電子皮膚觸覺傳感器研究進展與發展趨勢
2017-02-08 06:50:23曹建國周建輝繆存孝尹海斌李維奇
哈爾濱工業大學學報 2017年1期
曹建國 , 周建輝, 繆存孝, 尹海斌, 李維奇, 夏 飛
(1.北京科技大學 機械工程學院,北京 100083;2.加州大學圣地亞哥分校 雅各布斯工學院,圣地亞哥 92093;3.華北理工大學 遷安學院,河北 唐山 064400;4.武漢理工大學 機電工程學院,武漢 430070)
?
電子皮膚觸覺傳感器研究進展與發展趨勢
曹建國1, 2, 周建輝1, 3, 繆存孝1, 尹海斌4, 李維奇1, 夏 飛1
(1.北京科技大學 機械工程學院,北京 100083;2.加州大學圣地亞哥分校 雅各布斯工學院,圣地亞哥 92093;3.華北理工大學 遷安學院,河北 唐山 064400;4.武漢理工大學 機電工程學院,武漢 430070)
從介紹人類皮膚的觸覺感知性能出發,全面綜述了國際上多學科領域模擬人類皮膚的電子皮膚觸覺傳感器研究進展與關鍵技術;分析討論了電子皮膚觸覺傳感器的工作原理、新型材料和結構、先進設計制作方法、觸覺傳感特性和性能指標等方面內容;重點總結了國內外近年來在電子皮膚陣列觸覺傳感器柔性化、彈性化、空間分辨率、靈敏度、快速響應、透明化、輕量化和多功能化等方面的研究進展.指出了電子皮膚觸覺傳感器的研究依然存在著難以兼顧高柔性和高彈性、高靈敏度電子皮膚設計制作工藝復雜,可擴展性差和成本高等技術難題.電子皮膚觸覺傳感器可廣泛應用于機器人、醫療健康、航空航天、軍事、智能制造和汽車安全等領域,正朝著高柔彈性、寬量程的高靈敏度、多功能、自愈合與自清潔、自供電與透明化等方向發展.
電子皮膚;傳感器;柔彈性;觸覺; 仿生機器人
“隨著信息化、工業化不斷融合,以機器人科技為代表的智能產業蓬勃興起”,人們期待未來能夠研發出與人和生物更加接近的仿人仿生機器人[1-2].當前,機器人技術的發展特點和趨勢是智能化以及人與機器人的交互共融[3].傳感器技術是機器人智能化的先決條件,電子皮膚觸覺傳感器Tactile Sensor for E-Skin[4]作為非常重要的可穿戴設備之一,直接關系到下一代機器人、醫療設備、人體假肢和可穿戴設備等載體的智能化和多功能化,受到了多學科研究人員的高度重視,符合未來發展需求,近年受到《Science》等國際著名科學期刊的持續廣泛關注和積極評價,成為當今國際學術研究的熱點問題之一[4-7].
觸覺是機器人等實現與環境直接作用的必需媒介,觸覺本身有很強的敏感能力,可直接測量對象和環境的多種性質.觸覺傳感器的研究從嚴格的工業領域到與人、社會接觸等多領域,根據傳感器本身的軟、硬包覆層和覆蓋應用范圍,觸覺傳感器通常可分為3類[8]:第1類是硬質皮膚(Hard skins)觸覺傳感器,主要有力/力矩傳感器、力敏電阻傳感器、加速度計和變形傳感器等.這類硬質皮膚通常包含多個觸覺傳感器,通過多傳感器的均值來提供比單一傳感器更好的測量分辨率.如西班牙加泰羅尼亞技術大學的工業機器人,手臂上安裝這種有觸覺傳感器的硬質皮膚可用來檢測碰撞、測量接觸力和接觸位置等[9];哈爾濱工業大學蔡鶴皋院士等[10]在弧焊機器人上應用該類觸覺系統可檢測3個方向的力,完成三維空間焊縫的自我示教;日本早稻田大學的52-DoF仿人機器人WENDY手臂上安裝了6軸力/力矩傳感器(每個手臂6個)和力敏電阻傳感器,可檢查接觸狀態和位置,以及接觸力的大小、方向和持續時間,并能同時測量多個接觸[11],但空間分辨率受到限制,一般大于100 mm2.第2類是近年國際上重點研究的柔性皮膚(Soft Skins)[8]或人工皮膚(Artificial Skin)或電子皮膚(Electronic Skin)觸覺傳感器[4,12-22].電子皮膚觸覺傳感器[4,12-15]被定義為能夠通過接觸表征出被測物體的性質(表面形貌、重量等)或數值化接觸參量(力、溫度等)的設備或系統.電子皮膚觸覺傳感器,又名新型可穿戴仿生觸覺傳感器,是貼在“皮膚”上的電子設備,因而習慣性地被稱為電子皮膚[18-19],或敏感皮膚(Sensitive Skin)、智能皮膚(Smart Skin)、仿生皮膚(Bionic Skin)等[4,13-19].電子皮膚觸覺傳感器大多被排列成矩陣組成陣列觸覺傳感器,電子皮膚陣列觸覺傳感器的空間分辨率可達到毫米級,接近人類的皮膚.由于電子皮膚觸覺傳感器可覆蓋于機器人、醫療設備與人體假肢等復雜的三維載體表面,并準確感知周圍環境的各種信息,成為機械、電子、儀器和醫學等領域的研究熱點之一.第3類是內接觸式觸覺傳感器,用來檢測機器人各部分的狀態,而不是檢測被測對象周圍的外部信息,其表面沒有任何的覆蓋和皮膚保護,如工業機器人手臂關節/力矩傳感器,在非人機交互領域如工業結構環境下已完善應用多年,其不足之處就是可提取的觸覺信息相當有限,如空間分辨率相當低且接觸位置難以確定[8].為了覆蓋機器人等復雜的三維表面和活動的關節部位,電子皮膚陣列觸覺傳感器通常還必須具有高柔性與高彈性等,美日等發達國家和我國近年均投入了巨大的人力與物力,至今仍是研究的重點與難點[4-9],電子皮膚觸覺傳感器研發需要綜合運用多學科知識,以滿足機器人、醫療健康、航空航天、軍事、智能制造、汽車安全和手機與電腦的觸摸式顯示屏等多領域需求,具有廣泛應用前景.
1 人類皮膚與觸覺感知性能
人類皮膚能感知觸覺、痛覺、熱覺等多種感覺,其中觸覺的感知尤為重要[4,17].人的觸覺主要通過分布在皮膚不同深度的大量機械刺激感受器中的4種觸覺感受器(見圖1(a))感知[23-25]:表層皮膚中的邁斯納小體和皮膚深層的環層小體均為快速適應感受器,前者可快速響應3~40 Hz低頻動態范圍窄的外界刺激,實現低頻振動和運動檢測與握力控制等感覺功能;后者可快速響應40~500+Hz高頻動態范圍寬的外界刺激,實現高頻振動和工具使用等感覺功能;與之相對的是,分布于全身表皮基底細胞之間的一種具短指狀突起的默克爾細胞和位于真皮內的長梭形的魯菲尼小體均是慢適應感受器,前者可慢響應0.4~3.0 Hz低頻動態范圍窄的空間變形、持續的壓力,曲面、邊緣甚或尖角等外界刺激,實現模式/形態檢測與紋理感知等感覺功能;后者可慢響應100~500+Hz高頻動態范圍寬的持續向下的壓力、橫向皮膚拉伸和皮膚滑動等外界刺激,實現手指位置、穩定抓取、切向力和運動方向等感覺功能.
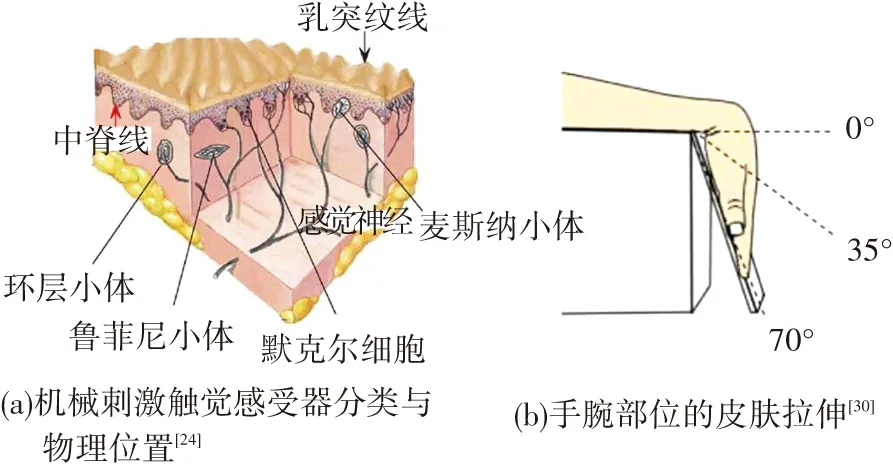
圖1 人體皮膚
人類皮膚非常直觀可見,人們往往易忽視其復雜性.如皮膚中默克爾細胞、邁斯納小體、魯菲尼小體和環層小體等4種觸覺感受器的空間分辨率分別為0.5、3.0~4.0、7.0+和10.0+mm,且人體各部位觸覺感受器分布密度差異大.比如成年人的指尖和手掌心分別分布了241和58 cm-2觸覺感受器,使得人體各部位的空間分辨率差異顯著,自指尖、面部和腳趾等到大腿、腹部的空間分辨率由最高下降到最低,比如指尖和腹部的空間分辨率分別接近1 mm和大于30 mm[24].英國曼徹斯特大學Cody等[26]通過心理物理學實驗量化發現:手腕背表面的空間分辨率高于手和前臂的其它部位,肢體軸線橫向比縱向的空間分辨率更高,這種效應可能來自于一階觸覺感覺單元及其高階投射神經元的感受場的不對稱性;美國約翰霍普金斯大學Bensma?a等[27]通過1~8 mm的空間分辨率和5~80 Hz的振動頻率變化物體的靜態和振動光柵試驗發現,空間分辨率隨著振動觸覺的振動頻率增加而下降.快速響應方面,人類觸覺最高動態檢測到700 Hz的振動頻率,即響應時間僅約為1.4 ms;美國印第安納大學Craig和我國杭州大學XU Baihua[28]通過同一手指、同一手上的不同手指和不同手的手指上觸覺傳感試驗發現,人類皮膚指尖上不同位置的兩個事件的臨界感觸響應時間為30~50 ms級.可控的壓力靈敏度研究表明:男性手掌和指尖的法向壓力閾值平均分別約為0.158 g和0.055 g,女性的相應值分別為0.032 g和0.019 g[29].
