D08—32搗固車網(wǎng)絡(luò)控制系統(tǒng)研制
2017-03-24 10:16:40翟仕樂
卷宗 2016年11期
翟仕樂


摘 要:介紹了D08-32搗固車網(wǎng)絡(luò)控制系統(tǒng)的研究背景,闡述了網(wǎng)絡(luò)系統(tǒng)的總體結(jié)構(gòu),描述了電源控制和柴油機(jī)控制原理,以及針對搗固車的搗固、起道抄平和撥道三大功能,詳細(xì)介紹了作業(yè)控制原理。D08-32搗固車網(wǎng)絡(luò)控制系統(tǒng)的成功裝車,實(shí)現(xiàn)了D08-32搗固車的控制功能,同時(shí)提高了作業(yè)效率和精度,為網(wǎng)絡(luò)控制平臺在鐵路大型養(yǎng)路機(jī)械上的推廣應(yīng)用奠定了基礎(chǔ)。
關(guān)鍵詞:搗固車;CAN總線;正矢;伺服;PWM
Abstract:This paper introduces the research background of D08-32 tamping network control system, describes the overall structure of the network system, describes the power control and diesel engine control principle, as well as tamping for the tamping, , Detailed operation control theory. D08-32 tamping network control system of the successful loading, to achieve the D08-32 tamping control functions, while improving the operational efficiency and accuracy of the network control platform for large-scale railway maintenance machinery on the promotion and application laid the foundation.
Key Words:tamping vehicle;CAN bus;versine;servo; pulse width modulation
1 引言
D08-32搗固車是目前我國應(yīng)用最廣泛的一種鐵路線路養(yǎng)護(hù)機(jī)械。該車是集機(jī)、電、液于一體的機(jī)械,采用了大量先進(jìn)技術(shù),如電液伺服控制技術(shù)、自動檢測技術(shù)、微機(jī)控制技術(shù)和激光準(zhǔn)直系統(tǒng)等。我國目前鐵路線路維修使用的搗固車電氣系統(tǒng)主要以80年代末從奧地利普拉塞公司引進(jìn)的以模擬電路為主,隨著電氣控制技術(shù)的發(fā)展,以及數(shù)字信號處理器迅速推廣應(yīng)用,新型數(shù)字化技術(shù)應(yīng)用于鐵路大型養(yǎng)路機(jī)械的電氣控制領(lǐng)域已經(jīng)成為一種必然的發(fā)展趨勢和該領(lǐng)域技術(shù)創(chuàng)新的突破口。
