一種基于聯合變換相關的PSF估計方法*
2017-04-13 09:18:51王宏力陸敬輝
傳感技術學報 2017年2期
關鍵詞:振動
張 濤,王宏力,陸敬輝,姜 偉
(火箭軍工程大學控制工程系,西安710025)
一種基于聯合變換相關的PSF估計方法*
張 濤,王宏力*,陸敬輝,姜 偉
(火箭軍工程大學控制工程系,西安710025)
針對彈體振動引起的星圖成像質量退化的問題,提出了一種基于聯合變換相關的PSF估計方法。首先,在低幀速CCD相機的曝光時間內,利用高幀速CCD相機拍攝得到振動條件下的連續平移星圖序列,將星圖序列的相鄰幀拼接成聯合輸入星圖;其次,采用聯合變換光學相關器作為處理器并引入坐標變換進行相關運算,得到聯合輸入星圖的相對位移矢量,插值處理后估計出模糊星圖的連續PSF;最后進行仿真驗證,仿真結果表明:聯合變換相關法不僅有效克服了僅從單幅模糊星圖估計PSF存在的多解問題,還較準確地估計出了由角振動引起的空間變化模糊星圖的PSF。
圖像處理;PSF估計;聯合變換相關器;振動
星敏感器作為一種具有高測量精度的空間姿態光學敏感器,可為中遠程彈道導彈提高準確的空間方位和姿態基準[1]。當捷聯安裝在彈體的星敏感器進行實時動態成像,除了受到光學系統的衍射、探測器采樣、大氣的擾動等因素影響外,復雜振動環境也降低了星敏感器成像質量,使得星體質心提取精度下降,甚至可能導致星敏感器無法正常完成定姿[2]。因此,如何處理彈體振動引起的星圖模糊就成為了一個亟待解決的問題。
目前,許多學者處理星圖模糊問題常使用的方法為星圖復原法,它是一種軟件處理方法,通過對星圖進行后期處理消除振動模糊,且成本低,算法比較成熟。文獻[3-6]雖然能使模糊星圖達到較好的復原效果,但也存在兩點不足:一是在PSF未知情況下,僅從單幅模糊星圖估計出原始星圖,相當于從1個已知條件求解2個未知數,會存在很多種PSF和復原結果,誤差較大;二是假定星圖受到勻速直線運動或者一維快速簡諧振動影響,這種條件下造成的星圖模糊屬于空間不變模糊,而文章中并未對復雜角振動引起的空間變化模糊進行研究,存在一定局限性。
針對上述分析中存在的不足,本文提出了一種基于聯合變換相關的PSF估計方法。該方法可以通過CCD相機拍攝的多幀星圖中獲得更多的星圖信息,利用聯合相關變換器得到比單幀星圖更為準確的模糊星圖PSF和更加滿意的復原效果。此外,結合坐標變換,本文方法還可以較準確估算角振動引起的模糊星圖PSF。
