MEMS后坐保險機構在高沖擊環境下的失效模式
2017-01-16 09:11:03劉加凱
探測與控制學報 2016年6期
關鍵詞:環境
劉加凱,李 娜
(1.武警工程大學裝備工程學院,陜西 西安 710086;2.武警工程大學理學院,陜西 西安 710086)
MEMS后坐保險機構在高沖擊環境下的失效模式
劉加凱1,李 娜2
(1.武警工程大學裝備工程學院,陜西 西安 710086;2.武警工程大學理學院,陜西 西安 710086)
針對金屬基MEMS后坐保險機構在高沖擊環境下的作用可靠性問題,采用瞬態動力學方法對MEMS后坐保險機構在發射和跌落環境下的失效模式進行了仿真及馬希特錘沖擊試驗。仿真和試驗結果表明,在發射環境下,當MEMS后坐保險機構的卡頭進入卡槽時,在卡頭翼片的轉彎處會產生較大的塑性變形,易造成卡頭不能被可靠鎖定的失效模式;在跌落環境下,由于彈簧上端拐角處發生了較大的塑性變形,使后坐滑塊不能在彈簧回復力的作用下恢復原位,導致后坐滑塊已實際解除對離心滑塊的約束。最后,對MEMS后坐保險機構中易產生塑性變形的原因進行了分析。
MEMS引信;后坐保險機構;高沖擊環境;失效模式
0 引言
作為引信MEMS保險機構的核心部件,后坐保險機構是其第一道保險,確保引信在感受發射后坐過載時解除保險,而在感受勤務處理跌落過載時不解除保險[1-2]。相對于硅類材料而言,金屬基MEMS機構具有較好的抗沖擊、抗過載能力,非常適合于加工引信中的后坐保險機構等[3]。當前,在金屬基MEMS后坐保險機構的設計和制造方面已開展了大量的研究工作[4-5],但這些MEMS機構能否抵抗高沖擊等惡劣的環境條件,是其能否應用于引信系統的關鍵。為考核金屬基MEMS后坐保險機構在高沖擊環境下的作用可靠性,本文提出了MEMS后坐保險機構在高沖擊環境下的失效模式。
1 后坐保險機構的運動特性
1.1 后坐保險機構的運動模型
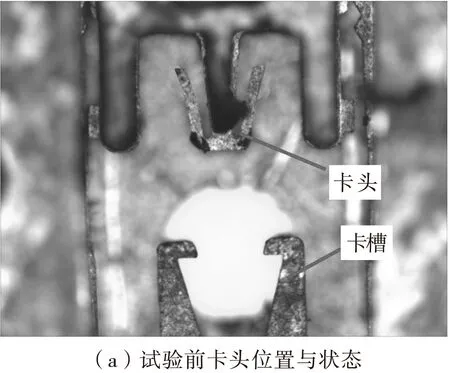
圖1中所示的MEMS后坐保險機構就是由鎳材料采用LIGA工藝加工而成的,由框架、彈簧、滑塊、齒形曲折槽、閉鎖機構組成[2]。其作用原理為:當受到發射后坐過載作用時,后坐滑塊克服彈簧拉力和側壁摩擦阻力向下運動,由于發射過載作用時間相對較長,后坐滑塊能夠通過齒形曲折槽并運動到位,閉鎖機構閉合,解除對離心滑塊的約束;而當受到跌落產生的沖擊過載時,由于作用時間相對較短以及齒形曲折槽的延時作用,后坐滑塊不能運動到位,并在彈簧的回復力作用下恢復至原位,實現運動可逆。

圖1 帶有齒形曲折槽的后坐保險機構Fig.1 Setback arming device withdentiform groove
為描述后坐保險機構的運動狀態,選取后坐滑塊作為研究對象,在與齒形曲折槽接觸過程中,后坐滑塊的動力學方程為[6]:
N1(sinα+fcosα)-fN2
