基于FMCW雷達測距的車輛防碰撞系統
2017-01-16 10:19:54劉軍輝陳宏濱
桂林電子科技大學學報 2016年5期
劉軍輝,陳宏濱
(桂林電子科技大學信息與通信學院,廣西桂林 541004)
基于FMCW雷達測距的車輛防碰撞系統
劉軍輝,陳宏濱
(桂林電子科技大學信息與通信學院,廣西桂林 541004)
針對交通事故頻發、駕駛員遇到潛在碰撞反應不及時,設計了一種基于雷達測距的車輛防碰撞系統。該系統以24 GHz雷達傳感器為前端信號收發模塊,浮點DSP芯片作為數據采樣和處理核心,實時監測前車的距離和速度。雷達采用連續三角波調頻方式,利用Chirp-Z算法對雷達差頻信號進行頻譜細化,以提高測距精度。仿真結果表明,本系統能精確獲取前車距離及相對速度,實現安全預警。
車輛防碰撞;24GHz雷達;浮點DSP;三角波調頻;安全預警
隨著人們生活水平的提高,汽車也越來越普及,逐漸成為出行的主要交通工具。但汽車給人們帶來便利的同時,也帶來了許多傷害。伴隨著公路上的汽車越來越多,交通事故也越來越頻發。據統計,中國的交通事故率高居世界第一,每年交通事故50萬起以上,因道路交通安全事故傷亡人數超過20萬人。對公路交通事故的分析表明,80%以上的交通事故由司機反應不及時引起,65%的車輛相撞屬于追尾相撞[1]。研究同時表明,若司機能夠提前1~2s意識到危險情況并采取相應的安全措施,則絕大多數交通事故都可避免[2]。因此,如何在公路上安全行車和保障人們的生命財產安全,成為全社會廣泛關注的焦點問題。安全帶、安全氣囊等傳統被動安全設施在性能上已無更多創新,汽車主動安全相關技術則越來越受到汽車廠商的重視,各種汽車主動安全設備及系統的投入使用為保證車輛的安全行駛做出了重大貢獻。汽車防撞雷達系統作為汽車主動安全的重要部分已成為主要的研究對象[3]。
汽車防撞雷達系統研究始于20世紀60年代,早期由于元器件的限制,發展非常緩慢。近年來,隨著集成電路的快速發展和智能交通在全球的興起,汽車防撞雷達系統受到越來越多的關注[4]。國際上對汽車防撞雷達系統的研究主要集中在美國、歐洲和日本等發達國家,各大汽車公司積極參與研究,先后成功研制出多種不同頻段的汽車防撞雷達系統,并已投入商用。國內對汽車防撞雷達系統的研究起步較晚,目前主要為一些高校和科研機構參與研究,還處于初期階段[5]。
根據工作原理不同,汽車防撞雷達主要分為紅外雷達、超聲波雷達、激光雷達和毫米波雷達。紅外雷達光線傳播不易擴散,環境適應性強,能全天候工作,且紅外雷達系統制作成本低廉;但是紅外雷達測距范圍有限,只能適用短距離目標,測距范圍限制了其在汽車防撞方面的應用。超聲波雷達測距原理簡單,成本低且制作方便,但超聲波的速度容易受外界環境影響,在不同溫度下,超聲波的速度表現不一;同時,超聲波能量衰減較大,距離越遠,反射的信號越微弱,靈敏度下降很快,故只適合近距離測量。激光雷達測距范圍大、測距時間短、測距精度高,但是在高速移動的汽車上容易發生幅度振動,同時激光在霧天容易被吸收且激光對人眼有害,這些不利因素限制了激光雷達在汽車防撞雷達系統的應用。毫米波雷達在汽車防撞系統中具有以下優點:1)探測性能穩定,受雨、雪、霧、強光、污塵等環境因素影響較少;2)波長短、多普勒頻移大,相對速度的測量精度較高[6]。鑒于此,設計了一種基于FMCW(frequency modulation continuous wave)雷達測距的汽車主動安全系統。
1 FMCW雷達測距基本原理
FMCW雷達通過發射天線向前方發射調頻連續波信號,并接收目標的反射信號來測量目標的距離和相對速度。靜止目標下,反射信號和發射信號的波形相同,僅僅在時間上滯后Δt,靜止目標FMCW雷達的工作方式如圖1所示,FMCW雷達的調制信號為三角波調制。Δt與目標距離R的關系為

