有大型撓性附件的衛(wèi)星姿態(tài)線性魯棒控制器設計研究
2017-04-28 01:26:19何益康胡恒建錢方亮鐘金鳳
上海航天 2017年2期
劉 剛,鐘 超,何益康,胡恒建,錢方亮,鐘金鳳
(1.上海市空間智能控制技術重點實驗室,上海201109; 2.上海航天控制技術研究所,上海201109)
?
有大型撓性附件的衛(wèi)星姿態(tài)線性魯棒控制器設計研究
劉 剛1, 2,鐘 超1, 2,何益康1, 2,胡恒建1, 2,錢方亮1, 2,鐘金鳳1, 2
(1.上海市空間智能控制技術重點實驗室,上海201109; 2.上海航天控制技術研究所,上海201109)
針對有大型撓性附件的衛(wèi)星高精度高穩(wěn)定度姿態(tài)控制問題,提出了一種基于H2/H∞混合控制理論的控制器設計方法。為盡量減少控制器變量的影響以提高其性能,選擇剛體衛(wèi)星模型建立了控制模型,衛(wèi)星三軸姿態(tài)解耦,基于H∞方法分別設計了三軸控制器。引入三個輸出量,考慮三者間關系,設計相應的加權系數(shù),所得H∞控制器在數(shù)學仿真中有較佳的控制效果。考慮實際工程中源于控制周期和執(zhí)行機構非線性的大幅值高頻干擾等因素,用兩種方法進行改進:一是設計H2/H∞混合控制,抑制噪聲的影響,減小輸出力矩的振蕩;另一是在控制器的速率輸入端添加濾波器,防止轉速飛輪的高頻干擾力矩激發(fā)控制器或整個系統(tǒng)的振動。設計的控制器以被動振動抑制方法為基礎,考慮現(xiàn)有星上單機的技術條件及速率閉環(huán)飛輪的輸出特性,通過選擇合適的性能輸出和反饋信息,在較低的閉環(huán)控制系統(tǒng)帶寬下實現(xiàn)了大型撓性衛(wèi)星的高精度高穩(wěn)定度姿態(tài)控制。由數(shù)學仿真給出了設計的控制器及其性能,仿真和半物理試驗結果均表明設計的H2/H∞混合控制器的控制精度、穩(wěn)定度和撓性振動抑制效果均明顯優(yōu)于傳統(tǒng)比例積分微分(PID)控制器。
大型撓性附件; 姿態(tài)控制;H2/H∞混合控制; 加權系數(shù); 高頻干擾; 魯棒控制; 振動抑制; 半物理仿真試驗
0 引言
有大型撓性附件的衛(wèi)星具轉動慣量大、受到的干擾力矩大、撓性振動頻率低、對中心剛體的耦合作用強、模型不確定性對系統(tǒng)影響較大等特點,姿態(tài)控制難度遠高于傳統(tǒng)衛(wèi)星。此外,針對此類衛(wèi)星提出的空間觀測任務,對指向精度和穩(wěn)定度等的要求都較高。因此,需設計高精度高穩(wěn)定度的姿態(tài)控制器以滿足未來空間任務的需要。傳統(tǒng)PID控制是當前衛(wèi)星姿態(tài)控制采用的主要方法,目前已發(fā)射的衛(wèi)星多采用PID控制或改進PID控制。PID控制器結構簡單,可調(diào)參數(shù)較少,對系統(tǒng)控制模型要求較低,通用性強,可靠性高,可勝任衛(wèi)星撓性附件較小或控制精度要求較低的任務。但由于PID控制器的控制精度與系統(tǒng)的帶寬成正比,當撓性附件較大、振動模態(tài)頻率較低時,為防止控制器激發(fā)撓性附件的振動,閉環(huán)系統(tǒng)的帶寬只能在很低的頻率范圍內(nèi)選取,導致整個系統(tǒng)的外干擾抑制能力變?nèi)酰瑥亩鵁o法得到較高的控制精度。因此,對大撓性衛(wèi)星的高精度高穩(wěn)定度控制,需基于任務要求和現(xiàn)有技術條件設計魯棒性強的控制器。基于H∞理論的控制算法是一種應用廣泛且效果理想的線性魯棒控制方法。