人類皮膚自然狀態下不僅具有高柔性,英國Cody課題組[30]和美國佐治亞理工學院Bhattacharjee課題組[31]的研究結果顯示,作為人體體表最富柔彈性的手腕部位的皮膚能夠在手腕彎曲時還能經受最大20.4%的拉伸率,如圖1(b)所示,可貼合于三維復雜靜/動態表面同時完成觸覺感知,卸載后皮膚具有的高彈性使其能夠恢復原來的形狀.
2 電子皮膚觸覺傳感器研究進展
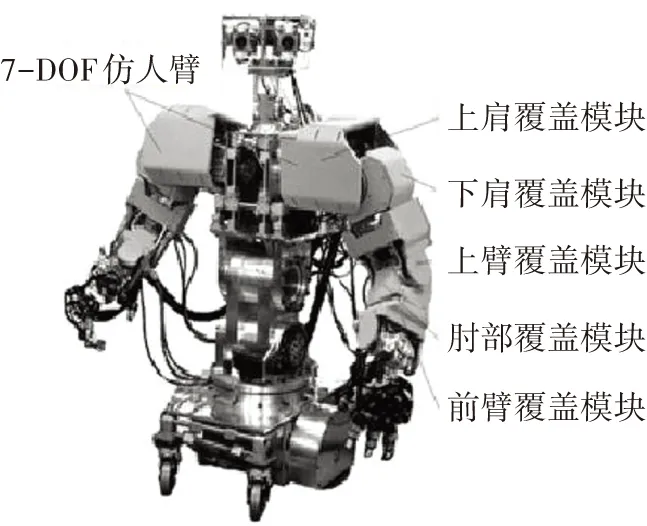
圖2 覆蓋電子皮膚柔性觸覺傳感器的WENDY機器人[33]
Fig.2 WENDY robot covered with the electronic skin flexible tactile sensor
相對于聽覺、視覺而言,觸覺感官的模仿十分困難[32].相較于第1類剛性觸覺傳感器,電子皮膚更加輕薄柔軟,可被加工成各種形狀,像衣服一樣附著在人體或者機器人等載體的身體表面,以便模仿甚或超越人類皮膚感覺功能[23],實現人體生理狀態檢測、醫療健康服務與機器人的智能化.早在20世紀70年代,國際上就已開始對電子皮膚觸覺傳感器的探索與研究,但進展緩慢[24].80年代觸覺研究增長迅速,壓阻式、電容式、光電式等原理均得到應用,但精度低且對于微小作用力更是束手無策.90年代觸覺傳感技術研究繼續增長并多方向發展.本世紀以來尤其是近幾年,電子皮膚觸覺傳感器柔性化、彈性化、透明化、可擴展性、輕量化和多功能化等方面[4,5,16-19,33-39]取得顯著進展,如日本早稻田大學Iwata課題組采用柔性皮膚[33]代替硬質皮膚[11]的觸覺傳感器厚度為3 mm,肩和臂部空間分辨率為20 mm,分布于WENDY機器人全身,識別人機交互的觸覺信息,如圖2;Bhattacharjee課題組[31](2013)研發了由彈性針織物制作的電子皮膚觸覺傳感器,并設計制作了具有25個傳感單元的彈性袖套電子皮膚,分別覆蓋于仿人機器人的前臂和2自由度腕關節等,驗證了其功能;瑞士洛桑聯邦理工學院的Gerrat等[39](2014)用有機硅泡沫材料作為介質薄膜,采用雙層的5 nm Cr和30 nm Au薄膜蒸鍍于PDMS(Ploydimethysiloxane)薄膜的方法制備了彈性電極,第一次將基于電容式的電子皮膚彈性觸覺傳感器成功應用于iCub仿人機器人手手套的背面上,完成了障礙物檢測和表面重建任務[39].
目前,電子皮膚觸覺傳感器種類繁多,可廣泛應用于工業生產與醫療設備中,其中用于接觸壓力測量的電子皮膚觸覺傳感器是最具挑戰性且應用潛力最大的[4,5,12-19,29-33].大部分早期研制的觸覺傳感器多為采用硅作為主要材料的微傳感器[40],其制造技術主要采用MEMS微機電系統技術實現良好的空間分辨率,形成微小陣列,體積小,成本低.由于硅微型壓力傳感器難以滿足大面積覆蓋的電子皮膚觸覺傳感器需要的柔性化和可擴展性等要求,東京大學Someya課題組[41](2004)基于有機場效應晶體管(OFETs)開發了壓力測量的電子皮膚柔性壓阻式陣列觸覺傳感器.除電極之外,此傳感器的所有部件都由軟性材料制作而成,所以即使包裹于半徑2 mm的圓柱之上,仍可保證正常使用.如圖3(a),此傳感器在保證較低成本并可大面積制作的基礎上,實現了柔性化;隨后(2005)引入“漁網”結構[42],如圖3(b),使得傳感器能被拉伸25%同時測量接觸壓力.雖然依靠“漁網”結構實現的彈性附著在載體或活動關節時將會消失,但該工作明確了主要從材料和結構兩方面著手開發電子皮膚觸覺傳感器的方法.
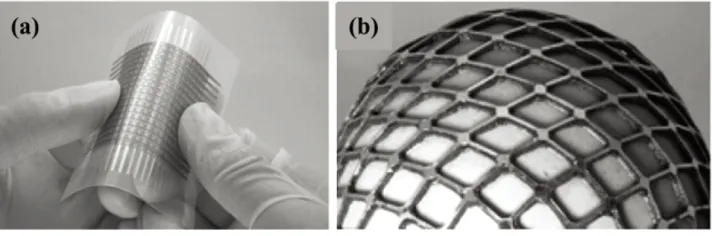
(a) 基于有機場效應管[41] (b) 基于“漁網”結構[42]
2.1 電子皮膚觸覺傳感器的柔性化與交互式
2.1.1 采用拼接式實現柔性化
采用拼接式是實現電子皮膚陣列觸覺傳感器柔性化的途徑之一.東京大學Ohmura等[43](2006)利用多個包含微小壓敏單元的獨立模塊分散布置于靜態三維表面,模塊之間通過串行總線連接并可擴展實現復雜曲面壓力測量的柔性觸覺傳感器,如圖4,但難以用于動態表面或活動關節,且空間分辨率低.Ohmura等從適形性、順應性、測量范圍和靈敏度、安裝空間、覆蓋面積、質量、能耗、尺寸、韌性和可制造性方面提出的電子皮膚觸覺傳感器設計要求已被國內外諸多研究者遵循和采用.
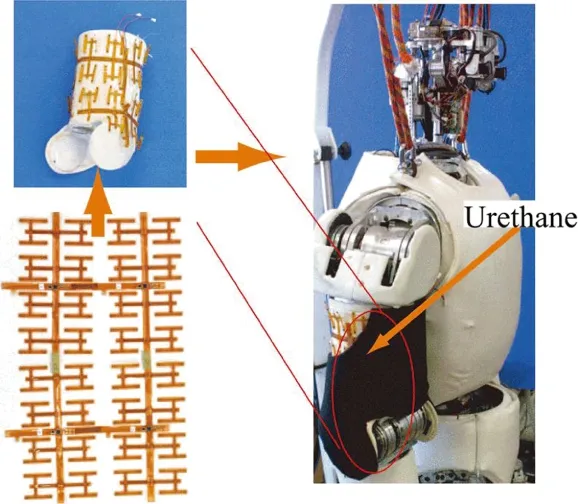
圖4 獨立傳感單元通過串行總線連接形成柔性壓力陣列觸覺傳感器[43]
Fig.4 Independent pressure sensing units to form flexible array tactile sensor via serial bus connection
我國東華大學的呂曉洲等[20,38,44]開發了一種能夠實時測量三維界面應力的新型平板電容柔性壓力觸覺傳感器,這種傳感器基于PCB(printed circuit board)耦合電極和PDMS制作而成,由體積較小的單個傳感器拼接成電子皮膚陣列觸覺傳感器,可用于檢測截肢表面和假肢接口之間的應力分布以及人體足底應力分布,如圖5.合肥工業大學的黃英等[45]利用有機硅導電銀膠、金屬膜和炭黑/硅橡膠復合材料等,采用可拼接的正六邊形模塊化的陣列結構設計出一種基于串行總線的電容式電子皮膚柔性陣列觸覺傳感器,兼顧可擴展性,實現可穿戴和大面積觸覺感知.
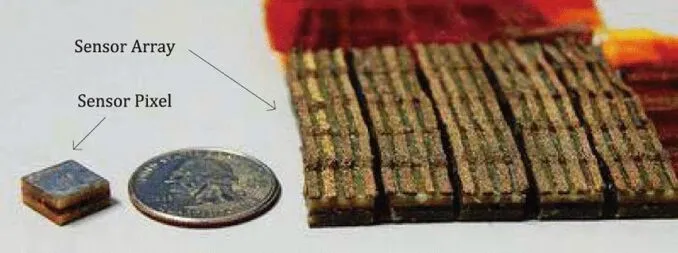
圖5 基于平板電容的三維界面應力測量電子皮膚柔性陣列觸覺傳感器[44]
Fig.5 Three-dimensional interface stress measurement electronic skin flexible array tactile sensor based on plate capacitor
2.1.2 采用新材料和新結構實現柔性化
近年來,人們更多探索采用新材料和新結構實現觸覺傳感器柔性化.黃英等[13,17,46]基于柔性壓力敏感導電橡膠開發了用于三維壓力檢測的電子皮膚壓阻式柔性陣列觸覺傳感器.針對導電橡膠的體壓阻效應和界面壓阻效應分別設計了多層網狀陣列式結構和單層陣列式結構,并對傳感器陣列的信號處理電路和補償電路進行了深入的研究[47-48].這種柔性觸覺傳感器在體育訓練、康復醫療以及智能機器人等領域有廣闊的應用前景.
