基于滑模觀測器的電動汽車用感應電機驅(qū)動控制
2017-05-04 07:15:20馬文華劉欣彤劉海波王建強
微特電機 2017年7期
馬文華,劉欣彤,劉海波,王建強
(河北水利電力學院,滄州061001)
0 引 言
純電動汽車(以下簡稱EV)是僅由電能進行驅(qū)動的,而電能一般存儲在電池、超級電容器等設(shè)備中[1-6]。在EV中,電動機將電能轉(zhuǎn)換成機械能以實現(xiàn)電力傳動,由于EV中的電力傳動系統(tǒng)需考慮不同路況差異和其他一些限制,存在和其他電力傳動系統(tǒng)不同的特殊設(shè)計要求,如低速時高轉(zhuǎn)矩輸出、較寬速度范圍內(nèi)的高效率運行等[7-10]。通常,基于高性能感應電機(以下簡稱IM)的傳動系統(tǒng)是一個中低成本EV的最佳選擇[11-13]。
針對傳統(tǒng)基于磁場定向的IM驅(qū)動控制器存在的一些諸如暫態(tài)響應慢和效率不高等問題,文獻[14]提出了一種基于模糊神經(jīng)網(wǎng)絡(luò)的新型IM驅(qū)動控制策略;文獻[15]設(shè)計了一種結(jié)合模糊神經(jīng)網(wǎng)絡(luò)觀測器和滑模控制器的IM驅(qū)動系統(tǒng),較傳統(tǒng)控制器的魯棒性得到了較大的提高;文獻[16]提出了一種結(jié)合人工智能的IM直接轉(zhuǎn)矩控制器,以提高系統(tǒng)響應。但上述文獻的研究中,存在過擬合和計算量較大的問題,不利于實際工程。另一方面,無速度傳感器IM驅(qū)動控制能消除速度傳感器,降低了成本和系統(tǒng)復雜度,得到了廣泛研究[17-18]。在無速度傳感器IM驅(qū)動系統(tǒng)中,通常使用速度觀測器進行速度估計,文獻[19]和[20]中使用了一種基于模型參考自適應的速度觀測器,但都假定已經(jīng)轉(zhuǎn)子磁鏈或負載轉(zhuǎn)矩,此外,在低速時,估計轉(zhuǎn)速和實際轉(zhuǎn)速差別較大。
本文基于前述文獻研究,提出了一種用于電動汽車的基于滑模觀測器的IM無速度傳感器驅(qū)動控制策略,控制器結(jié)合使用了間接矢量控制與固定邊界層滑模觀測器(以下簡稱 FBLSMO),其中FBLSMO負責估計轉(zhuǎn)速和轉(zhuǎn)子磁通,即使在未知負載轉(zhuǎn)矩的條件下,依然能工作,且在低速工況下較傳統(tǒng)速度觀測器精度更高。同時使用了間接矢量控制以及前饋補償,從而計算簡單,并有較好的暫態(tài)性能。最后搭建了IM驅(qū)動試驗平臺開展了相關(guān)試驗,對新型控制策略的有效性進行了驗證。
1 電動汽車電力傳動系統(tǒng)結(jié)構(gòu)
