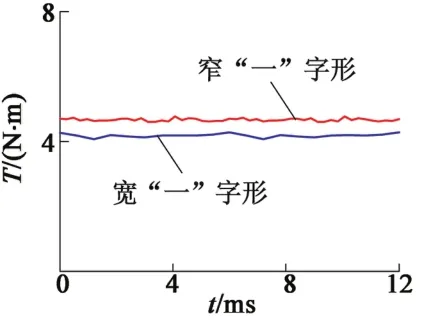
圖5 兩種轉(zhuǎn)子電機(jī)的電磁轉(zhuǎn)矩仿真
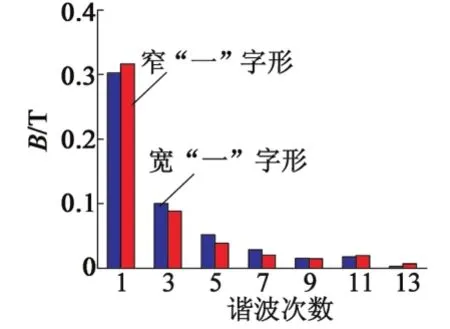
圖6 兩種轉(zhuǎn)子電機(jī)氣隙磁密的傅里葉分析
此外,采用定子斜槽和定子鐵心開輔助槽都可以降低分布繞組永磁輔助伺服電機(jī)的齒槽轉(zhuǎn)矩。
2 集中繞組鐵氧體伺服電機(jī)
傳統(tǒng)永磁伺服電機(jī)大多用分布繞組。分布繞組電機(jī)需要人工下線,生產(chǎn)效率較低,制造成本增加,而且分布繞組端部較長,增加了銅線的材料成本。集中繞組伺服電機(jī)可以實(shí)現(xiàn)自動繞線,降低制造成本。
與分布繞組鐵氧體伺服電機(jī)一樣,集中繞組鐵氧體伺服電機(jī)一般用4,6極比較合適。圖7給出了750 W,極槽配合分別為6極/9槽和4極/6槽鐵氧體伺服電機(jī)的仿真模型,轉(zhuǎn)子都采用內(nèi)置三層“U”字形布局。圖8為其齒槽轉(zhuǎn)矩的仿真結(jié)果。
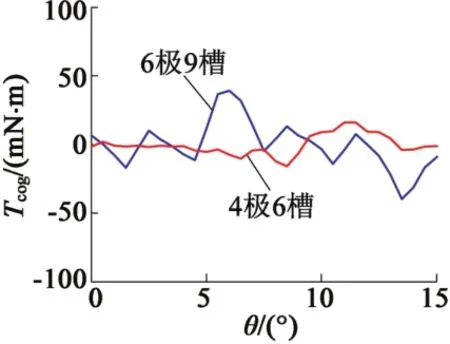
圖8 6極/9槽,4極/6槽電機(jī)齒槽轉(zhuǎn)矩
由圖8可見,6極/9槽,4極/6槽鐵氧體伺服電機(jī)齒槽轉(zhuǎn)矩分別為79 mN·m和36 mN·m。兩電機(jī)q=0.5,但4極鐵氧體伺服電機(jī)的齒槽轉(zhuǎn)矩反而比6極的小了一半,因此,從減小鐵氧體伺服電機(jī)齒槽轉(zhuǎn)矩和簡化轉(zhuǎn)子結(jié)構(gòu)的角度來看,選用4極是合理的。
與分布繞組鐵氧體伺服電機(jī)一樣,相同極數(shù)條件下集中繞組鐵氧體伺服電機(jī)極槽配合的選擇對齒槽轉(zhuǎn)矩影響較大。圖9是4極/6槽與4極/9槽鐵氧體伺服電機(jī)齒槽轉(zhuǎn)矩的仿真結(jié)果。4極/6槽鐵氧體伺服電機(jī)齒槽轉(zhuǎn)矩為36 mN·m,4極/9槽電機(jī)齒槽轉(zhuǎn)矩為28 mN·m。同為4極電機(jī),但q不同,前者為0.5,后者為0.75,q值大的4極/9槽鐵氧體伺服電機(jī)齒槽轉(zhuǎn)矩更小。可見,4極/9槽是鐵氧體伺服電機(jī)比較好的一個極槽配合。