隨著數(shù)字信號處理器和現(xiàn)場總線的發(fā)展,應(yīng)用領(lǐng)域越來越廣,其先進(jìn)性和可靠性在工業(yè)應(yīng)用領(lǐng)域得到了充分驗(yàn)證,鐵路大型養(yǎng)路機(jī)械應(yīng)用環(huán)境非常惡劣,現(xiàn)場施工噪聲大、電磁干擾強(qiáng)、粉塵多,對電氣設(shè)備具有較大的影響。我國通過引進(jìn)國外的并進(jìn)行國產(chǎn)化的搗固車,主要以模擬電路為主,在此種特殊的環(huán)境下,可靠性有所下降,特別是在現(xiàn)場施工頻繁使用對講機(jī)的情況下,模擬信號非常容易受到干擾,經(jīng)常出現(xiàn)誤動作、作業(yè)精度差等故障現(xiàn)象。為了解決以上問題,在以數(shù)字信號處理器和現(xiàn)場總線的基礎(chǔ)研究之上,開發(fā)針對鐵路大型養(yǎng)路機(jī)械電氣控制系統(tǒng)應(yīng)用的新型數(shù)字化網(wǎng)絡(luò)控制平臺,通過該平臺研制的通用控制模塊和控制軟件,搭建鐵路大型養(yǎng)路機(jī)械網(wǎng)絡(luò)控制系統(tǒng)。網(wǎng)絡(luò)控制平臺的通用控制模塊主要由五種基本模塊組成,分別是顯示模塊(DM)、數(shù)字量輸入模塊(DI)、數(shù)字量輸出模塊(DO)、模擬量輸入模塊(AI)和電源模塊(P)。現(xiàn)場總線是近20年發(fā)展起來的新技術(shù),本文采用的是應(yīng)用最廣泛,抗干擾能力最強(qiáng)的CAN總線,該總線由德國BOSCH公司研究開發(fā),現(xiàn)已成為ISO國際標(biāo)準(zhǔn)化的串行通信協(xié)議,是目前國際上應(yīng)用最廣泛的開放式現(xiàn)場總線之一。CAN總線的應(yīng)用為分布式控制系統(tǒng)各節(jié)點(diǎn)間實(shí)時(shí)、可靠的數(shù)據(jù)通信提供了強(qiáng)大的技術(shù)支持,現(xiàn)在已經(jīng)被廣泛應(yīng)用于船舶、醫(yī)療設(shè)備、工業(yè)設(shè)備等各個(gè)方面。
本文以數(shù)字信號處理器和CAN總線為理論基礎(chǔ),以網(wǎng)絡(luò)控制平臺產(chǎn)品為網(wǎng)絡(luò)控制系統(tǒng)基本組成單元,研制并搭建了D08-32搗固車網(wǎng)絡(luò)控制系統(tǒng),以替代原來的以模擬電路為主的模擬控制系統(tǒng)。
2 總體設(shè)計(jì)
D08-32搗固車網(wǎng)絡(luò)控制系統(tǒng)采用分布式、模塊化、網(wǎng)絡(luò)化控制方式,基本控制模塊包括顯示模塊(DM模塊)、數(shù)字量輸入模塊(DI模塊)、數(shù)字量輸出模塊(DO模塊)、模擬量輸入模塊(AI模塊)和網(wǎng)關(guān)模塊(WG模塊)組成。各模塊通過CAN總線連接而成一個(gè)整體的網(wǎng)絡(luò),所有模塊的數(shù)據(jù)通過CAN總線網(wǎng)絡(luò)共享,D08-32搗固車網(wǎng)絡(luò)控制系統(tǒng)的總體結(jié)構(gòu)圖如圖1所示。