自20世紀90年代首次提出用H∞控制方法設計大型復雜衛(wèi)星姿態(tài)控制器以來,國外對基于H∞等線性魯棒控制在衛(wèi)星上的應用進行了大量理論研究,并用于哈勃太空望遠鏡和日本ETS-8等大慣量大撓性衛(wèi)星[1-9]。國內(nèi)目前關于此類問題尚處于理論研究階段,還未有真正的應用。文獻[10-11]對基于輸入成型的大型撓性衛(wèi)星姿態(tài)控制進行了研究。本文在此基礎上,在現(xiàn)有技術條件下,分析衛(wèi)星建模和執(zhí)行機構的不確定性對控制系統(tǒng)的影響,基于H∞理論研究了大撓性衛(wèi)星的姿態(tài)控制,并用數(shù)學和半物理仿真對設計控制器的可實現(xiàn)性和有效性進行驗證。
1 數(shù)學模型
設計控制器時,依據(jù)的數(shù)學模型對控制器的性能、可實現(xiàn)性,以及可靠性等有顯著影響。現(xiàn)階段對有大型撓性附件的衛(wèi)星,工程中一般選擇兩種數(shù)學模型作為控制模型:考慮撓性附件的剛撓耦合動力學模型和傳統(tǒng)剛體模型。選用剛體模型作為控制模型時,撓性振動等可建模的運動只能作為高頻未建模動態(tài)進行處理;選用考慮撓性附件的模型時,模態(tài)的頻率和阻尼等不確定性均可作為參數(shù)不確定性處理,降低最終所得控制器的保守性,利于控制器性能的提高。
由于H∞等線性魯棒控制器可能自帶狀態(tài)變量,且控制器的狀態(tài)變量數(shù)與被控系統(tǒng)的狀態(tài)變量數(shù)成正比。因此,當控制模型中包含撓性附件時,最終得到的控制器階數(shù)與需考慮的撓性模態(tài)數(shù)量有關。一般,單個撓性附件至少有2~3個撓性模態(tài)的影響較大,多個撓性附件需考慮的撓性模態(tài)則更多,導致最終設計的控制器階數(shù)較高,能達十多階甚至數(shù)十階,不僅大幅增加了控制器的復雜程度和實現(xiàn)難度,而且過多的控制器變量也會降低整個系統(tǒng)的可靠性。此外,受目前技術條件限制,星上的大部分模態(tài)撓性無法測量,即模態(tài)信息無法作為控制器的輸入量。控制器設計時采用不激發(fā)撓性振動的被動抑制策略,故控制模型中考慮撓性振動主要是減小控制器設計的保守性,難以顯著提高控制器的性能。因此,與剛撓耦合動力學模型相比,采用剛體動力學雖會增加設計的保守程度,犧牲部分控制器性能,但可明顯降低控制器的階數(shù)。為盡量減少人為添加的控制器變量的影響,提高控制器的可靠性,本文選擇剛體衛(wèi)星模型作為控制模型進行設計。
用誤差四元數(shù)描述的衛(wèi)星姿態(tài)運動學和動力學模型分別可表示為
(1)
(2)

(3)
式中:qbo,qco分別為衛(wèi)星本體系和參考姿態(tài)四元數(shù)的矢部。則ωe可表示為
(4)
式中:ω為衛(wèi)星角速度。
因H∞控制器是針對線性系統(tǒng)設計的,故需對上述誤差四元數(shù)數(shù)學模型在參考姿態(tài)附近進行線性化,得最終用于控制器設計的模型為
(5)
(6)
式中:uc為H∞控制器的輸出量,包括抵消動力學模型中非線性項作用的補償項。
在上述控制模型的建立中,衛(wèi)星三軸姿態(tài)實現(xiàn)了解耦,因此可對三個軸分別進行控制器設計。為提高系統(tǒng)對外界干擾力矩的抑制能力,本文選擇衛(wèi)星的誤差姿態(tài)角(四元數(shù))和誤差角速度作為控制器的輸入量,控制器輸出量為控制力矩,即單軸的控制器為一個雙入單出的系統(tǒng)。雖然此時控制器與傳統(tǒng)的全狀態(tài)反饋靜態(tài)控制器的輸入變量相同,但由于需考慮整個系統(tǒng)包含加權函數(shù)的狀態(tài)變量,其本質仍是輸出反饋控制器。
2 控制器設計
