汽車前照燈近光明暗截止線確定方法研究
2017-02-27 05:04:38李祥兵
汽車電器 2017年1期
李祥兵
(神龍汽車有限公司,湖北武漢 430050)
汽車前照燈近光明暗截止線確定方法研究
李祥兵
(神龍汽車有限公司,湖北武漢 430050)
結合神龍公司開發的東風標致3008前照燈,探討明暗截止線清晰度和V點的確定方法。
明暗截止線;前照燈;最大等級法
汽車近光明暗截止線,即光束投射到配光屏幕上,目視感覺到的明暗顯著變化的分界線。汽車前照燈近光明暗截止線的高低,意味著近光在路面上照射距離的遠近。近光截止線太高,容易使對面的來車或行人感到炫目;太低則照得太近,使駕駛員無法看到車前較遠的距離。因此,近光明暗截止線的高度穩定對于行車安全和駕駛體驗都非常重要。通常,在近光截止線的獲取中,光屏上會出現一種比較模糊的截止線,導致截止線無法正常被設備捕捉。本文基于神龍公司3008前照燈開發項目,對模糊截止線的確定方法進行了深入探討。
1 近光明暗截止線的獲取方法
根據相關法規,當近光燈打開時,在汽車前照燈的正前方路面,會形成一種非對稱的光形面。根據所在的區域,可劃分為照距區域(明暗截止線區域,車前50~75 m處的區域)、舒適區域(車前30~50 m的區域)、寬度(近光的最大寬度,車前20~30m)和駕駛盲區(車前20m以內)[1]。
若在車前30 m以內的任意處放置一光屏,則會形成如圖1所示的上暗下明的清晰明暗截止線。

圖1 近光形成的明暗截止線
圖1中,明暗截止線上水平線A-A的離地高度需要滿足國標的要求,即該高度應在0.7~0.9H(其中H為近光燈基準中心的離地高度,光屏應在車前距近光基準中心10m處)之間,該高度同時對照明的寬度有影響。15°斜線A-B-C的最大離地高度決定了近光照距的遠近。通常情況下,要使近光照得足夠遠,駕駛員視野足夠清晰,除需要近光截止線滿足國標要求外,還需要根據國標的相關規定使近光的照度滿足要求。一般而言,對于近光截止線,其光形角度應該滿足的要求是:光形的角度線不能超過15°±1°30′,水平線不能超過0°±1°30′,截止線應該清晰可見。
2 模糊明暗截止線的清晰度
在很多情況下,由于照度、光學設計等原因,造成近光的截止線在光屏上并非像圖1所顯示的那樣清晰。根據GB4599中規定[2],明暗截止線的轉折處應在V-V線上,若轉折處不清晰,則以滿足75R、50R的照度為準。圖2是東風標致3008前照燈的近光截止線圖。盡管從遠處看還比較清晰,但是在水平線和15°的分界線的交界處,顯示高低不平,不清晰,導致該點用現有的技術來捕捉HC點比較困難,進而確定近光的相關參數比較困難。

圖2 標致3008前照燈近光明暗截止線
通常情況下,前照燈近光明暗截止線理論分界線和實際分界線重合部分由兩部分組成:水平區域(左側部分從-5%到-1.75%,等同于-3°到-1°區域)及分界線的傾斜區域(右側部分從1.75%到5%,傾斜度為15°),如圖3所示。

圖3 明暗截止線的理論定義
中間部分的理論定義一般取消,因為前照燈在該處的重合性一般不好。中間這一段以及水平線與15°線交點可以用下面的最大等級法來實現。
3 最大等級法的計算機理
最大等級法是確定清晰明暗截止線以及V點的一種理論計算方法。其基本原理就是在圖4中E1和E2的位置分別設置一個傳感器,高度距離為0.2%。在豎直方向上掃描光束以確定光照界限,根據車輛的行駛方向確定HC的左側和右側處1°、2°和3°進行掃描測量,并分別對3臺車進行同樣的測量,確定最大等級。采用以下公式

式中:E1——傳感器1的照度,lux;E2——傳感器2的照度,lux)。
在通常情況下,如果以上3個值介于0.3~0.6之間即認為合格,即模糊度合格。
上述最大等級公式也說明分界線應位于f1的最大處,這樣才能得到光強最大點。當得到-1°、-2°和-3°的分界線后,取3個值的平均值計算得到0°處的點,通過一系列翻轉對該點進行調節。

