多源航跡信息融合主要技術研究
2017-04-22 10:11:15楊曉丹王運峰
現代計算機 2017年8期
楊曉丹,王運峰
(四川大學計算機學院,成都 610065)
多源航跡信息融合主要技術研究
楊曉丹,王運峰
(四川大學計算機學院,成都 610065)
多源信息融合技術是一門廣泛應用于多項其他學科的新技術,它的思想來源于人類認識事物的原理,即融合多方面信息,也就是多源。對多源信息融合技術應用于航跡融合領域的關鍵技術進行綜述,介紹融合系統結構,融合前的時空對準,融合中的數據關聯以及航跡融合算法中的加權平均融合法、自適應加權平均融合法幾個部分。
多源融合;時空對準;數據關聯;航跡融合
0 引言
現今,科學發展趨于高智能化,而智能的主要模板或者說依據本身便是人類,換言之,智能化的發展方向促使許多理論與技術的發明都以模仿人類功能特性為基礎,信息融合正是其中之一。它的出發思想來源于人類認識事物的原理,即人對事物的認識并不是通過單一途徑,而是利用多個感覺器官從事物的各個方面各個角度多方位感知。多源信息融合技術摒除了單一信息源局限不全面的缺點,利用多源信息之間的相關性、互補性,通過相應算法,提取出目標多樣的信息,從而實現更精確的識別。最初的信息融合技術基于軍事目的,尤其是在對飛行目標定位方面成效矚目,越來越受到研究人員的重視[1]。
在如今越發激烈的電子戰背景下,敵我目標識別以及對目標態勢的評估要求愈漸精確。飛行目標定位的不精確性主要來源于兩個方面:硬件及軟件。所謂硬件是指量測設備的技術限制以及環境因素的影響所帶有的誤差,而軟件方面則是指后續數據處理過程中不同算法帶來的誤差。對于做目標定位中數據處理的研究人員來說,怎樣通過處理程序獲得更加精確、穩定的目標信息是關注的焦點,由此,多源信息融合技術應運而生。它通過綜合多個傳感器的量測信息,加以適當算法處理,達到去粗取精的目的,最終能夠摒除質量差的傳感器數據,融合出精度較高的目標位置信息[2]。
1 融合系統結構
多源信息融合系統由其不同的處理性能可分為四種系統結構:集中式融合系統、分布式融合系統、帶反饋的分布式融合系統以及帶反饋的全并行融合系統,如圖1。各種結構的融合系統側重點各不相同,例如集中式融合系統的主要優勢為完整利用了傳感器的信息,即信息損失量小、性能較好,但數據處理量過大將影響計算機運行效率,更關鍵的是增加了后期關聯的難度。相應的,分布式融合系統可以解決集中式融合存在的問題,不過值得注意的是由于采用了局部濾波,數據信息有所損失其性能不如集中式融合。帶反饋的分布式融合即在分布式融合系統的基礎上添加了融合輸出以后的反饋信息,用于狀態預估以便提高處理精度。帶反饋的全并行融合系統是幾個結構中最復雜的處理系統,它多適用于大型處理平臺或數據量相當龐大的處理情境下[3]。