針對大撓性衛(wèi)星自身結構的特點,以及控制模型為剛體模型的限制,為在實現(xiàn)高精度高穩(wěn)定度控制的同時不激發(fā)撓性附件自身的振動,需控制器能在較低的閉環(huán)帶寬下取得較好的不確定性以及外干擾抑制能力。控制器需滿足兩個基本要求:閉環(huán)系統(tǒng)的帶寬足夠低,不會激發(fā)撓性附件等未建模結構的振動;系統(tǒng)對外界干擾及自身的模型不確定性具良好的抑制能力,在滿足穩(wěn)定性條件的同時,能保證控制精度等性能滿足任務要求。
傳統(tǒng)PID控制器時很難同時實現(xiàn)上述要求,但在設計H∞控制器時,可通過選擇合適的性能輸出量及加權函數(shù),構成混合靈敏度問題求解實現(xiàn)。本文選擇如圖1所示的H∞控制系統(tǒng)的性能輸出量進行控制器設計。
圖1中:y為控制器的輸入量,即單軸誤差姿態(tài)角和誤差角速度;u為控制器的輸出量,即控制力矩;G0(s)為名義系統(tǒng)(即不考慮不確定性的理想衛(wèi)星模型)的傳遞函數(shù);Δ(s)為歸一化后的乘性不確定性,滿足Δ(s)<1。三個性能(被調(diào))輸出為z1,z2,z3,其中:z1可反映系統(tǒng)的控制精度以及抗干擾能力,即系統(tǒng)在低頻段的性能;z3可反映系統(tǒng)對模型不確定性的魯棒性,即對高頻不確定性(如撓性模態(tài)、控制器采樣、執(zhí)行機構輸出特性等未建模因素)的抑制能力;z2可起到控制輸出增益限幅的作用,防止控制器輸出的控制力矩過大。針對這三個性能輸出,可得用H∞范數(shù)描述的混合靈敏度問題
(7)
式中:S為系統(tǒng)靈敏度,即不確定性影響w至z1的傳遞函數(shù);R為w至z2的傳遞函數(shù);T為系統(tǒng)閉環(huán)傳遞函數(shù);W1(s)~W3(s)為性能輸出的加權函數(shù);γ為不大于1的正數(shù),為保證系統(tǒng)的魯棒性和減少控制器的保守性,可取γ=1。
通常,為抑制干擾對控制精度的影響,需盡可能降低S在低頻段的增益;為保證控制器輸出的力矩符合實際執(zhí)行機構的要求,需對R進行幅值限制;為抑制高頻模型不確定性的影響并限制系統(tǒng)帶寬,也需在滿足魯棒性要求的情況下盡可能壓低T的高頻增益及轉折頻率。通過引入輸出量z1,z2,z3,控制性能的要求可直接體現(xiàn)在H∞控制器設計中,隨后只需設計加權函數(shù)W1(s)~W3(s),即可得符合第三個要求的控制器。
3 加權函數(shù)設計
由上述分析可知:加權函數(shù)直接決定了控制器的性能,故控制器設計的重點是加權函數(shù)。在設計加權函數(shù)時,需綜合考慮系統(tǒng)的三個性能輸出量間的關系,以及最終得到的系統(tǒng)所需的控制器是否存在,即控制器是否可解。整個過程是一個反復“設計-試驗-再設計”的過程。
輸出量z1反映系統(tǒng)的控制精度及抗干擾能力,設計W1(s)時需使S的頻域響應曲線在低頻段幅值較低,轉折頻率盡可能高,同時保證最終控制器可解。
輸出量z2反映控制器輸出力矩的大小,本文只需選取一固定值,即保證R為有限增益且控制器可解即可。
輸出量z3不僅反映系統(tǒng)對系統(tǒng)模型不確定性的抑制能力,而且直接反映系統(tǒng)的帶寬,因此W3(s)需盡可能覆蓋不確定性的頻域響應曲線,同時不能過于保守而導致系統(tǒng)帶寬無法降低。本文用乘法不確定性描述系統(tǒng)的不確定性,考慮的不確定性包括衛(wèi)星質量、撓性振動和執(zhí)行機構的動態(tài)(采用一階慣性環(huán)節(jié)近似)。設名義模型傳遞函數(shù)為G0(s),則實際模型的傳遞函數(shù)
(8)
式中:
(9)
