前端帶小電容整流器的感應(yīng)電機(jī)變頻驅(qū)動(dòng)控制
2017-05-04 07:15:17湖南電氣職業(yè)技術(shù)學(xué)院湘潭411101湖南工程學(xué)院湘潭411101
微特電機(jī) 2017年7期
關(guān)鍵詞:指令
(1.湖南電氣職業(yè)技術(shù)學(xué)院,湘潭411101;2.湖南工程學(xué)院 湘潭411101)
0 引 言
感應(yīng)電機(jī)由于具有技術(shù)成熟、可靠性高、成本低、維護(hù)性好等優(yōu)點(diǎn),在變頻驅(qū)動(dòng)應(yīng)用中得到了廣泛使用[1-3]。而在低成本三相感應(yīng)電機(jī)(以下簡(jiǎn)稱IM)變頻驅(qū)動(dòng)應(yīng)用中,例如空調(diào)系統(tǒng)和小功率變頻器,通常采用二極管整流器作為前端直流源,因?yàn)椴豢卣髌鞒杀据^低,可靠性高[4-6]。如圖1所示,在這類傳動(dòng)系統(tǒng)中,直流側(cè)通常使用較大電解電容器來平衡瞬時(shí)輸入和輸出功率差異,以及抑制電壓尖峰[7-8]。但直流側(cè)電解電容的使用將會(huì)顯著增加系統(tǒng)體積重量,同時(shí)由于電容自身可靠性不高,加上其寄生電感可能導(dǎo)致的電壓尖峰,將導(dǎo)致系統(tǒng)可靠性進(jìn)一步降低。
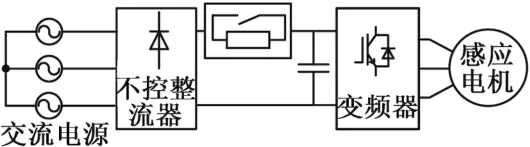
圖1 前端帶二極管整流橋的感應(yīng)電機(jī)驅(qū)動(dòng)系統(tǒng)
為了提高系統(tǒng)可靠性,越來越多的文獻(xiàn)報(bào)道了對(duì)電解電容器運(yùn)行監(jiān)控的研究[9-11]。其中離線監(jiān)測(cè)技術(shù)由于需要額外的測(cè)量和電容模型的相關(guān)參數(shù),導(dǎo)致了監(jiān)測(cè)的復(fù)雜度,因此不利于工程實(shí)踐[12]。而文獻(xiàn)[13]提出的實(shí)時(shí)在線監(jiān)測(cè)技術(shù)不能應(yīng)用到如圖1所示的主電路拓?fù)浣Y(jié)構(gòu)中。另一方面,也有越來越多的文獻(xiàn)開展了對(duì)變頻器控制技術(shù)的研究,以期盡量減少直流母線電容的容值,但這些研究絕大部分是基于前端為三相可控整流供電或單相整流橋供電的變頻器,不適用于圖1的系統(tǒng)[14-17]。