汽車線控轉向系統的模糊滑模控制研究
2017-02-27 03:40:48孔慧芳
自動化儀表 2017年1期
孔慧芳, 朱 翔, 王 海
(合肥工業大學電氣與自動化工程學院,安徽 合肥 230009)
汽車線控轉向系統的模糊滑模控制研究
孔慧芳, 朱 翔, 王 海
(合肥工業大學電氣與自動化工程學院,安徽 合肥 230009)
針對汽車線控轉向系統結構復雜、模型參數具有不確定性以及存在多種干擾源的問題,設計了一種模糊滑模控制方法。基于滑模控制算法,設計了標稱控制器和滑模補償控制器。通過滑模補償控制器,消除了系統參數的不確定性和路面條件變化對轉向性能的影響。采用模糊邏輯設計滑模邊界層,削弱了滑模控制中的抖振問題。仿真結果表明,當路面條件發生變化時,模糊滑模控制能有效削弱滑模控制的抖振現象,具有較好的響應速度和魯棒性。
汽車線控轉向系統; 標稱控制器; 滑模補償器; 傳感器; 滑模控制; 模糊控制; 魯棒性; 參數擾動
0 引言
汽車線控轉向(steer-by-wire,SbW)系統是近年來國內外研究學者關注的一種新型轉向系統,SbW系統去除了方向盤和轉向輪之間的機械連接,具有提高汽車安全性、操縱穩定性、駕駛舒適性的特點[1]。目前,SbW系統的控制研究得到了一定的發展和應用。文獻[2]提出一種基于分數階微積分理論的控制器,能夠很好地提高轉向系統的魯棒性,但是控制器參數的整定需要不斷調試。文獻[3]采用滑模控制器跟蹤理想車輛模型的質心偏側角和橫擺角速度,但未考慮滑模抖振問題。文獻[4]、文獻[5]采用飽和函數代替符號函數的方法,對滑模面設置邊界層,抑制了抖振問題。但邊界層的設置來源于經驗,過大或過小的邊界層都會影響控制效果。
本文在前人研究成果的基礎上,設計了模糊滑模的控制方法,將滑模面和滑模面的導數作為模糊控制器的輸入。這種設計方法可以自適應地調整邊界層的厚度,消除系統抖振。仿真分析中給出了瀝青路面和雨雪路面兩種路面情況下的仿真結果。結果表明,該控制方法具有良好的響應速度和魯棒性,能夠滿足線控轉向系統的跟隨性能要求。
1 線控轉向系統建模
SbW系統結構示意圖如圖1所示。
SbW系統可分為轉向盤模塊、控制器和轉向前輪模塊3個部分。轉向盤模塊包含轉向盤、路感電機、轉向盤角傳感器;轉向前輪模塊包含轉向執行電機、轉向前輪、齒輪角傳感器等部件。轉動轉向盤時,會產生一個轉角參考信號,控制器根據轉向盤模塊給出的轉角參考信號和車速信號,發出控制命令到轉向電機,使得轉向前輪跟隨轉角參考信號。

圖1 SbW系統結構示意圖
1.1 轉向盤總成模型
方向盤模型為:
(1)
路感電機模型為:
(2)
采用直流電機,電機電路方程為:
(3)
電機電磁轉矩為:
Tm1=Kmim
(4)
以上公式中:Tsw為駕駛員施加到轉向盤上的力矩;Jsw為轉向盤轉動慣量;Bsw為轉向柱阻尼系數;θh為轉向盤轉角;Ksw為轉向柱的扭轉剛度;θm1為路感電機轉角;gm1為減速比;Tm1為路感電機電磁力矩;Jm1為路感電機轉動慣量;Bm1為路感電機阻尼系數;Rm為電樞電阻;im為電機電流;Um為電機電壓;Lm為電機電感;Km為電機轉矩系數。
1.2 轉向前輪總成模型
轉向執行電機模型為:
(5)
轉向前輪模型為:
(6)
式(5)、式(6)中:Jm2為執行電機轉動慣量;Bm2為執行電機阻尼系數;Tm2為執行電機電磁扭矩;θm2為執行電機轉角;Tr為執行電機經減速機構后對外輸出的扭矩;ηm2為減速機構的效率;gm2為減速機構減速比;Tf為系統摩擦扭矩;Te為正力矩作用在齒條上的扭矩;Jw為前輪的轉動慣量;Bw為前輪的阻尼系數;Tz為轉向電機施加到前輪的力矩;θf為轉向前輪轉角。
(7)
(8)
式中:c1為前輪側偏剛度系數;a為質心到前輪距離;v為車速;c2為后輪側偏剛度系數;b為質心到后輪距離;m為整車質量;Iz為車輛轉動慣量。
假設齒輪與齒條之間沒有間隙,可以得到θm2和它們各階導數之間的關系如下:
(9)
式中:K為傳動比。
1.3 系統模型
結合式(5)、式(6)以及式(9),得到的轉向前輪模塊等效模型如下:
(10)
式中:Jeq和Beq為等效的轉動慣量和阻尼系數。
Jeq=Jw+K2Jm2
(11)
Beq=Bw+K2Bm2
(12)
u=KTm2
(13)
考慮系統的標稱值和不確定部分影響,式(10)改寫如下:
(14)
式中:d為系統總的不確定部分。
d可表示為:
(15)