設計得到的W3(s)需覆蓋不確定性,即滿足
(10)
此外,W3(s)也應保證控制器可解。
加權函數(shù)確定后,即得能用于控制器計算的增廣系統(tǒng)的狀態(tài)空間表達式為
(11)
式中:x為增廣系統(tǒng)的狀態(tài)量(包括姿態(tài)角、角速度以及加權函數(shù)引入的狀態(tài)量);z為性能輸出量;y為反饋至控制器的系統(tǒng)輸出量;w為干擾輸入;u為控制量;A,B1,B2,C1,C2,D11,D12,D21,D22為根據(jù)增廣系統(tǒng)傳遞函數(shù)計算得到的狀態(tài)空間矩陣。得到增廣系統(tǒng)后,用Matlab的魯棒控制工具箱可求得所需的控制器。對求得的控制器進行離散化處理,即可得適于星載軟件的滾動軸離散H∞控制器。
4 飛輪高頻干擾力矩的影響及H2/H∞混合控制
上述求得的H∞控制器在連續(xù)系統(tǒng)數(shù)學仿真中可有非常好的控制效果。但受當前的技術條件所限,實際應用中由于執(zhí)行機構的非線性特性、控制采樣周期,以及測量噪聲等因素的影響,H∞控制器往往不能取得令人滿意的效果。這些影響因素中,控制周期和執(zhí)行機構的非線性對系統(tǒng)影響較大,特別是工作在轉速控制模式的反作用飛輪(以下簡稱為轉速飛輪),會引入大幅值的高頻干擾力矩,對控制效果和穩(wěn)定性的影響非常嚴重。
目前姿態(tài)控制使用的多數(shù)反作用飛輪在轉速(動量)控制模式下工作。轉速飛輪并不直接輸出給定的指令定力矩信號,而是通過跟蹤給定的角動量間接輸出控制力矩。當指令力矩為方波信號時,轉速飛輪響應如圖2所示。其中采樣周期為0.5 s。
由圖2可知:當飛輪工作于轉速模式時,其響應力矩類似于脈沖的形式,且峰值遠大于輸入的指令力矩,可近似視為在原來給定力矩的基礎上疊加了一個大脈沖干擾力矩。通過截取控制過程中某時間段的控制器指令力矩和轉速飛輪實際輸出力矩,并對其進行小波變換,得到各信號的時頻譜,從中可發(fā)現(xiàn)這些疊加的脈沖力矩包含的信號頻率。系統(tǒng)在穩(wěn)態(tài)下50 s內(nèi)的指令力矩和轉速飛輪輸出力矩及其經(jīng)小波變換后的時頻圖如圖3~6所示。
小波變換中,尺度與頻率成反比,尺度值越大,對應的頻率越低。由圖6可知:轉速飛輪輸出力矩在低頻段(大尺度區(qū))與指令力矩類似,但高頻段(小尺度區(qū))的幅值并未衰減,反明顯超過低頻段的峰值(圖6中橢圓區(qū)域)。這些大幅值的高頻干擾力矩會對整個系統(tǒng)的穩(wěn)定性造成嚴重的不良影響。當使用PID控制器時,該特性會限制微分項的取值,降低系統(tǒng)的抗干擾能力。對所設計的H∞控制器,轉速飛輪引入的高頻干擾力矩很可能導致系統(tǒng)振蕩或發(fā)散。
造成上述情況的原因,是因為在加權函數(shù)設計中轉速飛輪的特性難以描述,當控制周期較大時,加權函數(shù)無法保證能覆蓋飛輪引入的不確定性。即使能在頻域分析時近似考慮轉速飛輪的這種不確定性,但由于該不確定性的增益覆蓋范圍較廣,得到的H∞控制器將非常保守,性能遠不能滿足當前任務的要求。因此,在使用轉速飛輪時,H∞控制器難以完成任務。為解決該問題,本文用以下兩種方法對控制器進行改進:
a)改進控制器,抑制測量噪聲對控制器輸出力矩的影響,減少輸出力矩的振蕩;
b)在控制器的速率輸入端添加濾波器,防止轉速飛輪的高頻干擾力矩激發(fā)控制器或整個系統(tǒng)的振動。
對第一種方法,可通過加入H2性能指標,設計H2/H∞混合控制實現(xiàn)。因H2范數(shù)的平方等于系統(tǒng)脈沖響應總的輸出能量,故可一定程度減弱測量噪聲、較長的控制周期,以及飛輪非線性特性對整個系統(tǒng)的影響。