加州大學伯克利分校Javey課題組的Takei等[49]使用接觸印刷法將平行的半導體(Ge/Si)納米線陣列附著于柔性的聚酰亞胺基底材料,制作了基于場效應晶體管的壓力測量電子皮膚柔性觸覺傳感器,能夠檢測動態壓力且在超過2 000次的彎曲半徑為2.5 mm的彎曲試驗中保持性能穩定,如圖6(a),但難以實現可擴展性且缺乏彈性.西安交通大學張學鋒等[50]利用薄層金屬銀電極、PET基底和壓阻橡膠的良好柔性制作了基于壓阻原理的電子皮膚柔性壓力陣列觸覺傳感器,分散的圓形傳感單元被布置在柔性的PET薄片上,實現了陣列傳感器的柔性化.韓國工業技術研究院的Cho 課題組[40]利用導電油墨和硅彈性體合成材料借助成型工藝制作了電子皮膚壓阻式柔性陣列力觸覺傳感器,傳感單元尺寸為20 mm×20 mm×5 mm,最小分辨力為0.011 N,制造成本低,但在超薄(通常要求在1.5 mm以內)和輕量化等方面的不足限制了其應用.
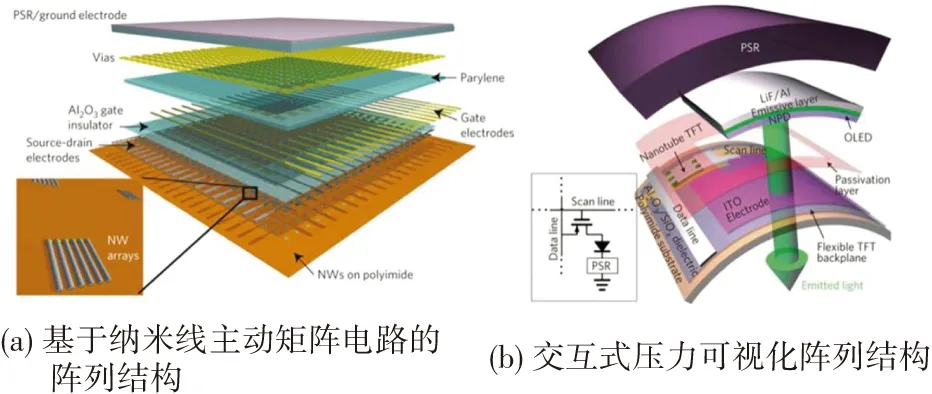
圖6 壓力測量的電子皮膚柔性觸覺傳感器[40]
Fig.6 Electronic skin flexible tactile sensor for pressure measurement
2.1.3 采用新材料和新制作技術實現柔性化、交互式
美國加利福尼亞大學Wang等[14](2013)將納米管制作的薄膜晶體管、壓敏橡膠和有機發光二極管陣列集成于聚酰亞胺基底材料,制作了第一款用戶交互式電子皮膚柔性觸覺傳感器.該柔性觸覺傳感器通過發光二極管的光強瞬時地表示出施加外力的幅度,可廣泛應用于交互式輸入/控制設備、智能壁紙、機器人和醫療/健康監測設備,如圖6(b).新材料結合新制作技術增加了電子皮膚觸覺傳感器的功能.2.2 電子皮膚觸覺傳感器的彈性化、透明化與柔彈性化2.2.1 采用新材料和新結構實現彈性化、透明化
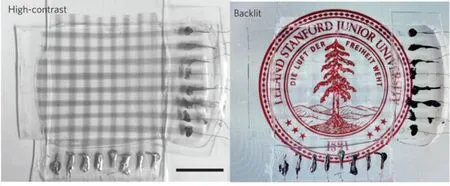
圖7 基于PDMS和碳納米管的壓力/應變測量的電子皮膚陣列觸覺傳感器[12]
Fig.7 Pressure/strain measurement electronic skin array tactile sensor based on PDMS and carbon nanotubes
美國斯坦福大學Zhenan Bao課題組Lipomi等[12](2011)將碳納米管噴涂于PDMS基底制作了具有良好透明度和彈性的電容式電子皮膚陣列觸覺傳感器,如圖7.PDMS幾乎完全透明且具有良好的彈性,拉伸率可達到100%以上.附著或埋于彈性材料中的蜷曲的碳納米管以及由其形成的網狀結構使宏觀的導線能夠隨著彈性材料的拉伸而伸長同時保證導電性,從而實現了整體結構的彈性.此陣列傳感器既能檢測壓力又能檢測拉力,但是由于擠壓和拉伸都會明顯改變電容信號,所以只易于用來單獨測量應變或者拉伸率不變的情況下測量壓力.存在同樣問題的還有Zhenan Bao課題組2012年選擇PDMS作為光波導和基底材料,基于有機發光二極管和有機光敏二極管制作了一款光電壓力傳感器[15].該觸覺傳感器不但透明度好,易于大面積制作,并且具有良好的循環穩定性和耐彎曲特性.透明度對于用作電子皮膚的觸覺傳感器很重要,良好的透明化能夠保證利用太陽能驅動的機械設備對光能的吸收.
美國伊利諾伊大學厄巴納-香檳分校Rogers和西北大學Huang聯合課題組[5,51]通過結構和形狀設計,利用傳統無機材料如金屬、硅基材料等制成柔、彈性導電元件,采用三維“波”結構使得傳統無機導電材料能夠隨著彈性基底的延展而伸長變形但不會發生斷裂等破壞的方法,在2012年制作了一種可以穿帶于手指上的壓力測量的電子皮膚彈性陣列觸覺傳感器[51].這種結構在外界壓力作用下“波”狀導體各處的拉伸率不同,不會產生自然狀態下的拉伸形態,也有破壞導體的可能,因而在壓力觸覺傳感器研發應用上受到限制.
英國格拉斯哥大學的Yogeswaran課題組[52]基于CNT-PDMS納米復合材料制作了壓力測量的電阻式電子皮膚柔彈性觸覺傳感器,該傳感器由叉指銀的方式構建底部電極,連接由CNT-PDMS復合材料制成的頂部導電聚合物,可實現最小500 Pa的壓力值的檢測,能廣泛應用于機器人、醫療假肢等領域.美國阿克倫大學Vatani等[53](2016)利用離子液體和碳納米管新型納米復合材料制作了5層結構的接觸壓力測量的電子皮膚彈性觸覺傳感器,中心壓阻傳感層測量面積為1×1 mm2,中間兩層彈性電極板采用的碳納米管/光致聚合物納米復合材料的拉伸率可達30%,最外層為封裝層,主要適用于小范圍測量,可擴展性差.2.2.2 采用新材料、新結構和新加工制作技術實現柔彈性化、透明化
東京大學的Alirezaei等[54](2007)基于電阻抗斷層成像技術開發了一款壓力測量的電子皮膚觸覺傳感器,采用導電針織物取代了導線,實現了觸覺傳感器的柔性化和一定的彈性,可以很好地覆蓋于像人臉這樣復雜的三維表面以及活動的關節,并且具有超薄且可變形的特點.
北京科技大學曹建國課題組Wang等[55-56]充分利用銀納米線優良的導電性和納米尺寸效應,提出了一種基于“多孔PDMS”和AgNWs/PDMS納米復合材料電極的新型多層“三明治”式壓力傳感器陣列結構(圖8),采用了納米制造、電子束蒸鍍、磁控濺射、氧等離子體處理、3D打印、仿生設計和有限元仿真等先進制造技術.首先,制作基于納米復合材料的柔彈性導電薄膜電極層;其次,利用力敏導電壓阻橡膠開發了柔性壓阻式壓力傳感器陣列;然后,采用多孔PDMS及力敏導電壓阻橡膠制作柔彈性中間傳感層;隨后,設計采用新型多層“三明治”式壓力傳感器陣列結構和金屬薄層制作電子皮膚觸覺陣列傳感器;最后,實現傳感器陣列的封裝、拼合和裁剪實現其可擴展性.圖8中,圖8(a)為制備的新型銀納米線復合材料導電薄膜電極層的SEM掃描電鏡表面形貌圖像,圖8(b)為電子皮膚觸覺傳感器新型多層“三明治”結構示意圖,圖8(c)為制作完成的電子皮膚觸覺陣列傳感器及其高柔彈性的展示.這種電子皮膚觸覺傳感器不僅具有高柔性、高彈性,還能在0~180 kPa大量程范圍內實現高精度的測量,可擴展性好,性能穩定,可實現復雜表面或活動關節等的動態測量.為高柔彈性電子皮膚觸覺傳感器在醫療器械和智能機器人等復雜三維表面上的應用奠定了基礎,為高柔彈性電子皮膚實現和機器人等載體智能化提供了新的方法[19,57].

圖8 基于納米材料和新型“三明治”結構的柔彈性電子皮膚觸覺傳感器及其柔彈性展示[19]
Fig.8 Flexible and stretchable electronic skin tactile sensor and its soft impressions based on nanomaterials and new “sandwich” structure
德國比勒費爾德大學Gereon等[58](2015)利用導電針織物實現了良好柔彈性,將若干觸覺傳感單元嵌入到單一的傳感器膜片,具有很好的擴展性可覆蓋于各種形狀的物體.
2.3 電子皮膚觸覺傳感器的傳感特性與性能分析
2.3.1 電子皮膚觸覺傳感器的傳感特性
為了模仿甚或超越人類皮膚的觸覺感知特性,必須發展高空間分辨率、高靈敏度、快速響應、多功能、制造成本低、可擴展性強、可靠性高及其透明化的電子皮膚新型可穿戴柔彈性仿生觸覺傳感器.以最具挑戰性且應用潛力最大的接觸壓力測量的英國利茲大學Dogramadzi[59]、日本東京大學Someya[42]、美國加州大學伯克利分校Takei等[49]和北京科技大學曹建國課題組[19,57]的電子皮膚觸覺傳感器為例,其空間分辨率分別為5.0 mm×60.0 mm、4.0 mm×4.0 mm、4.0 mm×4.0 mm和4.5 mm×6.0 mm,逐步接近人類皮膚;Dogramadzi課題組和Someya課題組未提供可測量動態壓力頻率,本課題組和Javy課題組傳感單元均可>5 Hz,接近人類皮膚低頻動態范圍;Dogramadzi和Javey課題組分別采用銅電極和整片壓阻橡膠制作的電子皮膚觸覺傳感器具有良好柔性,但缺乏彈性,Someya課題組拉伸率達到了25%,本課題組研發的觸覺傳感器具有高柔性、高彈性,其拉伸率可達到30%,均達到并超越了人類皮膚最大的拉伸率,這對覆蓋機器人、醫療設備等復雜的三維表面和活動的關節部位非常重要.
