基于Matlab的過程控制系統(tǒng)仿真實驗設(shè)計
2017-03-02 11:48:17陳國達李孝祿
實驗技術(shù)與管理 2017年2期
王 茜, 陳國達, 李孝祿
(1. 杭州電子科技大學(xué) 自動化學(xué)院, 浙江 杭州 310018;2. 浙江工業(yè)大學(xué) 機械工程學(xué)院,浙江 杭州 310032; 3. 中國計量大學(xué) 機電工程學(xué)院, 浙江 杭州 310018)
基于Matlab的過程控制系統(tǒng)仿真實驗設(shè)計
王 茜1, 陳國達2, 李孝祿3
(1. 杭州電子科技大學(xué) 自動化學(xué)院, 浙江 杭州 310018;2. 浙江工業(yè)大學(xué) 機械工程學(xué)院,浙江 杭州 310032; 3. 中國計量大學(xué) 機電工程學(xué)院, 浙江 杭州 310018)
針對過程控制系統(tǒng)課程的特點,利用Matlab軟件進行了過程控制系統(tǒng)的仿真實驗教學(xué)研究和開發(fā),給出了基于Matlab軟件的過程控制系統(tǒng)仿真實驗方案。設(shè)計了4個仿真實驗,以臨界比例度參數(shù)整定法為例,給出了實驗教學(xué)實踐過程。該實驗教學(xué)方法具有簡單明了、可操作性強等特點,方便學(xué)生課下練習(xí),能夠加深學(xué)生對過程控制系統(tǒng)設(shè)計及系統(tǒng)性能分析等理論知識的理解,提高學(xué)生的動手能力及科學(xué)素養(yǎng)。
過程控制系統(tǒng); Matlab軟件; 仿真實驗教學(xué); 創(chuàng)新能力
過程控制系統(tǒng)是石油、化工、電力等工業(yè)生產(chǎn)中以表征生產(chǎn)過程的參數(shù)(如溫度、壓力、流量、液位和成分等)作為被控量,使之接近給定值或保持在給定范圍內(nèi)的自動控制系統(tǒng)[1-3]。過程控制系統(tǒng)是將自動控制原理、過程工藝設(shè)計、計算機控制及自動化儀表等知識相結(jié)合而構(gòu)成的一門應(yīng)用科學(xué),是自動化專業(yè)的核心課程[4]。
過程控制系統(tǒng)課程是一門偏向技術(shù)應(yīng)用的自動化專業(yè)課程,因此過程控制系統(tǒng)的實驗設(shè)計環(huán)節(jié)尤為重要[5-9]。以杭州電子科技大學(xué)為例,目前過程控制系統(tǒng)課程共56學(xué)時,其中包括12學(xué)時的課內(nèi)實驗或基于實驗設(shè)備的實驗。但是,由于學(xué)校實驗室數(shù)量及開放時間有限,難以滿足學(xué)生利用課余時間開展進一步實驗的需求。為此,筆者設(shè)計了基于Matlab的仿真實驗。教師可以根據(jù)課程進度及課程的重點知識來安排Matlab仿真實驗,使學(xué)生可以在課下針對理論學(xué)習(xí)及實驗過程中發(fā)現(xiàn)的問題,進行仿真實驗分析。這種實驗方式可以鍛煉學(xué)生通過數(shù)學(xué)工具來分析和解決問題的能力,同時激發(fā)學(xué)生的學(xué)習(xí)興趣,提高學(xué)生動手能力及創(chuàng)新能力。