1 聯合變換相關法原理
聯合變換相關法是對參考星圖和目標星圖進行二維空間相關運算,根據相關函數的峰值位置確定目標星圖相對于參考星圖的位移量[7]。假定目標星圖t(x,y)相對于參考星圖r(x,y)在x、y方向上的振動偏移量為Δx、Δy。如圖1所示,將兩幀星圖分別放置于(-a,0)和(a,0),得到聯合輸入星圖j(x,y)為:

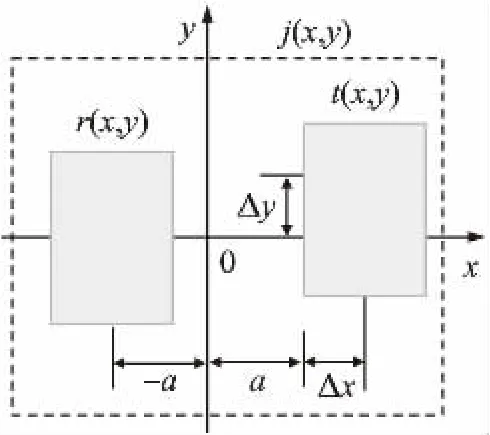
圖1 聯合輸入星圖
對j(x,y)進行一次傅里葉變換,得到其頻譜函數

由式(2)可以得到聯合變換功率譜|J(u,v)|2,表達式如下:
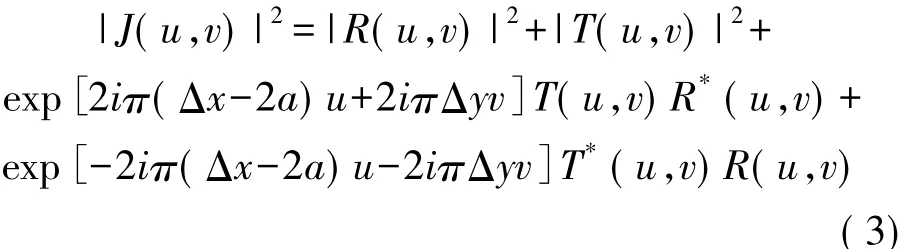
對功率譜|J(u,v)|2做傅里葉變換,便可得到聯合相關輸出:

式(2)~式(4)中,R(u,v)、T(u,v)分別為r(x,y)、t(x,y)的傅里葉變換,R*(u,v)、T*(u,v)為R(u,v)、T(u,v)的復共軛。Crr(x,y)和Ctt(x,y)為自相關,中心坐標均位于(0,0);Ctr(x+2a-Δx,y-Δy)和Crt(x-2a+Δx,y+Δy)為互相關,中心坐標分別位于(Δx-2a,Δy)和(2a-Δx,-Δy)處。從式(4)可以看出,互相關信號包含了像移量Δx、Δy,通過檢測和計算互相關峰相對理想位置(0,±2a)的偏移量,即可得到曝光時間內的像移量。聯合變換相關法的計算流程如圖2所示。
圖2 聯合變換相關法流程圖
2 振動矢量估計
聯合變換相關法具有很強的抗噪性能,針對低信噪比的星圖也能較為準確的估計出亞像素位移量,但其缺點是運算量大,需要對聯合星圖做兩次傅里葉變換,傳統處理器難以實時處理,因此本文采用聯合變換光學相關器JTOC(Joint Transform Optical Correlator)進行相關運算,其處理速度極快且功耗低[8]。圖3是JTOC的原理圖,其工作前提條件是增加1個與星敏感器CCD相機(本文特指低幀速相機)剛體連接的輔助高幀速CCD相機,二者同時成像時,由于高幀速相機曝光時間特別短,認為其獲得的連續星圖序列幀是清晰的,不存在模糊現象,而低幀速相機由于其曝光時間較長,獲得的是一幅振動模糊星圖。因為2個CCD相機是剛體連接,所以二者振動路徑是一致的,而高幀速相機振動路徑的可以從其拍攝到的序列幀中提取。JTOC具體工作過程2.1節會進行詳細闡述。