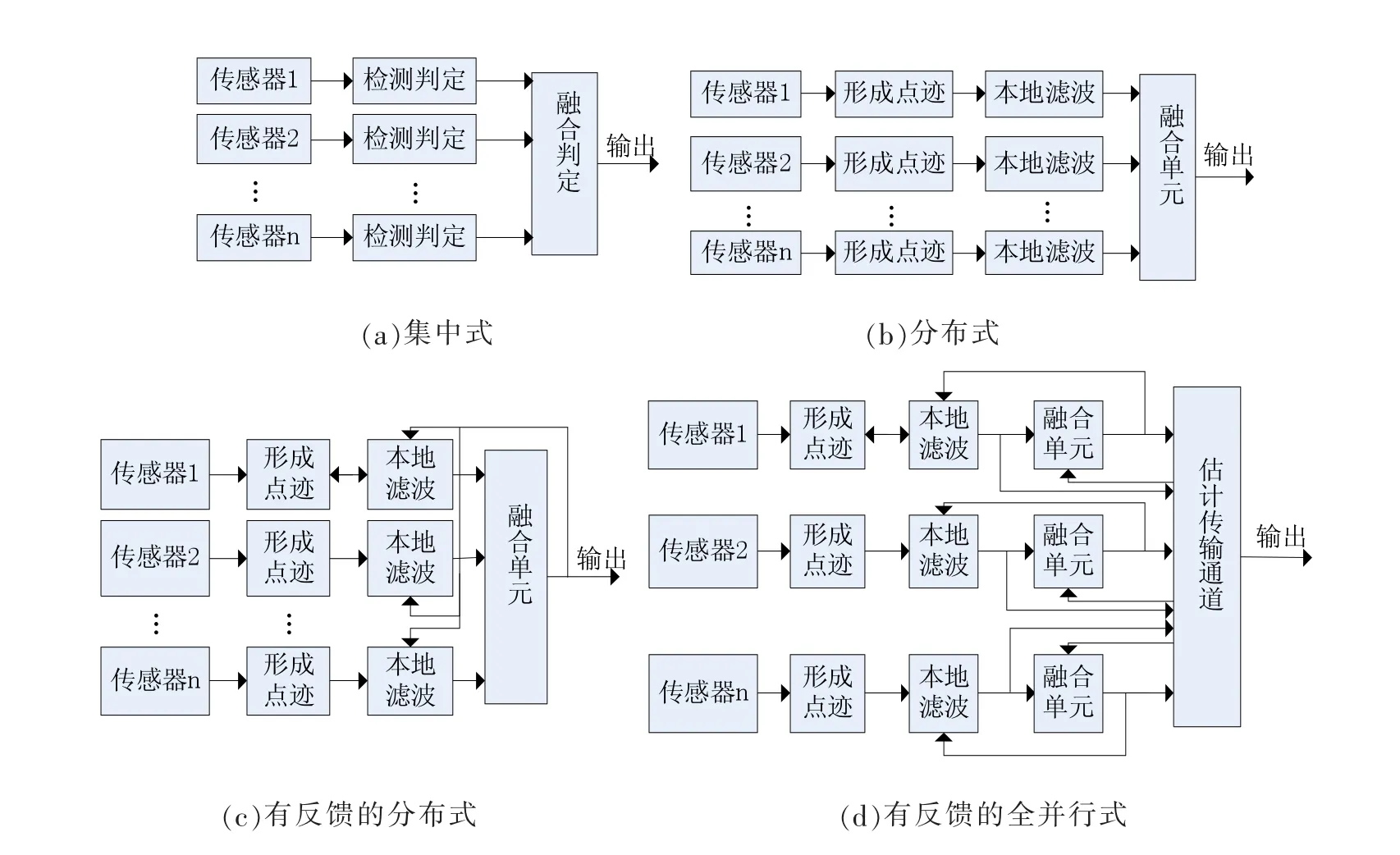
圖1 多源信息融合系統
2 時空對準
信息融合技術實現的基本先決條件即同一時間、同一空間,也就是說,在將多個傳感器收集到的目標數據進行融合之前,首先要確定本次融合的這幾批數據對應于目標在同一時空下的狀態信息。從時間角度來講,由于各傳感器掃描周期不同,即便周期相同傳感器位置不同各自所掃描到的目標時間也都不同,因此,為了準確融合到目標在相同時間點時各傳感器所報告的狀態信息,融合之前必須對目標信息進行時間對準。常用的方法是以最晚報告目標狀態信息的傳感器時間為基準,將其余傳感器報告的位置數據外推到基準傳感器的報告時間點。直線運動時,可采用線性外推法,當目標在轉彎狀態下,應采用曲線擬合、趨勢外推等更為復雜的算法,或者也可以采用線性外推與變更轉彎角度的權值系數相結合的調整方式。
對于來自不同坐標位置的傳感器所報告的目標信息,必須首先進行空間對準,即要將各路數據信息對準到一個融合中心或者說信息處理中心的公共坐標系上。首先需要選擇一個作為基準的大坐標系,原點可以設在地球中心位置處,也可以與其中一個傳感器的坐標原點重合,具體操作時可依照當時環境選取一個便于后續計算的融合中心坐標[4]。一般來說,公共坐標系采用笛卡爾坐標系,但雷達以及大多數傳感器給出的都是距離、方位角、俯仰角數據,也就是說坐標對準之前要進行極坐標與直角坐標的轉換計算,換算公式如下:

其中,r代表目標的斜距,θ為方位角,φ表示俯仰角。
3 數據關聯
數據關聯的目的是為了尋找多路測量信息之間的關系,即判定其是否為一個公共源。經過數據關聯,可以將同一個來源的數據匹配起來,降低后續過程的數據處理量以及復雜程度,其處理結果大致分為三種:一是將當前測量信息與已形成航跡的目標信息匹配起來,即確定兩路測量信息來自同一個源;二是該路信息未能與任何其他信息關聯上,則需新建一個目標集合;三是判定當前測量值為虛警目標,即可能是由于雜波、干擾或者噪聲產生的。
數據關聯過程首先要設定一個關聯門,用于過濾掉基于數理統計或者先驗知識判斷所確定的其他目標的點跡信息,或者說由干擾產生的虛假點跡。幾種常見的關聯門形狀為橢圓形、矩形、截尾扇形和環形,不同關聯門有其自身獨有的特點以及門限計算公式,具體方法可參見參考文獻[5]。
在采用關聯門剔除了絕大多數不可能配對的測量點以后,在余下形成的測量點與航跡的配對中建立關聯矩陣以度量各配對的優劣,從而選出與航跡最為接近的點跡確定關聯。關聯矩陣如下表1所示,其中,Ai表示已知實體,Zj代表觀測信息,Sij則為觀測實體對的一個關聯度量,它旨在反映測量信息與待關聯航跡的接近程度。