圖9 4極/9槽,4極/6槽電機(jī)齒槽轉(zhuǎn)矩
集中繞組鐵氧體伺服電機(jī)定子繞組可用機(jī)器繞線,因此減小定子槽開口,甚至可以用閉口槽來降低齒槽轉(zhuǎn)矩。圖10是定子開口槽(開口寬度1 mm)和閉口槽時電機(jī)齒槽轉(zhuǎn)矩的仿真結(jié)果,開口槽鐵氧體伺服電機(jī)齒槽轉(zhuǎn)矩為28 mN·m,閉口槽電機(jī)齒槽轉(zhuǎn)矩為9 mN·m,齒槽轉(zhuǎn)矩下降了2/3,效果十分明顯。
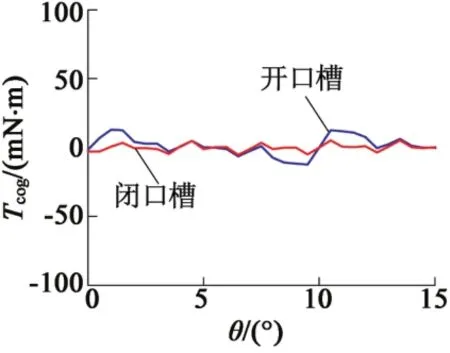
圖10 開口槽和閉口槽電機(jī)的齒槽轉(zhuǎn)矩
對4極/9槽鐵氧體伺服電機(jī)定子開輔助槽如圖11所示,齒槽轉(zhuǎn)矩的仿真結(jié)果如圖12所示。無輔助槽電機(jī)齒槽轉(zhuǎn)矩為9 mN·m,開1個輔助槽的齒槽轉(zhuǎn)矩為16 mN·m,開2個輔助槽的齒槽轉(zhuǎn)矩為24 mN·m,比無輔助槽電機(jī)齒槽轉(zhuǎn)矩有明顯增加。可見,集中繞組鐵氧體伺服電機(jī)定子不適合用開輔助槽的方法來降低齒槽轉(zhuǎn)矩;與此相反,分布繞組鐵氧體伺服電機(jī)定子開輔助槽則可以降低齒槽轉(zhuǎn)矩(仿真分析略)。
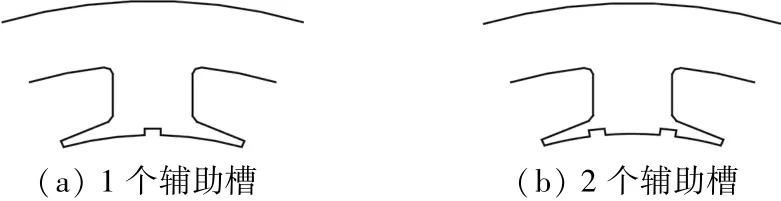
圖11 定子開輔助槽

圖12 定子開輔助槽時的齒槽轉(zhuǎn)矩
3 與釹鐵硼伺服電機(jī)的比較
釹鐵硼伺服電機(jī)定子多用分布繞組,轉(zhuǎn)子為表貼式磁鋼。圖13為1.5 kW,4極/21槽和750 W,4極/9槽釹鐵硼伺服電機(jī)的仿真模型,前者為分布繞組,后者為集中繞組。為了便于比較,釹鐵硼和鐵氧體伺服電機(jī)的規(guī)格數(shù)據(jù)和主要尺寸相同。圖14給出了4極/21槽,4極/9槽釹鐵硼和鐵氧體伺服電機(jī)齒槽轉(zhuǎn)矩的仿真結(jié)果。