其中c為光速。反射信號與發射信號差頻,得到一個差頻信號Δf,由于Δt非常小,通常情況下將Δt轉換到差頻信號Δf上進行測量。

圖1 靜止目標FMCW雷達工作方式Fig.1 FMCW radar work under stationary target
由圖1中的三角關系可得,

將式(2)代入式(1)中可得,

其中:T為調頻連續波周期;B為調頻帶寬。由式(3)可知,Δf中包含目標的距離信息,只需對差頻信號Δf進行處理,即可測量目標的距離R。
運動目標FMCW雷達工作方式如圖2所示。當所測目標與車載雷達間存在相對速度時,接收的回波信號的載波相對于發射信號載波將產生一個頻移,該頻移即為多普勒頻移,其值為

其中:fd為多普勒頻移;λ為載波波長;vr為所測目標與雷達的相對速度[7]。

圖2 運動目標FMCW雷達工作方式Fig.2 FMCW radar work under moving target
在運動目標情況下,調制三角波的上掃描和下掃描段輸出的差頻頻率分別為:

結合式(3)、(4),目標的距離和相對速度分別為:

通過以上分析,只需在一個三角波調制周期內分別計算出上掃描差頻fb+和下掃描差頻fb-,便可獲取當前時間前車的相對速度和距離。
2 安全距離模型
安全車距是指同一車道同向行駛的相鄰車輛為保證行車安全而必須保持的行車距離。若相鄰車輛的行車間距保持在安全車距以上,則很難發生追尾類安全交通事故。臨界安全車距是指為保證車輛安全行駛而必須保持的最小車距。安全車距與很多因素有關,包括行車環境、車輛性能、駕駛員的反應速度等[7]。常用的安全車距模型有直接限定模型、車頭時距模型、駕駛員預估模型[8]。
考慮只有在本車速度v1大于前車速度v2時,才可能發生相撞。因而本系統將安全距離模型簡化為v1減速到與v2相等時,若碰撞未發生,則碰撞可以避免。車輛的安全距離模型如圖3所示。
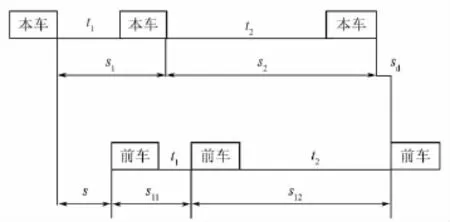
圖3 安全距離模型Fig.3 Safety distance model
設s為本車和前車的安全車距,t1為本車駕駛員反應及汽車剎車系統延遲時間,t2為本車減速到與前車速度相等所需時間,sd為減速至兩車相對靜止時的車距。在t1時間段,前車和本車都保持當前的速度運動,本車行駛距離為