該網(wǎng)絡(luò)系統(tǒng)中的AI模塊主要采集模擬量信號,比如蓄電池電壓和電流信號、柴油發(fā)動機(jī)溫度和壓力信號、變速箱穩(wěn)定和壓力信號等;DI模塊主要采集數(shù)字量信號,比如搗固裝置鎖閉行程開關(guān)、起撥道裝置鎖閉行程開關(guān)、夯拍器工作位在軌感應(yīng)開關(guān)、發(fā)動機(jī)報(bào)警開關(guān)等開關(guān)量;DO模塊主要用于控制輸出,驅(qū)動比例閥、伺服閥和繼電器等。以上三種模塊為底層基本模塊,顯示模塊為主要的人機(jī)交互模塊,主要功能是顯示機(jī)器狀態(tài)和作業(yè)數(shù)據(jù),輸入控制模塊參數(shù),診斷模塊和系統(tǒng)的狀態(tài)。電源模塊給顯示器和底層模塊提供電源,網(wǎng)關(guān)模塊用于兩個(gè)網(wǎng)絡(luò)之間的通信。
D08-32搗固車有設(shè)計(jì)五個(gè)操作臺,分別是一號位B2操作臺和B7操作臺,2號位的B4操作臺,以及行車操作臺B5和B11操作臺。根據(jù)分布式控制原理,各控制模塊可就近安裝于執(zhí)行機(jī)構(gòu),這樣縮短控制模塊與執(zhí)行器之間的距離,亦可減少接線,縮短模擬信號的傳輸距離。搗固車作為一種復(fù)雜的線路養(yǎng)護(hù)機(jī)械,其開關(guān)量就有190路,其中包括127路數(shù)字量輸入信號和63路數(shù)子量輸出信號。還包括32路模擬量輸入信號。輸入信號統(tǒng)一使用數(shù)字量輸入模塊和模擬量輸入模塊來采集,并通過CAN總線將采集到的數(shù)據(jù)發(fā)送到其他控制模塊。根據(jù)本系統(tǒng)的信號統(tǒng)計(jì),需要用到16個(gè)DO模塊、11個(gè)DI模塊、5個(gè)AI模塊、5個(gè)電源模塊和1個(gè)網(wǎng)關(guān)模塊。
網(wǎng)絡(luò)模塊拓?fù)鋱D如圖2所示。P1~P5為電源模塊,每個(gè)電源模塊可給6個(gè)底層控制模塊供電,PD為脈沖驅(qū)動模塊,主要用于產(chǎn)生脈沖信號,在底層模塊程序自動下載過程中用于定位網(wǎng)絡(luò)模塊。J00為B4箱2號位顯示器,主要用于前端輸入和前端數(shù)據(jù)顯示。J01模塊為B11箱前司機(jī)室行車監(jiān)控顯示器,主要用于前司機(jī)室高速行車時(shí)監(jiān)控發(fā)動機(jī)、變速箱以及報(bào)警信號。J23模塊為1號位作業(yè)壓力監(jiān)控顯示器,主要顯示作業(yè)系統(tǒng)壓力。J24模塊為1號為作業(yè)控制顯示器,為整個(gè)網(wǎng)絡(luò)系統(tǒng)的主控制器,用于作業(yè)數(shù)據(jù)輸入、作業(yè)狀態(tài)監(jiān)控、模塊診斷、模塊參數(shù)設(shè)置、智能診斷和遠(yuǎn)程診斷功能。J25模塊為后司機(jī)室高速走行監(jiān)控顯示器。WG為網(wǎng)關(guān)模塊,主要是將整個(gè)CAN總線網(wǎng)絡(luò)分為兩個(gè)子網(wǎng),提高網(wǎng)絡(luò)總線數(shù)據(jù)通信效率和信號的穩(wěn)定性。
3 網(wǎng)絡(luò)電源控制
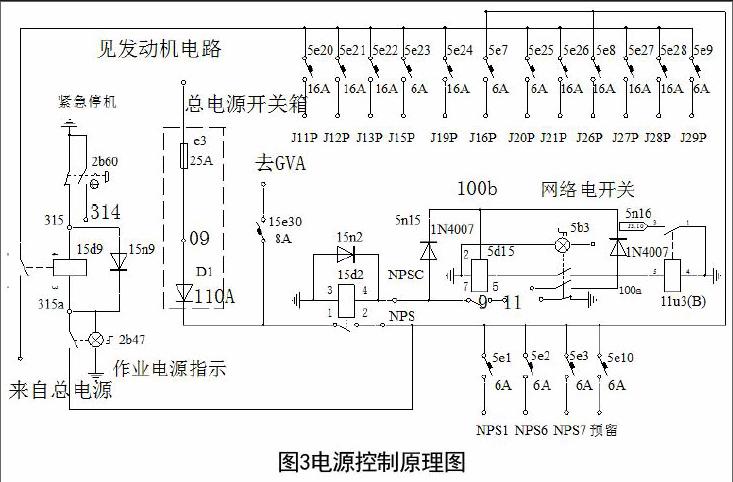