下面討論電子皮膚觸覺傳感器高靈敏度和多功能等性能.
2.3.2 電子皮膚觸覺傳感器的高靈敏度性能分析
靈敏度S是電子皮膚觸覺傳感器的重要性能參數,可表示為
(1)
ΔC=C-C0.
(2)
式中:C0為基準壓力下的電導值,如電容值或電阻值;p為施加的壓力;C為施加壓力后的電導值.
以機器人、醫療和軍事等領域廣受關注的接觸壓力測量的電子皮膚觸覺傳感器為例,常見的壓力范圍為<1 Pa為超低壓力區[19,34,39],大致相當于聲波壓力,可用于助聽器、麥克風等;1~1 000 Pa為細微壓力區,可用于觸摸屏等;1~10 kPa為低壓力區,大致相當于人類輕觸壓力,可用于人機交互、服務機器人等;10~100 kPa為中壓力區,大致為手握操作對象的壓力范圍,可用于健康監測、足底壓力分布測量等;>100 kPa的高壓力區,可用于結腸鏡、醫療假肢和工業機器人等.根據電子皮膚柔/彈性觸覺傳感器壓力范圍依序討論其靈敏度性能.
Zhenan Bao課題組Tee等[60]和Benight等[61]探索利用自愈合的復合材料制作導電性能良好的電子皮膚.2014年,該課題組Pan等[34]從形狀及性質上進行改進,利用具有空心球微結構的鋸齒狀壓阻薄片開發了壓阻式的電子皮膚壓力觸覺傳感器.最小可檢測<1 Pa的壓力;在<30 Pa低壓力區具有-56.0~133.1 kPa-1的超高靈敏度;在<100 Pa壓力區依然具有7.7~41.9 kPa-1的很高靈敏度,其響應時間約為50 ms,可實現微小壓力的檢測(如圖9).
(a) 壓阻材料空心球微結構示意 (b)固化成型的鋸齒形結構 (c)傳感器響應測試
Fig.9 Piezoresistive pressure sensor array based on self-healing conductive piezoresistive composite and hollow sphere microstructure[34]
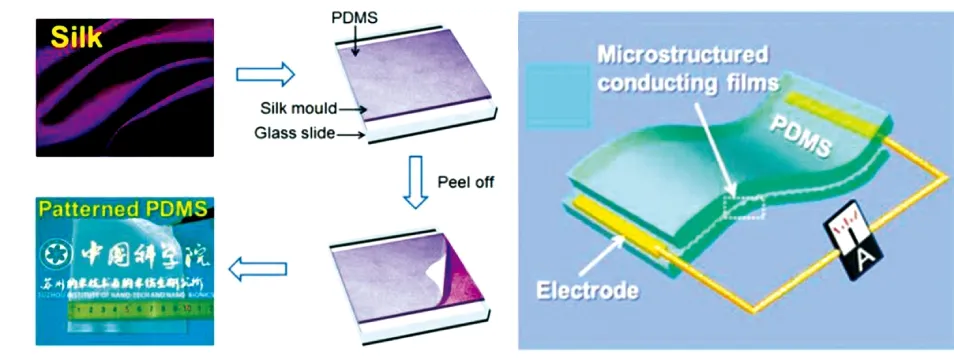
(a) 柔性圖案化PDMS膜的 (b)典型的電子皮膚示意制造工藝示意
圖10 基于PDMS的電子皮膚電容式高靈敏度觸覺傳感器[63]
Fig.10 Electronic skin highly sensitive capacitive tactile sensor based on PDMS
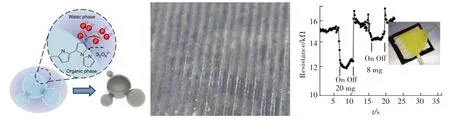
哈爾濱工業大學Wang和日本大阪大學Jiu等[62]填充有高濃度銀納米線-聚氨酯的彈性復合材料研發的電子皮膚柔性電容式壓力觸覺傳感器,低壓力區達到高靈敏度.在<30 Pa的低壓力區為5.54 kPa-1,30~70 Pa低壓力區為0.88 kPa-1.中國科學院蘇州納米技術與納米仿生研究所張珽課題組的Wang等[63],基于單壁碳納米管和超薄的PDMS薄膜制作了壓力測量的電子皮膚柔性電容式陣列觸覺傳感器,如圖10.這種電子皮膚觸覺傳感器的獨特之處在于將制作PDMS的預聚體與交聯劑混合物涂于絲綢模具之上,固化后將其剝脫,便在PDMS薄膜表面得到與絲綢織物微觀表面反相的紋理.該電子皮膚觸覺傳感器最小可檢測質量為0.01 g,相應最小可檢測壓力為0.6 Pa,在60~300 Pa小壓力區具有高靈敏度為1.80 kPa-1,可監測不同質量小昆蟲(如0.01 g螞蟻和0.04 g蜜蜂)、人的聲帶振動以及脈搏跳動,穩定性好,可用于監測人體生理信號.中國科學院半導體所沈國震課題組Lou等[64]與中國人民解放軍總醫院姜凱教授合作研制出一種基于石墨烯材料的電子皮膚柔性觸覺傳感器,可快速感知微小壓力變化,最小可檢測壓力為1.2 Pa,靈敏度為15.6 kPa-1,響應時間為5 ms,可實現脈搏和聲音識別等.
國立首爾大學Joo等[65]基于PDMS嵌入銀納米線制作多尺度結構的彈性電極研發的電容式電子皮膚柔性壓力觸覺傳感器,最小可檢測0.04 g質量,相應壓力為15 Pa,靈敏度高:在45~500 Pa的低壓力區為3.80 kPa-1,0.5~2.5 kPa的中壓力區為0.80 kPa-1,2.5 ~4.5 kPa的高壓力區為0.35 kPa-1.臺灣大學Lai等[66](2016)利用銀納米線作為電極材料在織物上固化形成的PDMS 薄膜制作了柔性電容式電子皮膚壓力觸覺傳感器,最小檢測壓力為0.6 Pa,<3.0 kPa的小壓力區具有超高靈敏度:1.04 × 104~6.57 × 106kPa-1,響應時間為20 ms.
意大利理工學院的Viry課題組[67]基于導電織物電極制作成柔性電極嵌入PDMS之中開發了一種全柔性電容式電子皮膚三軸力觸覺傳感器,其上層單電極與底層4個電極分別產生電容,通過測量4個電容值的相對變化能夠實現對多維力的高靈敏度的探測,最小可檢測質量為0.01 g,挑戰并超越了人類皮膚輕觸時約0.02 g水平.壓力在0.5~2.0 kPa(32~130 mN)時,具有0.53 kPa-1的高靈敏度;壓力在2.0~4.0 kPa時,具有0.30 kPa-1的高靈敏度;壓力在4.0~10.0 kPa,具有0.20 kPa-1的高靈敏度.清華大學Tian等[68](2015)研究的基于激光劃線石墨烯的電子皮膚柔性電阻式壓力觸覺傳感器,在寬量程壓力范圍具有很高靈敏度,在<50 kPa的低壓力區靈敏度為0.96 kPa-1,50~113 kPa的高壓力區靈敏度為0.005 kPa-1.
韓國先進科技研究所(KAIST)的Park課題組Morteza等[69](2014)基于銀納米線和PDMS彈性體,采用PDMS-銀納米線-PDMS的三明治結構制作了一種可穿戴手套檢測手指運動的電子皮膚彈性壓阻式應變觸覺傳感器,可在0°~120°彎曲角度范圍具有良好靈敏度,約為0.63 rad-1,并具有彈性好、性能穩定和制作成本低的特點.
2.3.3 電子皮膚觸覺傳感器的多功能性能
早在2005年,Someya課題組[42]就通過在“漁網”結構的壓力傳感器陣列中疊加溫度傳感器陣列,實現了壓力和溫度同時測量.日本精工株式會社的Ishikawa和Daisuke等[70-71]采用將敏感材料置于兩片導電薄膜之間的夾層結構,提出一種利用超薄、柔性、輕量化的測量壓力中心的電子皮膚觸覺傳感器實現滑覺檢測的方法.該傳感器可安裝于機器人多指手上,在1 ms的時間內測量出分布載荷的中心位置和施加于傳感器表面的總載荷.黃英[17]等(2011)采用三維力和溫度傳感器凹凸狀交替排布的結構構建柔性多功能觸覺傳感器陣列,可應用于智能機器人電子皮膚對三維力和溫度的檢測.韓國蔚山國家科學技術研究所的Park等[72-73](2014)受啟發于人類皮膚的表皮層與真皮層的互鎖結構,基于碳納米管和PDMS形成互相連鎖的小型拱形結構,制作了可以感知壓力方向的電子皮膚觸覺傳感器,如圖11.這種電子皮膚觸覺傳感器靈敏度高,可感知較小的壓力,甚至可以感知空氣流的方向、位置及強烈程度.
