PID調(diào)節(jié)規(guī)律的教學(xué)探討
2017-03-04 11:33:34蔣開明楊小峰李琳琳黃洪全
教育教學(xué)論壇 2017年8期
蔣開明+楊小峰+李琳琳+黃洪全
摘要:在《計算機控制技術(shù)》課程中,PID調(diào)節(jié)規(guī)律難學(xué)難懂。本文通過對教學(xué)、實驗環(huán)節(jié)分析,討論了如何提高PID教學(xué)質(zhì)量的針對性的方案和建議,通過對教學(xué)聯(lián)動、MATLAB在PID教學(xué)中的應(yīng)用,來促進(jìn)學(xué)生對PID規(guī)律的認(rèn)識和深化,提高課程的教學(xué)質(zhì)量。
關(guān)鍵詞:計算機控制技術(shù);PID;教學(xué)聯(lián)動;MATLAB
中圖分類號:G642.4 文獻(xiàn)標(biāo)志碼:A 文章編號:1674-9324(2017)08-0193-02
《計算機控制技術(shù)》課程是電氣工程及其自動化專業(yè)非常重要的專業(yè)課之一[1],其中有關(guān)PID的內(nèi)容占據(jù)相當(dāng)多的篇幅,同時PID規(guī)律在控制系統(tǒng)中的地位不可撼動。在計算機控制系統(tǒng)的設(shè)計中,PID規(guī)律屬于控制策略,與硬件、軟件設(shè)計處于同等地位,三者缺一不可。學(xué)生以前對此接觸較少,課程也只能從理論上予以推導(dǎo),即便在課程中反復(fù)強調(diào)和演算,學(xué)生也不明就理,普遍反映PID內(nèi)容比較難學(xué)[2]。也有部分同學(xué)反映感覺思想有認(rèn)識,但不明白怎么去使用,具體表現(xiàn)在要求學(xué)生設(shè)計實現(xiàn)閉環(huán)控制系統(tǒng),即把PID規(guī)律與控制系統(tǒng)相結(jié)合的時候,部分同學(xué)卻選擇性遺忘PID規(guī)律。最終影響到學(xué)生的學(xué)習(xí)積極性和主動性。
一、教學(xué)內(nèi)容現(xiàn)狀
《計算機控制技術(shù)》在理論教學(xué)安排中,PID算法有4學(xué)時,從理論學(xué)習(xí)的角度沒有問題。那么是什么原因造成的結(jié)果?通過我們的調(diào)查和分析,認(rèn)為有如下方面的原因。