而且這些研究方案都采用了傳統(tǒng)的閉環(huán)電流解耦控制來調(diào)節(jié)電機(jī)的轉(zhuǎn)矩和磁鏈,若直流電容進(jìn)一步減小將仍然導(dǎo)致變頻器輸出功率波動(dòng)。因此文獻(xiàn)[18]加強(qiáng)了電流控制的復(fù)雜度來應(yīng)對(duì),綜合應(yīng)用了弱磁控制、抗飽和控制和過調(diào)制控制等方法,但這將導(dǎo)致控制器動(dòng)態(tài)性能的減弱。
本文在前述文獻(xiàn)研究基礎(chǔ)上,設(shè)計(jì)了一種帶小電容不控整流器供電IM變頻驅(qū)動(dòng)系統(tǒng)的新型復(fù)合控制方案。控制方案在磁場(chǎng)定向電機(jī)模型控制模式(以下簡(jiǎn)稱FOMMC)的基礎(chǔ)上實(shí)現(xiàn)了與六角形電壓矢量邊界控制模式(以下簡(jiǎn)稱HVVMC)的結(jié)合和靈活切換,同時(shí)綜合運(yùn)用了轉(zhuǎn)速估計(jì)算法,故也是一種無速度傳感器方案。其中在FOMMC控制模式下,控制器根據(jù)轉(zhuǎn)矩指令和轉(zhuǎn)子磁鏈指令生成輸出電壓參考,而在直流電壓較低時(shí),則采用HVVMC模式以實(shí)現(xiàn)最大電壓利用率。最后通過1.5 kW的IM驅(qū)動(dòng)控制平臺(tái),結(jié)合使用20 μF薄膜電容器對(duì)控制策略的有效性進(jìn)行了試驗(yàn)驗(yàn)證。
1 新型IM驅(qū)動(dòng)控制器設(shè)計(jì)
1.1 IM動(dòng)態(tài)數(shù)學(xué)模型
IM的定子電壓和磁鏈動(dòng)態(tài)方程可以表示為如下的矢量形式[19]:
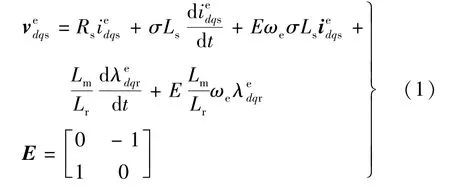

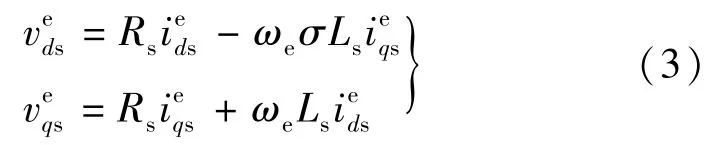
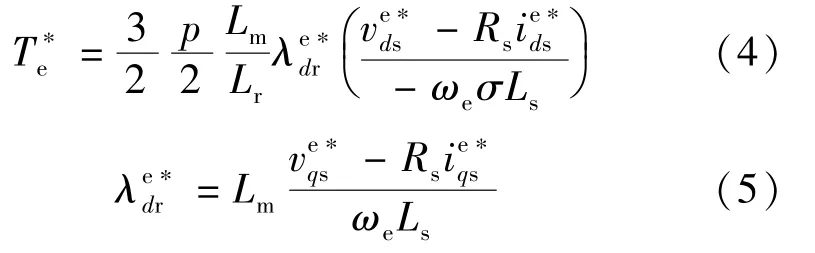
式中:p為極對(duì)數(shù),式(1)中定子電壓方程可寫成:
1.2 新型控制器模式切換結(jié)構(gòu)
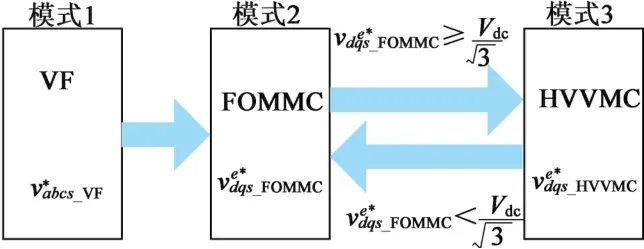
圖2 新型控制器模式切換結(jié)構(gòu)
1.3 新型控制器原理分析
圖3為d-q旋轉(zhuǎn)坐標(biāo)系下式(4)和式(5)的圖形化描述,圖中還繪出了電壓矢量六邊形邊界,其中垂直于d軸的實(shí)線為電磁轉(zhuǎn)矩指令,平行于d軸的虛線為轉(zhuǎn)子磁鏈指令。當(dāng)電壓參考在電壓矢量六邊形邊界以內(nèi)時(shí),根據(jù)模式切換原理,將工作在FOMMC模式,基于單機(jī)模型可得輸出定子電壓指令:
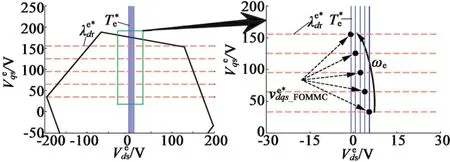
圖3 FOMMC模式下的電壓矢量選擇

從圖3中還可以看出,直流電壓下降將導(dǎo)致電壓矢量六邊形邊界縮小,或轉(zhuǎn)速持續(xù)上升都可能使旦超過邊界,控制器將轉(zhuǎn)為HVVMC模式。在HVVMC模式下,控制器將根據(jù)最大直流電壓盡可能生成所需要的電磁轉(zhuǎn)矩,同時(shí)調(diào)節(jié)磁鏈?zhǔn)沟迷陔姍C(jī)工作在弱磁區(qū)域。在實(shí)際IM驅(qū)動(dòng)中,FOMMC模式一般在轉(zhuǎn)速較低時(shí)應(yīng)用,而HVVMC模式一般在轉(zhuǎn)速較高時(shí)使用,基于此,假設(shè)HVVMC模式下的定子電阻壓降可以忽略,該假設(shè)將不影響電機(jī)的控制性能。故在HVVMC模式下的定子電壓方程可以簡(jiǎn)化:
結(jié)合式(2)的第一式和式(7),可以得到轉(zhuǎn)矩指令和d,q軸電壓之間的關(guān)系:

其中轉(zhuǎn)矩指令的軌跡在d-q軸電壓平面將構(gòu)成雙曲線。在圖4中,轉(zhuǎn)矩曲線與旋轉(zhuǎn)電壓矢量六邊形之間的交點(diǎn)即為在HVVMC模式下的輸出電壓矢量,而矢量六邊形的邊界取決于直流母線電壓的大小。每個(gè)旋轉(zhuǎn)電壓矢量六邊形的邊界具體可以描述為如下形式[18]:

式中:Mn和Bn是由每個(gè)給定六邊形邊界所確定的常量。
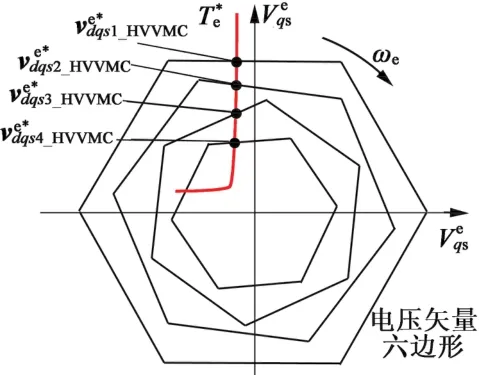
圖4 HVVMC模式下的電壓矢量選擇
在圖4中還可以看出,式(9)對(duì)應(yīng)的六邊形邊界和電磁轉(zhuǎn)矩曲線有兩個(gè)交點(diǎn),也就是說在HVVMC模式下可提供兩個(gè)定子電壓指產(chǎn)生所需的轉(zhuǎn)矩,具體如圖5所示。但是,考慮到vHVVMC是唯一能滿足所需定子磁鏈的電壓矢量,所以選擇其作為真正的輸出,具體的表達(dá)式如下:
式(10)所描述的算法可以在直流母線電壓波動(dòng)時(shí)迅速對(duì)電壓矢量求解以獲取需要的電磁轉(zhuǎn)矩。
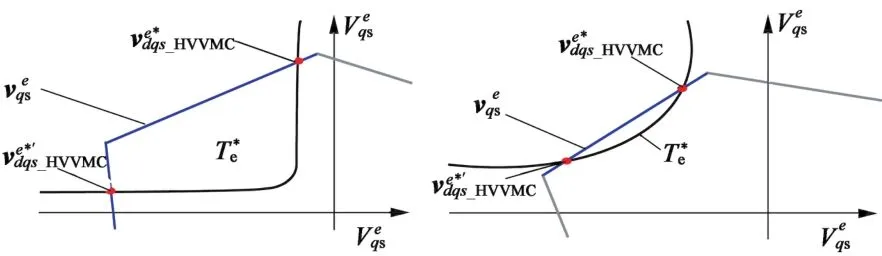
圖5 電壓矢量可行解選擇
