系泊系統的設計
2017-03-24 11:22:02謝佳桃劉欣怡彭裕軫
卷宗 2016年11期
謝佳桃+劉欣怡+彭裕軫

摘 要:系泊系統的設計主要在于確定錨鏈的形狀以及浮標的吃水深度,錨鏈有三種狀態:1、全部離開海地面2、剛好脫離的臨界點3、存在部分趟底鏈。首先需要對錨鏈狀態進行判斷,再主要運用MATLAB對各相關參數進行循環迭代,使方程結果無限逼近已知確定值,從而確定各參數。MATLAB
關鍵詞:系泊系統;懸鏈線方程;迭代法;循環;MATLAB
航運的急速發展讓系泊系統的重要性逐漸體現出來。錨的設計重量,錨鏈長度的確定,重物體積大小的設計與浮標的選定,這些都是整套系統的核心。而如何選定就成了最需要解決的問題,目前的方法各式各類,這里介紹一種十分簡潔的方式來計算現有的系泊系統正常工作時的狀態。
1 問題重述
近淺海觀測網的傳輸節點由浮標系統、系泊系統和水聲通訊系統組成(如圖1所示)。浮標直徑2m,高2m,質量1000kg。錨的質量為600kg,鋼管共4節,每節長度1m,直徑為50mm,每節鋼管的質量為10kg。鋼桶長1m,外徑30cm,質量100kg。重物球控制鋼桶的傾斜角度。
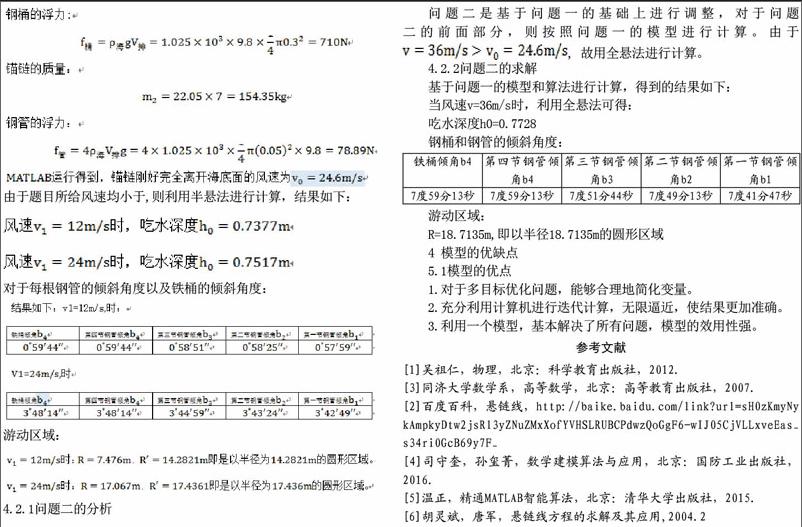
問題1 選定錨鏈22.05m,重物球質量1200kg。現將該型傳輸節點布放在水深18m、海床平坦、海水密度為1.025*103kg/m3的海域。若海水靜止,分別計算海面風速為12m/s和24m/s時鋼桶和各節鋼管的傾斜角度、錨鏈形狀、浮標的吃水深度和游動區域。
問題2 在問題1的假設下,計算海面風速為36m/s時鋼桶和各節鋼管的傾斜角度、錨鏈形狀和浮標的游動區域。
2 模型假設
1.假設重物球、錨鏈和每根鋼管的浮力忽略不計
2.假設裝置每部分不會發生形變(錨鏈不會被拉長)
3.假設浮標始終處于豎直狀態
4.假設風向一直平行于海面
5.假設水的波浪對系泊系統沒有影響
3 模型的建立與求解
4.1.1問題一的分析
對問題進行簡化,不考慮重物球和錨鏈的浮力,在錨的平衡作用下,系統將會處于平衡狀態。利用浮力公式和平衡條件方程求解各個力。從下往上依次進行受力分析,可以得出鋼桶的傾斜角θ:
對錨鏈進行分析,錨鏈形狀應為有懸錘的懸鏈線,下面對懸鏈線方程進行求解。
根據查閱文獻【6】可知,懸鏈線方程有不同表達形式,對于系泊系統的變體有:
4 模型的優缺點
5.1模型的優點
1.對于多目標優化問題,能夠合理地簡化變量。
2.充分利用計算機進行迭代計算,無限逼近,使結果更加準確。
3.利用一個模型,基本解決了所有問題,模型的效用性強。
參考文獻
[1]吳祖仁,物理,北京:科學教育出版社,2012.
[3]同濟大學數學系,高等數學,北京:高等教育出版社,2007.
[2]百度百科,懸鏈線,http://baike.baidu.com/link?url=sH0zKmyNykAmpkyDtw2jsRl3yZNuZMxXofYVHSLRUBCPdwzQoGgF6-wIJ05CjVLLxveEas_s34ri0GcB69y7F_
[4]司守奎,孫璽菁,數學建模算法與應用,北京:國防工業出版社,2016.
[5]溫正,精通MATLAB智能算法,北京:清華大學出版社,2015.
[6]胡靈斌,唐軍,懸鏈線方程的求解及其應用,2004.2