1 基于Matlab的過程控制系統(tǒng)仿真實驗方案
筆者根據(jù)課程重點知識,分別在簡單控制系統(tǒng)、串級控制系統(tǒng)、前饋-反饋控制系統(tǒng)、比值控制系統(tǒng)的理論課教學(xué)之后各安排1次(共8學(xué)時)Matlab仿真實驗,并布置基于Matlab的仿真實驗作業(yè)。根據(jù)實驗作業(yè)的難易程度,仿真作業(yè)可布置為獨立作業(yè)或小組作業(yè)。理論教學(xué)、基于實驗設(shè)備的實驗和基于Matlab的仿真實驗相輔相成,三者有機融合,最終獲得良好的教學(xué)效果。
2 基于Matlab的仿真實驗設(shè)計
2.1 Simulink建模基本操作
Simulink軟件具有仿真和連接兩大功能。用鼠標(biāo)在模塊窗口上繪制出所需要的控制系統(tǒng)模型,然后利用Simulink提供的功能來對系統(tǒng)進行仿真和分析[10-12]。
(1) 實驗?zāi)康摹A私釹imulink模型的基本結(jié)構(gòu);了解Simulink模塊庫;掌握連續(xù)模塊(Continuous)、數(shù)學(xué)運算模塊(Math Operations)、輸入源模塊(Sources)及接收器模塊(Sinks)等模塊的使用方法。
(2) 實驗設(shè)備。安裝有Matlab軟件的計算機。
(3) 實驗內(nèi)容。某控制系統(tǒng)的傳遞函數(shù)表示為

用Simulink求它的階躍輸入響應(yīng),并將階躍響應(yīng)曲線導(dǎo)入Matlab的工作空間中,在工作空間中繪制階躍響應(yīng)曲線。
2.2 基于Matlab的串級控制系統(tǒng)仿真
(1) 實驗?zāi)康摹@肕atlab對串級控制系統(tǒng)進行參數(shù)整定;利用Matlab分析串級控制系統(tǒng)的抗干擾能力;比較串級控制系統(tǒng)與簡單控制系統(tǒng)的區(qū)別。
(2) 實驗設(shè)備。安裝有Matlab軟件的計算機。
(3) 實驗內(nèi)容。針對管式加熱爐出口溫度控制系統(tǒng),分析溫度-流量串級控制系統(tǒng)(見圖1)克服干擾的過程;構(gòu)成以加熱爐出口溫度為主變量、燃料油流量為副變量的串級控制系統(tǒng)。
假設(shè)主、副對象傳遞函數(shù)分別為
采用串級控制設(shè)計主、副PID控制器,并與簡單控制系統(tǒng)進行比較。對串級控制系統(tǒng)進行參數(shù)整定。
(4) 實驗原理。在系統(tǒng)結(jié)構(gòu)上,串級控制系統(tǒng)有2個閉合回路——主回路和副回路;有2個控制器——主控制器/主調(diào)節(jié)器和副控制器/副調(diào)節(jié)器;有2個檢測變送器——主檢測變送器和副檢測變送器。
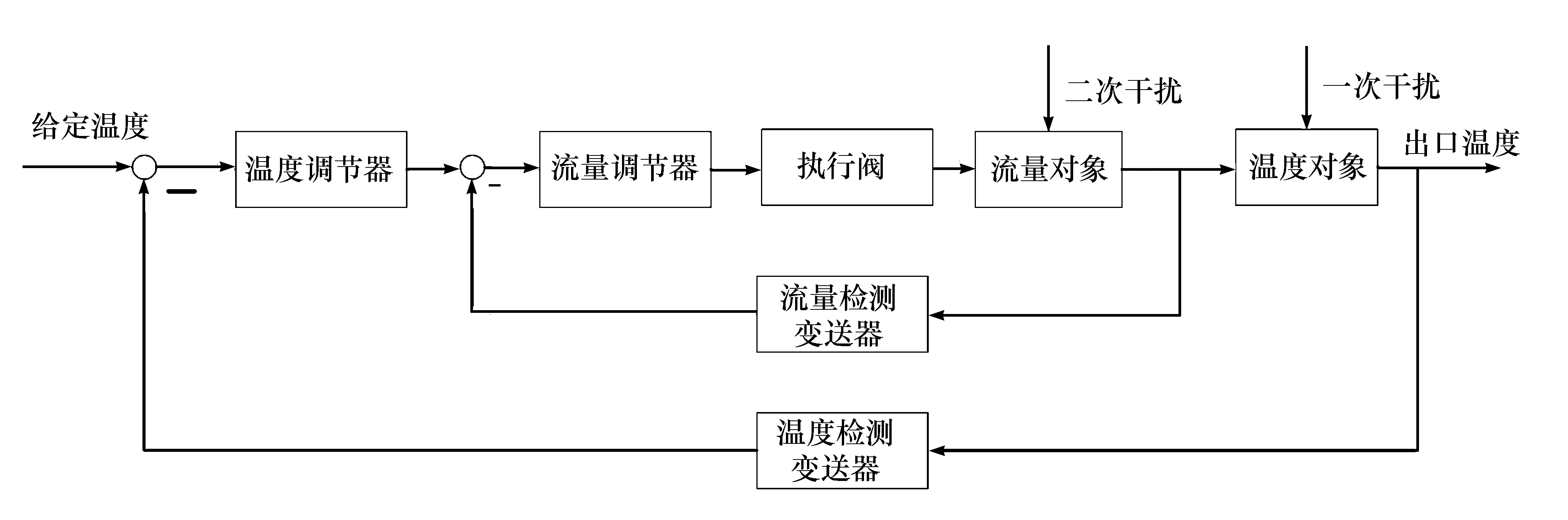
圖1 溫度-流量串級控制系統(tǒng)