圖4 最大等級法傳感器的布置圖
在理論上,通過1個或2個傳感器從上往下掃描+ 2%到-2%的區域,發光強度的變化通過計算機來計算。通過對-1°、-2°和-3°進行掃描可以得到3條曲線。但是,按照上述標準計算的值具有不確定性,原因在于2個傳感器E1和E2存在0.2%的偏差。當測試儀器在垂直方向掃描時,其掃描過的位置并不一定是傳感器的實際位置,因此,需要補充另一個公式來對上述誤差進行修正

這樣,截止線的精確位置和V點就可以用以下關系式來表達

4 試驗驗證
4.1 數據處理
在東風標致3008前照燈上,采用了H9雙功能橢球模塊(近遠光一體),其近光明暗截止線由遮光板來實現。這3條曲線區域所得到的照度數據分別對應-1°、-2°和-3°的測量值。
由-1°、-2°和-3°在水平截止線上除X=0的值,對應的照度值相差較小,其余的對應部位按照強度從大到小逐步變化。
下面按照前面所述的公式來進行推算

式中:i,j=1,2,3…
通過對實際測試數據進行處理,可以得出表1,表2和表3中數據。
4.2 對-1°、-2°和-3°截止線位置的討論
通過表1、表2和表3,可以得到在-1°、-2°和-3°三種情況下在V-V方向的f1的平均值。由該平均值,可以得到圖5所示的曲線。
從圖5可以看出,表1所得出的f1(-1°)在Y方向的值最大,按照前面的最大等級法的原則,應該選擇該組數據來計算截止線的實際位置。

表1 掃描-1°時的對比度

表2 掃描-2°時的對比度
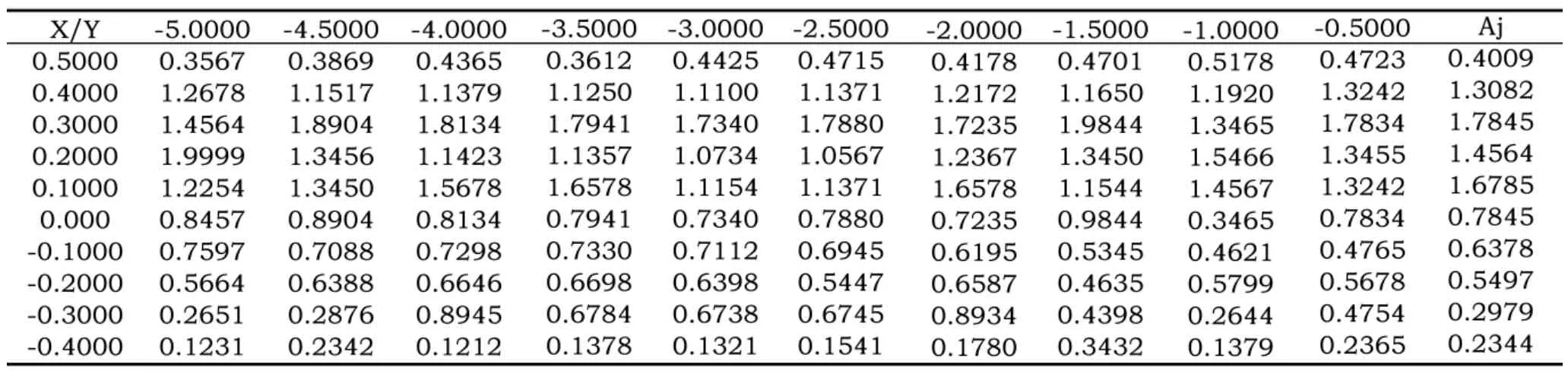
表3 掃描-3°時的對比度

圖5 實際測量值對應的f1曲線圖
由表1中的數據,并根據公式(2),同樣可以得出f2的計算數據。通過對數據進行分析,可以看出,無論照度在某一區域多大,其對應的修正值都比較小。因此,得出的實際明暗截止線為圖6所示。