前車行駛距離為

在t2時間段,本車減速,前車仍然保持速度v2,且在t2時間內,本車速度由v1減至v2,考慮為勻減速,本車的最大減速度為amax。根據運動學知識,

在減速階段t2時間內,本車行駛距離為

前車行駛距離為

減速完成后,需保持兩車的跟車距離sd,

其中:M為跟車系數,通常由經驗得到;s0為最小停車距離,通常規定為2m[9]。
參考圖3的安全距離模型,安全行車距離

結合式(9)~(14),式(15)可以簡化為

其中,Δv=v1-v2為相對速度。根據以上分析可知,安全行車距離主要由Δv決定。將防撞雷達系統所測的距離R與安全距離s對比,若R≤s,則表明當前處于危險狀態,系統自動報警。
3 系統構架
本系統以德國Innosent公司生產的IVS-179雷達傳感器作為24GHz雷達前端,負責發射和接收雷達信號;TI公司的TMS320F28335控制DAC模塊產生雷達模塊工作所需的三角波調制信號,三角波調制信號進入IVS-179的輸入端,IVS-179的輸出端經過高通濾波和放大電路后,輸入到TMS320F28335的AD引腳進行采樣和FFT處理,從而獲取前車的相對速度和距離信息。基于雷達測距的車輛防碰撞系統結構如圖4所示,整個系統主要由24GHz雷達模塊、DAC模塊、高通濾波電路、放大電路及DSP采樣和信號處理部分構成。
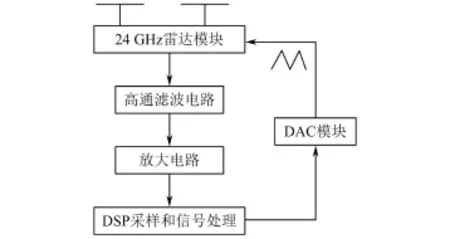
圖4 系統結構Fig.4 system structure
3.1 24GHz雷達模塊
IVS-179雷達傳感器是德國Innosent公司生產的24GHz帶VCO的雷達收發器,是一款應用廣泛的窄波束雷達傳感器。由于采用平面微帶天線結構,IVS-179的體積非常小,適合在汽車上安裝。IVS-179傳感器電路主要由信號源、混頻輸出和信號收發部分構成。其中信號源包括VCO和供壓源,VCO用于接收三角波調制信號,實現FMCW工作模式,供電源采用5V電壓供電。IVS-179雷達的工作原理為:VCO接收三角波調頻信號后,輸出一個發射信號,發射信號分成2路,一路經發射天線發射出去,另一路進入混頻器;接收天線接收到回波信號,經去噪和放大處理后,進入混頻器與發射信號進行混頻,最終形成差頻信號。
3.2 DAC模塊
本系統選用DAC8563芯片產生周期三角波信號作為雷達模塊的調制信號。DAC8563是TI公司推出的一款16位、雙通道,輸入電壓為2.7~5.5V,且具有高速SPI接口的數模轉換芯片。DAC模塊與TMS320F28335通過SPI接口連接,TMS320F28335通過SPI向DAC8563的寄存器發送相關命令,控制DAC8563產生三角波調制信號。
3.3 高通濾波和放大電路
在對差頻信號采樣和數字處理前,需對差頻信號進行濾波和放大處理。24GHz雷達模塊由于受到三角波調制,調制信號的頻率為100Hz,所以采用截止頻率為1kHz的高通濾波器,即選用高通截止頻率為調制頻率的10倍。由于多反饋有源濾波器具有集成度高、增益高、Q值高等優點,同時,有源濾波器相比簡單的無源濾波器具有更小的衰減和更小的體積[10]。本系統采用有源運放芯片LM358設計的二階高通濾波器。
通過解調濾波后的差頻信號為微弱類信號,與目標的距離成反比。由于雷達模塊混頻器輸出的信號幅度范圍很小,距離遠的回波信號幅度比距離近的回波信號幅度小,若對回波信號直接進行AD采樣,幅度大的回波信號會淹沒幅度小的回波信號[11],因此在采樣前必須對中頻信號進行放大。本系統中,由于雷達前端模塊的限制,中頻放大的增益不能超過60 dB;同時TMS320F28335的AD采樣電壓不能超過3 V,否則會燒壞芯片。考慮到近距離和遠距離幅度范圍變換較大,若采用固定放大增益,則可能使AD采樣的輸入電壓超過安全范圍。相反,采用自動增益控制(AGC)電路可以隨輸入信號的幅度自動調節其增益,達到輸出電壓穩定在一定范圍內。本系統選用的AD603芯片是ADI公司繼AD600后推出的一款低噪聲、寬頻帶、高增益的壓控VGA芯片,其增益與控制電壓呈線性關系,可調增益范圍為9~51dB。為了使增益達到+60dB,系統采用2片AD603芯片順序級聯,放大增益以滿足系統需求。
3.4 DSP采樣和信號處理
本系統采用TI公司生產的TMS320F28335作為數字信號核心處理器,相比于2000系列的其他芯片,TMS320F28335增加了浮點計算內核,提高了復雜計算的能力。該處理器具有如下優點:
1)32位浮點DSP,處理器主頻高達150MHz,CPU指令周期6.67ns,指令執行速度快;
2)片上存儲大,包括256K×16位的FLASH,34K×16位SRAM,還具有外部存儲器擴展接口XINTF;
3)片上外設豐富,其中包括18路PWM,16通道ADC,3通道SCI,88個通用輸入/輸出接口,1通道SPI等。
TMS320F28335片內集成了一個12位的模數轉換器,通過多路復用可以配置成16通道模擬輸入;采樣頻率最高可配置為12.5MHz;多種觸發源啟動ADC轉換。
系統中,TMS320F28335控制DAC模塊產生周期為10ms、幅度為3~8V的三角波信號,通過三角波對雷達模塊進行調頻。同時,TMS320F28335控制AD以2MHz的采樣頻率對雷達的差頻信號采樣。由于三角波調頻和AD采樣需要同步,才能正確獲取上下掃頻段的差頻頻率;系統采用定時器中斷0控制DAC模塊產生三角波,定時器中斷間隔為10 ms。定時器中斷函數內,每產生一個DAC值,ADC進行一次采樣并保存在一個臨時數組中。當數組中的采樣點數達到1024點,程序進入FFT算法部分,通過對1024的采樣點數進行FFT變化,即可計算出上掃頻段頻率,同樣方法計算出下掃頻段頻率。根據式(7)、(8)計算當前車距和相對車速,從而實現安全預警。
系統軟件流程如圖5所示。啟動系統并初始化后進入AD采樣,經FFT變換和譜峰搜索獲取頻率信息,根據頻率計算出相對速度和車距,以此判斷車輛的安全狀況。
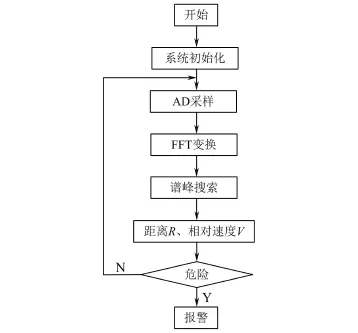
圖5 系統軟件流程Fig.5 System software process
4 系統仿真及結果分析
IVS-179中心頻率為24GHz,最大調頻帶寬為250MHz,三角波調制信號周期為10ms,AD采樣頻率為1MHz,系統最大測量距離為150m,最大測量速度為200km/h。根據以上參數建立FMCW雷達系統模型,通過Matlab軟件完成了系統模型的仿真。圖6為車距90m、速度90km/h的上下掃頻段的頻譜。