圖1為典型的EV中的電力傳動系統(tǒng)的結(jié)構(gòu)示意圖。從圖中可以看出,系統(tǒng)中包括了電池組(包括充電器)、DC/DC直流變換器、IM和變頻器,其中變頻器的輸入為直流,輸出交流直接到IM,而箭頭代表了能量流動的方向。系統(tǒng)中的電池由充電器充電,變頻器則將電池中電能根據(jù)需要變換給電動機,以控制車輛的速度和運動方向。可以注意到,在制動過程中,電池可以被反向充電,從而提高了系統(tǒng)效率。DC/DC直流變換器是可選組件,當電池組電壓和變頻器輸出電壓匹配時,該變換器可以取消。電機不直接驅(qū)動車輪,存在機械傳動結(jié)構(gòu),但考慮到與本文研究內(nèi)容無關(guān),故只將其當成電機的負載。
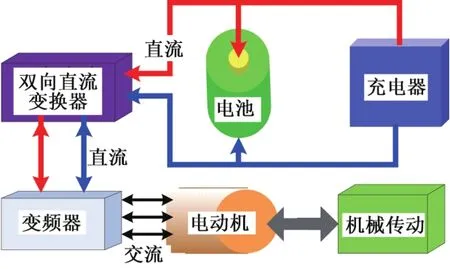
圖1 典型EV電力傳動系統(tǒng)結(jié)構(gòu)
2 感應電機模型
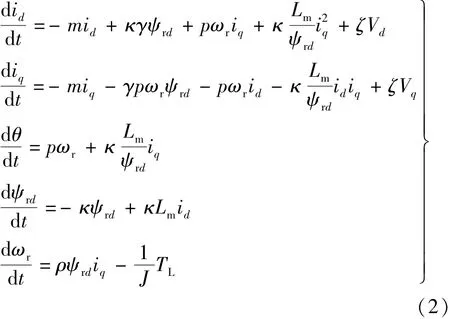
在d-q旋轉(zhuǎn)坐標系下的IM數(shù)學模型[12]:
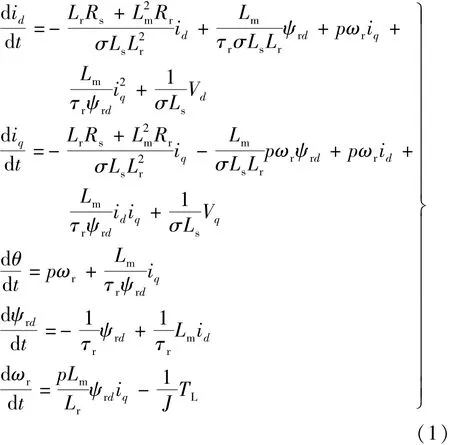
式中:id和iq,Vd和Vq分別為d,q軸定子電流和電壓;p,ωr,Lm,TL,J,ψrd和 θ分別為極對數(shù)、轉(zhuǎn)速、激磁電感、負載轉(zhuǎn)矩、轉(zhuǎn)動慣量、d軸轉(zhuǎn)子磁鏈和磁鏈角;Ls和Lr為定子和轉(zhuǎn)子電感;Rs和Rr為定子和轉(zhuǎn)子電阻;其他相關(guān)參數(shù):轉(zhuǎn)子時間常數(shù)τr=Lr/Rr,漏磁系數(shù) σ=1-L/LsLr。 為了簡化,令 m=(LrRs+LRr)/σLsL,γ=Lm/σLsLr,ζ=1/σLs,κ=1/τr和 ρ=pLm/Lr,進而式(1)可重寫:
3 固定邊界層滑模觀測器設(shè)計
新型控制器僅對電機的三相定子電流進行了測量,測量得到三相定子電流ia,ib和ic后,進行d-q旋轉(zhuǎn)坐標變換,得到d軸和q軸定子電流分量id和:
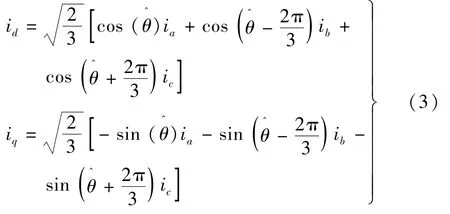
式中:為估計的磁鏈角,從式(2)中得到的 和轉(zhuǎn)子轉(zhuǎn)速的關(guān)系:
假設(shè)式(2)描述的系統(tǒng)有輸出[y1,y2]T=[id,iq]T,可以注意到系統(tǒng)中ψrd是不可觀的。根據(jù)文獻[21],當y1=id且 κ>0時,式(2)中 ψrd具有穩(wěn)定的零動態(tài),因此可以設(shè)計FBLSMO估計ψrd,進而得到ωr。其中觀測器所需的d,q軸電壓是從輸出電壓前饋補償?shù)玫降?這將在下一節(jié)進行敘述,具體的FBLSMO描述如下:

系數(shù)B1,B2和B3具體如下:
式中:ε為一個小值,代表了限定范圍。接下來,對滑模觀測器的指數(shù)收斂性進行證明。假設(shè)ψrd的觀測誤差為 e1=ψrd-,且超過了ε,則B1=0,并有de1/dt=-κe1(κ>0)。設(shè)計李亞普洛夫函數(shù)為Ve1=1/2e,求導有 dVe1/dt=-κe<-κε2<0。 因此證明了是指數(shù)收斂到ψrd的。因此,對于一個足夠小的ε>0,總是可以找到時刻 t1,當t>t1,滿足e1≤ε,此時B1=1。 然后定義e2=id-,當t>t1時,能導出如下方程:
為了證明是收斂到id的,設(shè)計李亞普洛夫函數(shù)為Ve2=1/2e。設(shè)置λ1:

對李亞普洛夫函數(shù)求導可以得到:
因此,將在有限時間t2內(nèi)收斂到id,當t>t2,有B2=1和de2/dt=e2=0,根據(jù)式(10),可以得到新的方程:


轉(zhuǎn)子磁鏈收斂將導致E和dE/dt指數(shù)收斂至


式中:ξ3>0,進一步可以得到以下方程:


4 間接矢量控制器設(shè)計
圖2為新型控制系統(tǒng)的框圖。從圖中可以看出,系統(tǒng)有兩種控制模式,可工作在轉(zhuǎn)速或轉(zhuǎn)矩控制模式。在轉(zhuǎn)速控制模式時,轉(zhuǎn)矩前饋內(nèi)嵌到電機電磁轉(zhuǎn)矩的計算中,其中T*和ΔT分別代表了前饋輸出和轉(zhuǎn)矩補償。在轉(zhuǎn)矩控制模式,控制器的轉(zhuǎn)矩參考為Tref,最終的轉(zhuǎn)矩指令為Tcmd。圖中虛線框內(nèi)為間接矢量控制計算過程,計算后輸出q軸電流參考iqref,而d軸電流參考idref是由磁鏈PI計算輸出的,而iqref和idref將送入電流環(huán)PI調(diào)節(jié)器,電流環(huán)計算結(jié)果加上電壓前饋得到參考電壓Vd和Vq,經(jīng)過反旋轉(zhuǎn)坐標變換后經(jīng)由空間矢量脈寬調(diào)制(以下簡稱SVPWM)模塊用于生成最后的PWM脈沖。其中FBLSMO的輸入為Vd和Vq,以及測量得到的id和iq,輸出,和。
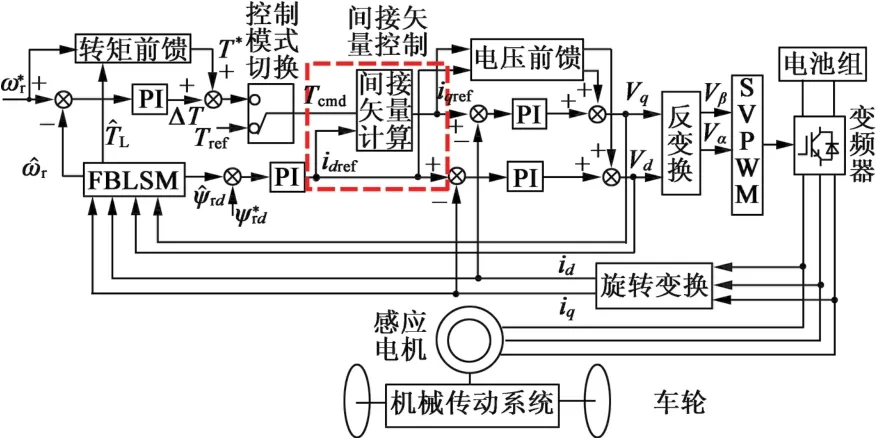
圖2 新型控制系統(tǒng)框圖
4.1 間接矢量控制
IM的動態(tài)數(shù)學模型還可以描述為矩陣形式:
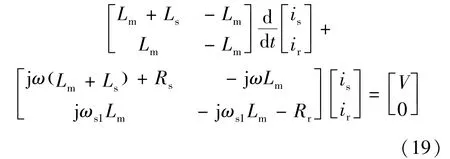
式中:j為虛部符號;is和ir為定子和轉(zhuǎn)子電流;V為定子電壓;ωr和ωs1分別是轉(zhuǎn)速和滑差轉(zhuǎn)速。