進(jìn)一步可以對(duì)HVVMC算法下如何使得電機(jī)運(yùn)行在弱磁工作區(qū)進(jìn)行分析。如圖5所示,一個(gè)給定的轉(zhuǎn)矩指令軌跡將和旋轉(zhuǎn)電壓矢量六邊形進(jìn)行交叉,交叉點(diǎn)即電壓指令,當(dāng)直流電壓下降時(shí),交叉點(diǎn)也隨著q軸向下移,有較低的q軸電壓分量。從式(7)可以看到,較低q軸電壓分量意味著降低d軸電流,從而將減小在給定轉(zhuǎn)子速度下的磁鏈。這也意味著自動(dòng)弱磁和最大電壓利用率可以同時(shí)實(shí)現(xiàn),而不需要增加一個(gè)額外的控制。
此外,FOMMC模式和HVVMC模式之間的快速平滑切換是可行的,也不需要額外的控制,因?yàn)殡姍C(jī)FOMMC模式下電磁轉(zhuǎn)矩控制中不包含積分項(xiàng),這是和傳統(tǒng)轉(zhuǎn)矩電流閉環(huán)控制是不同的。模式的平滑切換將對(duì)變頻器使用小電容非常有利,因?yàn)榭梢詰?yīng)對(duì)頻繁的直流電壓波動(dòng)。
1.4 參數(shù)擾動(dòng)補(bǔ)償
考慮到磁飽和和測(cè)量計(jì)算誤差將導(dǎo)致式(6)的第一式、第二式,式(10)的第一式、第二式中的電機(jī)參數(shù)發(fā)生擾動(dòng),進(jìn)而使轉(zhuǎn)子磁鏈在FOMMC和HVVMC模式下波動(dòng),同時(shí)上述這些公式計(jì)算得到電壓若存在偏差,則進(jìn)一步導(dǎo)致不正確的定子電流,從而加大電機(jī)運(yùn)行損耗。圖6為測(cè)量得到的當(dāng)電機(jī)參數(shù)Ls,Rs和σLs存在偏差時(shí)定子電流的變化曲線,測(cè)量時(shí)的轉(zhuǎn)速保持在60%額定速度和70%額定轉(zhuǎn)矩,具體試驗(yàn)用的電機(jī)主要參數(shù)如表1所示。
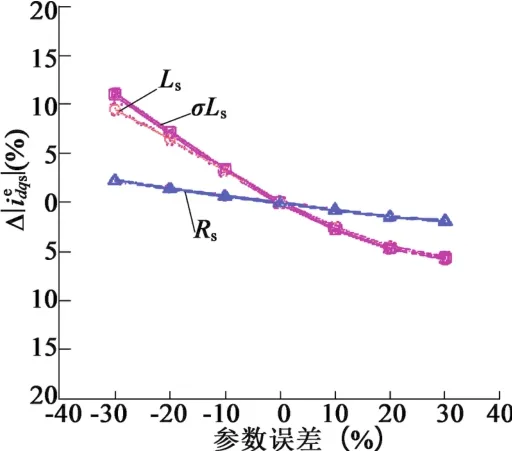
圖6 電機(jī)參數(shù)擾動(dòng)導(dǎo)致的電流偏差
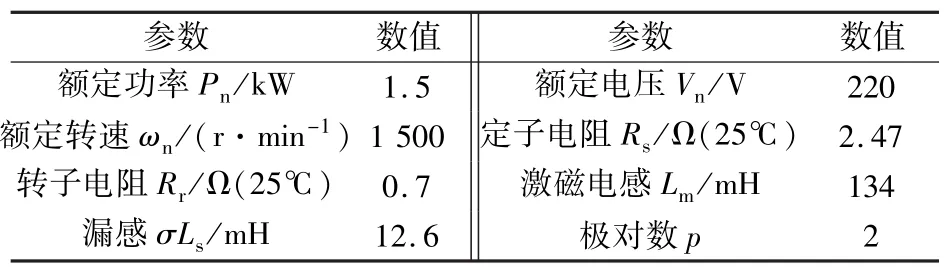
表1 試驗(yàn)用IM主要參數(shù)
考慮到工程實(shí)踐中采用對(duì)電機(jī)參數(shù)擾動(dòng)的在線補(bǔ)償是實(shí)現(xiàn)較好電機(jī)控制性能的有效方案,因此本文采用了一種電壓擾動(dòng)狀態(tài)濾波器設(shè)計(jì)。圖7為狀態(tài)濾波器的控制框圖。從圖7中可看出采用了一個(gè)PI型龍伯格電流觀測(cè)器來估計(jì)參數(shù)變化導(dǎo)致的電壓擾動(dòng)。因?yàn)殡妷褐噶顅前饋給電壓擾動(dòng)觀測(cè)器,所以可在其輸出得到電壓擾動(dòng)值Δqs_D。由于 HVVMC模式下電壓指令位于電壓矢量六邊形邊界上,所以定子電流含有6倍頻諧波,因此引入了諧振濾波器。