圖6 差頻信號頻譜Fig.6 Spectrum of beat frequency signal
在圖6中,上掃描差頻頻率約為34.18kHz,下掃描差頻頻率約為26.367kHz。根據式(7)、(8)可以測出當前車距為90.82m,車速為87.89km/h。表1為3組不同距離和速度下的仿真數據及測量誤差。從表1可看出,直接對差頻信號進行FFT變換產生的誤差較大。
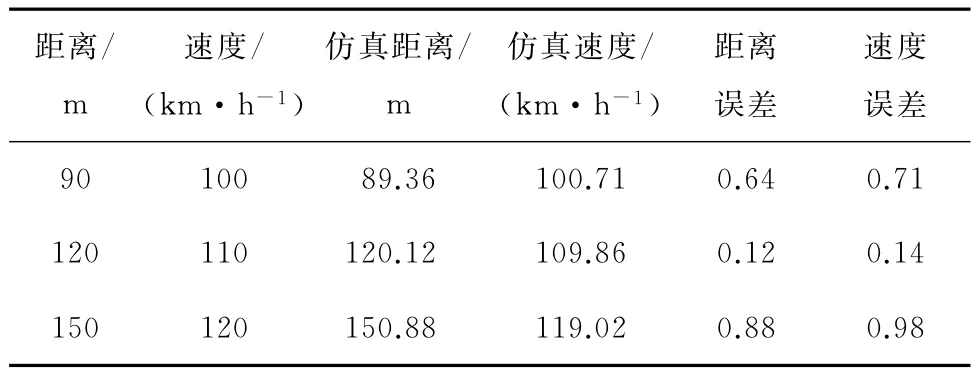
表1 3組距離和速度下的仿真數據Tab.1 Simulation data for three distances and speeds
系統誤差主要由FFT的柵欄效益產生。直接對N點進行FFT變換具有固定的頻率間隔fs/N,其中fs為采樣頻率。增加采樣點N可以提高頻譜分辨率,但系統的運算量和內存也會增大,在實時系統中對系統的性能影響很大。為此,出現了各種不同原理的頻譜細化和校準方法,綜合比較各方法,本系統采用Chirp-Z方法進行頻譜細化。
Chirp-Z是一種在Z平面沿著一段螺旋線均勻采樣的Z變換方法。基本原理是在一段螺旋線上選取頻率起始點和螺旋參數,確定采樣頻率和采樣點數,對此段頻帶進行局部Z變換[12]。通過FFT粗略計算出頻譜譜峰所在位置,以此譜峰位置的前一點所對應頻率為Chirp-Z的起始頻率進行頻譜細化。表2為經Chirp-Z頻譜細化后3組不同距離和速度的仿真數據。對表2和表1仿真結果對比發現,Chirp-Z算法對系統精度有一定的優化作用。