為防止飛輪引入的高頻干擾力矩導致控制器輸出量包含不需要的高頻信號進而激發(fā)系統(tǒng)撓性振動,需選擇干擾力矩作為輸入,控制器的輸出作為H2性能指標的輸出量。此時從輸入至輸出的傳遞函數(shù)與選擇測量噪聲為輸入,系統(tǒng)姿態(tài)角為輸出時的傳遞函數(shù)相同,為不增加w的維數(shù),本文選擇后兩者作為控制器設計時的輸入輸出量。此時被控系統(tǒng)的狀態(tài)空間表達式變?yōu)?/p>
(12)
式中:z∞為H∞性能輸出量;z2為H2性能輸出量;C1∞,D11∞,D12∞,C12,D112,D122為增廣系統(tǒng)的輸出矩陣,可通過將輸入至性能輸出的傳遞函數(shù)轉換至狀態(tài)空間得到。
加入H2性能指標可一定程度降低飛輪輸出力矩中的高頻干擾力矩。但當控制采樣周期較大時,飛輪輸出力矩中的脈沖干擾力矩包含的信號頻譜更廣,加入H2性能指標并不能完全解決高頻干擾力矩的影響。這時需采用上述第二種改進方法,在控制器的速率輸入端添加濾波器。因空間中的干擾力矩頻率較低,與飛輪高頻干擾力矩的頻率間隔較遠,故為簡化控制器的計算,可采用最簡單的一種處理方法,添加低通濾波器濾除高頻干擾力矩的影響。
在相同控制器設計參數(shù)條件下,設低通濾波器時間常數(shù)50 s,H∞控制器、H2/H∞混合控制器和H2/H∞混合控制器+低通濾波器的開環(huán)幅頻曲線仿真結果如圖7所示。由圖7可知:在低頻段,H2/H∞混合控制器的增益較H∞控制器并無衰減,甚至更大,利于對低頻干擾力矩的抑制;在中頻段,H2/H∞混合控制器的增益有所降低,對測量噪聲起到了一定的抑制效果;在高頻段,雖然H2/H∞混合控制器的增益較H∞控制器有一定的降低,但幅值仍較大,存在引起系統(tǒng)振動的風險。添加低通濾波器后,H2/H∞混合控制器在高頻段的增益被限制在較低的范圍內(nèi),可屏蔽飛輪高頻干擾力矩對控制器的影響,防止激發(fā)系統(tǒng)振動。
5 數(shù)學仿真
5.1 輸入條件
在Simulink環(huán)境中對H2/H∞混合控制器進行純數(shù)學仿真以驗證H2/H∞混合控制器的有效性,選取帶有兩個大型撓性附件的衛(wèi)星作為被控對象。仿真輸入條件如下。
仿真模型:剛撓耦合的衛(wèi)星動力學模型;撓性附件展開后整星的真實轉動慣量
控制器計算使用的轉動慣量
撓性附件1(兩個,星體左右對稱安裝)的頻率0.125,0.418,0.430,0.722,1.400,2.112,2.729 Hz;撓性附件2(兩個,星體前后對稱安裝)的頻率0.300,0.438,1.000,1.631,1.999,3.099,3.655,3.919,4.246,4.787,4.808,5.632,5.984 Hz;撓性附件阻尼比0.005;撓性模態(tài)頻率拉偏,縮小為1/3;反作用飛輪,最大角動量25 N·m·s,最大輸出力矩0.2 N·m;星敏感器測量精度優(yōu)于8″;光纖陀螺測量精度優(yōu)于0.000 5 (°)/s;控制周期0.5 s;姿態(tài)采樣延時40 ms;外干擾力矩包括重力梯度力矩、太陽光壓力矩、剩磁干擾力矩和氣動力矩;控制器補償力矩僅包括動力學中的非線性項;初始姿態(tài)偏差,三軸均為0.15°。
5.2 控制器設計結果
根據(jù)上述輸入條件,選取加權函數(shù)
(13)
W1(s),W3(s)的幅頻特性如圖8所示。
由圖8可知:W1(s)在低頻段幅值較大,中頻段幅值下降較緩慢,高頻段則幅值較低,對應的系統(tǒng)靈敏度S將具有相反的特性,即低頻段幅值較低,保證理想情況下系統(tǒng)的控制精度,較寬的中頻段可使系統(tǒng)對分布在一定范圍內(nèi)的低頻外干擾有較好的抑制效果,高頻段受物理特性所限,將穩(wěn)定在0 dB。W3(s)在0.01 rad/s后快速升高,限制了系統(tǒng)帶寬,防止控制器激發(fā)撓性附件的振動。