圖3 IM等效電路
從圖3和式(19)中可以看出,定子電流是激磁電流和轉(zhuǎn)子電流之和,具體:

同時,基于圖3和式(19),可以得到電磁功率P由機械功率Pm和銅損pr構(gòu)成,具體如下:

電磁轉(zhuǎn)矩T與轉(zhuǎn)子電流ir和滑差轉(zhuǎn)速ωs1的關(guān)系式:

參照圖3,轉(zhuǎn)矩T還可以寫:

因此,滑差轉(zhuǎn)速ωs1和電磁轉(zhuǎn)矩T的關(guān)系式:

測量定子三相電流后通過dq旋轉(zhuǎn)坐標變換,可以得到d,q軸電流id和iq,寫成復變形式為is=id+jiq。根據(jù)磁場定向(以下簡稱FOC)原理,激磁電流完全由d軸電流id提供,即im=id,同時有:

進一步滑差轉(zhuǎn)速:

一般假設(shè)id為零,但考慮到id突變時,磁場不會馬上變化,因此需要選擇合適的iq不同于式(25)的計算結(jié)果以應對氣隙磁鏈的變化,定義以時間常數(shù)Lm/Rr變化的in,具體如下:

從而q軸電流被改寫:

然后,滑差轉(zhuǎn)速新的表達式:

最后的間接矢量控制器如圖4所示。
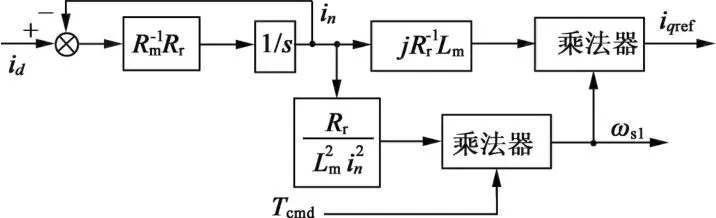
圖4 間接矢量控制器結(jié)構(gòu)
4.2 轉(zhuǎn)矩和電壓前饋補償
為了提高IM驅(qū)動系統(tǒng)的暫態(tài)性能,新型控制器中嵌入了轉(zhuǎn)矩前饋,具體表達式如下:


式中:Kp和Ki分別為比例和積分增益。PI調(diào)節(jié)器引入的目的是為了提高轉(zhuǎn)速跟蹤精度和保證最終靜態(tài)誤差為零。在FOC控制方案中,電流閉環(huán)調(diào)節(jié)的目的是通過計算得到期望的定子電壓。在本文中,所需的電壓由電流閉環(huán)調(diào)節(jié)和輸出電壓前饋共同得到,其中電流閉環(huán)調(diào)節(jié)也采用PI實現(xiàn)。將is=id+jiq和ir=jiq代入式(19)可得到:

假設(shè)Vd是定子電壓的實部,Vq是虛部,則Vd和Vq具體如下:
式(34)中,Ls(diq/dt)是不能忽略的,它在動態(tài)過程中有較大值。當制動過程開始時,電流需要快速改變,Ls(diq/dt)有利于加快動態(tài)響應。
5 試驗驗證
為了驗證新型控制策略的性能,搭建了基于IM的對拖試驗平臺,并開展了相關(guān)試驗。圖5為試驗平臺構(gòu)成,從圖中可以看出,兩臺IM同軸聯(lián)接,具體的電機參數(shù)如表1所示,同時為了方便試驗和安全考慮,將可調(diào)直流電源代替電池組給變頻器供電。控制算法采用TI公司的DSP芯片作為載體,具體型號為TMS320F28335,其含有多路采樣通道,并能輸出PWM信號。整個試驗系統(tǒng)不含有電壓或轉(zhuǎn)速傳感器,僅使用了電流傳感器對電機定子的A相和B相電流進行測量(C相計算得到)。試驗中分別對負載電機和驅(qū)動電機設(shè)置成轉(zhuǎn)速和轉(zhuǎn)矩控制模式,而工控機,即主機通過CAN通訊給DSP發(fā)送轉(zhuǎn)矩和轉(zhuǎn)速指令,同時主機還控制可調(diào)直流源進行直流電壓穩(wěn)壓和過流保護。FBLSMO的參數(shù)設(shè)置為:λ1=950,λ2=765和φ1=5.85。 PI調(diào)節(jié)器的參數(shù)設(shè)置:KPω=1.74,KIω=0.04,KPψd=24.5,KIψd=3.8,KPVd=3.5,KIVd=0.09,KPVq=3.5和 KIVq=0.09。