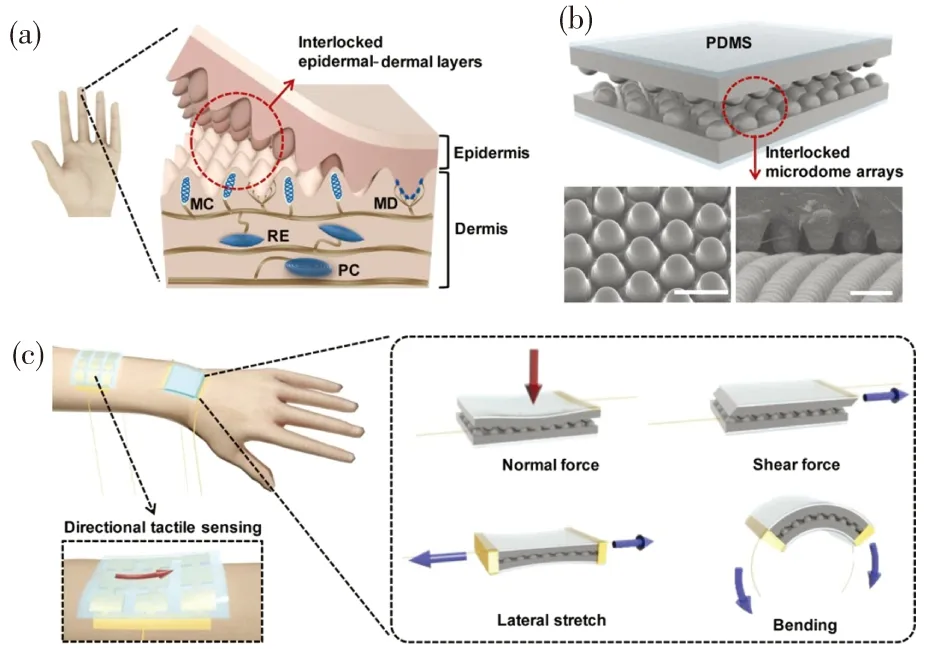
(a)人類皮膚的表層與真皮層的互鎖結構(b)基于碳納米管和PDMS形成互鎖的小型拱形結構(c)可以感知的壓力方向
圖11 可感知壓力方向的電子皮膚觸覺傳感器[72-73]
Fig.11 Electronic skin tactile sensor with a function of pressure direction sensing
3 電子皮膚觸覺傳感器研發存在的主要難題
電子皮膚觸覺傳感技術經過近年來的快速發展,已經取得了一系列的成果,尤其是以機器人科技為代表的智能產業蓬勃興起,在制造業、醫療、國防安全和服務等領域為其顯示出了廣闊的應用前景[1-9,39],如日本福島核電站在大地震后,部分輻射嚴重的地區不適于人類工作,日本政府已委托本田公司著力為他們已有的ASIMO機器人研制電子皮膚觸覺傳感器,以使其能夠更好地感知周圍環境,工作于大地震后福島核電站部分輻射嚴重的區域;隨著機器人參與的智能制造模式的發展,新一代機器人不再被固定在安全工作地點,靈活機器人與人類可以在智能工廠一起協同工作.通過感知智能和多傳感器融合提高機器人的環境適應性,有利于機器人與人類建立起一種新型的人機共融模式[74-79],但其研究和開發依然存在諸多難題,現總結如下.
3.1 電子皮膚陣列觸覺傳感器兼顧高柔性和高彈性難題
人們期待新型的電子元件能夠彎曲、延展、擠壓、扭轉或變形成復雜的曲面形狀.電子皮膚陣列觸覺傳感器作為柔彈性電子元件的一種,為了模擬人類皮膚能夠覆蓋于機器人等載體復雜的三維表面和活動關節,必須具有很高的柔彈性[4-9].來自意大利技術研究所的研究結果表明,要想實現人類手腕部位的拉伸,仿生皮膚的彈性范圍應該在30%左右.因此,優化仿生皮膚觸覺傳感器,實現其在大拉伸率狀態下正常工作是研究的重點與難點之一.
陣列觸覺傳感器柔性化方面進展顯著,研究人員主要從3個方面解決觸覺傳感器柔彈性的問題.首先,材料的選擇對柔彈性的實現至關重要,PDMS由于其在化學惰性、溫度穩定性、透明度等方面的優勢,常被選作基底材料,而研究人員青睞的活性材料主要有碳納米管(CNT)、石墨烯、納米線、有機聚合物等; 其次,各課題組設計了不同的結構以實現柔彈性,如多層網狀陣列式結構和單層陣列式結構,基于“多孔PDMS”設計了新型多層“三明治”結構和空心球微結構等; 再次,近些年聚合物微機械加工工藝等新型制作方法和3D打印技術逐步興起,在部分領域顛覆了傳統的設計和制造方式,為電子皮膚觸覺傳感器的柔彈性的實現創造了新的可能:哈佛大學的Muth等[80](2014)利用3D打印技術,將特殊導電材料注入高分子彈性材料中,制作了拉伸率達到400%的應變式觸覺傳感器.早稻田大學Pu 等[81](2014)利用二氧化鉬特有的大帶隙、高有效載流子遷移率及高機械強度的特點,并結合化學汽相沉積法制作了柔彈性薄膜晶體管,可用于制作電子皮膚觸覺傳感器與可穿戴計算機等柔彈性要求較高的電子元器件.Zucca等[82](2015)基于卷對卷加工技術開發了具有超順應性的導電聚合物納米薄膜.該納米薄膜先從臨時基底剝落,然后可以覆蓋于任意形狀的物體表面.這種可以自由站立且超薄的導電薄膜具有不易察覺、成本低的特點,非常適合用于制作電子皮膚觸覺傳感器的電極,并可應用于運動、健康及醫療保健領域.但是,能夠貼合于復雜的三維靜/動態表面,并能準確完成測量任務的電子皮膚觸覺傳感器目前還非常少.
3.2 大面積電子皮膚觸覺傳感器可擴展性難題
人類皮膚是人體面積最大的器官,一個成年人的皮膚展開面積約2 m2,質量約為人體質量的1/20,厚度因人或部位而異,為0.5(如眼皮皮膚)~4 mm(如足底部皮膚).為了模擬人類皮膚,電子皮膚觸覺傳感器需要能夠任意剪裁和拼接同時保證正常工作,就必須具備良好的可擴展性[4,19,45,58].目前,經過各國研究人員的不斷努力,單個傳感單元的靈敏度、線性度、柔彈性等性能已經得到很大提升,但仿生機器人的表面積通常比較大,電子皮膚觸覺傳感器甚或傳感服裝通常都需要設計成陣列傳感器的形式才能完成檢測任務.單片面積為55 mm×50 mm~70 mm×70 mm擴展為大面積電子皮膚不僅要拼合電子皮膚觸覺傳感器的電極層、觸點位置的布置,并根據實際形狀對電子皮膚進行合理剪裁,還要求后續的信號處理電路相對簡單、易于陣列化,并優化電極布線方式,解決傳感器陣列相鄰傳感單元間的信號串擾問題.此外,仿生機器人連接部位的形狀復雜,這對觸覺傳感器可擴展性提出了更高的要求.
3.3 高靈敏度電子皮膚觸覺傳感器制造成本高
高靈敏度電子皮膚觸覺傳感器的制作通常涉及聚合物微加工、氧等離子體處理、電子束蒸鍍、磁控濺射等復雜的工藝和技術,相應的設備價格高昂; 另外制作電子皮膚觸覺傳感器的材料普遍比較昂貴,因而成本較高,還要考慮制作觸覺傳感器的時間成本,這也會大大增加觸覺傳感器的制作成本,從而限制了電子皮膚觸覺傳感器的大批量生產.最近,美國阿克倫大學Vatani等[83](2015)采用聚合物/納米復合材料開發的壓阻式的電子皮膚多層柔性觸覺傳感器,利用DP(Direct-Print)直接打印技術和層層軟成型工藝等混合制造工藝,為電子皮膚觸覺傳感器開發提供了富有前途的工具.隨著化學、材料科學和先進制造技術的進步,通過選取常見的和易于得到的材料,利用比較成熟的制作工藝和新穎先進制造技術,簡化傳感器陣列的結構等方法以降低電子皮膚的制造成本,使其大批量生產成為可能.
4 電子皮膚觸覺傳感器發展趨勢
近年來,得益于新材料和新工藝的出現[4,5,84],電子皮膚觸覺傳感器發展迅速,其性能在多方面已能模仿甚或超越人類皮膚,其研究成果已逐漸應用于生產生活、康復醫療等多領域.未來,電子皮膚觸覺傳感器應結合多學科知識向高柔彈性、高靈敏度、多功能、自愈合和自供電等方向發展,達到與人類皮膚更加近似的綜合感知觸覺性能,以適應復雜的外部環境[1-4,74-86].
4.1 高柔彈性、寬量程的高靈敏度與多功能
目前,電子皮膚觸覺傳感器通過采用新型柔性材料、多種傳感器陣列結構、新型制作工藝實現了柔性化,利用空心球微結構的鋸齒狀壓阻薄片或采用石墨烯、單壁碳納米管等材料可實現在較小量程壓力范圍內的高靈敏度,而兼具高柔彈性、寬量程的高靈敏度與多功能的電子皮膚可以更好地模仿人類皮膚,同時實現多維壓力[46,87-88]、溫度、濕度、表面粗糙度[89]等多種參數的實時檢測[90].但現有的觸覺傳感器陣列大部分功能單一,主要集中在壓力測量[19],只有少數具有可同時檢測拉力或溫度等參數的功能.因此,開發兼具高柔彈性、寬量程的高靈敏度與多功能的電子皮膚,使其更加接近甚至超越人類皮膚的性能是今后課題研究的重要努力方向,而觸覺傳感器都要求精簡布線方式,那么如何從采集到的數據中區分不同的激勵信號,是實現觸覺傳感器多功能的關鍵之一.
4.2 自愈合與自清潔
人類的皮膚具有自我修復機械損傷的能力,同樣具有自愈合能力的電子皮膚觸覺傳感器在仿生機器人、醫療保健及其他領域具有很高的實用價值,通過自體修復,可以延長觸覺傳感器的使用壽命,這一功能主要通過將自愈合的特性引入彈性材料來實現[34,61].盡管目前已經有研究人員實現了電子皮膚觸覺傳感器的自愈合,但是其穩定性和靈敏度都有待提高.此外,電子皮膚觸覺傳感器的自清潔功能也具有重要的意義,在機器人、醫療設備等領域具有廣闊的應用前景,但具有自清潔功能的電子皮膚觸覺傳感器目前還鮮有報道.
4.3 自供電與透明化
為電子皮膚觸覺傳感器提供便攜、可移動、并經久耐用的電源是一個難點,目前,已經發現太陽能電池、超級電容器、機械能量收割機、無線天線等很多先進的技術可以實現發電,并能將電能傳輸或儲存在彈性系統之中.未來,如何將這些技術應用于電子皮膚觸覺傳感器,實現能量自供給是一個巨大的挑戰.采用高透明度的PDMS等材料可實現電子皮膚觸覺傳感器的透明化,進而保證利用太陽能驅動的機械設備對光能的吸收,因此,透明化設計也是電子皮膚觸覺傳感器今后發展的重要趨勢.
電子皮膚觸覺傳感器還會不斷面臨新的挑戰,如生物適應性、生物降解能力、神經接口控制、高度集成化、微型化等方面也會成為未來的研究熱點.研制出性能優越,易于制作,成本低并能大批量生產的電子皮膚觸覺傳感器,使之有望走入人類生產生活各個領域,真正為人類服務,是今后的發展方向.