串級系統(tǒng)由于增加了副回路,對進入副回路的干擾具有很強的抑制作用,因此作用于副回路的干擾對主被控量的影響較小。系統(tǒng)的主回路是定值控制,而副回路是隨動控制。在設(shè)計串級控制系統(tǒng)時,要求系統(tǒng)副被控對象的時間常數(shù)要遠小于主被控對象。此外,為了提高系統(tǒng)的控制精度,一般主調(diào)節(jié)器采用PI或PID調(diào)節(jié)器,而副調(diào)節(jié)器一般采用比例P控制,以提高副回路的快速響應(yīng)。串級控制系統(tǒng)的整定有一步整定法,也有兩步整定法——先整定副回路,后整定主回路。
串級控制系統(tǒng)由于副回路的存在,改善了控制對象的特性,減小了等效對象的時間常數(shù),提高了系統(tǒng)的工作頻率,改善了系統(tǒng)的動態(tài)性能,使系統(tǒng)的響應(yīng)加快、控制及時。同時,由于串級系統(tǒng)具有主、副兩只控制器,增大了總放大倍數(shù),增強了系統(tǒng)抗干擾能力。副控制器具有粗調(diào)作用,而主控制器具有細調(diào)作用,因而控制質(zhì)量顯然高于簡單的單回路控制系統(tǒng)。
2.3 基于Matlab的前饋-反饋控制系統(tǒng)仿真
(1) 實驗?zāi)康摹@肕atlab對前饋-反饋控制系統(tǒng)進行參數(shù)整定;利用Matlab分析前饋-反饋控制系統(tǒng)的抗干擾能力。
(2) 實驗設(shè)備。安裝有Matlab軟件的計算機。
(3) 實驗內(nèi)容。某加熱器前饋-反饋控制系統(tǒng)的控制通道和干擾通道的傳遞函數(shù)分別為
假設(shè)反饋控制器Gc(s)采用PI控制,選用合適的方法整定該系統(tǒng)并分析前饋-反饋控制系統(tǒng)的抗干擾能力。
(4) 實驗原理。前饋-反饋是復(fù)合調(diào)節(jié)系統(tǒng),選擇對象中主要的一些干擾作為前饋信號,對其他引起被調(diào)參數(shù)變化的各種干擾則采用反饋調(diào)節(jié)來克服,從而充分地利用了兩種調(diào)節(jié)作用的優(yōu)點,提高了控制質(zhì)量。前饋-反饋控制系統(tǒng)框圖如圖2所示。

圖2 加熱器前饋-反饋控制系統(tǒng)框圖
前饋-反饋控制系統(tǒng)既有前饋校正作用及時的優(yōu)點,又保持了反饋控制能克服多種擾動及對被控變量進行反饋的長處。整定前饋時,不接入反饋控制。前饋控制的整定方法和靜態(tài)前饋控制系統(tǒng)相同;反饋控制的整定方法和簡單控制系統(tǒng)整定方法相同。
2.4 基于Matlab的單閉環(huán)比值控制系統(tǒng)仿真
(1) 實驗?zāi)康摹@肕atlab對單閉環(huán)比值控制系統(tǒng)進行仿真分析。
(2) 實驗設(shè)備。安裝有Matlab軟件的計算機。
(3) 實驗內(nèi)容。對于比值控制系統(tǒng),要求副流量跟隨主流量變化而變化,其中兩流量儀表的信號比值系數(shù)為5,其中副對象的傳遞函數(shù)為
設(shè)計一個單閉環(huán)比值控制系統(tǒng)。