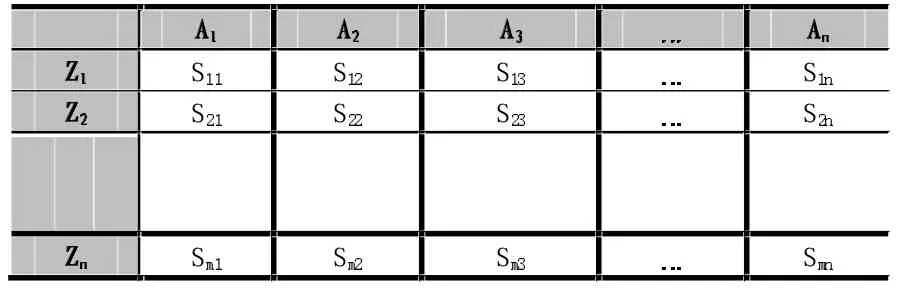
表1 關聯矩陣
4 航跡融合
航跡融合通常分為兩種結構,一是局部與局部航跡融合,另外一種是局部與系統航跡的融合模式。第一種融合結構計算簡便、直觀,其沒有利用前一時刻的系統狀態信息,因而也不產生估計誤差,而后者利用了系統融合航跡的先驗信息,雖然計算量以及復雜程度都有增加,但這種利用了先驗信息的融合估計通常更為準確,還能進一步增加算法進行自適應的狀態估計并融合[6]。兩種融合結構示意圖如圖2所示。
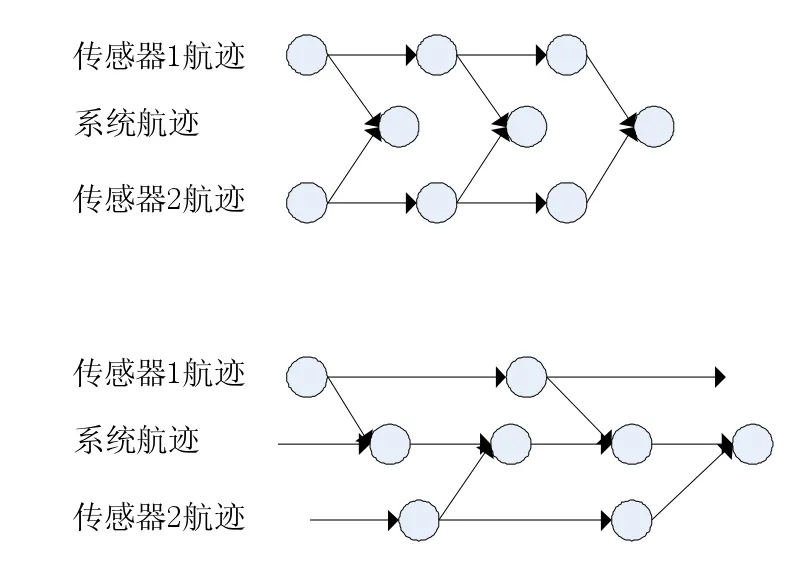
圖2 兩種融合系統結構示意圖
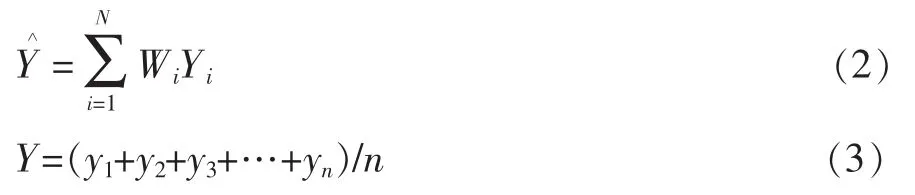
在融合算法部分,常用的融合方法為加權平均融合法,這是一種經典的數據融合問題解決方法,特別是在航跡融合領域應用非常廣泛,它旨在綜合多路傳感器的測量信息,最終得到較高精度的目標定位信息,很多經典的融合算法也是基于加權平均融合法之上的改進。一般的加權平均融合算法公式如下,其中Yi代表測量值,Wi表示權值,N為傳感器觀測數量:
5 結語
在信息技術高速發展的今天,信息融合技術成為更多研究人員關注的重點,它是一門具有結合性質的學科。即是說,信息融合可應用于各行各業,與其他學科中的關鍵技術輔助發展,例如在大數據中應用到了信息融合技術關聯、提取更精確的數據信息,還有在網絡安全領域,利用信息融合技術融合攻擊信號以幫助確定攻擊來源等。同時,信息融合技術也趨向于智能化發展,可將融合過程中加入人工神經網絡算法等以提高權值分配的自適應性。
參考文獻:
[1]喬向東,李濤.多傳感器航跡融合綜述[J].系統工程與電子技術,2009.
[2]何友,王國宏.多傳感器信息融合及應用[M].北京:電子工業出版社,2000.
[3]趙曉嵐.多源信息處理結構研究[J].計算機與數字工程,2009.
[4]張艷艷,董靠譜,高恒.組網雷達時空對準方法[J].火控雷達技術,2013.
[5]楊萬海.多傳感器數據融合及其應用[M].西安:西安電子科技大學出版社,2004.
[6]王軍,蘇劍波,席裕庚.多傳感器融合綜述[J].數據采集與處理,2004.
[7]劉健波,王運鋒.分布式雷達航跡融合關鍵技術研究[J].四川大學學報(工程科學版),2006.
Research on Main Technologies of Multi-Source Track Information Fusion
YANG Xiao-dan,WANG Yun-feng
