基于量測分配的SMC-PHD改進(jìn)算法
2017-05-03 05:41:25樊鵬飛李鴻艷
彈箭與制導(dǎo)學(xué)報 2017年4期
樊鵬飛, 李鴻艷, 王 雪
(空軍工程大學(xué)信息與導(dǎo)航學(xué)院, 西安 710077)
0 引言
隨著有限隨機(jī)集的提出,概率假設(shè)密度(probability hypothesis density,PHD)濾波算法開始逐漸用于解決多傳感器多目標(biāo)跟蹤問題[1-3]。PHD的一個顯著優(yōu)點是把多傳感器多目標(biāo)問題看作單傳感器單目標(biāo)處理,避免了數(shù)據(jù)關(guān)聯(lián)計算,大大降低計算量,實現(xiàn)簡單。文獻(xiàn)[4-5]利用序列蒙特卡羅(SMC)思想給出了PHD濾波器的SMC實現(xiàn),即序貫蒙特卡羅概率假設(shè)密度(sequence Monte Carlo probability hypothesis density,SMC-PHD)濾波。
通常,為了確保濾波效果,SMC-PHD算法需要大量粒子才能達(dá)到一個較高的估計精度,這就導(dǎo)致了耗時長和效率低等問題[6-7]。在迭代中,最耗時的步驟是SMC-PHD的更新。并且目標(biāo)的數(shù)目增多,運(yùn)算量和計算的復(fù)雜度也隨之增大,估計精度也會明顯下降。另外,對于不同類型的目標(biāo)(如存活目標(biāo)、新生目標(biāo)等)使用同樣的全部量測數(shù)據(jù)集進(jìn)行目標(biāo)狀態(tài)更新,加大了與目標(biāo)無關(guān)的量測(如雜波或其他無關(guān)目標(biāo)的量測干擾等)對目標(biāo)狀態(tài)更新的影響,導(dǎo)致目標(biāo)估計精度隨之下降,且估計性能對雜波較敏感,密集目標(biāo)的情況下這些問題將更加凸顯。
為了解決粒子概率假設(shè)密度濾波在更新中存在的這些問題,許多學(xué)者提出了行之有效的改進(jìn)方法。文獻(xiàn)[8]基于最近鄰的思想,提出了一種sigma門限策略,僅僅使用最近的量測值更新粒子。文獻(xiàn)[9]中基于量測信息的目標(biāo)PHD分解思想,提出了一種新生目標(biāo)強(qiáng)度未知的門限粒子PHD濾波器。文獻(xiàn)[10-11]基于簇的思想,在粒子PHD一步預(yù)測之后,結(jié)合Mean-Shift算法將粒子劃分為多個簇,每個簇代表一個目標(biāo)的狀態(tài)分布,通過對每個簇中粒子使用簇中的量測集進(jìn)行粒子的更新,減少計算復(fù)雜度。文中基于量測分配的思想,提出了一種在現(xiàn)有序列蒙特卡羅概率假設(shè)密度濾波算法基礎(chǔ)上的SMC-PHD改進(jìn)算法,并給出了其實現(xiàn)方法。
1 序列蒙特卡羅概率假設(shè)密度濾波算法
設(shè)狀態(tài)空間Es上的狀態(tài)RFS為X,它的一階矩(PHD)是Es上的非負(fù)函數(shù)v(·),對于任何S?Es,PHD的集值積分可表示為:
(1)
SMC-PHD濾波器的基本思想是在濾波過程中迭代用來表示后驗強(qiáng)度的權(quán)值和粒子集合,其迭代過程包括預(yù)測步和更新步[4-5]。
1.1 預(yù)測步驟
假設(shè)給定k-1時刻的后驗強(qiáng)度vk-1(x),即
(2)

假設(shè)k時刻新生目標(biāo)的隨機(jī)有限集的PHD為γk,則預(yù)測的強(qiáng)度vk|k-1(x)可表示為:
(3)
式中Lγ,k為新生目標(biāo)的預(yù)測粒子數(shù)。
(4)
(5)
(6)
(7)
1.2 更新步驟
假設(shè)給定k時刻的預(yù)測強(qiáng)度vk|k-1(x),即:
(8)
在得到新的量測值集合Zk后,更新粒子的權(quán)值進(jìn)而估計PHD函數(shù)vk,則更新的強(qiáng)度vk(x)可表示為:
(9)
式中:
(10)
(11)
(12)
其中:gk(·|·)表示k時刻目標(biāo)的似然函數(shù);κk(z)=λkck(z)表示雜波強(qiáng)度;ck(z)表示雜波概率密度;每個時刻雜波個數(shù)服從參數(shù)為λk的Poisson分布;pD,k表示傳感器檢測概率。
1.3 重采樣
和標(biāo)準(zhǔn)SMC濾波算法類似,SMC-PHD濾波器同樣存在粒子退化問題,為了降低退化問題的影響,需要對粒子進(jìn)行重采樣。

1.4 多目標(biāo)狀態(tài)提取
2 改進(jìn)的SMC-PHD更新算法
傳統(tǒng)SMC-PHD濾波器將已有目標(biāo)和新生目標(biāo)的強(qiáng)度在預(yù)測步后就進(jìn)行合并,如式(3)所示,式(10)中使用同樣的全部量測數(shù)據(jù)集進(jìn)行目標(biāo)狀態(tài)更新,增大了與目標(biāo)無關(guān)的量測對目標(biāo)狀態(tài)更新的影響,導(dǎo)致濾波效率不高、目標(biāo)估計性能下降[12]。
傳統(tǒng)SMC-PHD算法假設(shè)新生目標(biāo)先驗已知(如新生目標(biāo)強(qiáng)度在某些預(yù)先指定區(qū)域內(nèi)均勻分布),而更新步驟卻利用全部量測數(shù)據(jù)對新生目標(biāo)狀態(tài)進(jìn)行更新,使得大部分量測數(shù)據(jù)并不能反映出新生目標(biāo),增大了虛警;對于存活目標(biāo),使用全部量測數(shù)據(jù)進(jìn)行更新使得整個量測空間中的雜波都參與更新計算,導(dǎo)致已有目標(biāo)估計精度性能下降,特別是在目標(biāo)密集和高雜波的情況下,估計的性能下降特別明顯。針對上述問題,文中提出一種結(jié)合最新量測信息,將目標(biāo)分為存活目標(biāo)和新生目標(biāo)分別同時處理(它生目標(biāo)的情況當(dāng)作新生目標(biāo)情況處理),將量測數(shù)據(jù)最優(yōu)分配給已有目標(biāo)和新生目標(biāo),再對兩類目標(biāo)分別進(jìn)行更新計算,降低量測集對目標(biāo)更新時的盲目性,同時減少量測中的雜波成分,提高了算法估計性能。