D08-32搗固車網(wǎng)絡(luò)控制系統(tǒng)電源控制主要包括網(wǎng)絡(luò)電源和作業(yè)電源兩個(gè)部分,主要從節(jié)能方面考慮,在搗固車高速運(yùn)行或非作業(yè)模式下,只需打開網(wǎng)絡(luò)電源,而無需打開作業(yè)電源,網(wǎng)絡(luò)電源控制原理如圖3所示。網(wǎng)絡(luò)電源開關(guān)5b3打開,5d15延時(shí)繼電器得電閉合,使NPSC得電,以使15d2繼電器常開觸點(diǎn)閉合,NPS得電,相應(yīng)的只需在機(jī)器閑置的情況下運(yùn)行的電源模塊以及對應(yīng)模塊的輸出電源得電。作業(yè)電源只有在網(wǎng)絡(luò)電源打開的情況下才起作用,所以網(wǎng)絡(luò)電源開關(guān)打開后,才能打開作業(yè)電源開關(guān)2b47,此時(shí)315a得電,15d9繼電器得電,從而使2號線得電,即跟作業(yè)電源開關(guān)相關(guān)的模塊及模塊輸出電源得電。
4 柴油機(jī)控制
柴油機(jī)的控制包括啟動控制、停機(jī)控制及預(yù)熱控制。D08-32搗固車網(wǎng)絡(luò)控制系統(tǒng)的柴油機(jī)控制電路如圖4所示。
啟動柴油機(jī)之前需要打開主蓄電池開關(guān)5b0,使繼電器1a1常開觸點(diǎn)閉合。柴油機(jī)啟動開關(guān)5b8和11b8,任何一個(gè)開關(guān)拉起到1位,則繼電器13Re3得電動作,預(yù)熱電阻R1和R2得電開始預(yù)熱,同時(shí),繼電器5u5/D也得電而自保持,即215得電自保持,13Re2得電,常開觸點(diǎn)閉合,使28d6繼電器得電,其常開觸點(diǎn)閉合,停機(jī)電磁閥1S6得電,需要說明的是,柴油機(jī)停機(jī)電磁閥失電停機(jī)。此時(shí)燃油回路開通。當(dāng)預(yù)熱一定時(shí)間后,信號燈5h4和11h5亮,此時(shí)預(yù)熱結(jié)束。將啟動開關(guān)5b8或11b8拉起至2位。此時(shí),1s91噴油電磁閥得電開水噴油,13Re1得電,1S592輔助啟動電磁閥得電,以及啟動馬達(dá)得電,且啟動離合器合上。于是柴油機(jī)啟動條件得到滿足而啟動起來,此時(shí)松開5b8或11b8,啟動電機(jī)失電,啟動離合器脫離,但5u5/D自保持而保持油路暢通,柴油機(jī)繼續(xù)運(yùn)轉(zhuǎn)。
柴油機(jī)停機(jī)控制,開關(guān)1b20~1b25、2b45、4b16和5b29任一被壓下閉合時(shí),繼電器5u5/D失電,13Re2失電,停機(jī)電磁閥失電停機(jī)。另外作業(yè)鎖閉信號和走行鎖閉信號加至繼電器5u6/B。這兩個(gè)信號的引入是為了確保在啟動柴油機(jī)之前不能接通作業(yè)系統(tǒng)電源、變矩器不能掛擋,以確保安全運(yùn)行。因?yàn)橐坏┳鳂I(yè)系統(tǒng)得電或變矩器掛擋,則繼電器5u6/B得電,其常閉觸點(diǎn)斷開,13Re1不能得電,導(dǎo)致啟動電機(jī)不能得電,于是不能啟動柴油機(jī)。
5 作業(yè)控制原理
5.1 搗固控制原理
D08-32搗固車的搗固裝置用于搗固鋼軌兩側(cè)的軌底道碴,提高軌底道碴的密實(shí)度,并與起撥道裝置相配合,消除軌道的高低不平,增強(qiáng)軌道的穩(wěn)定性。搗固裝置是搗固車的主要工作裝置,D08-32搗固車有兩套搗固裝置,左右對稱地安裝在搗固車的中部。左右兩套搗固裝置能同步搗固兩根軌枕,也能單獨(dú)使用左右任一個(gè)搗固裝置,搗固軌枕的左右任一道床。搗固裝置除了振動夾持動作外,還能垂直升降和橫向移動。升降和橫移控制,由各自獨(dú)立的自動控制機(jī)構(gòu)來完成。