圖5 試驗平臺構(gòu)成
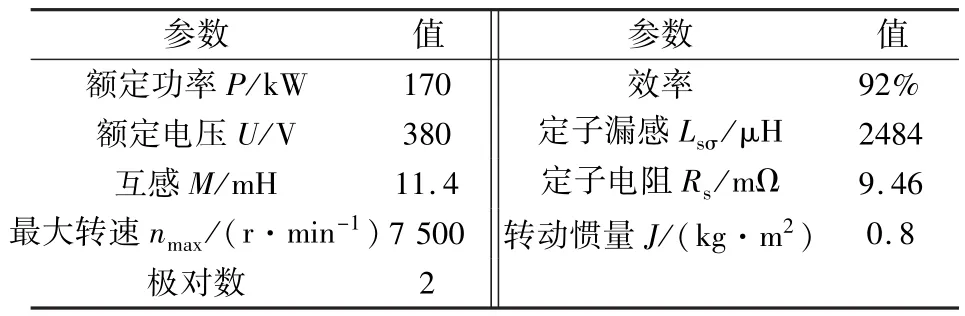
表1 試驗用IM額定參數(shù)
為了驗證所設(shè)計滑模觀測器的精度,安裝了轉(zhuǎn)速編碼器進行轉(zhuǎn)速測量。首先控制電機在恒定轉(zhuǎn)矩為50 N·m時進行轉(zhuǎn)速和轉(zhuǎn)子磁鏈估計試驗,試驗結(jié)果如圖6所示。為了驗證觀測器的魯棒性,分別將設(shè)置了200%定子電阻、200%定子電感和50%轉(zhuǎn)矩的參數(shù)擾動,從試驗結(jié)果來看,即使在參數(shù)擾動下,估計的轉(zhuǎn)速和磁鏈都能夠很好地跟蹤實際轉(zhuǎn)速和磁鏈,故FBLSMO的性能得到了驗證。
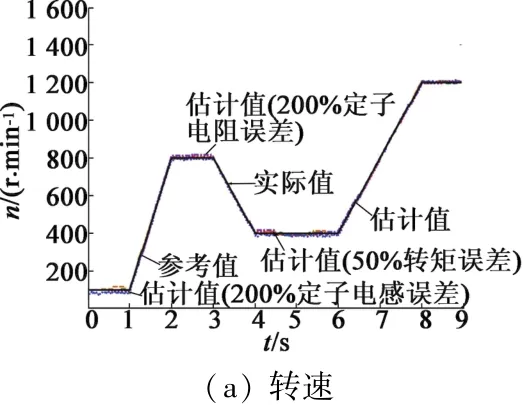
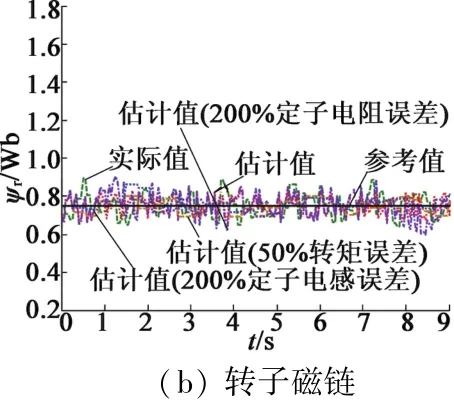
圖6 試驗中FBLSMO的估計值和參考值比較
值得注意的是,電機時間常數(shù)的變化可能會影響磁鏈估計和進一步的試驗結(jié)果,但是新型FBLSMO觀測器并不高度依賴電機參數(shù),魯棒性很好,因此電機參數(shù)的變化導致電機時間常數(shù)變化并不能顯著影響控制器。試驗中對應的定子d,q軸電壓和電流如圖7和圖8所示,從圖中可看出,當電機加速時,d軸電壓存在一個下降斜坡,同樣電機減速時存在一個上升斜坡,這加快了動態(tài)響應。
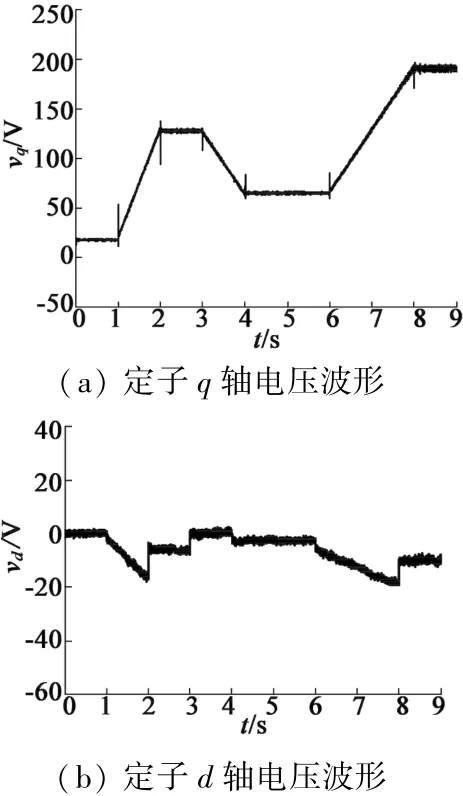
圖7 試驗中定子d,q軸電壓波形
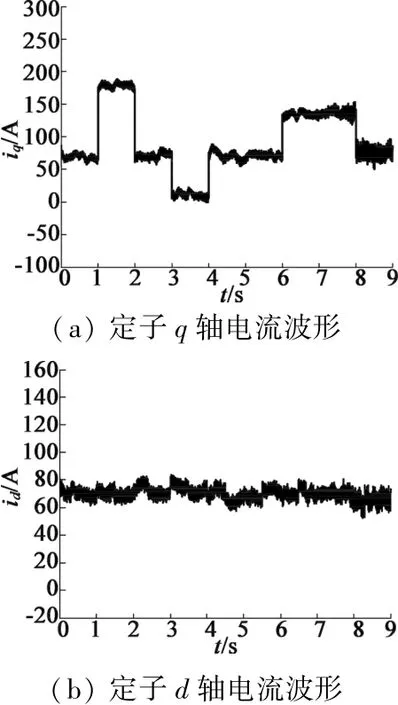
圖8 試驗中定子d,q軸電流波形
為了進一步驗證控制策略對EV的適用性,采用了轉(zhuǎn)速指令循環(huán)曲線如圖9所示[10]。在循環(huán)試驗中,負載電機轉(zhuǎn)速波形和驅(qū)動電機轉(zhuǎn)矩波形如圖10所示。從圖中可以看出,即使在低轉(zhuǎn)速時,在新型控制策略作用下,速度跟蹤較好,誤差很小。此外,轉(zhuǎn)矩跟蹤控制模式的性能也是較好的,轉(zhuǎn)矩脈動很小。
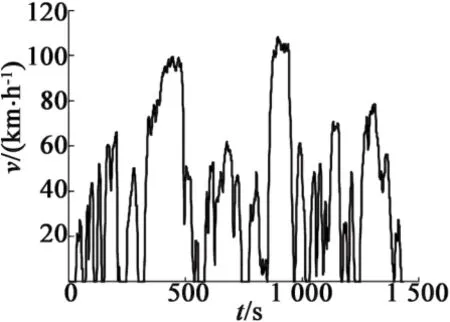
圖9 轉(zhuǎn)速循環(huán)測試中轉(zhuǎn)速參考曲線
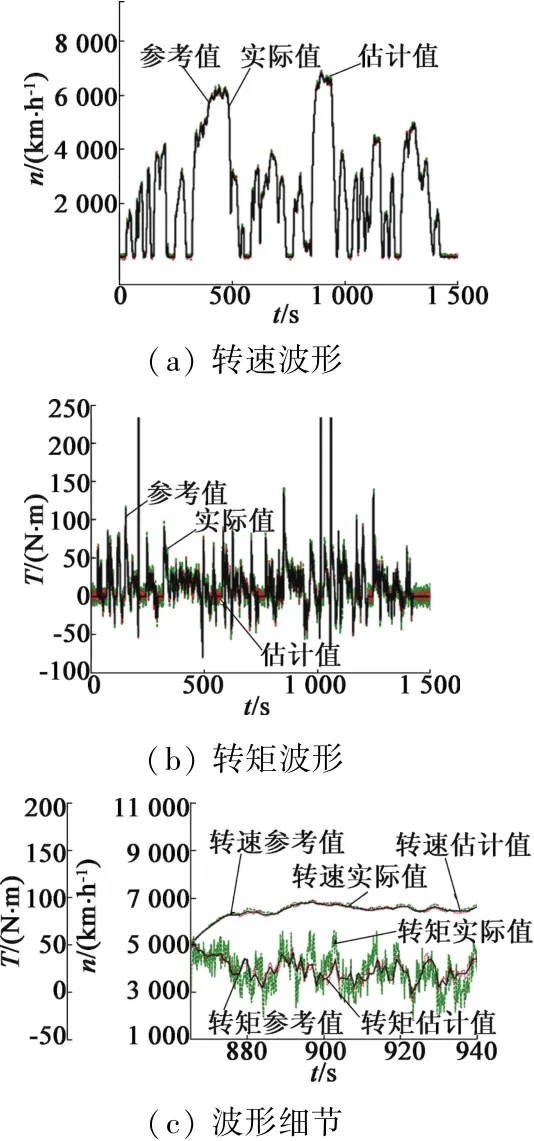
圖10 轉(zhuǎn)速循環(huán)測試結(jié)果
6 結(jié) 語
本文介紹了一種用于EV的無速度傳感器IM驅(qū)動控制策略,結(jié)合使用了間接矢量控制器和FBLSMO滑模觀測器。由于只有定子電流需要被測量,因此系統(tǒng)成本降低,同時系統(tǒng)可靠性提高。文中給出了FBLSMO詳細的設(shè)計過程,即使在不知道負載轉(zhuǎn)矩的情況依然可以準確地估計出轉(zhuǎn)速和磁鏈。而間接矢量控制器包含了前饋環(huán)節(jié),系統(tǒng)響應速度也得到了提高。最后通過試驗,驗證了新型控制器的性能。