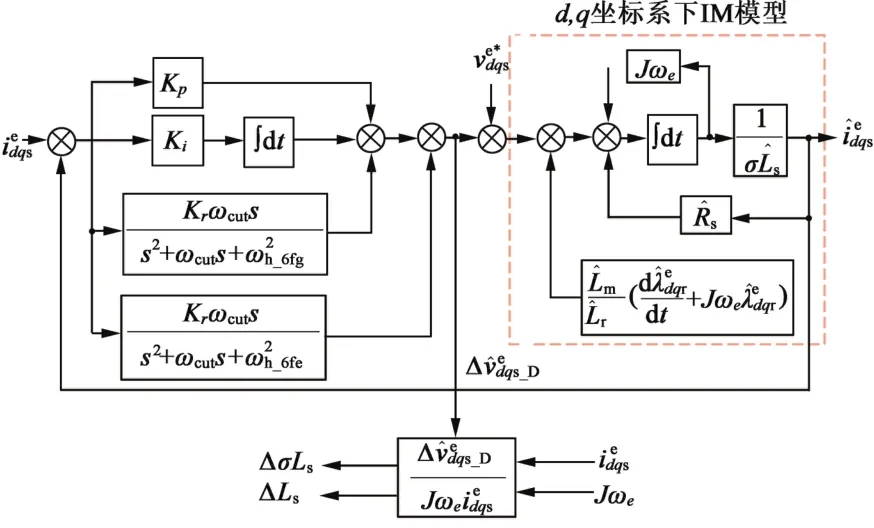
圖7 狀態(tài)濾波器設(shè)計(jì)
通過對(duì)圖7中的狀態(tài)濾波器結(jié)構(gòu)推導(dǎo)可以得到s域下的方程如下:
式中:Kp和Ki為PI調(diào)節(jié)器的比例和積分參數(shù),Kr為諧振增益;而ωh_6fg,ωh_6fe和ωcut分別為6倍頻電網(wǎng)頻率、6倍頻同步頻率和截止頻率;上標(biāo)“^”代表了變量的估計(jì)值。將式(12)代入式(11)可以得到:
根據(jù)終值定律,穩(wěn)態(tài)時(shí)即s→0,進(jìn)而d,q軸電壓擾動(dòng)可以通過將式(1)代入式(13)得到:
式中:ΔRs=-Rs;ΔσLs=-σLs。 基于轉(zhuǎn)子磁場(chǎng)定向原理,式(14)可簡(jiǎn)化:

式中:ΔLs=-Ls。從式(15)可以看出,將定子電阻導(dǎo)致的壓降忽略,則有:

圖8為在60%額定速度和70%額定轉(zhuǎn)矩時(shí)對(duì)參數(shù)擾動(dòng)的補(bǔ)償仿真結(jié)果。圖中ΔLs被模擬具有+15%的偏差,在t=1 s后進(jìn)行了參數(shù)補(bǔ)償,約1 s后轉(zhuǎn)子磁鏈偏差修正降低至零。仿真結(jié)果顯示通過參數(shù)擾動(dòng)補(bǔ)償,可以在參數(shù)不匹配的情況下也可得到定子電流和轉(zhuǎn)子磁鏈的精確控制。
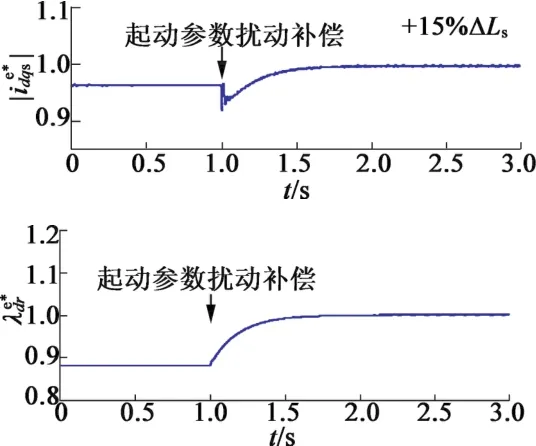
圖8 參數(shù)擾動(dòng)補(bǔ)償仿真結(jié)果
1.5 新型驅(qū)動(dòng)控制器框圖
圖9為新型IM驅(qū)動(dòng)控制的整體框圖,它采用了文獻(xiàn)[21]中所涉及的轉(zhuǎn)子位置觀測(cè)器,故也是一種無速度傳感器控制方案。