基于CAN總線分析的增程式電動汽車控制策略研究
2017-01-09 08:14:22解來卿羅禹貢劉成祺秦兆博李克強
汽車技術 2016年12期
解來卿羅禹貢劉成祺秦兆博李克強
(1.清華大學 汽車安全與節能國家重點實驗室,北京 100084;2.中國定遠汽車試驗場,南京 210028)
基于CAN總線分析的增程式電動汽車控制策略研究
解來卿1,2羅禹貢1劉成祺1秦兆博1李克強1
(1.清華大學 汽車安全與節能國家重點實驗室,北京 100084;2.中國定遠汽車試驗場,南京 210028)
針對增程式電動汽車控制策略解析的需要,提出了一套基于CAN總線分析的整車控制策略研究方法,該方法包含了數據采集系統搭建、典型工況設計、CAN總線協議破解和整車控制策略解析的全過程。將所提出方法應用于某先進增程式電動汽車的整車控制策略解析中,解析了該車的增程器控制策略、發動機起/停控制邏輯和工作模式切換控制策略,表明了該方法的有效性。
1 前言
增程式電動汽車是一種電驅動的插電式串聯混合動力汽車,具備純電動汽車節能、環保、結構簡單的優點,同時又能夠通過增程器(Auxiliary Power Unit,APU)延長續駛里程,是當前混合動力汽車發展的主要方向之一[1~3]。在增程式電動汽車控制技術開發與理論研究中,通常需要對某一先進車輛的增程器控制策略、起/停控制邏輯及能量管理策略等進行解析,以便于新產品控制策略開發過程中有效地借鑒、對比和改進設計。為確保控制策略解析的正確性,需要一套行之有效的解析方法。雖然基于實車道路試驗的方法能夠通過分析瞬時油耗初步判斷車輛發動機的工作點數和停機邏輯[4],但難以確定其具體的發動機轉速點及切換規律,也不能分析各轉速點對應的增程器功率覆蓋范圍。
為此,本文根據增程式電動汽車的結構性能與控制策略特點,進行了基于轉鼓試驗的控制策略研究,提出了基于CAN總線信號分析的整車控制策略研究方法,并將該方法應用于某先進增程式電動汽車的控制策略解析中,研究了該車的整車控制策略。
2 研究方案
增程式電動汽車的整車控制策略是實現駕駛員意圖和汽車性能的關鍵,同時也是搭建駕駛員意圖與車輛性能表現的橋梁[5,6]。整車控制策略具體表現為汽車踏板輸入與汽車動力總成輸出變量之間的對應關系,研究它們在多種工況下的變化及數據相互關系可以解析整車的控制策略。基于此,本文設計了包括數據采集系統搭建、典型工況設計、CAN總線協議破解和整車控制策略解析在內的研究方案,如圖1所示。

圖1 整車控制策略解析研究方案
首先,搭建能夠實時獲取車輛踏板開度、CAN總線和OBD信息的數據采集系統,并設計能夠覆蓋各種模式下多種車速、加速度、減速度的典型行駛工況,在轉鼓試驗臺上實時采集加速踏板、制動踏板、CAN總線和OBD中的相關數據;其次,基于增程式電動汽車動力總成數據特征與通信協議特征,借助轉鼓試驗臺、CAN總線分析工具和故障診斷儀等,采用“識別-驗證-標定-再驗證”的方法破解該車的CAN總線部分通信協議,提取所需的動力總成和高壓系統數據;最后,基于所采集的踏板開度及動力總成數據,采用數據統計、數學歸納的方法分析動力總成數據曲線特征及數據與工況對應關系,解析車輛的增程器控制策略、發動機起/停策略和整車工作模式切換策略。
3 數據采集系統搭建
針對某先進增程式電動轎車的結構與性能特點,搭建了能夠實時采集汽車踏板開度、CAN總線數據和OBD中發動機數據的采集系統,主要包括轉鼓試驗臺、踏板開度傳感器、CAN分析工具、MicroAutoBox和計算機等,所搭建的數據采集系統硬件構成與連接關系見圖2。