2.1 粒子分配
假設(shè)給定k時刻的預(yù)測強(qiáng)度vk|k-1(x),在得到新的量測值集合Zk后,更新的強(qiáng)度vk(x)可表示為:[12]
vk(x)=vk,b(x)+vk,p(x)
(13)
式中:vk,b(x)為新生目標(biāo)PHD函數(shù),vk,p(x)為存活目標(biāo)PHD函數(shù)。由于新生目標(biāo)除采樣不同,其他步驟與存活粒子相似,因此為簡化算法,這里只介紹存活粒子的分配。
在耕地緩沖100 m范圍內(nèi)農(nóng)村居民點面積與數(shù)量最多,分別占比83.5%和71.5%,且景觀形態(tài)指數(shù)遠(yuǎn)大于其他區(qū)域,原因是區(qū)域內(nèi)農(nóng)村居民點布局受耕地分割嚴(yán)重,導(dǎo)致離散程度較高。距耕地200 m以外區(qū)域,農(nóng)村居民點斑塊所占景觀比例僅有0.3%,且斑塊密度與景觀形態(tài)指數(shù)均最低,表明耕地對其分布影響大。平均斑塊面積與標(biāo)準(zhǔn)差各區(qū)域相差不大,則耕地對農(nóng)村居民點規(guī)模影響不大。形狀指數(shù)在100 m~200 m區(qū)域內(nèi)最大,此區(qū)域農(nóng)村居民點建設(shè)既少受到耕地布局的限制,又不會因距離耕地較遠(yuǎn)而丟失部分生產(chǎn)生活功能,因此形狀更為復(fù)雜。
對量測集中的每一個量測,需要結(jié)合最新量測集中的各個量測信息與目標(biāo)粒子的單步預(yù)測狀態(tài)的似然值,計算量測-粒子對的匹配概率,并在此基礎(chǔ)上分配預(yù)測的粒子集。計算匹配概率:
(14)
式中:pij表示k時刻第i個粒子與第j個量測的匹配程度。特別的,當(dāng)j=0時,表示粒子沒有量測與之匹配,代表漏檢。
(15)
在式(14)和式(15)的基礎(chǔ)上,對粒子進(jìn)行量測的分配。計算:
(16)
式中mk為k時刻量測集的個數(shù)。
現(xiàn)在根據(jù)概率將量測分配給相對應(yīng)的粒子。注意:①可能出現(xiàn)量測沒有粒子與之匹配的情況p0(j),此時量測很有可能是由雜波(虛警)引起的,因此其概率p0(j)=0,這在一定程度上能減少雜波的影響。②漏檢是造成粒子退化的一個重要因素,這里為pi(0)設(shè)置一個門限,這個門限既可以緩解粒子退化,也可以防止未被檢測到的目標(biāo)被忽略掉。文中的門限策略參考文獻(xiàn)[13]。③這里的量測和粒子不是根據(jù)概率大小一一對應(yīng)的,存活目標(biāo)或雜波可能與同一粒子配對,同樣粒子根據(jù)門限(threshold)也可能與多個量測配對,這與數(shù)據(jù)關(guān)聯(lián)中目標(biāo)、量測的一一對應(yīng)是不一樣的。
2.2 粒子更新
對傳統(tǒng)SMC-PHD的更新步驟進(jìn)行改進(jìn)。
