基于無跡卡爾曼濾波器的雷達測距算法研究
2017-03-06 21:05:59熊奎允胡曉陽
軟件導刊 2017年1期
熊奎允+胡曉陽


摘要摘要:廣義卡爾曼濾波(EKF)在進行數據處理時,僅對測距系統和量測方程作泰勒級數展開且僅保留線性項,因而EKF只適用于弱非線性對象的估計,被處理對象的非線性越強,引起的估計誤差就越大,甚至會引起濾波發(fā)散。將無跡卡爾曼濾波(UKF)應用于非線性系統的目標處理。通過UKF在雷達測距中的應用和仿真結果分析表明,與EKF相比,UKF收斂快、對噪聲適應能力更強且算法實現更簡單。自適應無跡卡爾曼濾波(AUKF)可以對系統模型進行實時估計,通過分析知道無跡卡爾曼濾波算法滿足實時性跟蹤要求,實現了對運動目標的快速跟蹤。
關鍵詞關鍵詞:廣義卡爾曼濾波(EKF);無跡卡爾曼濾波(UKF);自適應卡爾曼濾波(AUKF);雷達測距;目標跟蹤
DOIDOI:10.11907/rjdk.162252
中圖分類號:TP312文獻標識碼:A文章編號文章編號:16727800(2017)001003203
引言
近年來,非線性濾波問題備受關注,其在目標跟蹤、定位以及參數估計[13]等方面都有廣泛應用。對于線性高斯模型而言,卡爾曼濾波是被公認的最優(yōu)濾波,其通過遞推更新有限維統計量來精確計算后驗分布。對目標下落速度與距離地面高度的測量,實質上是對目標物體的一種跟蹤,這種跟蹤易受到地物回波、測量噪聲等各種各樣隨機噪聲的干擾[4]。因此,在采集到數據后,有必要對其進行濾波平滑處理,以進一步提高系統精度。
雷達跟蹤濾波其實就是在對提取的目標信息進行估計和預測的基礎上,建立目標的運動軌跡,分析目標的運動狀態(tài)、機動效果等。當機動目標模型建立后,就要針對目標進行算法設計。雷達跟蹤需要處理的信息種類多種多樣,除了目標的位置信息外,還要對目標的移動速度進行估計。雷達跟蹤的收斂速度、濾波精度等是需要考慮的問題。在民用領域中由于考慮到雷達的成本問題,對目標的跟蹤進行快收斂性、高精度和高穩(wěn)定性的改良受到成本的制約,因此可以通過研究雷達的跟蹤算法來達到目的。通過對目標的運動過程進行建模和分析,同時將傳感器采集到的信息作為觀測量,進而利用適當的濾波估計算法實現對目標參數或運動狀態(tài)的估計。本文通過對傳統的UKF算法與自適應卡爾曼濾波算法(AUKF)進行對比,分析得出結論。UKF卡爾曼濾波方法是采用采樣策略逼近非線性分布的方法。UKF方法采樣的粒子點的個數很少,但具體個數根據所選擇的采樣策略而定。UKF方法的計算量與EKF濾波算法相當,但性能優(yōu)于EKF濾波。而AUKF濾波算法是一種循環(huán)的迭代算法,可以實時估計系統的狀態(tài)模型。
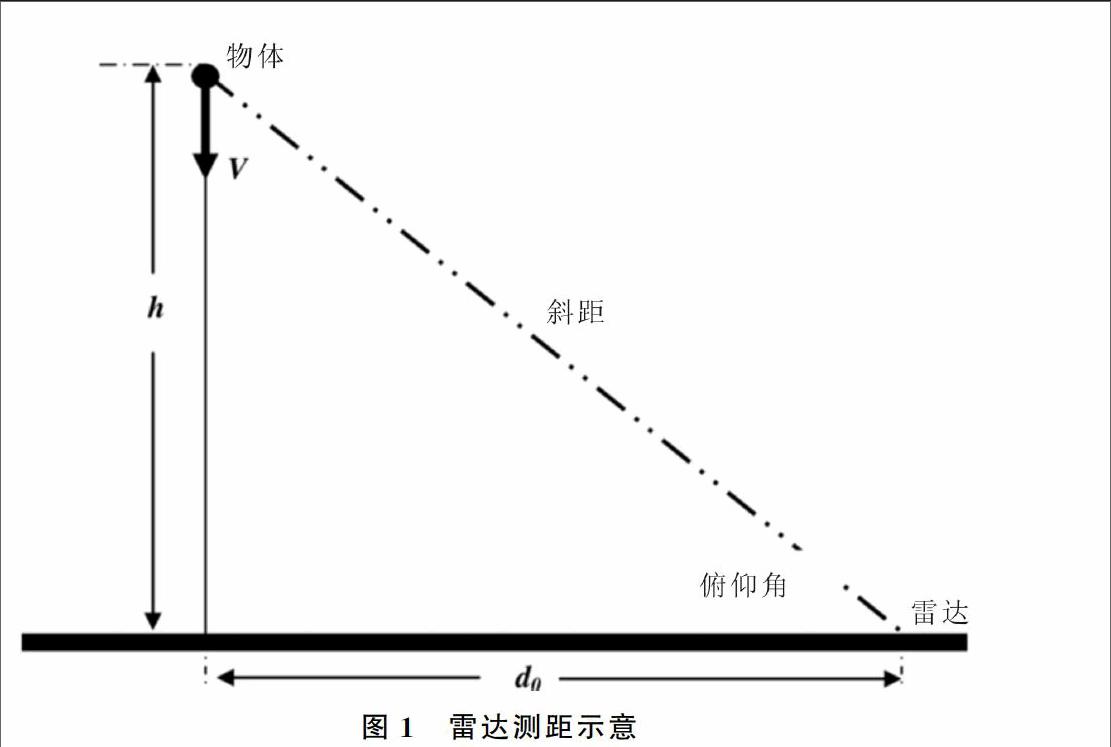
1雷達測距系統狀態(tài)方程與量測方程
1.1狀態(tài)方程
3仿真分析
仿真參數:記物體距離地面的高度為1 950m,物體初始速度為5m/s,重力加速度為10m/s2,P0=[300,1950,0,-5,-10,0]T,且雷達測距和角測的量測噪聲是高斯白噪聲隨機序列,均值為0,方差陣為R=0.050