(1)
式(1)中,m為后坐滑塊質量,y為后坐滑塊下降的距離,a(t)為引信后坐加速度,k為彈簧剛度,λ0為彈簧的預拉伸長度,N1為兩接觸齒間的正壓力,α為半齒形角,f為動摩擦系數,N2為滑塊上下端的觸點與框架側壁的正壓力。
1.2 發射環境下的運動特性
利用ANSYS/LS-DYNA軟件建立后坐保險機構的彈塑性非線性三維仿真模型,電鑄鎳材料的基本參數如表1所列[7-8]。本節以一個持續時間為1 ms,在0.5 ms時達到18 000g峰值的半正弦沖擊脈沖,模擬引信發射過程中的后坐過載,并采用瞬態動力學分析方法對后坐保險機構在發射環境下的運動特性進行仿真分析。
通過仿真分析,得出后坐滑塊在半正弦脈沖作用下的運動特性曲線如圖2所示。由圖2(a)后坐滑塊的時間-位移曲線可知,后坐滑塊在沖擊載荷作用下迅速向下運動,并在0.4 ms處達到最大位移1 200 μm,此時卡頭進入卡槽中,閉鎖機構閉合。圖2(b)為后坐滑塊從開始運動到閉鎖機構閉合之前(即前0.4 ms)的時間-速度曲線,由圖可知,滑塊在通過曲折槽時速度呈震蕩性,這說明齒形曲折槽對后坐滑塊的運動起到了延滯的作用。通過曲折槽后速度迅速增大,當閉鎖機構閉合后,滑塊速度迅速降低至零值。
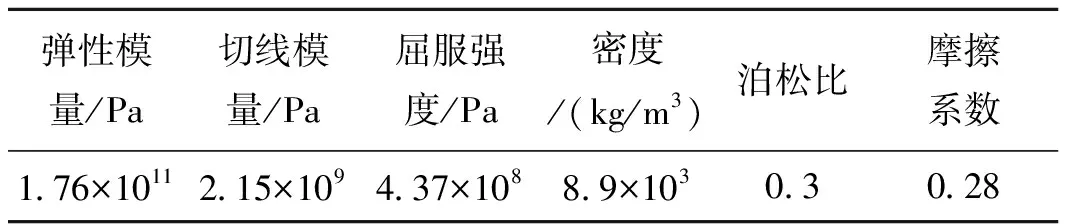
表1 仿真模型基本參數Tab.1 Basic parameter of simulation modal


圖2 后坐滑塊的運動特性曲線Fig.2 Motion curve of setback slipper
圖3為4 ms處后坐保險機構運動到位后的塑性應變狀態。由圖可知,后坐滑塊在沖擊載荷作用下向下運動時,特別是彈簧的上端幾節,由于轉彎處的應力大于材料的屈服強度,引起了較大的塑性變形,最大塑形應變率達10.3%。在卡頭與卡槽側壁碰撞接觸過程中,卡槽側壁對卡頭兩側的翼片產生壓力作用,使翼片轉彎處的應力大于材料的屈服強度,從而使轉彎處發生較大的塑性變形,最大塑形應變率達18.5%,兩側翼片上端的張度變小,變為閉鎖前的67%,進入卡槽后卡頭翼片的張度僅為卡槽槽口寬度的1.15倍。

圖3 后坐保險機構閉鎖后的塑性變形情況Fig.3 The displace and plastic deformation of setback arming device after close down
在后坐沖擊過載作用下,彈簧的上端會引起較大的塑性變形,這是由于彈簧上端不僅承受了滑塊的重量,而且還承受了整個彈簧的重量。雖然彈簧的重量僅為滑塊的15.6%,但在高沖擊作用下,由彈簧自重引起的慣性力不容忽視。以加速度18 000g為例,彈簧最下端承受2.82 N的慣性力(由滑塊的質量引起),而在最上端則承受3.27 N的慣性力(由滑塊和整個彈簧的質量引起),在彈簧各段剛度相同的條件下,其變形量從下端到上端逐漸變大。此外,由于沖擊載荷的有效作用時間很短,加載速率很高,導致沖擊塑性波的傳播速率很低,且隨其向前傳播而迅速衰減,導致材料的應力應變不均勻性很大,使塑性變形主要集中在應力較大的位置[9]。