在給定k時刻的存活目標(biāo)的預(yù)測強(qiáng)度vk|k-1,p(x),即:
(17)
在得到新的量測值集合Zk后,更新粒子的權(quán)值進(jìn)而估計PHD函數(shù)vk,p,則更新的強(qiáng)度vk,p(x)可表示為:
(18)
(19)
3 仿真實驗
驗證文中算法,共有3個目標(biāo),存在時間分別為1~35 s、5~40 s、12~40 s,初始狀態(tài)分別為[100.4,2.6,100.1,3]T、[99,3,99.7,2]T、[99.5,2,100.1,4]T,采樣周期T=1 s,仿真40步,目標(biāo)狀態(tài)向量為xk,目標(biāo)運(yùn)動方程為:
xk=Fxk-1+Γωk
(20)

傳感器位置為坐標(biāo)原點,量測方程為:
(21)
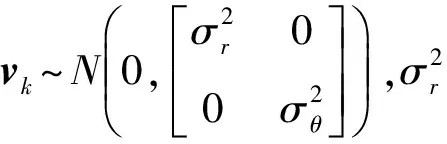

圖1是目標(biāo)運(yùn)動軌跡圖和估計結(jié)果圖;圖2是文中改進(jìn)算法與傳統(tǒng)SMC-PHD在100次蒙特卡羅仿真的平均OSPA距離對比;圖3是算法的100次蒙特卡羅仿真中估計的目標(biāo)個數(shù)平均值與真實目標(biāo)個數(shù)的對比。
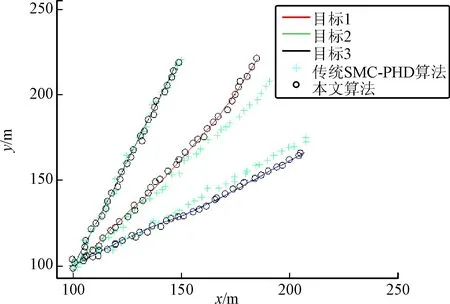
圖1 目標(biāo)運(yùn)動軌跡和估計結(jié)果
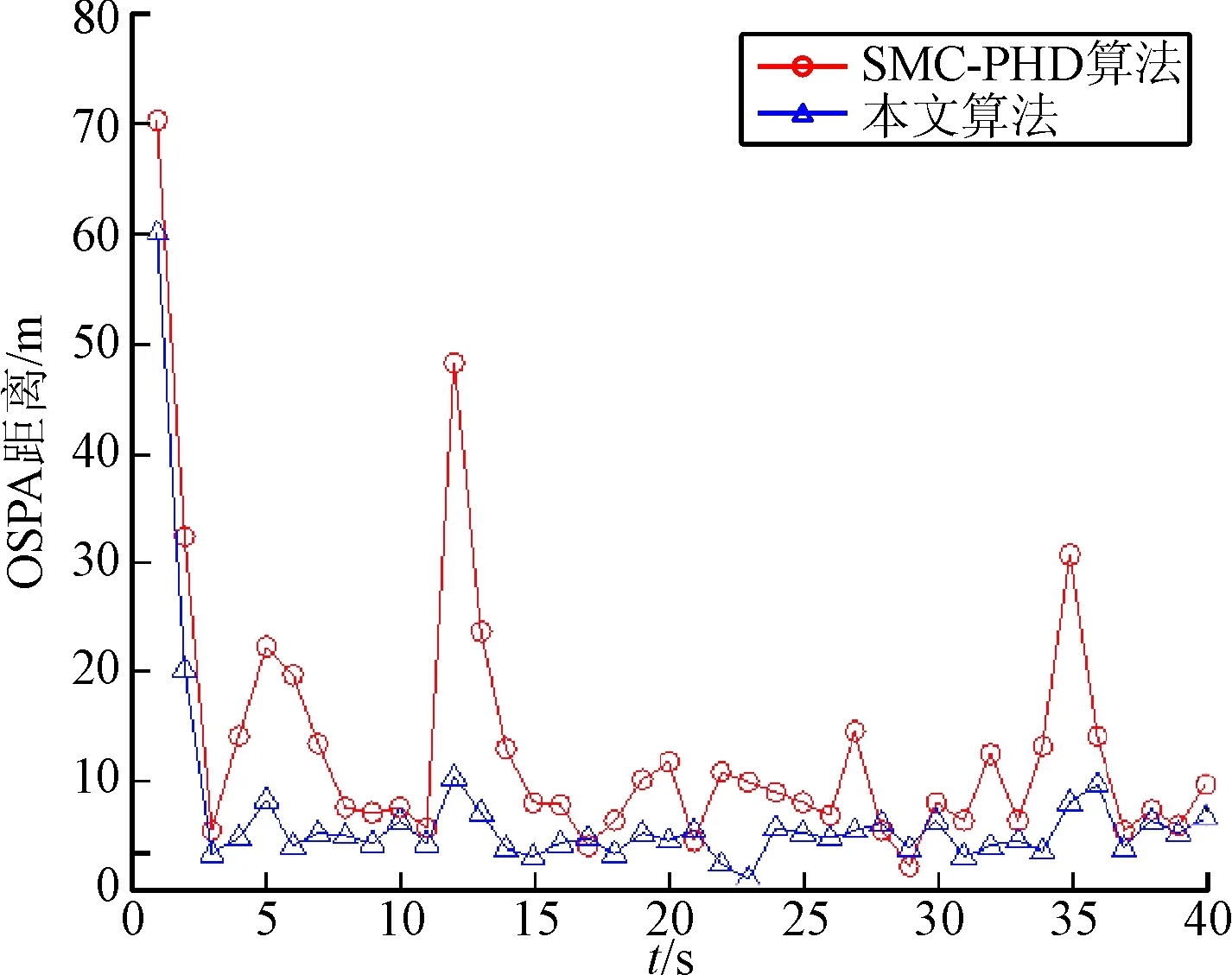
圖2 平均OSPA距離對比(λk=30
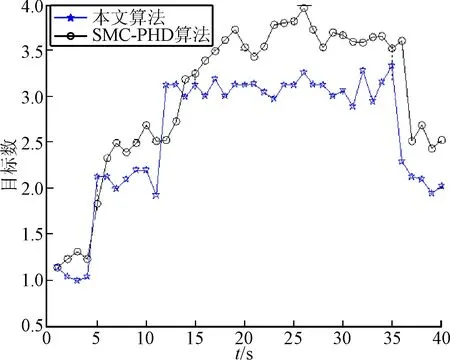
圖3 目標(biāo)個數(shù)估計
由圖2可以看出,在100次蒙特卡羅仿真中,平均OSPA距離顯著增加,文中的改進(jìn)算法的平均距離在[0,10]區(qū)間內(nèi)抖動,比較穩(wěn)定,特別是c=30并且3個目標(biāo)同時存在的時間段,文中改進(jìn)算法的平均OSPA距離明顯低于傳統(tǒng)的SMC-PHD,跟蹤性能有明顯提高。從圖3可以看出,文中算法的目標(biāo)估計個數(shù)與真實目標(biāo)個數(shù)非常接近,這從另一個方面證實了文中算法的優(yōu)越性。
4 結(jié)論
文中提出的基于量測分配的SMC-PHD改進(jìn)算法結(jié)合最新量測集中的各個量測信息與目標(biāo)粒子的單步預(yù)測狀態(tài)的似然值,以概率選取量測值,合理的對粒子PHD算法的更新步驟進(jìn)行改進(jìn),顯著增強(qiáng)了粒子PHD濾波算法的魯棒性,提高了估計精度。
參考文獻(xiàn):
[1] MAHLER R P S. Multitarget Bayes filtering via first-order multi-target moments [J]. IEEE Transactions on Aerospace and Electronic Systems, 2003, 39(4): 1152-1178.