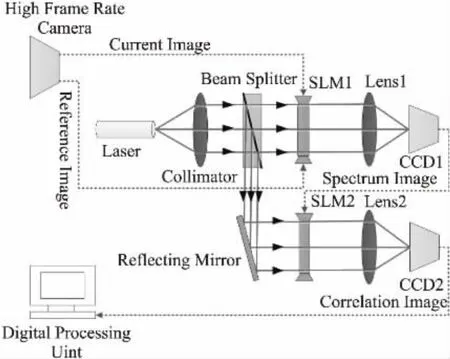
圖3 聯合變換光學相關器原理圖
2.1 線振動矢量估計
線振動引起的星圖模糊屬于空間不變模糊,此時星圖中所有像素點具有相同的振動軌跡。線振動矢量測量裝置為聯合變換相關器,如圖3所示,具體步驟如下:
①在一個低幀速CCD相機曝光時間內,由另一個與其剛體連接的高幀速CCD相機捕獲相鄰的序列星圖fi(x+a,y)和fi+1(x-a+Δx,y+Δy),并排輸入到空間光調制器 SLM1中作為聯合輸入星圖j(x,y)。不妨假設fi(x+a,y)為參考星圖r(x,y),下一幀星圖fi+1(x-a+Δx,y+Δy)為目標星圖t(x,y);
②用準直的激光Laser照射SLM1上的聯合星圖j(x,y),由于聯合星圖在傅里葉透鏡Lens1的前焦平面上,在Lens1的后焦平面產生聯合功率譜JPS (Joint Power Spectrum)星圖,在CCD1上成像;
③讀取CCD1上獲取的聯合星圖功率譜至空間光調制器SLM2中,在此經過反射鏡反射過來的激光進行調制,由傅里葉透鏡Lens2再次變換后,在CCD2中成像,得到相關峰輸出星圖;
④根據獲得的相關峰輸出星圖,利用質心搜索算法,得到互相關峰的真實坐標,即當前幀與下一幀的相對位移Δpipi+1(x,y),其表達式如下:

式中:pi+1(x,y)和pi(x,y)表示2個互相關峰的坐標位置。
⑤不斷用目標星圖t(x,y)替換參考星圖r(x,y),重復步驟1~步驟4,可得到一系列相對星圖位移序列{Δpipi+1(x,y)},從而估算低幀速相機獲取的模糊星圖的振動路徑。
2.2 角振動矢量估計