(College of Computer Science,Sichuan University,Chengdu 610065)
Multi source information fusion technology is a new technology widely used in many other subjects;its idea comes from the principle of human understanding of things,that is through different aspects.Summarizes the key technologies of multi-source information fusion in the field of track fusion,introduces the structure of the fusion system,the spatio-temporal alignment,the data association,the weighted average fusion and the adaptive weighted average fusion in the track fusion algorithm.
Multi-Source Fusion;Space-Time Alignment;Data Association;Track Fusion
1007-1423(2017)08-0008-04
10.3969/j.issn.1007-1423.2017.08.002
楊曉丹(1991-),女,四川成都人,碩士,研究方向不多源信息融合及雷達數據處理
2017-01-05
2017-03-10
國家空管科研課題(No.GKG201403001)
猜你喜歡
今日農業(2021年19期)2022-01-12 06:16:36
當代陜西(2021年17期)2021-11-06 03:21:36
中老年保健(2021年11期)2021-08-22 03:15:44
中學生數理化(高中版.高考數學)(2021年1期)2021-03-19 08:28:38
現代出版(2020年3期)2020-06-20 07:10:34
學苑創造·A版(2018年11期)2018-02-01 06:29:20
中華手工(2017年2期)2017-06-06 23:00:31
讀者(2017年5期)2017-02-15 18:04:18
中外會展(2014年4期)2014-11-27 07:46:46
當代修辭學(2011年2期)2011-01-23 06:39:12