1.對閉環(huán)控制系統(tǒng)的認(rèn)識不足。在計算機閉環(huán)控制系統(tǒng)中,如何實現(xiàn)系統(tǒng)的快速性、穩(wěn)定性、準(zhǔn)確性,使之滿足設(shè)計要求。部分同學(xué)關(guān)注的重點放在硬件本身的快速性和硬件連接的完整性上,比如芯片的運算速度、采樣速度和接口地址等,卻忽略了重要的調(diào)節(jié)速度和要求,反映出學(xué)生對PID控制規(guī)律認(rèn)識仍然比較薄弱。
2.對PID控制本身的認(rèn)識欠缺。在計算機控制系統(tǒng)中,PID規(guī)律是以離散化的數(shù)學(xué)模型,通過編制程序在控制系統(tǒng)中實現(xiàn)的。PID控制中P調(diào)節(jié)反映比例控制系統(tǒng)的響應(yīng)快速性,快速作用于輸出;I調(diào)節(jié)反映積分控制系統(tǒng)的準(zhǔn)確性,消除過去的累積誤差;D調(diào)節(jié)反映微分控制系統(tǒng)的穩(wěn)定性。學(xué)生在面對PID具體對象時怎么實現(xiàn)P、I、D協(xié)調(diào)工作,沒有直觀的印象和概念。
二、教學(xué)探討
針對以上在學(xué)生在學(xué)習(xí)PID中出現(xiàn)的問題,我們組織相關(guān)教師進(jìn)行探討,按照現(xiàn)有的條件和教學(xué)要求。提出了如下的教改方案:(1)實行相關(guān)教學(xué)內(nèi)容的聯(lián)動機制;(2)增加MATLAB在PID教學(xué)中的比重。
1.PID調(diào)節(jié)規(guī)律的教學(xué)聯(lián)動。在電氣工程及其自動化專業(yè)涉及PID內(nèi)容的有三門課程,《自動控制原理》、《計算機過程控制》、《計算機控制技術(shù)》,我們結(jié)合各自課程的特點[3],強調(diào)在學(xué)習(xí)PID時要解決如下問題:①PID調(diào)節(jié)在控制系統(tǒng)中不要行不行,從根源上讓學(xué)生重視;②結(jié)合各自課程的特點,在實驗環(huán)節(jié)把PID調(diào)節(jié)規(guī)律作為必做實驗之一。如圖1所示為計算機過程控制實驗中,串級控制實驗中PID的調(diào)節(jié)曲線。
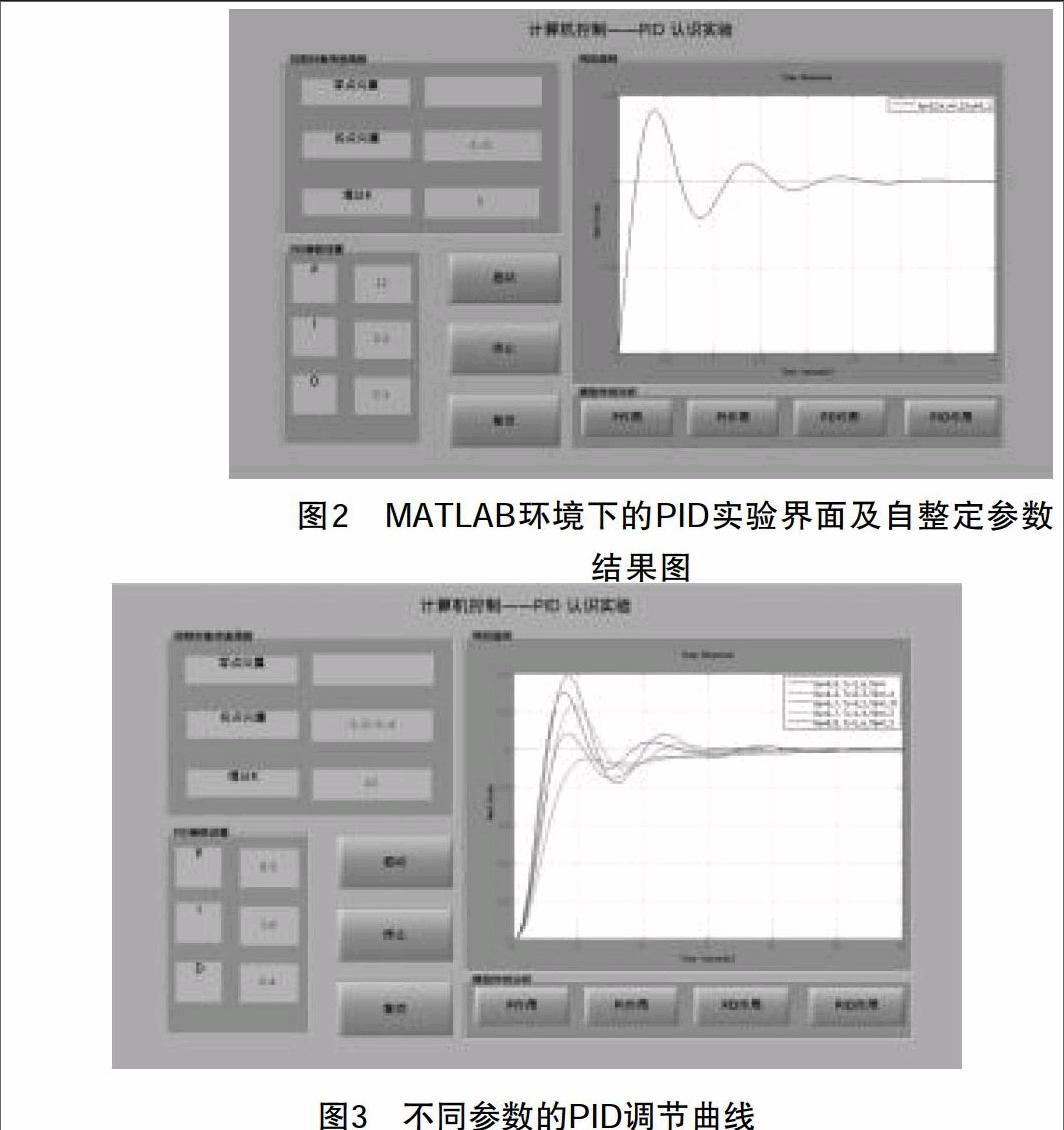
