純電動車用無刷直流電機控制系統的設計
2017-01-16 10:20:06周衛明張向文
桂林電子科技大學學報 2016年5期
周衛明,張向文,2
(1.桂林電子科技大學電子工程與自動化學院,廣西桂林 541004;2.桂林電子科技大學廣西自動檢測技術與儀器重點實驗室,廣西桂林 541004)
純電動車用無刷直流電機控制系統的設計
周衛明1,張向文1,2
(1.桂林電子科技大學電子工程與自動化學院,廣西桂林 541004;2.桂林電子科技大學廣西自動檢測技術與儀器重點實驗室,廣西桂林 541004)
針對純電動汽車用無刷直流電機(BLDCM)控制系統的要求,設計了一款以TMS320F2812為核心的控制系統。控制系統利用DSP產生的6路PWM信號實時調控電機轉動,并通過占空比實現高精度轉速調節。系統軟件采用中斷方式編程。測試結果表明,本控制系統的響應速度快,轉速穩定,且穩態誤差小。
無刷直流電機;TMS320F2812;控制系統
電動汽車具有行駛噪聲低、能量利用效率高、無污染物排放等優點。隨著傳統資源日益枯竭、環境污染加劇,電動汽車必將成為人們生活中必不可少的綠色交通工具。無刷直流電機具有結構簡單、運行可靠和維護方便等優點,是一種理想的變速電機,在電動汽車領域應用廣泛[1-3]。由于無刷直流電機控制系統較復雜,且穩定性要求較高,常采用數字信號處理器DSP等高端芯片設計控制器[4-5]。信號處理器DSP是一種可實現實時信號處理的微處理器,具有豐富的I/O接口、PWM輸出、可實現復雜的控制算法等功能。段麗娜等[6]對控制系統的硬件結構進行了設計,完成了PWM波形的測試,但未對整個系統進行測試;劉明等[7]研究了自適應模糊PID控制算法在無刷直流電機控制中的應用,但只進行了Simulink仿真分析,未進行實際電機控制器測試;崔方等[8]以dsPIC30F4012為控制核心設計了電動汽車用BLDCM控制系統,控制系統采用了PID控制算法,轉矩波動大。為此,采用專用芯片TMS320F2812設計了純電動車用無刷直流電機控制系統,以滿足實時性好、精度高、穩定性好的要求。
1 系統總設計框圖
控制系統整體框架如圖1所示。控制系統主要包括DSP2812主控模塊、PWM信號處理模塊、驅動電路、功率電路、電池電壓檢測、母線電流采樣、電源電路、轉把信號采集、轉子位置信號處理。其中,DSP2812主控模塊的事務管理器EVA的比較單元產生PWM信號,捕獲模塊獲取轉子位置傳感器的電平狀態,根據霍爾傳感器輸出的電平狀態控制電機換相;PWM信號處理模塊對PWM信號進行隔離處理;驅動電路根據PWM信號控制功率電路的導通;母線電流采樣實現電流檢測和過流保護功能;轉子位置信號處理實現對霍爾傳感器輸出的電平信號的整形處理。
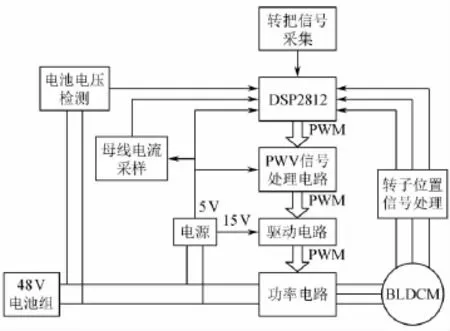
圖1 控制系統總體框架Fig.1 The framework of control system
2 硬件電路設計
2.1 PWM信號隔離電路設計
控制電路輸出的PWM信號用于控制功率電路的導通。為防止高電壓、大電流信號對PWM信號的干擾,提高PWM信號驅動負載的能力,對PWM信號進行了隔離處理。本設計采用光電隔離芯片6N137,光耦隔離電路如圖2所示。PWM信號從6N137的2號引腳輸入,輸出端經過上拉電阻R29上拉,輸出隔離后的PWM信號。