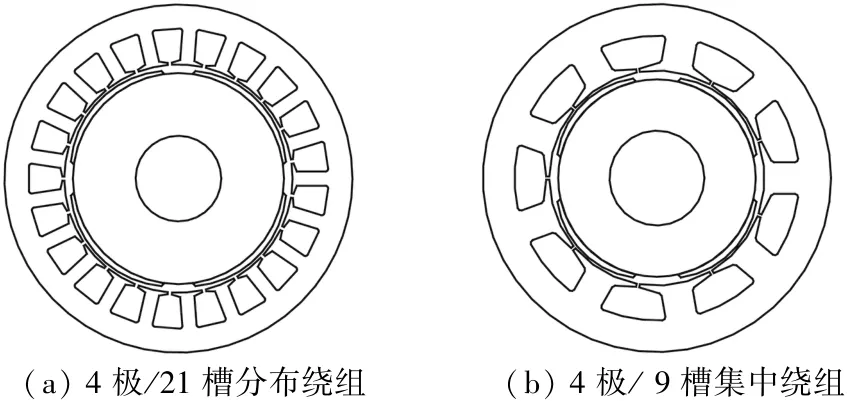
圖13 釹鐵硼伺服電機(jī)仿真模型
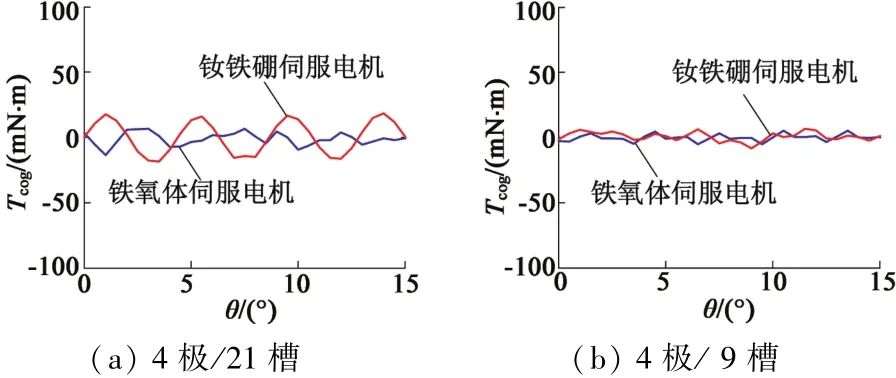
圖14 伺服電機(jī)齒槽轉(zhuǎn)矩仿真結(jié)果
4極/21槽釹鐵硼伺服電機(jī)齒槽轉(zhuǎn)矩為41 mN·m,相同極槽配合鐵氧體伺服電機(jī)齒槽轉(zhuǎn)矩為24 mN·m;4極/9槽釹鐵硼伺服電機(jī)齒槽轉(zhuǎn)矩為16 mN·m,相同極槽配合鐵氧體伺服電機(jī)齒槽轉(zhuǎn)矩為9 mN·m。可見,無論是分布繞組還是集中繞組,鐵氧體伺服電機(jī)的齒槽轉(zhuǎn)矩都要比釹鐵硼伺服電機(jī)的齒槽轉(zhuǎn)矩有所降低。
表1給出了4極/21槽,4極/9槽鐵氧體和釹鐵硼伺服電機(jī)齒槽轉(zhuǎn)矩、氣隙磁場畸變率和電磁轉(zhuǎn)矩脈動率的仿真分析結(jié)果。結(jié)果表明,盡管鐵氧體伺服電機(jī)的齒槽轉(zhuǎn)矩比釹鐵硼伺服電機(jī)的齒槽轉(zhuǎn)矩低,但鐵氧體伺服電機(jī)電磁轉(zhuǎn)矩脈動率比釹鐵硼伺服電機(jī)的略有增加,其原因是釹鐵硼伺服電機(jī)氣隙磁場畸變率不到鐵氧體伺服電機(jī)的一半,反電動勢和電樞電流波形的正弦性更好一些。
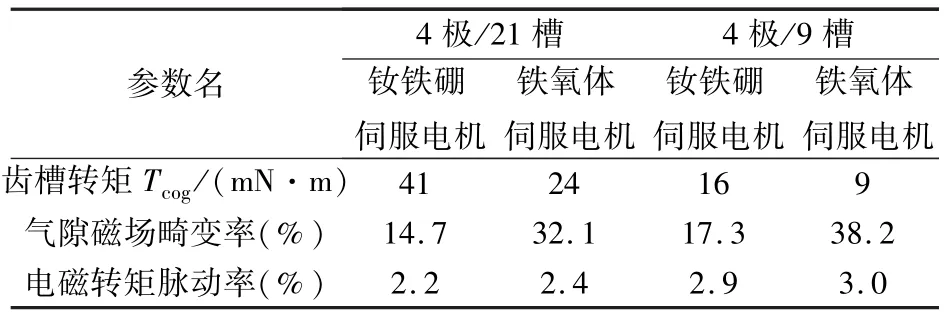
表1 鐵氧體和釹鐵硼伺服電機(jī)仿真結(jié)果比較
為了進(jìn)一步降低鐵氧體伺服電機(jī)的轉(zhuǎn)矩脈動率,可以優(yōu)化電機(jī)的轉(zhuǎn)子多層磁鋼槽布局,提高氣隙磁場的正弦性;同時采用定子斜槽,或轉(zhuǎn)子斜極的辦法來滿足伺服系統(tǒng)的性能要求。
需要說明的是,本文電磁轉(zhuǎn)矩仿真在電機(jī)中通入的是正弦電流,而電機(jī)實(shí)際通入的是含有諧波的非正弦電流,因此,仿真所得的轉(zhuǎn)矩脈動率會比實(shí)際的小。
4 結(jié) 語