圖2 數據采集系統硬件構成
圖2中,OBD接口中發動機數據通過dSPACE發送查詢命令獲取,踏板傳感器所采集的加速踏板和制動踏板開度信號經接口箱到MicroAutoBox后進行標定處理,處理后的發動機信號和踏板開度信號再由dSPACE發送至CAN端口,通過CANoe實時采集并顯示。
4 CAN總線協議破解
4.1 CAN總線信號提取需求
為了能夠正確解析整車控制策略,需要從CAN總線中提取驅動電機、發動機、發電機和高壓電池的數據。綜合考慮各部件的信號特點及在實際CAN總線數據分析過程中具體信號分析的難度,選擇了需要提取的7組信號,如表1所列。

表1 CAN總線中提取的信號
4.2 CAN協議破解流程與方法
汽車CAN總線通信介質通常為雙絞線,通過布線位置、外觀特征和電壓信號特征可以尋找出汽車CAN總線[7]。借助CANoe軟件,能夠實時采集并顯示車輛運行時的CAN總線中傳輸數據ID及對應數據值。CAN總線協議破解流程見圖3。
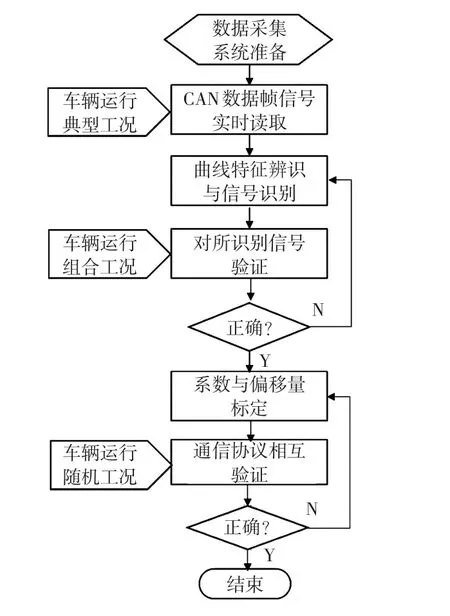
圖3 CAN總線協議破解流程
在信號識別階段,由于CAN總線中傳輸數據較多,需要基于CAN協議特征和所傳數據特征識別所需要提取的信號,破解其協議。首先,根據動力總成信號的特征對CAN總線中傳輸數據進行篩選;其次,按照傳輸速率由高到低的順序,分別建立各ID對應數據幀每個字節的協議文件;最后,車輛運行典型工況,并通過CANoe軟件實時顯示、保存數據幀曲線。為便于識別數據特征與規律,設計的典型工況除勻速、加速、減速工況外,還包括了先加速后減速的三角形工況和加速-勻速-減速的梯形工況。基于數據曲線特征以及數據與工況的對應關系來識別數據曲線表征的含義,基于典型工況識別出的動力總成信號將通過運行多種組合工況進行驗證,以確保信號識別的正確性。
在信號標定階段,借助轉鼓試驗臺和測量儀表對驗證后的信號進行標定,采用儀表實測值與CAN總線采樣值擬合直線的方式標定協議的系數和偏移量。標定公式為:

式中,y為儀表實測值;x為CAN總線采樣值;f為CAN協議系數;b為CAN協議偏移量。
以車速標定為例,擬合直線如圖4所示,根據直線方程,f取整為0.016,b取整為0。其余信號的標定以此類推。