5 結 論
電子皮膚觸覺傳感器可應用于機器人、醫療健康、軍事、智能制造、汽車安全和日常生活等領域,具有廣泛應用前景.電子皮膚觸覺傳感器研究不僅要模擬人類皮膚的壓力、溫度、濕度、表面粗糙度等綜合感知的多功能,還應具有高柔性、高彈性、高靈敏度、高分辨率、透明化和輕量化等多方面的特性.近年來,各種傳感原理均已應用電子皮膚觸覺傳感器研究,并得益于新的敏感材料、新的傳感器結構和微結構以及納米制造、3D打印等先進技術的出現,電子皮膚觸覺傳感器在柔彈性化、透明化、高靈敏度以及多功能等方面已取得了突破性的研究進展,接近甚或超越了人類皮膚的部分特性.
電子皮膚觸覺傳感器的研究絕大部分還處在實驗室階段,并未真正投入應用服務人類社會.現有電子皮膚柔性觸覺傳感器的功能特性與人類皮膚的綜合感知依然存在很大差距,電子皮膚陣列觸覺傳感器還存在著難以兼顧高柔性和高彈性,大面積電子皮膚觸覺傳感器可擴展性差、不易剪裁和拼接,高靈敏度電子皮膚觸覺傳感器制造工藝復雜,成本高,難以大批量生產等問題,這都大大限制了電子皮膚的發展.
接觸壓力測量電子皮膚觸覺傳感器系統是最具挑戰性且應用潛力最大的領域,需要優先發展完善與應用,而多功能電子皮膚陣列觸覺傳感器可同時實現溫度、濕度、靈敏度、表面粗糙度等多種參數的實時檢測,需重點關注.未來,電子皮膚觸覺傳感器最重要的研究方向體現在兼具高柔彈性、寬量程的高靈敏度與多功能、自愈合與自清潔以及自供電與透明化.
[1] 王國彪,陳殿生,陳科位,等.仿生機器人研究現狀與發展趨勢[J].機械工程學報,2015,51(13):27-44.DOI:10.3901/JME.2015.13.027.
WANG Guobiao, CHEN Diansheng, CHEN Kewei, et al.The current research status and development strategy on biomimetic robot[J].Journal of Mechanical Engineering, 2015,51(13):27-44.DOI:10.3901/JME.2015.13.027.
[2] 吳偉國.面向作業與人工智能的仿人機器人研究進展[J].哈爾濱工業大學學報,2015,47(7):1-19.DOI:10.11918 /j.issn.0367-6234.2015.07.001.
WU Weiguo.Research progress of humanoid robots for mobile operation and artificial intelligence[J].Journal of Harbin institute of technology,2015,47(7):1-19.DOI:10.11918 /j.issn.0367-6234.2015.07.001.
[3] 蔡鶴皋.對我國機器人產業發展的思考[J].集成技術,2015,4(5):1-4.
CAI Hegao.Reflections on the development of robot industry in china[J].Journal of integration technology,2015,4(5):1-4.
[4] MALLORY L, HAMMOCK A C,BENJAMIN C, et al.25th anniversary article: the evolution of electronic skin (E-Skin): A brief history, design considerations, and recent progress[J].Advanced Materials, 2013,25(42):5997-6038.DOI:10.1002/adma.201302240.
[5] ROGERS J A,SOMEYA T,HUANG Y G.Materials and mechanics for stretchable electronics[J].Science, 2010,327(26):1603-1607.DOI:10.1126/science.1182383.
[6] XU Sheng,ZHANG Yihui,CHO Jiong,et al.Stretchable batteries with self-similar serpentine interconnects and integrated wireless recharging systems[J].Nature Communications,2013,1543(2013-02-26)[2016-01-07].http://www.nature.com/articles/ncomms2553.DOI: 10.1038/ncomms2553.
[7] XU Sheng,ZHANG Yihui,JIA Lin, et al.Soft microfluidic assemblies of sensors, circuits, and radios for the skin[J].Science, 2014, 344(6179):70-74.DOI: 10.1126/science.1250169.
[8] ARGALL B D, BILLARD A G.A survey of tactile human-robot interactions[J].Robotics and Autonomous Systems,2010,58(10): 1159-1176.DOI:10.1016/j.robot.2010.07.002.
[9] FRIGOLA M,CASALS A,AMAT J.Human-robot interaction based on a sensitive bumper skin[C]//Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems.Beijing: IEEE,2006:283-287.
[10]蔡鶴皋,王志孝,曲原.弧焊機器人觸覺智能的研究[J].哈爾濱工業大學學報,1985,17(增):63-70.
CAI Hegao, WANG Zhixiao, QU Yuan.On the research for tactile sensing intelligence of arc-welding robots[J].Journal of Harbin institute of technology,1985,17(S):63-70.
[11]IWATA H, HOSHINO H,MORITA T,et al.Human-humanoid physical interaction realizing force following and task fulfillment[C]//Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems.Takamatsu: IEEE,2000:522-527.
[12]LIPOMI D J, VOSGUERITCHIAN M, TEE B C K,et al.Skin-like pressure and strain sensors based on transparent elastic films of carbon nanotubes[J].Nature Nanotechnology,2011,6(12):788-792.DOI: 10.1038/NNANO.2011.184.
[13]黃英,葛運建.可連續檢測三維力的人工皮膚簡介[J].機器人技術與應用,2011(2):27-28.
HUANG Ying, GE Yunjian.Introduction of artificial skin with the function of continuous detection of three-dimensional force[J].Robot Technique and Application,2011(2):27-28.
[14]WANG Chuan,HWANG D,YU Zhibin,et al.User-interactive electronic skin for instantaneous pressure visualization[J].Nature Materials,2013,12(10):899-904.DOI: 10.1038/NMAT3711.
[15]RAMUZ M, TEE B C K, TOK J B H, et al.Transparent, optical, pressure-sensitive artificial skin for large-area stretchable electronics[J].Advanced Materials, 2012, 24(24):3223-3227.DOI: 10.1002/adma.201200523.
[16]丁俊香,葛運建,徐菲,等.基于導電橡膠的一種新型類皮膚觸覺傳感器陣列[J].傳感技術學報,2010,23(3):315-321.
DING Junxiang, GE Yunjian, XU Fei,et al.Study of a new type skin liked arrayed tactile sensor based on conductive rubber[J].Chinese journal of sensors and actuators,2010,23(3):315-321.
[17]黃英,陸偉,趙小文,等.用于機器人皮膚的柔性多功能觸覺傳感器設計與實驗[J].機器人,2011,33(3):347-353,359.DOI: 10.3724/SP.J.1218.2011.00347.
HUANG Ying,LU Wei,ZHAO Xiaowen, et al.Design and experiment of flexible multi-functional tactile sensors for robot skin[J].Robot,2011,33(3):347-353,359.DOI: 10.3724/SP.J.1218.2011.00347.
[18]張超然,劉婉姬,王立石,等.電子皮膚專利分析[J].中國發明與專利,2016(3):26-32.
ZHANG Chaoran, LIU Wanji, WANG Lishi, et al.Electronic skin patent analysis[J].China invention & patent, 2016(3):26-32.
[19]汪浩鵬.用于接觸壓力測量的新型高柔彈性電子皮膚研究[D].北京:北京科技大學,2015.
WANG Haopeng.Development of a skin-like pressure sensor array for e-skin application[D].Beijing:University of Science and Technology Beijing, 2015.
[20]呂曉洲,盧文科.用于電子皮膚的界面應力傳感器的研究[J].電子學報,2013,41(2):340-345.DOI:10.3969/ j.issn.0372-2112.2013.02.021.
Lü Xiaozhou, LU Wenke.Interfacial stress sensor for artificial skin application[J].Acta Electronica Sinica, 2013,41(2):340-345.DOI:10.3969/ j.issn.0372-2112.2013.02.021.
[21]石金進,吳海彬,馬志舉.一種新型機器人仿生皮膚的設計[J].機器人,2013,35(1):32-38.DOI:10.3724/SP.J.1218.2013.00032.
SHI Jinjin, WU Haibin, MA Zhiju.Design of a new robot skin[J].Robot, 2013, 35(1):32-38.DOI:10.3724/SP.J.1218.2013.00032.
[22]胡聞珊,黃英,王敏.機器人敏感皮膚的研究進展[J].合肥工業大學學報(自然科學版),2006,29(12):1624-1626.
HU Wenshan, HUANG Ying, WANG Min.Progress in the research on robot’s sensitive skin[J].Journal of Hefei University of Technology, 2006, 29(12):1624-1626.
[23]篠田 裕之.器用な手の皮膚と觸覚[J].日本ロボット學會誌, 2000,18(6):767-771.
[24]DAHIYA R S, METTA G, VALLE M, et al.Tactile sensing-from humans to humanoids [J].IEEE Transactions on Robotics,2010,26(1):1-20.DOI:10.1109/TRO.2009.2033627.
[25]GIRAO P S, RAMOS P M P, POSTOLACHE O, et al.Tactile sensors for robotic applications[J].Measurement,2013,46(3):1257-1271.DOI:10.1016/j.measurement.2012.11.015.
[26]CODY F W J, GARSIDE R A D, LLOYD D,et al.Tactile spatial acuity varies with site and axis in the human upper limb[J].Neuroscience Letters, 2008, 433(2):103-108.DOI:10.1016/j.neulet.2007.12.054.
[27]BENSMAIA S J, CRAIG J C, JOHANSON K O.Temporal factors in tactile spatial acuity: evidence for RA interference in fine spatial processing[J].Journal of Neurophsiology, 2006, 95(3):1783-1791.DOI:10.1152/jn.00878.2005.
[28]CRAIG J C, XU Baihua.Temporal order and tactile patterns[J].Perception & Psychophysics, 1990,47(1):22-34.DOI: 10.3758/BF03208161.
[29]JONES L A,LEDERMAN S J.“Tactile sensing” in human hand function[M].Cambridge: Oxford University Press, 2006:44-74.
[30]CODY F W J, IDREESA R, SPILIOTI D X,et al.Tactile spatial acuity is reduced by skin stretch at the human wrist[J].Neuroscience Letters,2010, 484(1):71-75.DOI:10.1016/j.neulet.2010.08.022.