[1] 申永鵬,王耀南,孟步敏,等.增程式電動汽車功率流優(yōu)化策略[J].中國電機工程學報,2015,35(16):4035-4042.
[2] 陳麗丹,聶涌泉,鐘慶.基于出行鏈的電動汽車充電負荷預測模型[J].電工技術(shù)學報,2015,30(4):216-225.
[3] 李佩杰,林頌晨,白曉清,等.計及配電網(wǎng)三相模型的電動汽車充電滾動時域控制[J].中國電機工程學報,2016,36(17):4533-4542.
[4] 陳靜鵬,樸龍健,艾芊,等.基于分布式控制的電動汽車分層優(yōu)化調(diào)度[J].電力系統(tǒng)自動化,2016,40(18):24-31.
[5] 趙志剛,駱志偉,胡小龍,等.四輪獨立驅(qū)動電動車控制系統(tǒng)設(shè)計與研究[J].微特電機,2016,44(11):51-53.
[6] 孫悅超.電動汽車驅(qū)動方式及未來發(fā)展[J].電機與控制應用,2016,43(11):98-102.
[7] DIXON J,NAKASHIMA I,ARCOS E F,et al.Electric vehicle using a combination of ultracapacitors and ZEBRA battery[J].IEEE Transactions on Industrial Electronics,2010,57(3):943-949.
[8] KIM D,HWANG S,KIM H.Vehicle stability enhancement of fourwheel-drive hybrid electric vehicle using rear motor control[J].IEEE Transactions on Vehicular Technology,2008,57(2):727-735.
[9] AKIN B,OZTURK S B,TOLIYAT H A,et al.DSP-based sensorless electric motor fault-diagnosis tools for electric and hybrid electric vehicle powertrain applications[J].IEEE Transactions on Vehicular Technology,2009,58(6):2679-2688.
[10] ORTUZAR M,MORENO J,DIXON J.Ultracapacitor-based auxiliary energy system for an electric vehicle:Implementation and evaluation[J].IEEE Transactions on Industrial Electronics,2007,54(4):2147-2156.
[11] 康敏,孔武斌,黃進.電動汽車用五相感應電機容錯控制[J].電機與控制學報,2014,18(3):1-6.
[12] 張興華,孫振興,王德明.電動汽車用感應電機直接轉(zhuǎn)矩控制系統(tǒng)的效率最優(yōu)控制[J].電工技術(shù)學報,2013,28(4):255-260.