從框圖中可以看出,變頻器的參考電壓矢量有3個(gè)輸入途徑,首先是電機(jī)起動(dòng)過程采用的VF模塊可以輸出參考電壓,但起動(dòng)結(jié)束后則將其屏蔽;然后是FOMMC模塊開始運(yùn)行,接收到轉(zhuǎn)速PI外環(huán)的輸出后通過運(yùn)算得到電壓參考;當(dāng)直流電壓降低導(dǎo)致FOMMC模塊生成的電壓參考超過限制值時(shí),則自動(dòng)切換到HVVMC模塊,該模塊在轉(zhuǎn)速PI外環(huán)輸出的轉(zhuǎn)矩指令基礎(chǔ)上綜合使用狀態(tài)濾波器實(shí)現(xiàn)參考電壓的輸出。得到參考電壓指令后,PWM模塊將生成控制脈沖實(shí)現(xiàn)電機(jī)驅(qū)動(dòng)控制執(zhí)行。
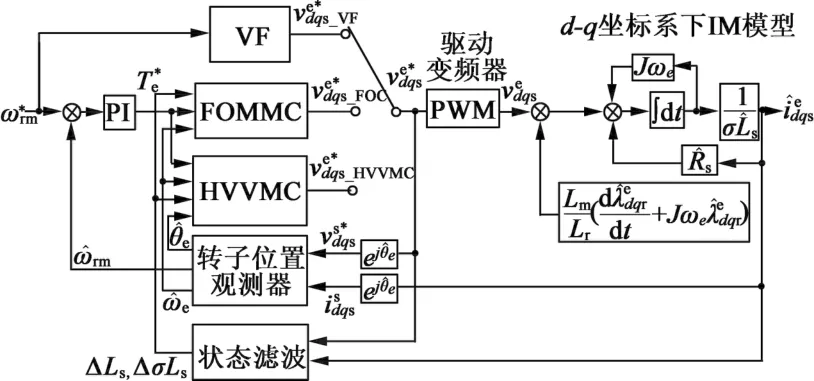
圖9 新型控制策略整體框圖
2 試驗(yàn)驗(yàn)證
用1.5 kW感應(yīng)電機(jī)和帶20 μF薄膜電容的不控整流橋搭建了試驗(yàn)系統(tǒng)以驗(yàn)證前述控制策略的有效性,其中采用了一個(gè)與感應(yīng)電機(jī)功率相同的直流電機(jī)對(duì)負(fù)載進(jìn)行模擬,核心控制算法采用TI公司的28335芯片實(shí)現(xiàn),變頻器主電路采用三菱公司的IPM模塊構(gòu)建,IM的參數(shù)如表1所示,其他主要試驗(yàn)系統(tǒng)參數(shù)如表2所示。
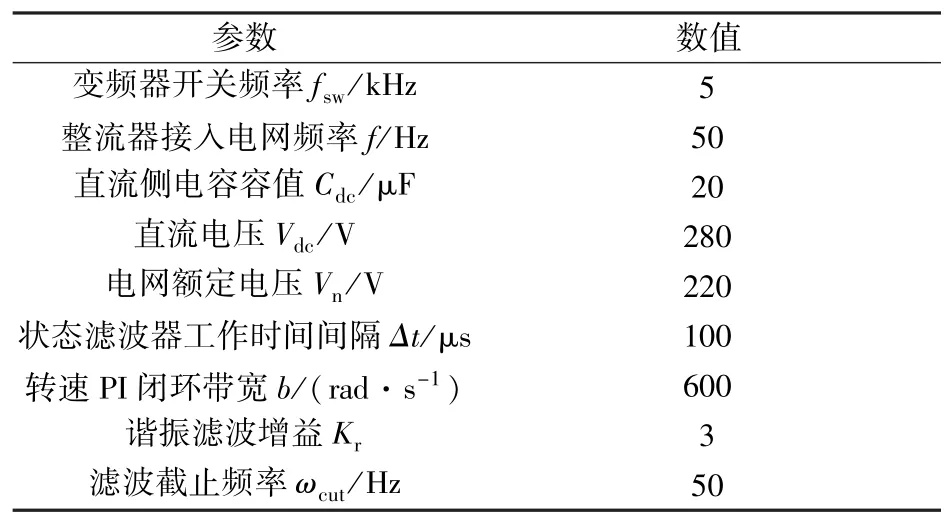
表1 試驗(yàn)系統(tǒng)主要參數(shù)
圖10為新型控制策略作用下電機(jī)在額定轉(zhuǎn)矩時(shí)的穩(wěn)態(tài)運(yùn)行試驗(yàn)波形,此時(shí)轉(zhuǎn)速為額定值的90%。從圖10(a)中可以看出,由于直流側(cè)電容容值降低,直流電壓出現(xiàn)了6倍頻電網(wǎng)頻率的波動(dòng);而圖10(b)所示,控制模式在FOMMC和HVVMC之間實(shí)現(xiàn)了平滑快速地切換,其中高電平為HVVMC模式,其出現(xiàn)的時(shí)間對(duì)應(yīng)圖10(a)中直流電壓的低位;從圖10(c)和圖10(d)所示的電磁轉(zhuǎn)矩和轉(zhuǎn)子磁鏈波形可以看出,雖然存在控制模式切換,但輸出電磁轉(zhuǎn)矩平穩(wěn),磁鏈也波動(dòng)較小;而從圖10(e)的電壓指令d-q坐標(biāo)系圖可以看出,電壓指令的軌跡接近于最大六邊形邊界,因而實(shí)現(xiàn)了在直流電壓下降時(shí)的最大電壓利用。
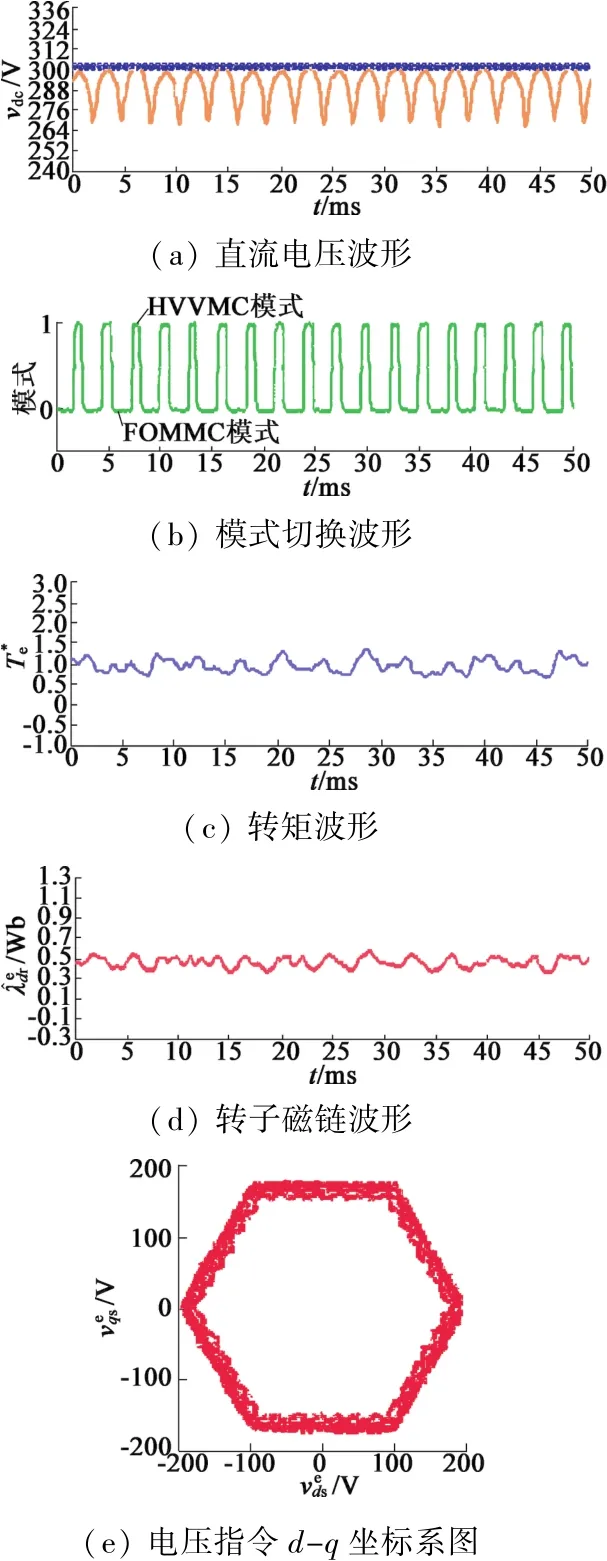
圖10 新型IM驅(qū)動(dòng)控制器試驗(yàn)結(jié)果圖