星敏感器成像過程中,除了受線振動的影響外,還有更為復雜的角振動。角振動引起的星圖模糊,是一種空間可變模糊,它圍繞1個圓心旋轉,相對于靜態星點,不僅產生了擴散,還存在一定旋轉角度,星圖模糊程度與距該圓心的距離有關。如果直接對角振動模糊星圖運用2.1節中的方法檢測振動路徑,無疑存在較大的誤差。因此,本文通過將星圖在笛卡爾坐標下的角振動轉換成極坐標下的線振動,然后將極坐標變化后的星圖替代2.1節中的線振動的序列星圖fi(x+a,y)和fi+1(x-a+Δx,y+Δy),再使用聯合變換相關器處理,便可準確估計出星圖在極坐標下的系列位移矢量,根據坐標間轉換關系,進而得到星圖在笛卡爾坐標系下的旋轉角度。下面具體推導笛卡爾坐標系與極坐標系的轉換關系。
假設笛卡爾坐標系下的像素坐標為(x,y)表示,則極坐標變換可以表示為:
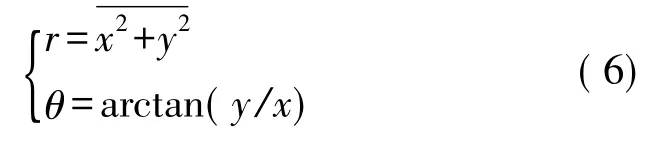
式中:r表示笛卡爾坐標系下矢量點對應的幅值,θ表示該矢量對應的幅角,取逆時針為正方向。
對式(6)進行逆變換得:

在笛卡爾坐標系下,用函數g1(x,y)表示CCD相機成像星圖平面,將該星圖平面逆時針旋轉 φ度,得到平面g2(x,y),g2(x,y)可表示為:

星圖g1(x,y)和g2(x,y)經過極坐標變換后的星圖分別用p1(r,θ)和p2(r,θ)表示,則有:
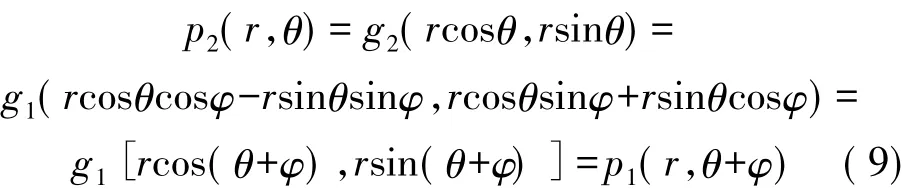
從式(9)可以知道,笛卡爾坐標系下星圖平面的角振動轉換成極坐標系下該星圖在θ方向的線振動,并且二者的振動矢量存在對應關系。
根據上述分析,無論是線振動還是較為復雜的角振動,都可以通過聯合變換相關器得到對應的振動矢量,這也為下一步振動星圖的PSF估計奠定了基礎。
3 PSF估計
利用聯合變換相關法,可以得到高幀速CCD相機各相鄰星圖幀間的偏移量,這些偏移量是一系列離散值。相機的振動路徑是連續的,相應的點擴散函數PSF也應該是連續的。因此,需要施加一些PSF滿足的先驗約束條件,通過約束實現離散的偏移量到連續的PSF之間的轉變。PSF是一個能量分布函數,并與相機振動路徑相關,不妨假設PSF是路徑r(t)和能量e(t)的函數,其約束條件為:
①PSF函數h(x,y)滿足能量守恒,則有:

②相機振動路徑是速度r'(t)和加速度r″(t)關于時間的函數,因此r(t)至少是一個t的二次函數。假設在低幀速CCD采集時間T內,場景輻射能量不變,則有約束條件:

從式(11)得出,在任意一段時間間隔 Δt內,CCD相機的能量累積和該段時間間隔長度成正比關系。