(4) 實驗原理。使2個或2個以上參數(shù)保持一定比例關(guān)系的控制系統(tǒng)稱為比值控制系統(tǒng)。單閉環(huán)比值控制系統(tǒng)是在開環(huán)比值控制的基礎(chǔ)上,增加了一個副流量的閉環(huán)控制系統(tǒng)。單閉環(huán)比值控制系統(tǒng)既可以實現(xiàn)副流量跟隨主流量變化而變化,又可以克服副流量本身干擾對比值的影響。單閉環(huán)比值控制系統(tǒng)方框圖如圖3所示[2]。

圖3 單閉環(huán)比值控制系統(tǒng)
3 實驗教學(xué)實踐
臨界比例度法又稱Ziegler-Nichols方法,它便于使用,而且在大多數(shù)控制回路中能得到良好的控制品質(zhì)。臨界比例度法是在系統(tǒng)閉環(huán)的情況下進行的[2],具體整定步驟如下:
(1) 將控制器的積分時間放在最大值(Ti→∞),微分時間放在最小值(Td=0),比例度δ放在較大值后,讓系統(tǒng)投入運行。
(2) 逐漸減小比例度,且每改變一次δ值時,都通過改變設(shè)定值給系統(tǒng)施加一個階躍干擾,同時觀察系統(tǒng)的輸出,直到過渡過程出現(xiàn)等幅振蕩為止。此時的過渡過程稱為臨界振蕩過程,δc max為臨界比例度,Tk為臨界振蕩周期。
(3) 利用δc max和Tk實驗數(shù)據(jù),按表1求出控制器的各個整定參數(shù)。將控制器的比例度換成整定后的值,然后依次放上積分時間和微分時間的整定值。

表1 臨界比例度法控制器參數(shù)計算表
以液位控制系統(tǒng)為例,在參數(shù)整定實驗中,利用Matlab根據(jù)臨界比例度法對PID控制器進行參數(shù)整定。首先,構(gòu)建Simulink仿真模型并進行Matlab仿真分析。如果實驗時間有限,可以提前讓學(xué)生搭建Simulink仿真模型(如圖4所示),供實驗課使用。

圖4 系統(tǒng)Simulink模型
其中,控制對象傳遞函數(shù)為
測量裝置和調(diào)節(jié)閥的傳遞函數(shù)為
Gv(s)=1
PID控制器傳遞函數(shù)為
利用臨界比例度法整定參數(shù)過程為:
(1) 在Simulink中,把反饋連線、微分器的輸出連線、積分器的輸出連線都斷開,將δc max的值從大到小進行實驗,每次仿真后,讀取示波器的輸出,直到出現(xiàn)圖5所示的等幅振蕩為止,記錄此時的δc max=1/30(即Kp=1/δc max=30)和振蕩周期Tk=2.81 s。

圖5 等幅振蕩曲線
(2) 根據(jù)表1可知,P控制時,設(shè)置比例放大系數(shù)Kp=15,仿真運行,得到比例P控制時系統(tǒng)的單位階躍響應(yīng)曲線如圖6所示。

圖6 P控制時系統(tǒng)的單位階躍響應(yīng)曲線
(3) 根據(jù)表1,當(dāng)采用PI控制時,設(shè)置比例放大系數(shù)Kp=13.64;設(shè)置積分時間常數(shù)Ti=2.39。將積分的輸出連線連上,仿真運行,得到PI控制時如圖7所示的系統(tǒng)單位階躍響應(yīng)曲線。

圖7 PI控制時系統(tǒng)的單位階躍響應(yīng)曲線