圖4 車速信號標定擬合直線示例
為了確保標定誤差在允許范圍之內,運行多個隨機工況進行相互驗證。對于個別誤差較大的數據,采用循環修正的方式進一步標定。
5 整車控制策略解析
5.1 增程器控制策略解析
基于多種工況下的發動機和發電機數據曲線特征,解析該車發動機轉速點、轉速切換規律、功率覆蓋范圍,進而歸納增程器的控制策略。
采用數據統計的方法分析了不同加速度工況下發動機轉速曲線的分布特征,以確定發動機的怠速轉速和工作轉速。在轉鼓試驗臺上分別以1 m/s2、1.5 m/s2、2 m/s2的加速度起步加速,得到圖5所示的發動機轉速隨時間變化曲線。由圖5a可看出,該車發動機起動后的怠速轉速為2 200 r/min,工作轉速為2 400 r/min;由圖5b可看出,該工況下出現了2 400 r/min和3 500 r/min的工作轉速;由圖5c可看出,該工況下出現了2 400 r/min、4 300 r/min的工作轉速。為尋找該車發動機其余轉速并驗證主要工作轉速,在轉鼓試驗臺運行了NEDC等循環工況,圖5d為在NEDC循環工況中的一段發動機轉速曲線,在該工況下出現了2 400 r/min、3 110 r/min、3 500 r/min和4 300 r/min等工作轉速。經統計可知,該車發動機工作轉速有2 400 r/min、3 110 r/min、3 500 r/min和4 300 r/min;其中,2 400 r/min是該車發動機的主要工作轉速。
采用數學歸納方法分析不同加速工況下發動機轉速曲線的變化特征,以歸納其轉速切換規律。以圖5b和圖5c為例,當出現急加速等需求功率急劇增加時,發動機工作轉速將根據需求功率大小從2 400 r/min直接調整至3 500 r/min或4 300 r/min;如圖5d所示,當需求功率緩慢增加時,發動機工作轉速將采用2 400 r/min→3 110 r/min→3 500 r/min遞進調速。其中,2 400 r/min是發動機的主要工作轉速。
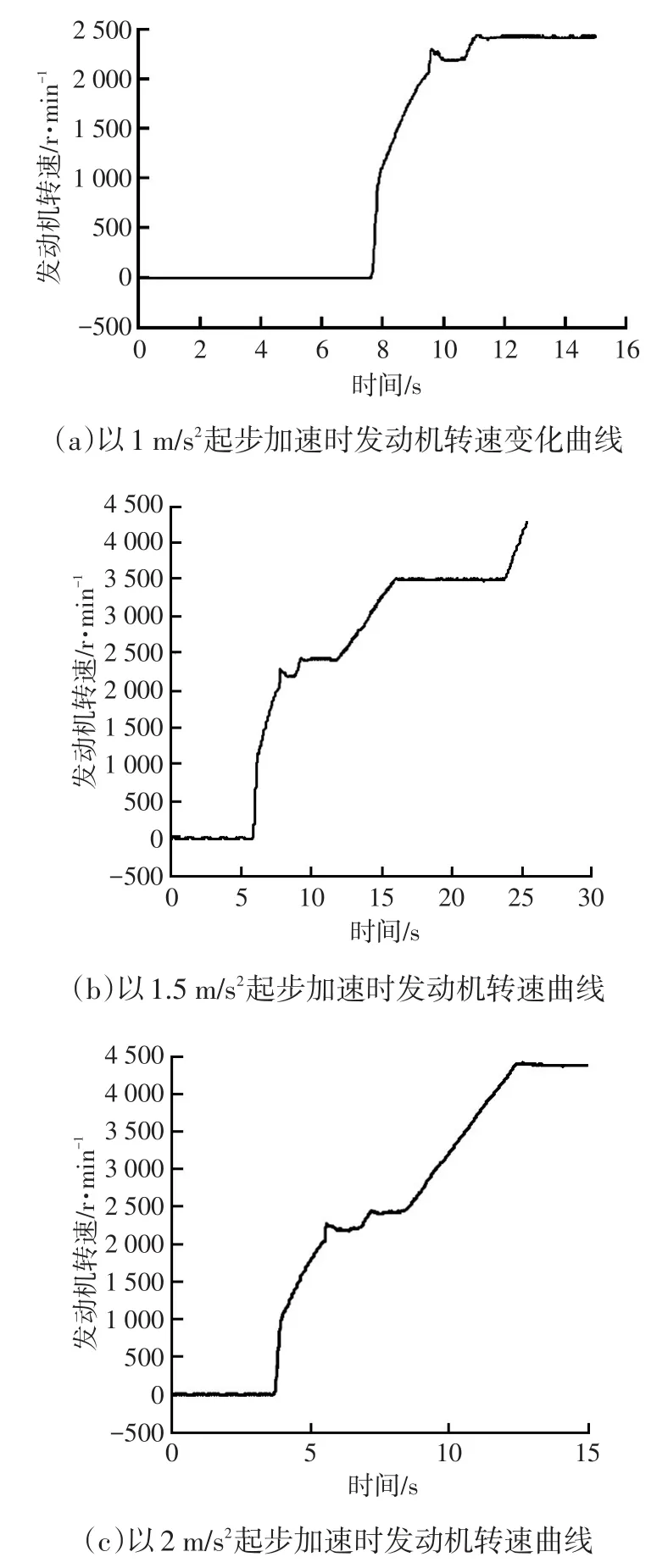