仿真結(jié)果及分析表明,選擇合理的極槽配合和轉(zhuǎn)子布局,分布繞組和集中繞組鐵氧體伺服電機(jī)的齒槽轉(zhuǎn)矩都會比表貼式釹鐵硼伺服電機(jī)有所降低;如果進(jìn)一步優(yōu)化轉(zhuǎn)子多層磁鋼槽結(jié)構(gòu),提高電機(jī)氣隙磁場的正弦性,鐵氧體伺服電機(jī)的轉(zhuǎn)矩脈動率可以達(dá)到釹鐵硼伺服電機(jī)的水平。
[1] SIBANDE S E,KAMPER M J,WANG R.Design and performance evaluation of a medium power PM-assisted reluctance synchronous traction machine using bonded PM-sheets[J].SAIEE Africa Research Journal,2006,97(1):14-21.
[2] PELLERINO G,VAGATI A,BOAZZO B,et al.Comparison of induction and PM synchronous motor drives for EV application including design examples[J].IEEE Transactions on Industry Applications,2012,48(6):2322-2332.
[3] 李新華,阮波,等.電動大巴永磁輔助磁阻同步電動機(jī)仿真分析 [J].微特電機(jī),2014,42(3):1-3.
[4] 李新華,黃賢蕾,劉偉,等.異步起動永磁輔助式磁阻同步電動機(jī)研究[J].微特電機(jī),2015,43(6):1-4.
[5] 徐竟成.永磁輔助式磁阻同步伺服電機(jī)及控制研究 [D].武漢:湖北工業(yè)大學(xué),2015.
[6] 李新華,張楊,王曉光,等.永磁輔助磁阻同步電機(jī)伺服控制策略研究[J].微特電機(jī),2016,44(9):4-6.
[7] 李文亮.集中繞組永磁同步伺服電機(jī)設(shè)計研究 [D].南京:東南大學(xué),2013.
[8] 莫會成.分?jǐn)?shù)槽集中繞組永磁交流伺服電動機(jī)齒槽轉(zhuǎn)矩分析[J].微電機(jī),2011,44(8):6-10.