(4) 根據(jù)表1,當(dāng)采用PID控制時,設(shè)置比例放大系數(shù)Kp=17.65;設(shè)置積分時間常數(shù)Ti=1.41;設(shè)置微分時間常數(shù)τ=0.35。將微分器的輸出連線連上,仿真運行,可以得到如圖8所示的PID控制時系統(tǒng)的單位階躍響應(yīng)曲線。

圖8 PID控制時系統(tǒng)的單位階躍響應(yīng)曲線
由圖6、圖7和圖8可以看出,P控制與PI控制的階躍響應(yīng)上升速度基本相同,由于對應(yīng)的比例系數(shù)不同,系統(tǒng)的輸出值也不同;且PI控制的超調(diào)量比P控制的要小,PID控制比P控制和PI控制的響應(yīng)速度要快,但是超調(diào)量大一些。
由于工程整定方法是根據(jù)經(jīng)驗公式,故不是任何情況都適用。采用表1中的經(jīng)驗值整定PID參數(shù)的方法具有很大的保守性,因此需要根據(jù)實際情況進行一定的調(diào)整。由圖7可知,按照表1整定的PI控制器參數(shù)并不是最佳的。將比例放大系數(shù)Kp調(diào)整為13.5,積分時間常數(shù)Ti設(shè)置為12.5,進行仿真,將得到如圖9所示的系統(tǒng)階躍響應(yīng)曲線。

圖9 系統(tǒng)的單位階躍響應(yīng)曲線(Kp=13.5,Ti=12.5)
4 教學(xué)效果分析
學(xué)生在建立Simulink模型后,通過設(shè)計PID控制器并對參數(shù)進行整定,分析系統(tǒng)的靜、動態(tài)性能,加深了對過程控制系統(tǒng)相關(guān)理論知識的理解。例如:在完成串級控制系統(tǒng)的理論教學(xué)后,即安排學(xué)生進行基于Matlab的串級控制系統(tǒng)仿真實驗和仿真作業(yè)。仿真實驗既可以在多媒體教室隨堂進行,也可以在課下進行,時間自由度較大。學(xué)生普遍認為這種基于Matlab的控制系統(tǒng)實驗操作性強。教學(xué)實踐表明:80%~90%的學(xué)生可以獨立完成實驗作業(yè)并獲得滿意的實驗效果;而沒有獲得滿意實驗效果的學(xué)生可以通過與同學(xué)或教師討論、交流后獲得滿意的實驗效果。基于Matlab的過程控制系統(tǒng)實驗激發(fā)了學(xué)生的學(xué)習(xí)興趣、促進了學(xué)生的相互交流學(xué)習(xí)、鍛煉了學(xué)生的動手能力、提高了學(xué)生發(fā)現(xiàn)問題和解決問題的能力。
5 結(jié)語
過程控制系統(tǒng)是一門偏向技術(shù)應(yīng)用的自動化專業(yè)課程,實驗設(shè)計環(huán)節(jié)尤為重要。過程控制系統(tǒng)是面向大學(xué)三年級學(xué)生開設(shè)的專業(yè)課程,而大部分自動化專業(yè)學(xué)生的畢業(yè)設(shè)計需要用到Matlab軟件對控制系統(tǒng)進行仿真分析。基于Matlab的過程控制系統(tǒng)仿真實驗的開設(shè)將為四年級學(xué)生的工程訓(xùn)練及畢業(yè)設(shè)計打下重要的基礎(chǔ)。
References)
[1] 潘永湘,楊延西,趙躍.過程控制與自動化儀表[M].北京:機械工業(yè)出版社,2007.