[31]BHATTACHARJEE T, JAIN A, VAISH S, et al.Tactile sensing over articulated joints with stretchable sensors[C]//World Haptics Conference (WHC).Daejeon:IEEE,2013:103-108.
[32]HARMON L D.Automated tactile sensing[J].The International Journal of Robotics Research,1982,1(2):3-32.DOI:10.1177/027836498200100201.
[33]IWATA H, SUGANO S.Human-robot-contact-state identification based on tactile recognition[J].IEEE Transactions on Industrial Electronics,2005,52 (6):1468-1477.DOI:10.1109/TIE.2005.858739.
[34]PAN L J, CHORTOS A, YU G H, et al.An ultra-sensitive resistive pressure sensor based on hollow-sphere microstructure induced elasticity in conducting polymer film[J].Nature Communications,2014,5:1-8.DOI:10.1038/ncomms4002.
[35]LEE M H,NICHOLLS H R.Review article tactile sensing for mechatronics-a state of the art survey[J].Mechatronics,1999,9(1):1-31.DOI:10.1016/S0957-4158(98)00045-2.
[36]劉少強,黃惟一,王愛民,等.機器人觸覺傳感技術研發的歷史現狀與趨勢[J].機器人,2002,24(4): 362-366.
LIU Shaoqiang, HUANG Weiyi, WANG Aimin, et al.Overview and prospect of research and development on robot tactile sensory technology[J].Robot, 2002, 24(4): 363-366.
[37]黃英.基于壓力敏感導電橡膠的柔性多維陣列觸覺傳感器研究[D].合肥:合肥工業大學,2008.
HUANG Ying.Research on flexible multi-dimensional array tactile sensor based on pressure sensitive conduetive rubber[D].Hefei:Hefei University of Technology, 2008.
[38]呂曉洲.用于電子皮膚的新型壓力傳感器的研究[D].上海:東華大學,2012.
Lü Xiaozhou.Interfacial stress sensors for artificial skin application[D].Shanghai:Donghua University, 2012.
[39]GERRAT A P, SOMMER N, LACOUR S P, et al.Stretchable capacitive tactile skin on humanoid robot fingers-first experiments and results[C]//14th IEEE-RAS International Conference on Humanoid Robots.Madrid:IEEE,2014:238-245.
[40]CHO C, RYUH Y.Fabrication of flexible tactile force sensor using conductive ink and silicon elastomer[J].Sensors and Actuators A:Physical, 2016,237(1):72-80.DOI:10.1016/j.sna.2015.10.051.
[41]SOMEYA T, SEKITANI T, IBA S, et al.A large-area, flexible pressure sensor matrix with organic field-effect transistors for artificial skin applications[J].Proceedings of the National Academy of Sciences of the United States of America,2004,101(27):9966-9970.DOI:10.1073/pnas.0401918101.
[42]SOMEYA T, KATO Y, SEKITANI T, et al.Conformable, flexible, large-area networks of pressure and thermal sensors with organic transistor active matrixes[J].Proceedings of the National Academy of Sciences of the United States of America,2005, 102(35):12321-12325.DOI:10.1073/pnas.0502392102.
[43]OHMURA Y, KUNIYOSHI Y, NAGAKUBO A.Conformable and scalable tactile sensor skin for curved surfaces[C]//Proceedings of the 2006 IEEE International Conference on Robotics and Automation.Orlando: IEEE Press,2006:1348-1353.
[44]Lü X Z, KISHORE S R, ALEXANDER V M.Transfer function of interfacial stress sensor for artificial skin applications[J].IEEE Transactions on Electron Devices, 2013,60(8):2640-2647.DOI:10.1109/TED.2013.2270559.
[45]黃英,郭小輝,劉家俊,等.可拼接式全柔性電容觸覺陣列傳感器設計與實驗[J].機器人,2015,37(2):136-141,151.DOI:10.13973/j.cnki.robot.2015.0136.
HUANG Ying, GUO Xiaohui, LIU Jiajun, et al.Expandable fully compliant capacitive tactile sensing array: design and experiment[J].Robot, 2015,37(2):136-141,151.DOI:10.13973/j.cnki.robot.2015.0136.
[46]黃英, 明小慧, 向蓓,等.一種新型機器人三維力柔性觸覺傳感器的設計[J].傳感技術學報,2008,21(10):1696-1699.
HUANG Ying, MING Xiaohui, Xiang Bei, et al.A new design of flexible three-dimension force tactile sensor of robot[J].Chinese Journal of Sensors and Actuators, 2008, 21(10):1696-1699.
[47]董萬成,黃英,明小慧,等.一種新型柔性觸覺陣列傳感器信號處理電路設計[J].傳感器與微系統,2009,28(9):75-78.
DONG Wancheng, HUANG Ying, MING Xiaohui, et al.Design of signal processing circuit for new flexible tactile array sensor[J].Transducer and Microsystem Technologies, 2009,28(9):75-78.
[48]董萬成.柔性觸覺陣列傳感器的信號處理及其補償[D].合肥:合肥工業大學,2010.
DONG Wancheng.Flexible tactile sensor array signal processing and compensation[D].Hefei:Hefei University of Teehnology, 2010.
[49]TAKEI K,TAKAHASHI T,HO J C,et al.Nanowire active-matrix circuitry for low-voltage macroscale artificial skin[J].Nature Materials,2010,9(10):821-826.DOI:10.1038/NMAT2835.
[50]ZHANG X F,ZHAO Y L,ZHANG X L.Design and fabrication of a thin and soft tactile force sensor array based on conductive rubber[J].Sensor Review,2012,32(4):273-279.DOI 10.1108/02602281211257506.
[51]YING M, BONIFAS A P, LU N S, et al.Silicon nanomembranes for fingertip electronics[J].Nanotechnology,2012,23(34):1-7.DOI:10.1088/0957-4484/23/34/344004.
[52]YOGESWARAN N,TINKU S, KHAN S,et al.Stretchable resistive pressure sensor based on CNT-PDMS nanocomposites[C]//11th Conference on Ph.D.Research in Microelectronics and Electronics (PRIME).Glasgow:IEEE,2015:326-329.
[53]VATANI M, MOHAMAD V, CHOI J W.Multi-layer stretchable pressure sensors using ionic liquids and carbon nanotubes[J].Applied Physics Letters,2016,108(6):061908.1-5.
[54]ALIREZAEI H, NAGAKUBO A, KUNIYOSHI Y.A highly stretchable tactile distribution sensor for smooth surfaced humanoids[C]//7th IEEE-RAS International Conference on Humanoid Robots.Pittsburgh:IEEE Press,2007:167-173.
[55]WANG H P,ZHOU D B,CAO J G.Development of a stretchable conductor array with embedded metal nanowires[J].IEEE Transactions on Nanotechnology,2013,12(4):561-565.DOI:10.1109/TNANO.2013.2258172.
[56]WANG H P, ZHOU D B, CAO J G.Development of a skin-like tactile sensor array for curved surface[J].IEEE Sensors Journal, 2014,14(1):55-61.DOI:10.1109/JSEN.2013.2279394.
[57]孟軍輝.基于銀納米線的彈性電極研究[D].北京:北京科技大學,2016.
MENG Junhui.Stretchable conductor based on silver nanowires[D].Beijing:University of Science and Technology Beijing,2016.
[58]GEREON H B, RISTO K, CARSTEN S,et al.Flexible and stretchable fabric-based tactile sensor[J].Robotics and Autonomous Systems,2015,63(P3):244-252.DOI:10.1016/j.robot.2014.09.007.
[59]DOGRAMADZI S, VIRK G, BELL G, et al.Recording forces exerted on the bowel wall during colonoscopy: in vitro evaluation[J].The International Journal of Medical Robotics and Computer Assisted Surgery, 2005,1(4):89-97.DOI: 10.1002/rcs.61.
[60]TEE B C, WANG C, ALLEN R,et al.An electrically and mechanically self-healing composite with pressure-and flexion-sensitive properties for electronic skin applications[J].Nature nanotechnology, 2012,7(12):825-832.DOI:10.1038/NNANO.2012.192.
[61]BENIGHT S J, WANG C, TOK J B, et al.Stretchable and self-healing polymers and devices for electronic skin[J].Progress in Polymer Science,2013,38(12):1961-1977.DOI:10.1016/j.progpolymsci.2013.08.001.
[62]WANG J, JIU J T, NOGI M,et al.A highly sensitive and flexible pressure sensor with electrodes and elastomeric interlayer containing silver nanowires[J].Nanoscale,2015,7(7):2926-2932.DOI: 10.1039/c4nr06494a.
[63]WANG X W, GU Y, XIONG Z P, et al.Silk-molded flexible, ultrasensitive, and highly stable electronic skin for monitoring human physiological signals[J].Advanced Materials, 2014,26(9):1336-1342.DOI: 10.1002/adma.201304248.
[64]LOU Z, CHEN S,WANG L L, et al.An ultra-sensitive and rapid response speed graphene pressure sensors for electronic skin and health monitoring[J].Nano Energy, 2016, 23:7-14.DOI:10.1016/j.nanoen.2016.02.053.
[65]JOO Y, BYUN J, SEONG N,et al.Silver nanowire-embedded PDMS with a multiscale structure for a highly sensitive and robust flexible pressure sensor[J].Nanoscale,2015,7(14):6208-6215.DOI: 10.1039/c5nr00313j.
[66]LAI Y C, YE B W, LU C F, et al.Extraordinarily sensitive and low-voltage operational cloth-based electronic skin for wearable sensing and multifunctional integration uses:a tactile-induced insulating-to-conducting transition[J].Advanced Functional Materials,2016,26(8):1286-1295.DOI:10.1002/adfm.201503606.
[67]VIRY L, LEVI A, TOTARO M, et al.Flexible three-axial force sensor for soft and highly sensitive artificial touch[J].Advanced Materials,2014,26(17):2659-2664.DOI: 10.1002/adma.201305064.
[68]TIAN H,SHU Y,WANG X F,et al.A graphene-based resistive pressure sensor with record-high sensitivity in a wide pressure range[J].Scientific Reports,2015,8603.(2015-02-27)[2016-01-07].http://www.nature.com/articles/srep08603.DOI: 10.1038/srep08603.
[69]MORTEZA A, AEKACHAN P, SANGJUN L, et al.Highly stretchable and sensitive strain sensor based on silver nanowire elastomer nanocomposite[J].ACS Nano, 2014,8(5):5154-5163.DOI:10.1021/nn501204t.