搗固控制系統(tǒng)主要包括搗固液壓系統(tǒng)、深度傳感器、搗固控制模塊、鎖閉解鎖行程開關(guān)等。液壓系統(tǒng)為搗固裝置動作提供動力,深度傳感器用于反饋搗固裝置的實(shí)際位置,搗固控制模塊接收通過顯示模塊輸入的目標(biāo)深度,目標(biāo)值和反饋值進(jìn)行比較,差值用于控制搗固比例閥的電流。D08-32搗固車搗固裝置升降控制中,給定搗固深度通過顯示模塊輸入,深度傳感器具有CAN接口,可直接將傳感器數(shù)值通過CAN總線發(fā)送到搗固控制模塊,根據(jù)給定深度和傳感器反饋深度的差值作為控制模塊搗固控制模糊PID的輸入,根據(jù)偏差和偏差變化率調(diào)節(jié)PID參數(shù)。
J11模塊控制為數(shù)字量輸出控制模塊,接收并處理搗固聯(lián)鎖信號,計(jì)算搗固頭升降電流,輸出PWM信號控制搗固頭升降,J11模塊具有CAN2接口用于接收左深度傳感器和右深度傳感器信號,顯示器將深度給定信號發(fā)發(fā)送給搗固控制模塊,用于計(jì)算搗固控制電路。B7箱鍵盤用于設(shè)置搗固作業(yè)模式。搗固控制原理圖如圖5所示。
5.2 起道控制原理
起道裝置有左、右兩套,分別作用于左、右兩股鋼軌上,對軌排進(jìn)行提起或者左、右移動,即起道、撥道作業(yè)。通過起、撥道作業(yè)來消除軌道方向和水平偏差,使線路曲線圓順,直線平直,確保行車安全。一般情況,搗固作業(yè)和起、撥道作業(yè)同步進(jìn)行。
起、撥道裝置、電液伺服閥、線路方向及水平檢測裝置、控制模塊共同組成起撥道電液位置伺服控制系統(tǒng),而起撥道裝置是該位置伺服系統(tǒng)中的執(zhí)行機(jī)構(gòu)。起、撥道裝置分為起道裝置和撥道裝置,起道油缸與車架縱梁鉸接,是單作用油缸,起道力是油缸的拉力,起、撥道裝置下降依靠自重。
當(dāng)線路方向有偏差時(shí),電液伺服閥有相應(yīng)的液壓信號輸出,撥道油缸推、拉擺架,使軌道向左或是向右移動,直到該處的線路方向偏差消除時(shí),電液伺服閥的輸出液壓信號為零,撥道油缸停止動作,則軌道移動到正確的位置。
起道控制系統(tǒng)主要由起道伺服閥、伺服閥控制模塊、起道控制模塊和抄平傳感器組成,起道控制模塊接收來自鍵盤和顯示模塊的輸入信號,以及各作業(yè)裝置、測量小車的連鎖信號,計(jì)算起道控制邏輯,并通過比較抄平傳感器和軌道參數(shù)計(jì)算機(jī)的理論值,計(jì)算總起道量,并在起道邏輯滿足的情況下,將總起道量換算為起道伺服閥驅(qū)動電流信號,從而驅(qū)動液壓伺服機(jī)構(gòu)動作,夾鉗與鋼軌剛性連接,液壓伺服系統(tǒng)通過夾鉗的提升動作使鋼軌向上移動,直到抄平傳感器的反饋值與理論值相等,差值為零,則停止起道動作,同時(shí),起道電流輸出為零。