考察W3(s)對不確定性的覆蓋性。以滾動軸為例,G0(s)W3(s)、考慮撓性模型且轉動慣量拉偏正負20%以及無拉偏的G(s)-G0(s)的奇異值曲線如圖9所示。
此處需說明的是:W3(s)選取時考慮的僅是系統(tǒng)中可用線性模型表示的不確定性,實際系統(tǒng)中還有許多不確定性難以用線性模型描述,無法在Bode圖中表現(xiàn),因此雖然W3(s)的幅頻曲線滿足了性能要求,但實際上很可能存在沒有覆蓋的不確定性,故實際應用時還需對控制器參數(shù)進行調(diào)整。
用Matlab軟件中的相關函數(shù),并進行控制器降階后,即可求得所需的H2/H∞混合控制器。三軸的控制器傳遞函數(shù)矩陣分別如下。
a)滾動軸
(14)
式中:
b)俯仰軸
(15)
式中:
c)偏航軸
(16)
式中:
求得控制器后,考察閉環(huán)系統(tǒng)的靈敏度傳遞函數(shù)和輸入輸出閉環(huán)傳遞函數(shù)與加權函數(shù)的幅頻曲線,結果分別如圖10、11所示。由圖10、11可知:該控制器能使系統(tǒng)的閉環(huán)特性滿足預期的性能。
分析本文設計的控制器的穩(wěn)定性,加入控制器后開環(huán)系統(tǒng)的Bode圖得到系統(tǒng)的穩(wěn)定裕度信息。用H2/H∞混合控制器時衛(wèi)星滾動軸的開環(huán)Bode圖如圖12所示。由圖12可知:系統(tǒng)開環(huán)截止頻率小于0.01 rad/s,相角裕度71.7°,幅值裕度21.6 dB,說明H2/H∞混合控制器帶寬較低,且具較好的穩(wěn)定裕度。
5.3H∞/H2混合控制數(shù)學仿真結果
仿真所得三軸姿態(tài)角及其角速度分別如圖13~16所示,三軸控制力矩和模態(tài)位移分別如圖17、18所示。由圖13~18仿真結果可知:H2/H∞混合控制器控制輸出的指令力矩更平滑,對撓性振動的抑制效果較好,控制精度和穩(wěn)定度非常高,優(yōu)于0.000 5°,遠高于目前星上使用的PID控制器。
6 半物理仿真
半物理試驗中所用姿控設備均為目前星上能使用的單機和傳感器,系統(tǒng)連接如圖19所示。其中:光纖陀螺安裝在三軸轉臺上,可獲得真實的轉動速率。
a)大初始姿態(tài)偏差時H2/H∞混合控制
設衛(wèi)星三軸都存在較大的初始姿態(tài)誤差,分別為滾動軸(6°,0.03 (°)/s)、俯仰軸(1°,-0.001 (°)/s)、偏航軸(2°,0.000 5 (°)/s),用H2/H∞混合控制所得姿態(tài)角、姿態(tài)角速度和控制力矩結果分別如圖20~22所示。
從上述仿真結果可知:無需加入遞階飽和等改進策略,H2/H∞混合控制器就能實現(xiàn)大初始姿態(tài)偏差下大撓性衛(wèi)星的姿態(tài)調(diào)節(jié)控制,且整個過程中撓性附件的振動保持在較小的范圍內(nèi)。收斂過程既表現(xiàn)出了一定的欠阻尼特性(動態(tài)過程的前半段),收斂速度較快,也表現(xiàn)出了過阻尼的特性(動態(tài)過程的后半段),超調(diào)量較小。在仿真中,由于飛輪角動量的限制,俯仰軸和偏航軸的初始角速度的取值較保守,如能增加飛輪的最大角動量,H2/H∞混合控制器可實現(xiàn)更大初始角速度下的姿態(tài)穩(wěn)定控制。
b)H2/H∞混合控制與PID控制比較