表2 Chirp-Z優化后的仿真數據Tab.2 Simulation data under Chirp-Z optimization
5 結束語
針對交通安全事故日趨增多,設計了一種以24 GHz雷達為數據收發模塊、浮點 DSP芯片TMS320F28335為核心處理器的車輛防碰撞系統,并通過Matlab軟件對系統模型進行仿真驗證。仿真結果表明,連續三角波調制的雷達仿真系統能夠較準確地獲取本車與前車的車距和相對車速;同時,由于采樣間隔的限制,系統存在一定的誤差;在不增加采樣點數的情況下,Chirp-Z能提高測距精度。對于汽車防撞雷達系統而言,現階段主要技術難題是如何提高測距精度和避免虛漏警。下一步將對如何減少虛警和漏警進行研究,并在實際環境中進行測試。隨著汽車保有量的快速增加,車輛防碰撞系統在未來必定擁有廣闊的市場空間。
[1] 陳勇,黃席樾,楊尚罡.汽車防撞預警系統的研究與發展[J].計算機仿真,2006,23(12):239-243.
[2] WU Yurong,WANG Congling,LI Xunbo,et al.Study on automotive anti-collision radar system and its signal processing algorithm[C]//IEEE of International Forum on Information Technology and Applications,2009:586-590.
[3] EUGIN H,KIM Sang-dong,CHIHO P,et al.Automotive FMCW radar with adaptive range resolution[C]//Second International Conference on Future Generation Communication and Networking Symposia,2008:130-133.
[4] 黃文奎.毫米波汽車防撞雷達的設計與實現[D].上海:中國科學院上海微系統與信息技術研究所,2006:5-6.
[5] 梁品,陳照章,于敬泉.基于DSP的汽車防撞雷達及其信號處理[J].微電子學,2007,37(5):628-635.
[6] 鐘勇,姚劍峰.現代汽車的四種測距方法[J].汽車工業研究,2001(2):38-40.
[7] 李飛,曹峰,高一棟,等.汽車防撞雷達報警算法[J].現代雷達,2013,35(12):31-37.
[8] 劉剛,侯德藻,李克強,等.汽車主動避撞系統安全報警算法[J].清華大學學報(自然科學版),2004,44(5):697-700.
[9] 丁祥.基于DSP的汽車防撞雷達信號處理的設計與實現[D].西安:西安電子科技大學,2014:12-13.
[10] 姜興,劉濤.24GHz車載防撞雷達及中頻信號處理電路設計[J].微型機與應用,2014,33(1):56-59.
[11] 高香梅.FMCW防撞雷達系統中頻信號處理的軟硬件關鍵技術研究[D].合肥:合肥工業大學,2013:18-19.
[12] 陳祝明,丁義元,向敬成.采用Chirp-Z變換提高LFMCW雷達的測距離精度[J].信號處理,2002,18(2):106-112.
編輯:梁王歡
A vehicle anti-collision system based on FMCW radar ranging
LIU Junhui,CHEN Hongbin
(School of Information and Communication Engineering,Guilin University of Electronic Technology,Guilin 541004,China)
Aiming at the frequent traffic accidents,the driver encounters a potential collision is not timely,a vehicle anti-collision system is designed based on radar ranging.The system uses 24GHz radar sensor for the front-end signal transceiver module,floating-point DSP chip as the core sampling and processing of data.Radar uses a continuous triangle wave frequency modulation and applies Chirp-Z algorithm for spectrum refinement of radar beat frequency signal to improve the range accuracy.Simulation results show that the system can effectively get the distance and the relative speed of the vehicle in front,and achieve security warning.
vehicle anti-collision;24GHz radar;floating-point DSP;triangular wave modulation;security warning
TN953
:A
:1673-808X(2016)05-0349-06
2016-03-31
國家自然科學基金(61162008)
陳宏濱(1981-),男,湖南邵陽人,教授,博士,研究方向為傳感器網絡、認知無線電。E-mail:chbscut@guet.edu.cn
劉軍輝,陳宏濱.基于FMCW雷達測距的車輛防碰撞系統[J].桂林電子科技大學學報,2016,36(5):349-354.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2018年11期)2018-08-04 03:25:42
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
家庭影院技術(2017年9期)2017-09-26 03:41:45
作文大王·低年級(2016年4期)2016-04-18 00:24:37
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25