圖2 光耦隔離電路Fig.2 The optocoupler isolation circuit
2.2 驅動電路設計
經過光耦隔離后的PWM信號不能直接作為驅動功率電路的開關信號,需經過驅動電路的變換。本控制系統采用了IR2136芯片構成的集成式驅動電路。IR2136為高功率、高速的MOSFET和IGBT驅動器,有3對獨立的高壓側和低壓側輸出通道為三相所應用,采用自舉電壓技術,實現了對功率電路的驅動。
驅動電路如圖3所示。ITRIP引腳為IR2136芯片的過流檢測引腳,由芯片內部結構決定。當ITRIP引腳的電壓低于0.5V時,電路正常工作。當ITRIP引腳的電壓高于0.5V時,電路過流,此時芯片內部產生2路信號:1)使FAULT引腳輸出為低電平,FAULT引腳與DSP2812的外部中斷引腳連接,產生中斷,禁止控制芯片的PWM信號輸出;2)關斷上橋臂的3路MOSFET管,使電機停止轉動,同時對電路起保護作用。電路中的二極管為快恢復二極管,電容C49為鉭電容,起自舉升壓的作用。
2.3 轉子位置信號檢測處理電路設計
無刷直流電機自帶電機轉子位置傳感器,利用霍爾效應檢測電機磁極的位置。電機轉子位置信號處理電路如圖4所示。霍爾信號經過施密特觸發器74HC14整形,再經濾波電容濾波,消除信號中的噪聲,得到5V的霍爾反饋輸出信號。由于DSP2812的端口輸入電壓小于3.2V,5V的霍爾反饋信號需要經過電阻的分壓處理,圖4中的R10和R18實現了分壓。
2.4 電流采樣電路設計
通過電流采樣電路的采樣,得到電路實際的電流值。根據電機的運動狀態,通過電流環更新PWM波形的輸出,控制電機的運動狀態。電機在超過額定電流的條件下工作時間過長會燒壞電路中的元器件,因此,應時刻監測電路中的電流。
本控制系統采用電阻電流采樣法,選取10mΩ的康銅絲電阻,將采集電路中的電流轉變為電壓。電流采樣電路如圖5所示。PV-是功率電路MOSFET源極引出節點,R33采樣電阻兩端的電壓先經過R26和C43組成的濾波電路濾波,進入LM358運算放大器進行信號放大處理。電路采用了二級運算放大,R24是阻值為1kΩ的電阻,R22為20kΩ的可調電阻。另外,DSP2812的ADC的模擬電壓信號采樣范圍為0~3V,調節可變電阻R21和R22,所得到的采樣電壓信號可直接接入到DSP2812的ADC采集引腳。

圖3 驅動電路Fig.3 The drive circuit

圖4 電機轉子位置信號處理電路Fig.4 The rotor position signal processing circuit

圖5 電流采樣電路Fig.5 The current sampling circuit
2.5 調速信號采集電路設計
在外部接入的調速信號,實現對電機速度的自動調節。通過控制系統模擬信號采集ADC接口,對外部輸入的模擬電壓信號進行采集,與電機給定轉速值相對應,實現電機的調速。調速信號采集電路如圖6所示。調速信號從P10接口接入,從3號引腳輸出0.528~4.52V的線性電壓。通過R19和R20的分壓,把所得到的電壓接入到DSP2812的ADC引腳。
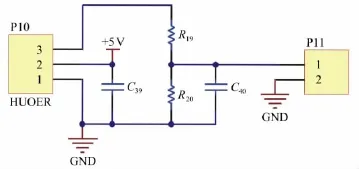
圖6 調速信號采集電路Fig.6 The speed signal sampling circuit
3 軟件程序設計
軟件系統主要由一個主程序和一個中斷子程序組成。其主要包括霍爾位置檢測程序、速度計算程序、位置采樣程序、控制算法程序、ADC采樣程序、斜坡控制計算程序、PWM產生程序、PWM輸出程序、串口轉速輸出程序。
3.1 主程序設計
主程序主要完成系統初始化,主程序流程圖如圖7所示。主程序的主要功能:1)引用頭文件,定義需要的常量、變量,定義功能模塊;2)對DSP系統進行初始化,產生內部工作時鐘;3)關閉系統的總中斷,初始化中斷向量表,對終端進行配置,對事務管理器及功能模塊參數初始化;4)使能中斷,讓程序進入循環等待,等待中斷程序運行。

圖7 主程序流程圖Fig.7 The flow chart of main program
3.2 中斷子程序設計
從實際程序功能來看,中斷程序調用了所有函數控制電機的運動狀態。根據電機狀態運行的過程,在中斷子程序中先后對各個函數進行調用,即對電機所需要的狀態值調整。中斷子程序流程圖如圖8所示。首先調用ADC采集函數,一個通道檢測電路中的電流值作為電流環的電流實際值,另一個通道檢測外部轉速給定值,給定值代表電機的給定轉速,表示所設定的電機轉速;再調用斜坡控制函數,用于PWM波占空比由零逐漸增大,控制電機軟啟動;調用霍爾檢測函數,檢測轉子的位置狀態;調用計數器函數,記錄電機轉子的位置狀態;調用斜坡控制函數,防止控制采集所給定的電機轉速參考值的突變,起緩沖作用;調用速度計算函數,計算電機實際轉速;調用雙閉環滑模PID控制函數,輸出PWM波的比較值;調用PWM信號產生函數,根據所得到的PWM比較單元的比較值更新PWM波形占空比輸出。中斷子程序運用了事務管理器EVA定時器2的周期中斷,中斷頻率設置為20kHz。
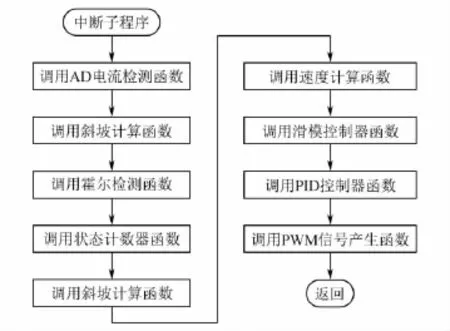
圖8 中斷子程序流程圖Fig.8 The flow chart of interrupt program
4 試驗結果與分析
在完成系統的軟硬件設計后,將控制器與電池、電機連接,搭建實驗平臺,電機控制系統實物圖如圖9所示。本驅動控制系統選用浙江尤耐特電機公司生產的無刷直流電動機,其額定功率為1.5kW,額定電壓為48V,額定電流為39A。