對穩(wěn)定控制中傳統(tǒng)PID控制器和H2/H∞混合控制器的控制效果進行比較,以進一步驗證本文設計控制算法的優(yōu)勢。其中:所用PID算法為目前已在軌運行的衛(wèi)星應用的雙環(huán)(串級)PID控制算法。為突出試驗效果,所有模態(tài)頻率均縮小至1/3。試驗結果如圖23~25所示。半物理試驗所得結果見表1。
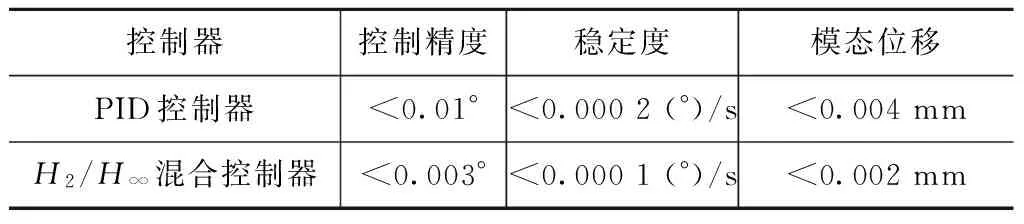
控制器控制精度穩(wěn)定度模態(tài)位移PID控制器<0.01°<0.0002(°)/s<0.004mmH2/H∞混合控制器<0.003°<0.0001(°)/s<0.002mm
由半物理仿真結果可知:H2/H∞混合控制器的控制精度、穩(wěn)定度及撓性振動抑制效果均明顯優(yōu)于傳統(tǒng)的PID控制器。雖然仿真中動力學模型所用的撓性模態(tài)振動頻率與設計值相比縮小了2/3,但由于H2/H∞混合控制器的帶寬較低,所激發(fā)的撓性振動位移仍很小,表明該控制算法對撓性振動有較好的抑制作用。
由上述試驗結果可認為,根據(jù)簡化動力學模型設計的H2/H∞混合控制器能實現(xiàn)高精度高穩(wěn)定度的衛(wèi)星姿態(tài)控制,并在控制過程中將撓性附件的振動模態(tài)抑制在較小的范圍內(nèi)。雖然H2/H∞混合控制器的可靠性略遜于PID控制器,但對撓性振動的被動抑制效果較好,控制精度和穩(wěn)定度更高,如能改善控制周期、飛輪輸出特性等技術條件,H2/H∞混合控制器還可獲得更好的控制效果,在未來的大撓性衛(wèi)星高精度高穩(wěn)定姿態(tài)控制中有較大的應用潛力和價值。
7 結束語
本文基于H∞和H2控制理論設計了有大型撓性附件衛(wèi)星的高精度高穩(wěn)定度控制器。考慮現(xiàn)有的技術條件限制,以被動撓性振動抑制策略為基礎,在不提高控制器帶寬的前提下,提高衛(wèi)星對模型不確定性和外部干擾力矩的抑制能力,實現(xiàn)高精度高穩(wěn)定度控制。本文對設計的控制器進行了數(shù)學和半物理仿真,結果表明:在現(xiàn)有技術條件下,根據(jù)簡化動力學模型設計的H2/H∞混合控制器可用于大撓性衛(wèi)星的姿態(tài)高精度高穩(wěn)定度控制。與傳統(tǒng)PID控制器相比,H2/H∞混合控制器所需的帶寬更低,控制精度更高,受轉動慣量等不確定性的影響更小,對撓性振動的被動抑制效果更強,有非常大的應用潛力和價值。但本文僅針對速率閉環(huán)控制的飛輪特性進行了分析,而實際中姿控系統(tǒng)的執(zhí)行機構還包括噴氣系統(tǒng)、控制力矩陀螺和電推進器等。后續(xù)將進一步研究這些執(zhí)行機構對控制器設計和撓性振動耦合的影響。
[1] SAFONOV M G, CHIANG R Y, FLASHNER H.H(infinity) robust control synthesis for a large space structure[J]. Journal of Guidance, Control, and Dynamics, 1991, 14(3): 513-520.
[2] MCFARLANE D, GLOVER K. A loop-shaping design procedure usingH∞synthesis[J]. IEEE Transactions on Automatic Control, 1992, 37(6): 759-769.
[3] LE BALLOIS S, DUC G.H-infinity control of an Earth observation satellite[J]. Journal of Guidance, Control, and Dynamics, 1996, 19(3): 628-635.