(16)
2 控制器設計
2.1 滑模控制器設計
轉向前輪參考轉角為:
(17)
式中:θhr(t)為轉向盤參考角;θh(t)為轉向盤軸轉角;N為轉向盤模塊傳動比。
定義跟隨誤差e(t)為:
e(t)=θf(t)-θhr(t)
(18)
(19)
由式(19)可以得到系統跟隨誤差的二階導數如下:
(20)
(21)
式中:d′為等效系統總的不確定部分。
將u(t)分為標稱控制和滑模補償控制兩部分:
u(t)=u1(t)+u0(t)
(22)
式中:u1(t)為標稱反饋控制器(nominal feedback controller,NFC);u0(t)為系統滑模補償控制器(sliding mode compensator,SMC)。

(23)
式中:k1、k2滿足Hurwitz多項式條件。

(24)
根據滑模控制的基本思想,選擇線性切換函數,定義滑模變量:

(25)
式中:λ為大于0的正數。
為了使跟隨誤差e漸近收斂到0,設計滑模補償控制器為:


(26)

考慮Lyapunov函數V=s2/2,可以證明得到:


(27)

不等式(27)確保了滑模變量最終能夠到達滑模面。
滑模補償控制器u0是為了補償系統的不確定性、非線性等因素而加入的不連續控制部分,它的存在提高了系統的魯棒性,但同時也引起了系統狀態環繞滑模面的抖振。
去除抖振的一個有效方法是在滑模面附近引入一個邊界層,將滑模控制不連續部分的符號函數修改為飽和函數[4-5]:
(28)
式中:σ為邊界層的寬度。
2.2 模糊滑模控制器設計
在滑模控制中,雖然引入了邊界層控制方法削弱抖振,但是過窄的邊界層,對不確定系統的高頻抖振消除效果不明顯;過寬的邊界層,又會出現較大的穩態誤差[6-7]。邊界層的選取往往采用經驗和試湊法。若采用固定的邊界層,將無法很好地適應系統參數發生變化(比如路面條件變化)對滑模系統抖振的抑制效果。為獲得最佳的抖振抑制效果,應用模糊規則對邊界層的厚度進行調整。
本文設計模糊邏輯系統的輸入量為s,表示任意點到滑動面的相對距離。模糊邏輯系統的輸出量為滑模控制邊界層的寬度。定義模糊語言變量為7個子集:負大(NB)、負中(NM)、負小(NS)、零(Z)、正小(PS)、正中(PM)、正大(PB),并定義輸入論域均為{-3,3},輸出模論域為{0,1},超過此范圍按邊界值處理。根據專家經驗和試驗修正,建立如表1所示的控制規則表。
表1 模糊規則表
Tab.1Fuzzyrules
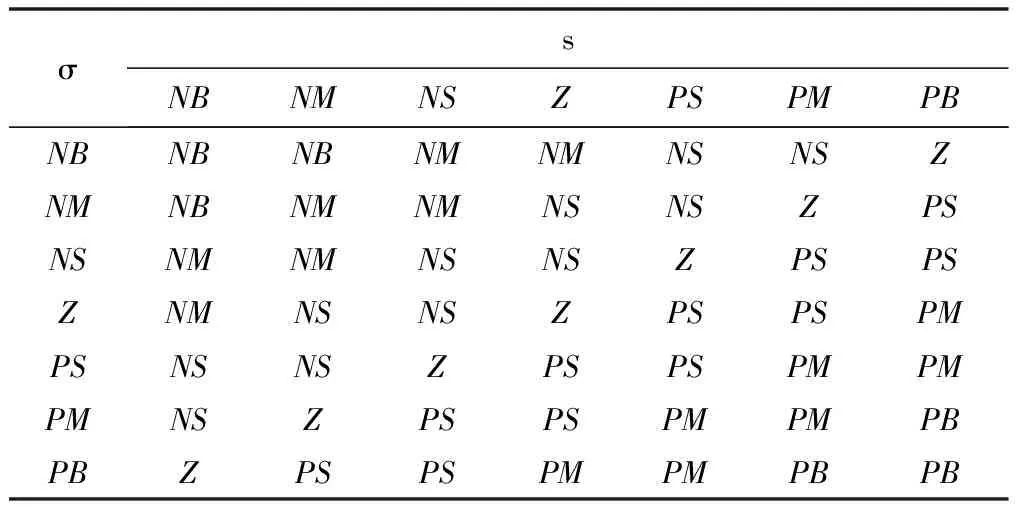
σsNBNMNSZPSPMPBNBNBNBNMNMNSNSZNMNBNMNMNSNSZPSNSNMNMNSNSZPSPSZNMNSNSZPSPSPMPSNSNSZPSPSPMPMPMNSZPSPSPMPMPBPBZPSPSPMPMPBPB
表1中的控制規則可以用以下模糊條件語句來描述:



模糊輸入量和輸出量選取相同的隸屬度函數,NB選擇Z型隸屬度函數,PB選擇S型隸屬度函數,其余均選擇如圖2所示的三角形隸屬度函數。

圖2 隸屬度函數示意圖
由模糊控制器給出的控制量需要進行清晰化處理,本文采用重心法解模糊[8]。
(29)
3 仿真結果及分析
以某款汽車線控轉向系統為例,模糊滑模控制器結構[8-10]如圖3所示。

圖3 模糊滑模控制器結構圖
為了驗證所設計模糊滑模控制器的有效性,利用Matlab編寫SbW系統的固定邊界層滑模控制算法和模糊滑模控制算法。設置兩種不同的路面情況,以驗證當系統參數改變時模糊滑模控制對系統抖振的抑制效果。
在0s時,給轉向盤輸入一個正弦信號,汽車車速為60km/h;0~15s時為雨雪路面、15~30s時為瀝青路面。仿真得到轉向前輪對于給定參考信號的跟隨性能和控制器輸出扭矩信號。圖4為固定邊界層滑模控制器仿真曲線。從仿真曲線可以看出,當轉向盤輸入一個正弦轉角信號,固定邊界層取0.27時,轉向前輪轉角在整個仿真過程中能夠很好地跟隨參考轉向信號,最大跟隨誤差為±0.253rad。由圖4(b)可見,當路面情況發生變化時,控制系統具有較大的抖振,且不能逐漸穩定。

圖4 固定邊界層滑膜控制器仿真曲線
圖5為模糊滑模控制器仿真曲線。

圖5 模糊滑膜控制器仿真曲線
對系統邊界層進行模糊控制后,系統的最大跟隨誤差為±0.242rad。當路面情況發生變化時,傳統滑模控制和模糊滑模控制均表現出很好的魯棒性。
模糊控制器的滑模邊界層輸出示意圖如圖6所示。