圖11為電機(jī)在額定轉(zhuǎn)速下負(fù)載轉(zhuǎn)矩變化時(shí)的試驗(yàn)波形。從圖11(a)中可以看出,由于模式切換是平滑而迅速的,故盡管負(fù)載轉(zhuǎn)矩發(fā)生多次突變,轉(zhuǎn)速仍較穩(wěn)定地保持在1 500 r/min;而圖11(b)中可以從轉(zhuǎn)矩電流的變化看出轉(zhuǎn)矩的變化,其中包含了從25%額定轉(zhuǎn)矩到50%額定轉(zhuǎn)矩,再到100%額定轉(zhuǎn)矩的過程。試驗(yàn)結(jié)果說明在全負(fù)載范圍內(nèi)控制器都可以實(shí)現(xiàn)較好的控制性能,因而系統(tǒng)可靠性和生命周期的提高是不以犧牲控制性能為代價(jià)的。
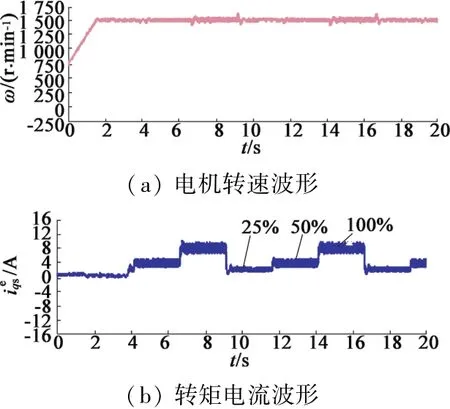
圖11 負(fù)載轉(zhuǎn)矩變化時(shí)的試驗(yàn)結(jié)果
3 結(jié) 語(yǔ)
為了降低前端由不控整流器供電的IM變頻驅(qū)動(dòng)系統(tǒng)中直流側(cè)電容的容值,本文設(shè)計(jì)了新型復(fù)合模式切換型控制器,其結(jié)合了FOMMC模式控制和
HVVMC模式控制,并實(shí)現(xiàn)了平滑切換,同時(shí)設(shè)計(jì)了參數(shù)擾動(dòng)補(bǔ)償狀態(tài)濾波器,最后經(jīng)過試驗(yàn)研究,可總結(jié)如下結(jié)論:(1)新型驅(qū)動(dòng)控制策略在直流電壓波動(dòng)時(shí)能實(shí)現(xiàn)平滑地在FOMMC模式和HVVMC模式之間切換,保證了最大直流電壓利用率。(2)控制器中增加的狀態(tài)濾波器能夠較好地解決電機(jī)參數(shù)擾動(dòng)問題,試驗(yàn)結(jié)果顯示在新型控制策略作用下,直流側(cè)容值減小,而變頻器的可靠性提高,同時(shí)還保持了較好的電機(jī)控制性能。
[1] 張興華,孫振興,王德明.電動(dòng)汽車用感應(yīng)電機(jī)直接轉(zhuǎn)矩控制系統(tǒng)的效率最優(yōu)控制[J].電工技術(shù)學(xué)報(bào),2013,28(4):255-260.
[2] 梅從立,黃文濤,殷開婷,等.基于Hammerstein模型的感應(yīng)電機(jī)變頻器調(diào)速系統(tǒng)神經(jīng)網(wǎng)絡(luò)控制[J].控制與決策,2015,30(6):1148-1152.