圖5 發動機轉速點分布及切換規律解析示例
通過以上分析可知,該車增程器控制策略屬于功率跟隨策略,根據發動機不同轉速下增程器的電流、電壓可計算出其功率分布及覆蓋范圍,結果如圖6和表2所示。
根據分析結果可知,該車設定的發動機每個工作點覆蓋的功率范圍較大,進而避免了轉速點的頻繁切換現象。
5.2 發動機起/停控制邏輯解析
通過對該車在多種工況下發動機起動時刻的數據統計分析可知,該車具有低車速下的發動機起動控制邏輯及中等車速下的發動機起動控制邏輯,如圖7所示。

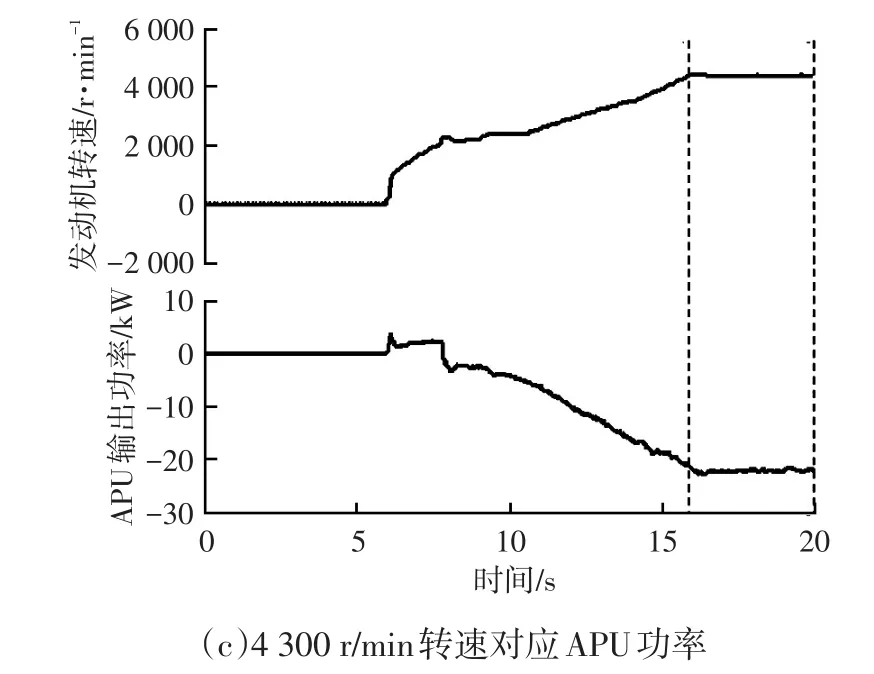
圖6 增程器功率范圍解析示例
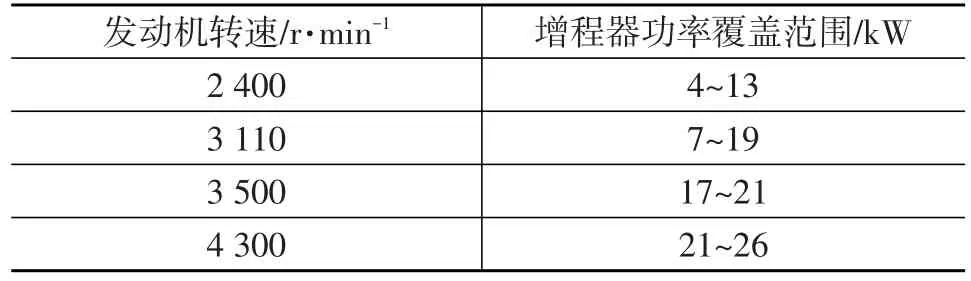
表2 各轉速點對應的增程器功率范圍