當卡頭進入卡槽時,在卡頭翼片的轉彎處同樣會產生應力集中現象,產生較大的塑性變形,導致卡頭翼片的張度幾乎與槽口寬度相同,易造成卡頭不能被可靠鎖定的故障,引發可靠性問題。
1.3 跌落環境下的運動特性
保險機構是保證引信安全性的核心部件,根據GJB573A-1998《引信環境與性能試驗方法》的規定,引信要能夠抵抗從12 m高度自由跌落到鋼板上的沖擊脈沖,并保證引信的安全性[9]。本節以一個持續時間為300 μs,在150 μs時達到峰值12 000g的半正弦脈沖來模擬該跌落環境,對后坐保險機構在跌落環境中的運動狀態進行仿真分析[10]。
通過仿真分析,后坐滑塊在半正弦脈沖作用下的運動特性曲線如圖4所示。由圖4可知,后坐滑塊的位移在初始階段迅速增大,在0.4 ms時達到最大值682 μm,隨后在彈簧回復力作用下,向上運動約120 μm,之后滑塊位移基本穩定在560 μm左右,超出了后坐滑塊對離心滑塊的約束距離(300 μm)。此時,雖然后坐保險機構中的閉鎖機構并未閉合,但后坐滑塊已實際解除了對離心滑塊的約束,從而使后坐保險機構在跌落環境中存在安全隱患,如圖5所示。由圖5可知,彈簧的上端幾節在沖擊脈沖作用下發生了較大的塑性變形,最大塑性應變率達14.6%。利用Matlab軟件對彈簧上各節點由塑性應變引起的縱向位移進行積分,可得此時彈簧由塑性應變引起的縱向伸長量為546 μm。加之滑塊和彈簧自重以及曲折槽阻力的作用,使得滑塊的位移最終穩定在560 μm左右,這是導致后坐滑塊不能在彈簧回復力的作用下恢復至原位的根本原因所在。
該后坐保險機構在引信發射周期之前的跌落環境下能夠實際解除對離心滑塊約束,雖然經歷12 m跌落試驗后引信不再使用,但仍使引信在轉移和處理過程中存在一定的安全隱患。
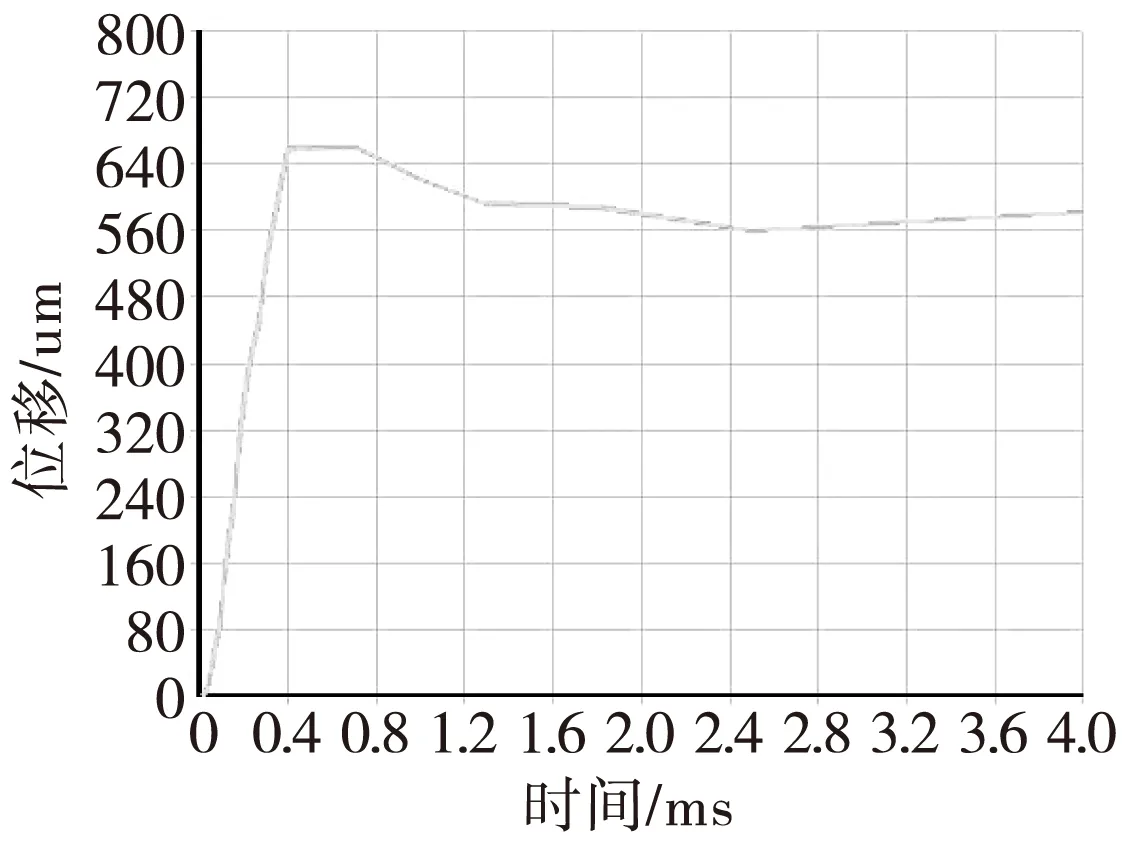
圖4 后坐滑塊的時間-位移曲線Fig.4 Time-displace curve of setback slipper

圖5 后坐保險機構解除對離心滑塊的約束Fig.5 The displace and plastic deformationstate of setback arming device
2 后坐保險機構的機械沖擊試驗
為模擬MEMS后坐保險機構在發射和跌落環境下的運動特性,進行了馬希特錘機械沖擊試驗。由于利用馬希特錘進行沖擊試驗,每次沖擊的加速度值的重復性較差,不能嚴格按照試驗設計值開展試驗,所以采用與仿真數據的相接近的數值開展試驗研究。在沖擊試驗中,各樣本的試驗情況如表2所列。