圖6 模糊控制器的滑模邊界層輸出示意圖
4 結束語
在分析滑模控制原理的基礎上,給出了一種模糊滑模控制器的設計方法。將滑模控制器分為標稱控制器和滑模補償器,利用滑模補償器消除系統不確定性和外界干擾對系統的影響;并將模糊控制方法應用于滑模邊界層的自適應調整,從而抑制系統參數發生變化時的系統抖振問題。
最后將模糊滑模控制器應用于某汽車線控轉向系統的控制器,并給出仿真結果。結果表明,基于邊界層模糊調節的滑模控制方法,根據系統滑模變量狀態的變化,動態模糊調整滑模邊界層的寬度,有效改善了當環境變化時固定邊界層[11-13]滑模控制存在的抖振問題,對系統參數變化具有很強的魯棒性,非常適合應用在汽車線控轉向系統。
[1] 田爭芳.基于模糊滑模控制的汽車線控轉向系統研究[D].濟南:山東理工大學,2013.
[2] 田杰,高翔,陳寧.基于分數階微積分的線控轉向系統的控制研究[J].機械科學與技術,2010,29(9):1172-1176.
[3] 韓坤,任春燕.基于滑模控制的線控轉向系統仿真[J].湖北汽車工業學院學報,2013,27(3):1-4.
[4] 彭曉燕.汽車線控制動系統安全控制技術研究[D].長沙:湖南大學,2013.
[5]CAOJB,CAOBG.Fuzzy-logic-basedsliding-modecontrollerdesignforposition-sensorlesselectricvehicle[J].PowerElectronicsIEEETransactionson,2009,24(10):2368 - 2378.
[6]ERBATURK,KAWAMURAA.Chatteringeliminationviafuzzyboundarylayertuning[C]//IECON.IEEE,2002:2131-2136.
[7] 楊玲玲,章云,陳曉龍.一類不確定非線性系統的模糊邊界層滑模控制[J].系統仿真學報,2009,21(22):7262-7265.
[8] 李士勇.模糊控制·神經控制和智能控制論[M].哈爾濱:哈爾濱工業大學出版社,1998.
[9]WANGH,MANZ,SHENW,etal.Robustcontrolforsteer-by-wiresystemswithpartiallyknowndynamics[J].IEEETransactionsonIndustrialInformatics,2014,10(4):2003 - 2015.
[10]余志生.汽車理論[M].3版.北京:機械工業出版社,2005.
[11]張曉宇,陳文卓,申斌.一種離散模糊滑模邊界層自適應的消抖方法[J].自動化儀表,2015,36(8):1-6.
[12]WANGH,KONGH,MANZ,etal.Slidingmodecontrolforsteer-by-wiresystemswithACmotorsinroadvehicles[J].IEEETransactionsonIndustrialElectronics,2014,61(3):1596 - 1611.
[13]ZHANGX,KONGH,WANGH.Acompositecontrolschemeforautomotivesteer-by-wiresystem[C]//2014Proceedingsofthe6thInternationalConferenceonModelling,Identification&Control(ICMIC).IEEE,2014:237-242.
ResearchontheFuzzySlidingModeControlofAutomobileSteer-by-WireSystem
KONGHuifang,ZHUXiang,WANGHai
(SchoolofElectricalEngineeringandAutomation,HefeiUniversityofTechnology,Hefei230009,China)
Theautomobilesteer-by-wiresystemfeaturescomplexstructures,uncertainmodelparametersandfacingmultipledisturbances,aimingattheseissues,afuzzyslidingmodecontrolschemeisdesigned.Thenominalcontrollerandslidingmodecompensationcontrolleraredesignedbasedonslidingmodecontrolalgorithm,theuncertaintyofthesystemparametersandtheinfluenceofvariationofroadsurfaceconditionsonsteeringperformanceareeliminatedthroughslidingmodecompensationcontroller.Inaddition,theslidingmodeboundarylayerisdesignedbyusingfuzzylogictorelievethebuffetingprobleminslidingmodecontrol.Thesimulationresultsshowthatthefuzzyslidingmodecontrolcaneffectivelyrelievethebuffetingphenomenonwhenconditionsofroadsurfacechange,anditpossessesbetterresponsespeedandstrongrobustness.
Automobilesteer-by-wiresystem;Nominalcontroller;Slidingmodecompensator;Sensor;Slidingmodecontrol;Fuzzycontrol;Robustness;Parameterperturbation
中央高校基本科研業務費專項資金資助項目(2014HGCH0003)
孔慧芳(1964—),女,博士,教授,主要從事新能源汽車電控技術、自動變速箱電控技術的研究。E-mail:konghuifang@163.com。朱翔(通信作者),男,在讀碩士研究生,主要研究方向為新能源汽車電控技術。E-mail:www.zhu-xiang@163.com。
TH-3;TP
ADOI: 10686/j.cnki.issn1000-0380.201701007
修改稿收到日期:2016-05-19
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
汽車與安全(2019年9期)2019-11-22 09:48:03
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
家庭影院技術(2017年9期)2017-09-26 03:41:45
作文大王·低年級(2016年4期)2016-04-18 00:24:37
決策探索(2014年21期)2014-11-25 12:29:50