圖6 實際的明暗截止線
盡管圖6從趨勢上看,有一個很大的陡坡,但是由于最大照度與最小照度之間相差約1.1142lux,即相當于約700 cd(1 lux=625 cd)的光強,在理論上仍然是允許的。那么根據公式(3)中的結論,該曲線就是實際要找到的明暗截止線,圖6中的最高點就是明暗截止線上的V點位置。
從以上分析中,得出了實際的截止線以及V點位置,但實際上,這條截止線用肉眼仍然是無法看出來的,主要原因在于近光光形的品質欠佳(水平角度不滿足0°±1°30′,光形角度線不能滿足15°±1°30′要求)和截止線不清晰。
5 結論
通過以上分析,可以得出以下結論。
1)從表1、表2和表3中可以看到,在同一水平線上,所顯示的照度數值并沒有太明顯的變化。這說明明暗截止線在水平方向基本趨于均勻,這同時也說明遮光板或遮光帽的形狀沒有出現飛邊等嚴重的品質問題。
2)基于表1的數據計算出來明暗截止線,反映了在-1°、-2°和-3°處連續掃描的最優明暗截止線,該明暗截止線同時也說明了照度值在此截止線兩側分布(Y向)的差異性要比其他兩組數據明顯,而這正是在截止線比較模糊的情況下,所得出的相對清晰的截止線。V點的確定一般處在明暗截止線的最亮點,即明暗截止線照度最大點,該點決定了照距的遠近,對近光的整個配光效果具有重要的意義。
本文所闡述的理論值計算方法,盡管在數據的處理上相對較為復雜,但是在當前的設備無法捕捉的情況下,該方法對明暗截止線和V點的獲取,并對設備的參數修正具有一定的指導意義。
[1]B25 7110[M]:STN FACE ARRIERE,FACE LATERALE ECLAIRAGE ET SIGNALISATION.
[2]GB4599—2007,汽車用燈絲燈泡前照燈[S].
[3]柳發苔,吳錫琪,饒文碧,等.前照燈近光明暗截止線質量評判[J].中國照明電器,1997(5):25-29.
[4]鄭志軍,胡永亮.汽車前大燈明暗截止線偏移問題探索[J].照明工程學報,2012,23(2):108-111.
[5]王麗君.LED汽車前照燈光學設計與實現[D].廣州:華南理工大學,2012.
[6]楊樹忠,張昆.汽車前大燈照明特性的測試[J].汽車電器,2000(6):55-57.
[7]趙紅.E型汽車前照燈光形質量問題分析[J].青海科技,1997(4):31-33.
(編輯心翔)

圖12 不同海拔環境高速大負荷階段空燃比對比
4 優化后驗證結果
通過高海拔排放試驗驗證和標定參數的優化,最終車輛達到歐IV標準要求,具體結果見表4。

表4 優化后的高海拔環境下排放結果
5 結論
綜上所述,為改善高海拔條件下整車的排放,對裝備二次空氣泵的發動機,在進行標定過程中,需考慮以下方案。
1)調整二次空氣泵工作時的空燃比控制,確保高海拔環境下二次空氣泵工作期間的空燃比處于最佳。
2)通過發動機臺架試驗,驗證不同海拔環境下的發動機泵氣損失差異,依據測試的泵氣損失差異標定整車轉矩。
3)高速大負荷階段,避免進入開環加濃控制。
參考文獻:
[1]石建,劉獻棟.高原條件下車輛動力性能分析及改進研究[C]//2009中國汽車工程學會年會論文集,2009.
[2]GB 18352.3—2005,輕型汽車污染物排放限值及測量方法(中國III、IV階段)[S].
[3]劉樂,陸紅雨,王玉偉,等.不同海拔下自然吸氣輕型汽油車性能研究[J].汽車工程,2014(8):929-934.
(編輯心翔)
Research on Low Beam Cut-off Line Confirmation of Front Lamp
LI Xiang-bing
(Dongfeng Peugeot Citroen Automobile Company,Wuhan 430050,China)
Referring to Peugeot 3008 front lamp produced by DPCA,this article discusses the definition of cut-off line and the way to confirm V point.
cut-off line;front lamp;maximum rating method
U463.651
A
1003-8639(2017)01-0019-04
2016-06-06
李祥兵(1981-),男,碩士,工程師,主要研究方向車燈開發設計。
猜你喜歡
今日農業(2021年9期)2021-11-26 07:41:24
發明與創新·小學生(2021年3期)2021-03-25 11:48:49
汽車與安全(2019年9期)2019-11-22 09:48:03
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
中國科技博覽(2016年2期)2016-04-25 20:32:39
作文大王·低年級(2016年4期)2016-04-18 00:24:37
小學生導刊(2016年34期)2016-04-11 00:49:44
電測與儀表(2015年5期)2015-04-09 11:30:52
決策探索(2014年21期)2014-11-25 12:29:50
民生周刊(2012年10期)2012-10-14 09:06:46