[70]ISHIKAWA M, SHIMOJO M.A method for measuring the center position of a two dimensional distributed load using pressure conductive rubber[J].The Society of Instrument and Control Engineers, 1982, 18(7):730-735.DOI: 10.9746/sicetr1965.18.730.
[71]DAISUKE G, YOSHITOMO M, SEIICHI T,et al.Grasping force control of multi-fingered robot hand based on slip detection using tactile sensor[C]//SICE Annual Conference.Tokyo:IEEE,2008:894-899.
[72]PARK J, LEE Y, HONG J, et al.Tactile-direction-sensitive and stretchable electronicskins based on Human-Skin-Inspired interlocked microstructures[J].ACS Nano, 2014,8(12):12020-12029.DOI:10.1021/nn505953t.
[73]PARK J, LEE Y, HONG J,et al.Giant tunneling piezoresistance of composite elastomers with interlocked microdome arrays for ultrasensitive and multimodal electronic skins[J].ACS Nano, 2014,8(5):4689-4697.DOI:10.1021/nn500441k.
[74]趙杰.我國工業機器人發展現狀與面臨的挑戰[J].航空制造技術,2012(12):26-29.
ZHAO Jie.Development and challenge of chinese industrial robot[J].Aeronautical Manufacturing Technology,2012(12):26-29.
[75]曲道奎.中國機器人產業發展的機遇與挑戰[J].科協論壇,2015,30(12):15-17.
QU Daokui.Opportunities and challenges of China's robot industry[J].Science & Technology Association Forum,2015,30(12):15-17.
[76]王田苗,陳殿生,陶永,等.改變世界的智能機器:智能機器人發展思考[J].科技導報,2015,33(21):16-22.
WANG Tianmiao, CHEN Diansheng, TAO Yong, et al.Intelligent machines that will change the world: Thinking on the development of intelligent robots[J].Science & Technology Review,2015,33(21):16-22.
[77]喬紅, 尹沛劼, 李睿, 等.機器人與神經科學交叉的意義:關于智能機器人未來發展的思考[J].中國科學院院刊,2015,30(6):762-771.DOI:10.16418/j.issn.1000-3045.2015.06.007.
QIAO Hong, YIN Peijie, LI Rui,et al.What is the meaning for the interdisciplinary research of robot and neuroscience: thoughts on the future development of intelligent robot[J].Bulletin of Chinese Academy of Sciences,2015,30(6):762-771.DOI:10.16418/j.issn.1000-3045.2015.06.007.
[78]劉辛軍,于靖軍,王國彪,等.機器人研究進展與科學挑戰[J].中國科學基金,2016(5):425-431.
LIU Xinjun, YU Jingjun, Wang Guobiao, et al.Research trend and scientific challenge of robotics[J].Bulletin of National Nature Science Foundation of China, 2016(5):425-431.
[79]ZHAO J D, JIANG L, CAI H G, et al.A five-fingered underactuated prosthetic hand:hardware and its control scheme[J].Journal of Harbin Institute of Technology,2008,15(2):228-234.
[80]MUTH J T, VOGT D M, TRUBY R L, et al.Embedded 3D printing of strain sensors within highly stretchable elastomers[J].Advanced Materials, 2014, 26(36):6307-6312.DOI:10.1002/adma.201400334.
[81]PU J, LI L J, TAKENOBU T.Flexible and stretchable thin-film transistors based on molybdenum disulphide[J].Physical Chemistry Chemical Physics,2014,16(29):14973-15718.DOI: 10.1039/c3cp55270e.
[82]ZUCCA A, YAMAGISHI K,FUJIE T, et al.Roll to roll processing of ultraconformable conducting polymer nanosheets[J].Journal of Materials Chemistry C,2015,3(25):6539-6548.DOI: 10.1039/C5TC00750J.
[83]VATANI M, ENGEBERG E D,CHOI J W.Conformal direct-print of piezoresistive polymer/nanocomposites forcompliant multi-layer tactile sensors [J].Additive Manufacturing, 2015,7(7):73-82.DOI:10.1016/j.addma.2014.12.009.
[84]XU Feng, ZHU Yong.Highly conductive and stretchable silver nanowire conductors[J].Advanced Materials, 2012,24(37):5117-5122.DOI:10.1002/adma.201201886.
[85]曹建國,廖然,楊利花.燃料電池電動汽車發展現狀與前景[J].新材料產業,2015(4):58-63.
CAO Jianguo, LIAO Ran, YANG Lihua.Development situation and prospect of fuel cell electric vehicles[J].Advanced Materials Industry, 2015(4): 58-63.
[86]曹建國,唐慧,楊光輝,等.有高溫相變的電工鋼熱軋起浪的有限元分析[J].哈爾濱工業大學學報, 2016,48(1):146-151.DOI:10.11918/j.issn.0367-6234.2016.01.022.
CAO Jianguo, TANG Hui, YANG Guanghui, et al.Finite element analysis of edge wave for non-oriented electrical strip with high temperature phase transition[J].Journal of Harbin institute of technology, 2016,48(1):146-151.DOI:10.11918/j.issn.0367-6234.2016.01.022.
[87]王菲露.基于神經網絡方法的三維力柔性觸覺傳感器陣列解耦研究[D].合肥:中國科學技術大學, 2014.
WANG Feilu.Decoupling research of three-dimensional force flexible tactile sensor array based on neural network methods[D].Hefei:University of Science and Technology of China, 2014.
[88]許德成,郭小輝.用于仿生皮膚的電容式三維力觸覺感知系統[J].吉林大學學報(信息科學版), 2015,33(6):652-657.
XU Decheng, GUO Xiaohui.Capacitive three-dimensional force tactile perception system for artificial skin[J].Journal of Jilin University ( Information Science Edition), 2015,33(6):652-657.
[89]陶鏞汀,周俊,孟一猛,等.果蔬表面粗糙度特性檢測觸覺傳感器設計與試驗[J].農業機械學報, 2015,46(11):16-21.DOI:10.6041/j.issn.1000-1298.2015.11.003.
TAO Yongting, ZHOU Jun, MENG Yimeng, et al.Design and experiment of tactile sensors for testing surface roughness of fruits and vegetables[J].Transactions of the Chinese Society for Agricultural Machinery, 2015,46(11):16-21.DOI:10.6041/j.issn.1000-1298.2015.11.003.
[90]張庭.仿人型假手指尖三維力觸覺傳感器及動態抓取研究[D].哈爾濱:哈爾濱工業大學, 2014.
ZHANG Ting.Research on fingertip three-dimensional force tactile sensor and dynamic grasp for anthropomorphic prosthetic hand[D].Harbin:Harbin Institute of Technology, 2014.
(編輯 楊 波)
封面圖片說明
封面圖片來自本期論文“電子皮膚觸覺傳感器研究進展與發展趨勢”,是北京科技大學曹建國教授課題組制作完成的電子皮膚觸覺陣列傳感器及其高柔彈性的展示。該課題組提出了一種基于“多孔PDMS”和AgNWs/PDMS納米復合材料導電薄膜電極層的新型多層“三明治”式壓力傳感器陣列結構.采用了納米制造、電子束蒸鍍、磁控濺射、氧等離子體處理、3D打印、仿生設計和有限元仿真等先進制造技術,研制出新型高柔彈性電子皮膚觸覺陣列傳感器.首先,制作基于納米復合材料的柔彈性導電薄膜電極層;其次,利用力敏導電壓阻橡膠開發了柔性壓阻式壓力傳感器陣列;然后,采用多孔PDMS及力敏導電壓阻橡膠制作柔彈性中間傳感層;隨后,設計采用新型多層"三明治"式壓力傳感器陣列結構等制作電子皮膚觸覺陣列傳感器;最后,實現傳感器陣列的封裝、拼合和裁剪,實現其可擴展性。這種電子皮膚觸覺傳感器空間分辨率達到4.5 mm×6.0 mm,可測量動態壓力頻率>5 Hz,具有高柔性、高彈性,其拉伸率可達到30%,超越了人類皮膚最大的拉伸率,還能在0~180 kPa大量程范圍內實現高精度的測量,可擴展性好,性能穩定,可實現復雜表面或活動關節等的動態測量。
(圖文提供: 曹建國, 周建輝, 繆存孝, 尹海斌, 李維奇, 夏 飛. 北京科技大學 機械工程學院)
Research progress and development strategy on tactile sensors for e-skin
CAO Jianguo1,2, ZHOU Jianhui1,3, MIAO Cunxiao1, YIN Haibin4, LI Weiqi1, XIA Fei1
(1.School of Mechanical Engineering, University of Science and Technology Beijing, Beijing 100083, China;2.Jacobs School of Engineering, University of California-San Diego, San Diego 92093, USA;3.Qianan College, North China University of Science and Technology, Tangshan 064400, Hebei, China;4.School of Mechanical and Electrical Engineering, Wuhan University of Technology, Wuhan 430070, China)
Starting from the tactile sensing performance of human skin, the progress and key technologies of tactile sensors for e-skin (electronic skin) akin to human skin by multidisciplinary fields are comprehensively reviewed.The sensing principle, new materials and structures, advanced design and making methods, sensing characteristics and performance of tactile sensors are analyzed.The recent domestic and foreign research advances of electronic skin tactile sensor array in flexibility, elasticity, spatial resolution, sensitivity, fast response, transparency, lightweight, multifunction and other aspects are summarized.It is difficult to achieve the tactile sensors for e-skin with high stretchable and flexible, less complex production process for high sensitivity e-skin, strong extensibility and low cost.The tactile sensors for e-skin can be widely used in robotics, medical health, aeronautics and space military, intelligent manufacturing, automotive security and other fields.The development of tactile sensors for e-skin toward the direction of high stretchable and flexible, high sensitivity in wide range, multifunction, self-healing and self-cleaning, self-powered and transparent, has been pointed out.
e-skin; sensor; stretchable and flexible; tactile; bionic robot
10.11918/j.issn.0367-6234.2017.01.001
2016-03-02
國家留學基金委公派高級研究學者項目(201308110343); 中央高校基本科研業務費專項(FRF-BR-15-038A)
曹建國(1971—), 男, 教授, 博士生導師
曹建國, geocao@ustb.edu.cn
TP212
A
0367-6234(2017)01-0001-13