[2] MAHLER R P S, Mahler. PHD filters of higher order in target number [J]. IEEE Transactions on Aerospace and Electronic Systems, 2007, 43(4): 1523-1543.
[3] VO Ba-Tuong, VO Ba-Ngu, ANTONIO Comtoni,et al. The cardinality balanced multi-target multi-bernoulli filter and its implementations [J]. IEEE Transactions on Signal Processing, 2009, 57(2): 409-423.
[4] VO Ba-Ngu, SINGH S,DOUCET A, et al. Sequential Monte Carlo methods for multitarget filtering with random finite sets [J]. IEEE Transactions on Aerospace and Electronic Systems, 2005, 41(4): 1224-1245.
[5] VO Ba-Ngu, SINGH S, DOUCET A. Random finite sets and sequential Monte Carlo methods in multi-target tracking [C]// IEEE. 2003 Proceedings of the International Conference on Radar. [S.l.]:IEEE, 2003: 486-491.
[6] QUANG Pham Tran Anh, KIM Dong-Sung. Enhancing real-time delivery of gradient routing for industrial wireless sensor networks [J]. IEEE Transactions on Industrial Informatics, 2012, 8(1): 61-68.
[7] MEISSNER D, REUTER S, STRIGEL E, et al. Intersection-based road user tracking using a classifying multiple-model PHD filter [J]. IEEE Intelligent Transportation Systems Magazine, 2014, 6(2): 21-33.
[8] LI T, SUN S, SATTAR T P. High-speed Sigma-gating SMC-PHD filter[J]. Signal Processing, 2013, 93(9): 2586-2593.
[9] RISTIC B, CLARK D, VO Ba-Ngu,et al. Adaptive target birth intensity for PHD and CPHD filters [J]. IEEE Transactions on Aerospace and Electronic Systems, 2012, 48(2): 1656-1668.
[10] SHI Zhiguo, ZHENG Yunmei, BIAN Xiaomeng, et al. Threshold-based resampling for high-speed particle PHD filter [J]. Progress in Electromagnetics Research, 2013, 136: 369-383.
[11] WANG Junjie, ZHAO Lingling, SU Xiaohong, et al. Cluster-based efficient particle PHD filter [C]∥ IEEE. 2015 International Conference on Control, Automation and Information Sciences.[S.l.]:IEEE, 2015: 219-224.
[12] RISTIC B, CLARK D, VO Ba-Ngu, et al. Adaptive target birth intensity for PHD and CPHD filters [J]. IEEE Transactions on Aerospace and Electronic Systems, 2012, 48(2): 1656-1668.
[13] 徐從安, 劉瑜, 熊偉, 等. 新生目標(biāo)強(qiáng)度未知的雙門限粒子PHD濾波器 [J]. 航空學(xué)報, 2015, 36(12): 3957-3969.
[14] CLARK D E, BELL J. Multi-target state estimation and track continuity for the particle PHD filter [J]. IEEE Transactions on Aerospace and Electronic Systems, 2007, 43(4): 1441-1453.