[4] CHIANG R. Integrated robust control design methodology for an advanced S/C with large flexible structure[C]// Proc of AIAA Guidance, Navigation and Control Conference and Exhibit. Honolulu: AIAA, 2008: 2008-701.
[5] BONG W, LIU Q, BAUER F. Classical and robustH, control redesign for the Hubble Space Telescope[J]. Journal of Guidance, Control, and Dynamic, 1993: 16(3): 427-430.
[6] BUKLEY A P. Hubble Space Telescope pointing control system design improvement study results[J]. Journal of Guidance, Control, and Dynamics, 1995, 18(2): 194-199.
[7] OHTANI T, HAMADA Y, NAGASHIO T, et al. Robust attitude control using mu-synthesis for the large flexible satellite ETS-Ⅷ[J]. The Journal of Space Technology and Science, 2009, 25(1): 27-40.
[8] HAMADA Y, OHTANI T, KIDA T, et al. Synthesis of a linearly interpolated gain scheduling controller for large flexible spacecraft ETS-Ⅷ[J]. Control Engineering Practice, 2011, 19(6): 611-625.
[9] NAGASHIO T, KIDA T, HAMADA Y, et al. Robust two-degrees-of-freedom attitude controller design and flight test result for Engineering Test Satellite-ⅧSpacecraft[J]. IEEE Transactions on Control Systems Technology, 2014, 22(1): 157-168.
[10] 胡恒建, 李英波, 施桂國. 空間站帆板驅動輸入成型魯棒控制[J]. 上海航天, 2016, 33(1): 13-18.
[11] 劉德慶, 彭仁軍, 張子龍. 基于路徑規(guī)劃和輸入成型的撓性航天器振動控制方法[J]. 上海航天, 2014, 31(4): 41-47.
Linear Robust Control Design Methodology for Satellite with Large Flexible Structure
LIU Gang1, 2, ZHONG Chao1, 2, HE Yi-kang1, 2, HU Heng-jian1, 2,QIAN Fang-liang1, 2, ZHONG Jin-feng1, 2
(1. Shanghai Key Laboratory of Aerospace Intelligent Control Technology, Shanghai 201109, China;2. Shanghai Institute of Spacecraft Control Technology, Shanghai 201109, China)
A linear robust control designH2/H∞control based onH2/H∞control was put forward for the high precision attitude control system of spacecraft with large flexible structures in this paper. To reduce the effect of controller’s variables and improve the performance of the controller, the ridge body was selected to establish the control model. The satellite attitudes of three axes were decoupled. The controllers of three axes were designed based onH∞method. The three outputs were introduced. The relative weight coefficients were designed with the consideration of the relationship among the three coefficients. The controllerH∞designed had good performance in the numerical simulation. But considering the high frequency disturbance with large amplitude caused by control period and nonlinear actuator in engineering, the controller designed was improved by two ways. One was to designH2/H∞controller to suppress the noise effect and reduce the oscillation of output moment. The other was to add filter to the velocity input end of the controller for avoiding exciting vibration of the controller or the whole system caused by high frequency disturbance moment of rotating flywheel. Based on the passive vibration suppression method, the high-precision controller with low closed-loop bandwidth was obtained through using the linear robust control theory under the consideration of the present onboard states and the output feature of rotation closed-loop flywheel. The controller design and its performance were given by numerical simulation. The results of the numerical simulation and hardware-in-the-loop simulation showed that the performances of theH2/H∞controller designed, such as control accuracy, stability and flexible vibration suppress, were better than traditional PID controller.
large flexible structure; attitude control;H2/H∞control; weight coefficient; high frequency disturbance; robust control; vibration suppression; hardware-in-the-loop simulation
1006-1630(2017)02-0150-11
2016-05-09;
2016-06-08
劉 剛(1985—),男,博士,主要研究方向為大型復雜航天器的高精度高穩(wěn)定度姿態(tài)控制。
V448.22
A
10.19328/j.cnki.1006-1630.2017.02.017
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
科學大眾(2023年17期)2023-10-26 07:39:14
工業(yè)設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數(shù)理化·七年級數(shù)學人教版(2020年10期)2020-11-26 08:24:50
天天愛科學(2020年6期)2020-09-10 07:22:44
數(shù)學物理學報(2020年2期)2020-06-02 11:29:24
數(shù)學物理學報(2017年6期)2018-01-22 02:26:40
家庭影院技術(2017年9期)2017-09-26 03:41:45