[3] 趙海森,王博,王義龍,等.勢(shì)能負(fù)載條件下感應(yīng)電機(jī)變頻-調(diào)壓分段節(jié)能控制策略研究[J].中國(guó)電機(jī)工程學(xué)報(bào),2015,35(6):1490-1497.
[4] 姜衛(wèi)東,李王敏,佘陽(yáng)陽(yáng),等.四象限電機(jī)控制器直流側(cè)PWM整流器變系數(shù)控制策略[J].微特電機(jī),2014,42(2):63-66.
[5] 胡楊,褚齊超,佘陽(yáng)陽(yáng),等.以單相PWM整流器為前端的永磁同步電動(dòng)機(jī)背靠背驅(qū)動(dòng)系統(tǒng)[J].微特電機(jī),2014,42(6):35-39.
[6] 張鋼,柴建云.一種電機(jī)驅(qū)動(dòng)用大功率網(wǎng)側(cè)變流系統(tǒng)研究[J].電力電子技術(shù),2014,46(1):93-95.
[7] LEE W F,KIM M,YOON J,et al.Condition monitoring of DC-link electrolytic capacitors in adjustable-speed drives[J].IEEE Transactions on Industry Applications,2008,44(5):1606-1613.
[8] GADPERI M L.Life prediction modeling of bus capacitors in AC variable frequency drives[J].IEEE Transactions on Industry Applications,2005,41(6):1430-1435.
[9] 潘志文,崔桂梅.電力電容器的電容值測(cè)量及失效分析[J].物理測(cè)試,2011,29(6):59-62.
[10] 李享,李岱霖,葉雪榮,等.LED開關(guān)電源中鋁電解電容性能退化模型的研究[J].電源學(xué)報(bào),2012,10(6):51-64.
[11] LAYHANI A,VENET P,GRELLETt G,et al.Failure prediction of electrolytic capacitors during operation of a switchmode power supply[J].IEEE Transactions on Power Electronics,1998,13(6):1199-1207.
[12] IMAM A M,HABETLER T G,HARLEY R G,et al.Real-time condition monitoring of the electrolytic capacitors for power electronics applications[C]//IEEE International Conference on Applied Power Electronics.IEEE,2007:1057-1061.
[13] LEE D C,LEE K J,SEOK J K,et al.Online capacitance estimation of DC-link electrolytic capacitors for three-phase AC/DC/AC PWM converters using recursive least squares method[J].IEE Proceedings-Electric Power Applications,2005,152(6):1503-1508.
[14] INAZUMA K,URSUGI H,OHISHI K,et al.High-power-factor Single-phase Diode Rectifier Driven by Repetitively Controlled IPM Motor[J].IEEE Transactions on Industry Electronics,2013,60(10):4427-4437.
[15] LEE W J,SON Y,HA J I.Single-phase active power filtering method using diode-rectifier-fed motor drive[C]//IEEE Energy Conversion Congress and Exposition.IEEE,2013:2461-2465.
[16] 邱濤,陳林康.變頻器中PWM整流器的設(shè)計(jì)及仿真[J].微特電機(jī),2006,34(5):17-19.
[17] 尹璐,趙爭(zhēng)鳴,魯挺,等.基于雙DSP的雙PWM變頻器控制平臺(tái)設(shè)計(jì)[J].電力自動(dòng)化設(shè)備,2013,33(11):148-153.
[18] CHOI C H,SEOK J K,LORENZ R D.Wide-speed direct torque and flux control for interior PM synchronous motors operating at voltage and current limits[J].IEEE Transactions on Industry Applications,2013,49(1):109-117.
[19] 劉新正,蘇少平,高琳.電機(jī)學(xué)[M].北京:電子工業(yè)出版社,2014.
[20] 周志剛.一種感應(yīng)電機(jī)的解耦控制方法[J].中國(guó)電機(jī)工程學(xué)報(bào),2003,23(2):121-125.
[21] 史婷娜,肖竹欣,肖有文,等.基于改進(jìn)型滑模觀測(cè)器的無刷直流電機(jī)無位置傳感器控制[J].中國(guó)電機(jī)工程學(xué)報(bào),2015,35(8):2043-2051.
猜你喜歡
科普童話·神秘大偵探(2023年1期)2023-05-30 12:48:10
測(cè)控技術(shù)(2018年5期)2018-12-09 09:04:26
電子測(cè)試(2018年18期)2018-11-14 02:30:34
電信科學(xué)(2016年10期)2016-11-23 05:11:56
時(shí)代農(nóng)機(jī)(2015年3期)2015-11-14 01:14:29
科技傳播(2015年20期)2015-03-25 08:20:30
信息安全研究(2015年3期)2015-02-28 20:18:12
西安航空學(xué)院學(xué)報(bào)(2014年5期)2014-07-13 01:27:52
家電科技(2014年5期)2014-04-16 03:11:28
汽車零部件(2014年2期)2014-03-11 17:46:27