00.02,觀測次數N=30。則生成的運動軌跡如圖2所示,跟蹤位置誤差如圖3所示,速度位置誤差如圖4所示,加速度位置誤差如圖5所示。
由圖2可以看出實際值與測量值之間的偏差比較大,經過UKF濾波后的軌跡與實際值的偏差較小。所以采用無跡卡爾曼濾波算法能夠更好地反映雷達測距的軌跡。通過圖4與圖5的對比可以看出,采用AUKF算法的位置跟蹤誤差在絕大部分時刻要大于采用標準UKF算法的位置跟蹤誤差。由此可以得出此系統的模型沒有很好的自適應性。由圖6可以看出,采用UKF濾波后的絕對值偏差比采用EKF濾波的絕對值偏差要小,這表明在狀態(tài)估計的準確性上UKF優(yōu)于EKF。因此UKF比EKF有更高的濾波精度。UKF算法有效地克服了擴展卡爾曼濾波的估計精度低、穩(wěn)定性差的缺陷。
參考文獻:
[1]F DAUM.Nonlinear filters beyond the Kalman filter[J].IEEE A&E Systems Magazine,2005,20(8):5769.
[2]李旦,秦永元,梅春波.組合導航自適應卡爾曼濾波改進算法研究[J].測控技術學報,2011,30(3):114116.
[3]戴路,金光,陳濤.自適應擴展卡爾曼濾波在衛(wèi)星姿態(tài)確定系統中的應用[J].吉林大學學報,2008,38(2):467470.
[4]謝宜生.基于微波雷達的高速公路測距測速系統研究[D].杭州:浙江大學,2011.
[5]LEFFERS EJ,MARKLEY F L,SHUSTER M D.Kalman filtering for spacecraft attitude estimation[J].Journal of Guidance, Control and Dynamics,1982,5(5):417428.
[6]S J JULIER,J K UHLMANN.Unscented filtering and nonlinear estimation[J].Proceedings of the IEEE,2004,92(3): 401422.
[7]段方,劉建業(yè),李榮冰.基于平淡卡爾曼濾波器的微小衛(wèi)星姿態(tài)確定算法[J]. 上海交通大學學報,2005,11(39):18991903.
[8]秦永元,張洪鉞,汪叔華.卡爾曼濾波與組合導航原理[M].西安:西北工業(yè)大學出版社,2014.
[9]魏克新,陳峭巖.基于自適應無跡卡爾曼濾波算法的鋰離子動力電池狀態(tài)估計[J].中國電機工程學報,2014,34(3):445452.
猜你喜歡
工業(yè)設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
測控技術(2018年12期)2018-11-25 09:37:34
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
家庭影院技術(2017年9期)2017-09-26 03:41:45
電源技術(2016年9期)2016-02-27 09:05:39
電源技術(2015年1期)2015-08-22 11:16:28