數(shù)字量輸出模塊J10模塊用于控制起道作業(yè),其通過CAN2接收抄平傳感器和電子擺的信號,起道作業(yè)理論值由軌道參數(shù)計(jì)算機(jī)產(chǎn)生,前端輸入控制模塊J4通過CAN2接收數(shù)據(jù),并將數(shù)據(jù)發(fā)送到CAN1網(wǎng)絡(luò),J10模塊介紹軌道參數(shù)計(jì)算機(jī)的數(shù)據(jù),將計(jì)算出來的總起道量換算為PWM信號,通過通道輸出給伺服閥控制模塊,由該模塊將PWM信號轉(zhuǎn)換為起道電流,從而控制液壓伺服機(jī)構(gòu),起道電流通過J18模擬量輸入模塊采集,并發(fā)送給顯示器顯示,鍵盤用于起道作業(yè)模式選擇。如圖6所示為起道控制原理圖。
5.3 撥道控制原理
撥道控制系統(tǒng)由撥道伺服閥、伺服閥控制模塊、撥道控制模塊和正矢傳感器構(gòu)成,撥道控制模塊接收來自鍵盤和顯示模塊的輸入信號,以及各作業(yè)裝置、測量小車的連鎖信號,計(jì)算撥道控制邏輯,并通過比較正矢傳感器和軌道參數(shù)計(jì)算機(jī)的理論值,計(jì)算總撥道量,并在撥道邏輯滿足的情況下,將撥道量換算為撥道伺服驅(qū)動電流信號,從而驅(qū)動液壓伺服機(jī)構(gòu)動作,夾鉗帶動鋼軌向左或向右移動,直到撥道量抵消為零,則停止撥道動作,與此同時(shí),撥道電流輸出為零。
數(shù)字量輸出模塊J13用于控制撥道作業(yè),撥道基本原理與起道類似,J13模塊CAN2接收撥道正矢傳感器的數(shù)據(jù),同樣通過前端輸入控制模塊接收軌道參數(shù)計(jì)算機(jī)產(chǎn)生的理論撥道值,J13模塊計(jì)算理論值與實(shí)際值的差值作為總撥道量,并將其轉(zhuǎn)換為PWM信號,J13模塊對應(yīng)通道將信號發(fā)送到伺服閥模塊,由其將PWM信號轉(zhuǎn)換為電流信號控制液壓伺機(jī)構(gòu),同時(shí),由J18模塊采集撥道伺服電流,并發(fā)送給顯示器顯示,鍵盤則用于撥道模式選擇。如圖7所示為撥道控制原理圖。
6 結(jié)語
D08-32搗固車網(wǎng)絡(luò)控制系統(tǒng)實(shí)現(xiàn)了搗固、起道、撥道和邏輯連鎖等作業(yè)控制功能,在國內(nèi)首次在大型養(yǎng)路機(jī)械電氣控制系統(tǒng)上實(shí)現(xiàn)了數(shù)字化、網(wǎng)絡(luò)化和分布式控制,填補(bǔ)了大型養(yǎng)路機(jī)械數(shù)字化系統(tǒng)的空白,滿足用戶對大型養(yǎng)路機(jī)械電氣控制系統(tǒng)簡潔性、維護(hù)性、人性化、抗干擾能力強(qiáng)等要求。目前,D08-32搗固車網(wǎng)絡(luò)控制系統(tǒng)已經(jīng)實(shí)現(xiàn)了批量裝車,現(xiàn)場運(yùn)行穩(wěn)定可靠,獲得了用戶高度的認(rèn)可。
參考文獻(xiàn)
[1]韓志青,唐定全. 抄平起撥道搗固車[M]. 北京:中國鐵道出版社,2006:1-2.
[2]余啟明. 08-32搗固車搗固裝置產(chǎn)生動作沖擊與不同步的原因分析及消除方法[J]. 機(jī)車電傳動,1992(2):28-29.
[3]吳慶立,李懿. 模糊PID在搗固裝置控制系統(tǒng)中的應(yīng)用研究[J]. 機(jī)車電傳動,2015(3):59-60.
[4]呂陽. KZ4A型機(jī)車用傳動控制單元改進(jìn)型故障存儲裝置[J]. 機(jī)車電傳動,2015(3):53-55.
[5]蘇奎峰,呂強(qiáng). TMS320X281XDSP原理及C程序開發(fā)[M]. 北京:中國航空航天大學(xué)出版社,2008.