基于式(10)、式(11),振動PSF的估計過程如圖4所示。圖4(a)的各個離散點表示每一幀星圖相對于第1幀的絕對偏移量,即離散的振動矢量;圖4(b)中取離散點前后兩段曲線段的中點之間的曲線段作為對應幀星圖的路徑,即對振動路徑r(t)上的離散點進行二次拋物插值,滿足運動路徑關于時間的二階可導;圖4(c)中由于等間隔曝光時間內,根據能量相等約束,故各矩形的面積是相等的,其高度與寬度成反比,而高度表示PSF值大小,因此便得到離散點對應的PSF中;圖4(d)對PSF值進行歸一化處理,使其滿足式(10)約束條件,并進行插值擬合得到連續的PSF。
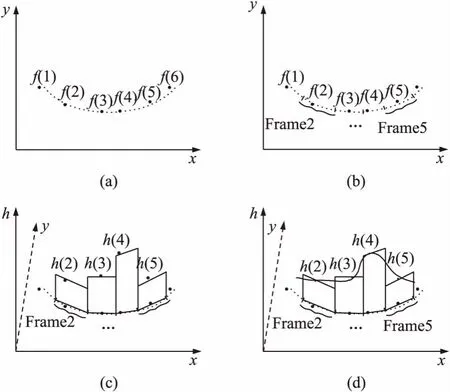
圖4 PSF估計過程
4 仿真驗證
為了驗證本文聯合變化相關法的有效性,首先設置星敏感器的參數,參見表1。
表1 星敏感器工作參數
根據參數可仿真得到參與實驗的標準星圖,其尺寸大小為512 pixel×512 pixel,如圖5所示;其次設置高、低幀速相機的幀速比18∶1,高幀速相機拍攝得到的序列星圖尺寸大小均為256×256,拼接完成的聯合輸入圖像尺寸大小為1 024 pixel×1 024 pixel;最后對模糊星圖進行復原,選用方法為RL算法[9],并采用峰值信噪比[10]PSNR(Peak Signal-to-Noise Ratio)作為星圖復原結果的客觀評價標準。
圖5 標準星圖
4.1 線振動條件下仿真分析
對圖(5)中的標準星圖施加大小為10個像素,方向為水平方向的線振動位移量,模糊星圖如圖6所示。由高幀速相機拍攝獲得的連續平移星圖序列如圖7所示,將相鄰幀星圖拼接成聯合輸入星圖,得到圖8,根據聯合變換相關器的工作過程,則聯合輸入星圖的相關峰輸出如圖9所示。
圖6 模糊星圖
圖7 連續平移星圖序列
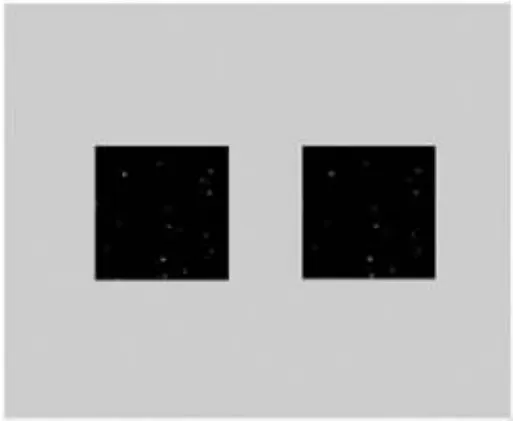
圖8 聯合輸入星圖
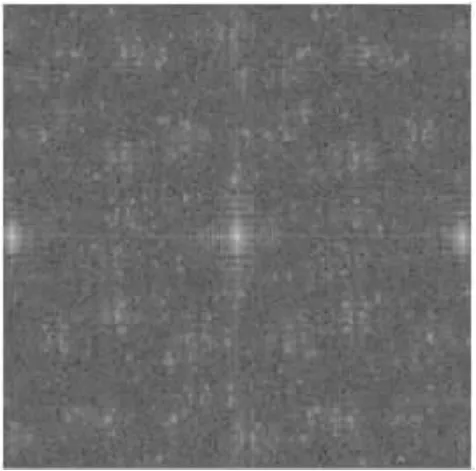
圖9 相關峰輸出
由圖9可知,互相關峰并不是一個獨立亮點,因此需要在其整數像素位置周圍取M×N的鄰域,本文選10×10的鄰域,然后利用質心搜索算法,得到互相關峰的真實坐標,進而通過式(5)可得到一系列離散的位移序列,插值處理后便估計出了模糊星圖的連續PSF。根據得到的PSF,利用RL算法反卷積后得到復原星圖(圖10)。