[13] 裴文卉,符曉玲,張承慧.電動汽車用感應電機動態(tài)平衡點的反饋耗散Hamilton控制[J].控制理論與應用,2013,30(9):1138-1144.
[14] YANG Y P,LIU J J,WANG T J,et al.An electric gearshift with ultracapacitors for the power train of an electric vehicle with a directly driven wheel motor[J].IEEE Transactions on Vehicular Technology,2007,56(5):2421-2431.
[15] LIN F J,HUNG Y C,HWANG J C,et al.Digital signal processor-based probabilistic fuzzy neural network control of in-wheel motor drive for light electric vehicle[J].Iet Electric Power Applications,2012,6(2):47-61.
[16] GHARIANI M,HACHICHA M R,LTIFI A,et al.Sliding mode control and neuro-fuzzy network observer for induction motor in EVs applications[J].International Journal of Electric&Hybrid Vehicles,2011,3(1):20-46.
[17] 肖海峰,賀昱耀,李凱.直接轉(zhuǎn)矩變結(jié)構(gòu)控制的無速度傳感器交流感應電機系統(tǒng)[J].微特電機,2014,42(1):63-65.
[18] 韋文祥,劉國榮.基于擴展狀態(tài)觀測器模型與定子電阻自適應的磁鏈觀測器及其無速度傳感器應用[J].中國電機工程學報,2015,35(23):6194-6202.
[19] ORLOWSKAKOWALSKA T,DYBKOWSKI M.Stator-currentbased MRAS estimator for a wide range speed-sensorless induction-motor drive[J].IEEE Transactions on Industrial Electronics,2010,57(4):1296-1308.
[20] MAITI S,CHAKRABORTY C.An alternative adaptation mechanism for model reference adaptive system based sensorless induction motor drive[J].Electric Power Components&Systems,2010,38(6):710-736.
[21] 程代展.應用非線性控制[M].北京:機械工業(yè)出版社,2009.