表2 后坐保險機構在沖擊試驗中的試驗情況Tab.2 The testing status of setback arming devices in mechanical shock test
由表2可知,后坐保險機構解除保險的沖擊脈沖不僅要有足夠的g值,還要有一定的脈寬,這是齒形曲折槽起到延時作用的結果。從表中可以看出,解除保險的g值至少要大于3 400g,脈寬也要大于600 μs。
在沖擊試驗中,后座保險機構出現的主要失效模式如下:
1)在試驗過程中,第2發和第4發保險機構由于卡頭翼片發生較大的塑性變形而從卡槽中脫出,導致閉鎖機構不能可靠閉合,如圖6所示。
2)為了考核后坐保險機構在勤務處理時的安全性,進行了馬希特錘剛對剛的錘擊試驗(表2中第7、8、9、10發保險機構),模擬勤務處理中跌落時的狀態。雖然在跌落試驗中,后坐保險機構未閉鎖,但是由于彈簧在上端幾節的拐角處發生了較大的塑性變形,使后坐滑塊不能在彈簧回復力的作用下恢復至原位,從而導致后坐滑塊實際解除了對離心滑塊的約束,使引信存在一定安全隱患,如圖7所示。
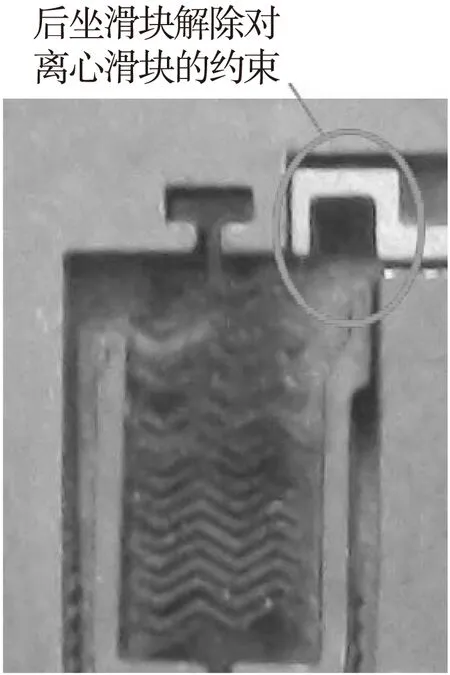
圖7 沖擊試驗中后坐保險機構的位移情況Fig.7 Impact pulse and displacement of setback arming device
通過對MEMS后坐保險機構的試驗結果進行分析可知,在馬希特錘擊試驗中所出現的失效模式與仿真結果具有較好的一致性。
3 后坐保險機構的失效原因分析
通過對后坐保險機構在發射和跌落兩類高沖擊環境下的運動特性進行仿真和試驗分析可知,后坐保險機構在承受高沖擊環境作用下,其主要失效模式包括:閉鎖機構不能可靠閉合、后坐滑塊在跌落環境中解除對離心滑塊的約束等。這些失效模式都是由于機構在高沖擊作用下發生較大變形,進而導致塑性變形所引起的。
之所以在后坐保險機構中易產生塑性變形,與MEMS機構的結構形態關系很大。利用(準)LIGA工藝加工MEMS機構時,由于工藝特點的限制,MEMS機構多為平面結構,機構之間通過平面運動相互約束,這就造成了平面MEMS機構中必然存在較多的拐角、轉彎等易引起應力集中的位置,在外力的作用下易于引發塑性變形。因此應通過對其結構進行合理設計予以避免。
4 結論
本文采用瞬態動力學方法對MEMS后坐保險機構在發射和跌落環境下的失效模式進行了仿真及馬希特錘沖擊試驗。仿真和試驗結果表明,在發射環境條件下,當MEMS后坐保險機構的卡頭進入卡槽時,卡頭翼片的轉彎處會產生較大的塑性變形,易造成卡頭不能被可靠鎖定的故障。在跌落環境下,由于彈簧上端拐角處發生了較大的塑性變形,使后坐滑塊不能在彈簧回復力的作用下恢復至原位,從而導致后坐滑塊實際解除了對離心滑塊的約束,使引信存在一定的安全隱患。
[1]劉加凱,齊杏林,朱仁貴,等. MEMS后坐保險機構存在的問題及解決方法[J]. 彈箭與制導學報,2013,33(3):63-66.