圖9 電機控制系統實物圖Fig.9 The physical map of motor control system
在電機的啟動、加速、減速過程中,電機的轉速波形如圖10~12所示。圖10為給定轉速1400r/min的電機啟動過程轉速波形;圖11為轉速500~1500 r/min的電機加速過程轉速波形;圖12為速度1500~800r/min的電機減速過程轉速波形。從圖10~12可看出,本控制系統的響應速度快,轉速穩定,且穩態誤差小。
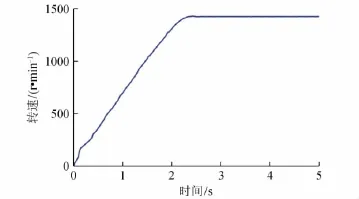
圖10 電機啟動過程轉速波形Fig.10 The speed waveform of motor starting process

圖11 電機加速過程轉速波形Fig.11 The speed waveform of motor acceleration process
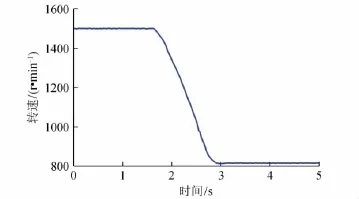
圖12 電機減速過程轉速波形Fig.12 The speed waveform of motor deceleration process
5 結束語
針對純電動汽車用無刷直流電機(BLDCM)控制系統的要求,以TMS320F2812為核心,設計并實現了無刷直流電機控制系統。系統圍繞DSP2812進行了硬件電路的設計,并根據硬件結構進行軟件設計。利用了高性能的DSP2812芯片進行全數字化精確控制策略控制,既簡化了傳統的復雜硬件電路連接,又大幅提高了系統的可靠性。實驗測試表明,基于TMS320F2812設計的純電動汽車用無刷直流電機控制系統具有良好的動態性能,響應速度快,轉速穩定,且穩態誤差小。
[1] XIA C L,XIAO Y W,CHEN W,et al.Torque ripple reduction in brushless DC drives based on reference current optimization using integral variable structure control[J].IEEE Transaction Industrial Electronics,2014,61(2):738-752.
[2] 汪俊杰,周波.基于前饋控制的BLDCM滑模變結構調速系統[J].電工技術學報,2008,23(8):41-46.
[3] 李曉飛,趙敏,劉新妹,等.基于DSP的平面電機控制系統設計[J].微特電機,2013,44(9):50-52.
[4] 張深.無刷直流電動機與原理及應用[M].北京:機械工業出版社,2001:57-62.
[5] 夏長亮.無刷直流電機控制系統[M].北京:科學出版社,2009:182-196.
[6] 段麗娜,趙金.基于DSP的無刷直流電機控制系統的研究[J].微電機,2014,47(3):60-63.
[7] 劉明,宋弘.自適應模糊PID智能控制器在無刷直流電機速度控制系統中的應用[J].電機與控制應用,2012,39(11):22-25.
[8] 崔方,劉芳華,邱忠華,等.基于DSP的電動車用無刷直流電機控制器的設計[J].電機與控制應用,2014,41(4):52-56.
編輯:翁史振
BLDCM control system for pure electric vehicle
ZHOU Weiming1,ZHANG Xiangwen1,2
(1.School of Electronic Engineering and Automation,Guilin University of Electronic Technology,Guilin 541004,China;2.Guangxi Key Laboratory of Automatic Detecting Technology and Instruments,Guilin University of Electronic Technology,Guilin 541004,China)
According to the requirement of brushless direct current motor(BLDCM)control system for pure electric vehicle,a control system with TMS320F2812is designed.Six channel PWM signals are generated by DSP to control the rotation of the motor,and the high precision speed regulation is realized through the variation of duty cycle.The system software adopts interrupt programming.The test results show that the response of the control system is fast,the speed is stable,and the steady state error is small.
brushless direct current motor;TMS320F2812;control system
TM351
:A
:1673-808X(2016)05-0391-05
2016-02-26
國家自然科學基金(51465011);廣西自然科學基金(2014GXNSFAA118377);廣西自動檢測技術與儀器重點實驗室基金(YQ14111)
張向文(1976-),男,河南南陽人,研究員,博士,研究方向為汽車電子、智能控制與信號處理。E-mail:zxw@guet.edu.cn
周衛明,張向文.純電動車用無刷直流電機控制系統的設計[J].桂林電子科技大學學報,2016,36(5):391-395.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
中國生殖健康(2019年3期)2019-02-01 06:12:26
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00