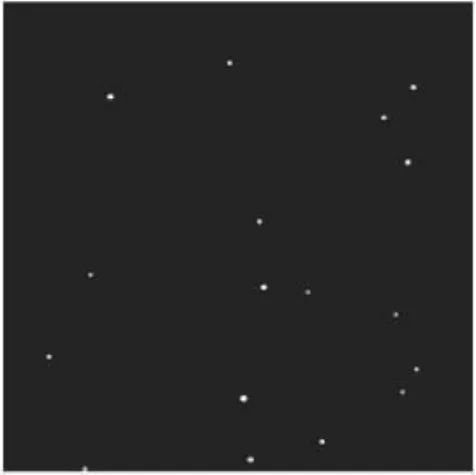
圖10 RL復原星圖
由圖6和圖10可以直觀看出復原效果很明顯,并且,相對于模糊星圖,復原后的星圖PSNR提高26.50%,這說明利用聯合變換相關法估計的線振動條件下的PSF較準確。
4.2 角振動條件下仿真分析
仍然以圖4中的標準星圖作為原始星圖,對其施加角度為0.04 rad的角振動位移量,模糊星圖如圖11所示。角振動條件下的仿真分析類似于4.1節,不同之處在于要將高幀速相機拍攝的星圖經過坐標轉換得到極坐標系下的星圖,然后用轉換后的星圖序列拼接成聯合輸入星圖進行后續的仿真實驗。由于本文篇幅有限,因此只給出模糊星圖、笛卡爾坐標系下的連續平移星圖序列、極坐標系下的連續平移星圖序列以及RL復原后的星圖,分別如圖11~圖14所示。
圖11 模糊星圖
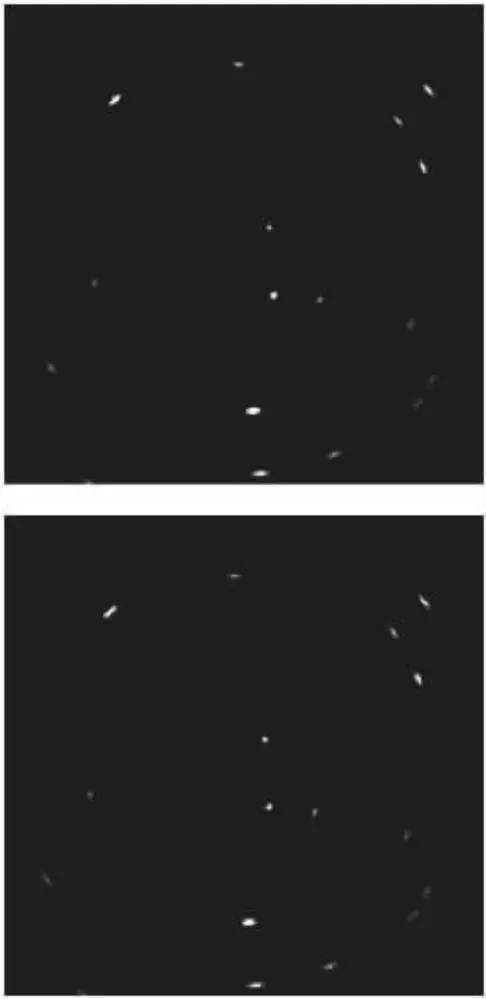
圖12 笛卡爾坐標系下的連續平移
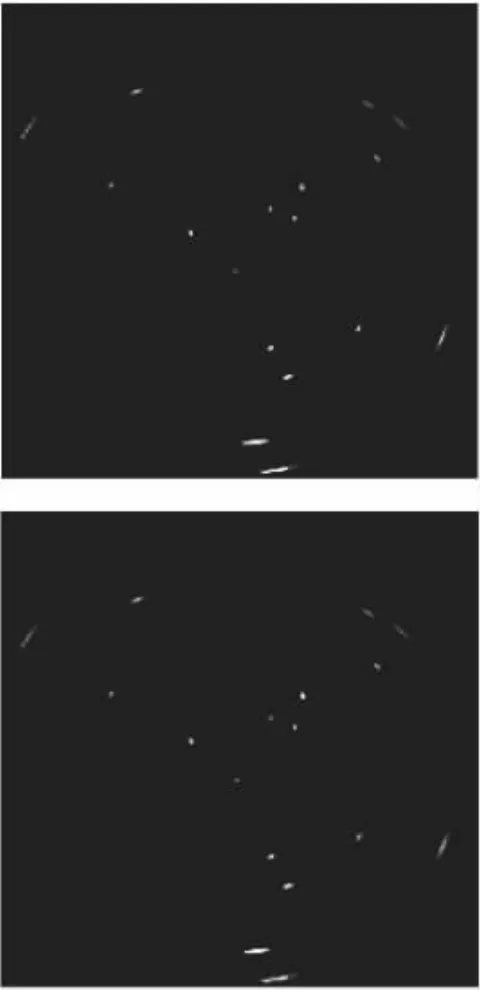
圖13 極坐標系下的連續平移
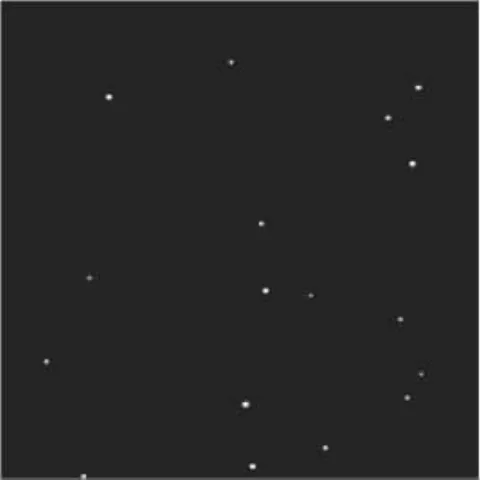
圖14 RL復原星圖
由圖11和圖14可以直觀看出復原效果很明顯,并且,相對于模糊星圖,復原后的星圖PSNR提高33.60%,說明利用聯合變換相關法同樣可以較準確的估計角振動條件下的PSF。
5 結束語
本文針對彈體振動引起的星圖成像質量退化的問題,提出了一種基于聯合變換相關的PSF估計方法。通過引入聯合變換光學相關器和坐標變換對聯合輸入星圖進行相關運算,將得到的一系列相對位移矢量插值處理后估計出模糊星圖的連續PSF,并分別在線振動和角振動條件下,對算法有效性進行了仿真驗證。聯合變換相關法不僅有效克服了僅從單幅模糊星圖估計PSF存在的多解問題,還較準確地估計出了由角振動引起的空間變化模糊星圖的PSF。
[1] 孫高飛,張國玉,劉石,等.高精度背景可控星圖模擬器設計[J].紅外與激光工程,2015,44(7):2196-2199.