2.MATLAB在PID教學(xué)中的應(yīng)用。MATLAB在所涉課程中都可以讓學(xué)生深入學(xué)習(xí),我們按照教學(xué)要求,把MATLAB在《計算機控制技術(shù)》中逐漸引入[4,5],為了讓學(xué)生熟練掌握和理解PID控制規(guī)律。我們在設(shè)計了如圖2的實驗運行人機界面。畫面左邊為學(xué)生自己可以調(diào)整控制對象的模型、也可以調(diào)節(jié)P、I、D各自的參數(shù),研究在單位階躍作用下的控制效果,右下部為典型PID作用分析功能鍵,右上部為輸出結(jié)果。圖2輸出曲線為控制對象的傳遞函數(shù)為G(s)=,選擇P=12,I=0.2,D=0.1的作用效果[5]。
在典型作用環(huán)節(jié),共有P調(diào)節(jié)、PI調(diào)節(jié)、PD調(diào)節(jié)、PID調(diào)節(jié)功能按鍵,圖3為控制對象的傳遞函數(shù)為G(s)=,單位階躍作用下,典型的PID調(diào)節(jié)曲線。
對于圖3的PID調(diào)節(jié),系統(tǒng)偏差比PD調(diào)節(jié)稍差,但由于積分作用,使得系統(tǒng)沒有了余差同時系統(tǒng)的振蕩周期變長了。綜合來看,PID同時作用的時候控制效果最佳。
三、結(jié)語
文針對學(xué)生在學(xué)習(xí)《計算機控制技術(shù)》中PID控制規(guī)律在設(shè)計、教學(xué)中出現(xiàn)的問題,提出了相關(guān)的解決方法和措施。實踐證明,學(xué)生形成了一種不自覺的反應(yīng),只要有閉環(huán)系統(tǒng)就有PID。得益于課堂的PID控制理論分析與各門課程的教學(xué)聯(lián)動,以及Matlab驗證PID控制律的實驗教學(xué)環(huán)節(jié),使得學(xué)生能夠更加深入地理解PID控制規(guī)律。
參考文獻(xiàn):
[1]范立南.計算機控制技術(shù)[M].機械工業(yè)出版社,2009.
[2]余雷,張茂青,費樹岷.“計算機控制技術(shù)”課程PID控制部分的教學(xué)[J].電氣電子教學(xué)學(xué)報,2012,34(2):104-106.
[3]程艷云.“計算機控制系統(tǒng)”課程建設(shè)探索[J].中國電力教育,2013,(32):103-104.
[4]蘇旭武,張錚,張道德,等.MATLAB軟件在“計算機控制系統(tǒng)”CAI課件中的應(yīng)用[J].南京:電氣電子教學(xué)學(xué)報,2005,27(3):100-102.
[5]張志涌.精通Matlab R2011a[M].北京航空航天大學(xué)出版社,2011.