[2]劉加凱,齊杏林. MEMS安全系統的解除保險方式[J]. 探測與控制學報,2012,34(6):25-29.
[3]郝永平,王士偉,張德智. 基于MEMS慣性延時機構的動態特性分析與仿真[J]. 探測與控制學報,2007,29(2):38-41.
[4]石庚辰,李華. 基于LIGA(準LIGA)工藝的微機械零件公差問題[J]. 功能材料與器件學報,2008,14(2):380-383.
[5]Robinson C H, Hoang T Q, et al. Materials, fabrication, and assembly technologies for advanced MEMS-based S&A for projectile munitions[R]. Adelphi: RDECOM ARDEC Fuze Division, 2006.
[6]牛蘭杰,張建,趙旭. 基于有限元法的MEMS后坐保險機構運動特性研究[J]. 探測與控制學報,2006,28(4):15-18.
[7]劉小崗,施坤林,牛蘭杰,等. 有限元法在MEMS安全系統仿真中的應用[J]. 探測與控制學報,2006,28(1):14-16.
[8]Li Hua,Shi Gengchen. Contrastive study on the mechanical performance of MEMS microsprings fabricated by LIGA and UV-LIGA technology [C]// MEMS/MOEMS technologies and applications Ⅲ. 2008: 254-258.
[9]GJB573A-1998《引信環境與性能試驗方法》[S]. 北京:國防科學技術工業委員會,1998.
[10]李德鵬,戴祥軍. 彈藥儲運安全[M]. 石家莊:軍械工程學院,2004: 111-149.
Failure Models of MEMS Setback Arming Device under High Impact Environment
LIU Jiakai1, LI Na2
(1. Engineering & Equipment Engineering College, University of Armed Police, Xi’an 710086, China;2. Engineering & Equipment Engineering College, University of Armed Police, Xi’An, 710086, China)
In order to examine the action reliability of metal MEMS setback arming device under high impact environment, the instantaneous-dynamics was utilized to simulate the motion specific of setback arming device in launching environment and falling off environment, and MEMS setback arming devices was undertaken Maxite impact test. The research results showed that the blocking head could not be locked reliably because of large plastic deformation in launching environment. The corners of spring occur big plastic deformation under falling off environment, which led to the spring stretch, made the slipper unable to comeback original state and centrifugal slipper unfreezing. Finally, the reason of failure models of the MEMS setback arming device was analyzed.
MEMS fuze; setback arming device; high impact environment; failure model
2016-05-14
劉加凱(1985—),男,河南輝縣人,博士,講師,研究方向:MEMS可靠性。E-mail: liujiakai1129@163.com。
TJ43
A
1008-1194(2016)06-0015-05
猜你喜歡
中老年保健(2021年12期)2021-08-24 03:30:40
中國傳媒大學學報(自然科學版)(2021年1期)2021-06-09 08:43:00
中國生殖健康(2020年6期)2020-02-01 06:28:50
新世紀智能(英語備考)(2019年12期)2020-01-13 06:07:18
瘋狂英語·新策略(2019年9期)2019-10-17 01:51:34
中國生殖健康(2019年11期)2019-01-07 01:28:02
中國生殖健康(2018年6期)2018-11-06 07:09:28
濰坊學院學報(2017年2期)2017-04-20 08:44:31
中國環境監察(2016年5期)2016-10-24 05:25:52
中國商論(2016年33期)2016-03-01 01:59:38