[2] 鄧長智,王宏力,陸敬輝,等.低頻振動對星敏感器成像影響分析[J].傳感器與微系統,2014,34(1):43-46.
[3] 黃博.臨近空間高動態星圖仿真技術研究[D].武漢:華中科技大學,2012.
[4] 韓禮,張力軍,蔡洪,等.基于維納濾波的運動模糊星圖復原仿真分析[J].光學技術,2014,40(4):316-320.
[5] 吳小娟,王新龍.星圖運動模糊及其復原方法[J].北京航天航空大學學報,2011,37(11):1338-1342.
[6] 徐滬萍,付文興,馬杰.一種遙感圖像振動模糊復原方法[J].華中科技大學學報,2014,42(3):28-32.
[7] 許博謙.星載相機微振動下圖像補償技術研究[D].長春:中國科學院長春光學精密機械與物理研究所,2015.
[8] 易紅偉,趙惠,汶德勝,等.聯合變換相關器像移測量靜態仿真實驗分析[J].光學學報,2010,30(12):3471-3475.
[9] Qiao S,Wang Q,Sun J N,et al.A New Method by Steering Kernel-Based Richardson-Lucy Algorithm for Neutron Imaging Restoration[J].Nuclear Instruments and Methods in Physics Research Section A:Accelerators,Spectrometers,Detectors and Associate Equipment,2014,735:541-545.
[10]王輝,吳欽章.基于圖像質量評價的自動圖像復原技術[J].傳感技術學報,2012,25(7):930-935.

張 濤(1992-),男,江西上饒人,碩士研究生,主要從事星敏感器測量精度研究;

王宏力(1965-),男,陜西鳳翔人,教授,博士,主要研究方向為導航制導與控制、復合制導、天文/慣性導航、故障診斷及可靠性評估,775128700@qq.com。
PSF Evaluation Method Based on Joint Transform Correlation*
ZHANG Tao,WANG Hongli*,LU Jinghui,JIANG Wei
(Department of Control Engineering,Rocket Force University of Engineering,Xi’an 710025,China)
Point Spread Function(PSF)estimation,a method based on joint transform correlation,is put forward to resolve the quality deterioration of the star image imaging resulted from the vibration of missile body.Firstly,within the exposure time of low frame rate CCD camera,a high frame rate CCD camera is used to obtain a continuously translational star image sequence under the condition of vibration;then the consecutive frames of the star image sequence are spliced into a joint input star image.Secondly,joint transform optical correlator is introduced into coordinate transformation as the processor to obtain the relative displacement vector of joint input star image;then interpolation processing is conducted and the consecutive PSF of the fuzzy star image is estimated out.Finally,simulation verification is completed.Results of simulation verification indicate that joint transform correlation method not only effectively overcomes the shortcomings of single fuzzy star image,but also accurately estimates out the PSF of fuzzy star image of spatial transform resulted from angle vibration.
image processing;PSF evaluation;joint transform correlator;vibration
V271.4
A
1004-1699(2017)02-060-06
C:6140;6135
10.3969/j.issn.1004-1699.2017.02.016
項目來源:陜西省科學技術研究發展基金項目(2014JM2-6107)
2016-04-07 修改日期:2016-07-26
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
大電機技術(2022年5期)2022-11-17 08:12:48
天天愛科學(2020年6期)2020-09-10 07:22:44
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
數學物理學報(2018年4期)2018-09-14 03:40:58
數學物理學報(2017年6期)2018-01-22 02:26:40
船海工程(2015年4期)2016-01-05 15:53:26
噪聲與振動控制(2015年4期)2015-01-01 07:08:44
計算物理(2014年2期)2014-03-11 17:01:44
鄭州大學學報(理學版)(2014年3期)2014-03-01 04:21:00