[2] 薛安克,孔亞廣.過程控制[M].北京:高等教育出版社,2013.
[3] 施仁,劉文江,鄭輯光,等.自動化儀表與過程控制[M].北京:電子工業(yè)出版社,2011.
[4] 侯志林.過程控制與自動化儀表[M].北京:機械工業(yè)出版社,2002.
[5] 李國勇.過程控制實驗教程[M].北京:清華大學(xué)出版社,2011.
[6] 李敏,鄒濤,楊馬英,等.過程控制系統(tǒng)綜合性實驗設(shè)計與教學(xué)實踐[J].實驗技術(shù)與管理,2011,28(6):100-104.
[7] 常艷超,孫娜.過程控制基礎(chǔ)課程的教學(xué)改革與創(chuàng)新[J].電腦知識與技術(shù),2016,12(9):147-148.
[8] 崔桂敏,賈玉瑛.自動化專業(yè)應(yīng)用型人才培養(yǎng)模式的改革與實踐[J].實驗室研究與探索,2009,28(11):114-116.
[9] 張月靜.過程控制系統(tǒng)課程設(shè)計性實驗的探索與研究[J].實驗室科學(xué),2014,17(4):19-22.
[10] 石良辰.MATLAB/Simulink系統(tǒng)仿真超級學(xué)習(xí)手冊[M].北京:人民郵電出版社,2014.
[11] Bequette B. Process control:modeling, design, and simulation[M].London:Prentice Hall,2003.
[12] 王正林,郭陽寬.過程控制與Simulink應(yīng)用[M].北京:電子工業(yè)出版社,2006.
Design of simulation experiment of process control system based on Matlab
Wang Qian1, Chen Guoda2, Li Xiaolu3
(1. College of Automation, Hangzhou Dianzi University, Hangzhou 310018, China; 2. College of Mechanical Engineering, Zhejiang University of Technology, Hangzhou 310032, China; 3. College of Mechanical and Electrical Engineering, China Jiliang University, Hangzhou 310018, China)
Aiming at the characteristics of process control system, the simulation experimental teaching of process control system is studied based on the Matlab. The course experiment of process control system is designed based on the Matlab and four examples are given. Besides, the experimental teaching practical process is described by taking the critical proportional method as an example. This experimental teaching method is concise, explicit and strongly operational, which is convenient for the students to practice after class. It can deepen the theoretical knowledge understanding of process control system design and system performance analysis, and improve their operational ability and scientific literacy.
process control system; Matlab software; simulation experimental teaching; innovative ability
10.16791/j.cnki.sjg.2017.02.031
2016-09-07 修改日期:2017-01-06
國家自然科學(xué)基金項目(61503105);浙江省教育科學(xué)規(guī)劃項目(2013SCG054);全國工程專業(yè)學(xué)位研究生教育自選研究課題(2016-ZX-243);浙江工業(yè)大學(xué)教學(xué)改革項目(JG201611)
王茜(1985—),女,吉林長春,博士,講師,主要從事控制理論的教學(xué)和科研工作.
E-mail:wq@hdu.edu.cn
G642
A
1002-4956(2017)2-0119-05
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
小哥白尼(趣味科學(xué))(2019年6期)2019-10-10 01:01:50
作文世界(小學(xué)版)(2018年4期)2018-10-16 17:13:34
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
快樂作文·低年級(2016年12期)2017-01-03 20:52:44
發(fā)明與創(chuàng)新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55