圖7 發動機起動控制邏輯解析示例
由圖7a可看出,在低速工況下,車輛緩慢加速運行到551 s時,電池放電能力不足以滿足整車的功率需求,需要APU輸出電流來輔助電池供電,因此控制器控制發動機在低車速下起動;由圖7b可看出,在中速工況下,車輛以33.3 km/h速度勻速行駛,當運行到664 s時,電池放電到一定程度,電池剩余里程不足5 km,為避免電池剩余電量過低對電池的損害,控制器控制發動機起動。
對典型工況下該車發動機停機時電池剩余行駛里程、加速和制動踏板狀態進行了分析,解析了發動機在停車、怠速下的停機邏輯,結果如圖8所示。

圖8 發動機停機控制邏輯解析示例
由圖8a可看出,車輛運行到440 s時沒有功率需求,此時發動機立刻斷油停機,避免了不必要的燃油消耗。由圖8b可看出,在418~424 s運行過程中,駕駛員有明顯的停車意圖,車輛并不需要輸出動力,然而此時的電池電力過低,需要充電,導致出現發動機怠速不停機狀態;而在車輛運行到424 s時,電池電量升高并達到一定值,當電池剩余行駛里程為4~6 km時,控制器控制發動機停機。
5.3 工作模式切換控制策略解析
增程式電動汽車工作模式包括通過電池輸出電能的純電模式和通過增程器輸出電能的增程模式,整車的燃油經濟性與模式切換控制策略密切相關[8]。經統計分析,該車在增程模式下出現了多次的純電動模式與增程模式互相切換的現象。
5.3.1 純電模式向增程模式的切換解析
圖9為該車由純電模式向增程模式的切換示例,由圖9可看出,當車輛運行到507 s時,電動機開始輸出動力,此時整車需求功率較小,電池的放電能力足夠滿足電動機需求,整車處于純電動驅動模式;隨著電池電量不斷被消耗,當電池剩余行駛里程不足5 km時,電池放電能力減弱,電能已經無法滿足電動機的功率需求,發動機起動,由增程器向電動機供電,車輛進入增程模式。

圖9 純電模式向增程模式的切換示例
5.3.2 增程模式向純電模式的切換解析
圖10為該車由增程模式向純電模式的切換示例。由圖10可看出,在初期階段,車輛處于增程模式;在車輛運行到1 302 s時,整車由于制動能量回收,發電機向蓄電池充電;在車輛運行到1 309 s時,經過前段時間的充電,電池剩余行駛里程達到4~6 km以上,發動機停機,車輛切換為純電模式行駛。

圖10 增程模式向純電模式的切換示例
6 結束語
本文以增程式電動汽車為研究對象,提出了基于CAN總線分析的整車控制策略研究方法,采用該方法對某先進增程式電動轎車的控制策略進行了解析,結果如下:
a.基于轉鼓試驗臺和CAN總線分析工具所搭建的電動汽車數據采集系統,可實時獲取駕駛員輸入信息和關鍵動力總成數據;
b.所解析的某增程式電動汽車增程器控制策略為多工作點的功率跟隨控制策略,發動機具有2 400 r/min、3 110 r/min、3 500 r/min、4 300 r/min等4個轉速點,每個轉速點對應功率覆蓋范圍較廣;
c.該車的發動機起/停控制邏輯包含低車速下發動機起動邏輯、中等車速下發動機起動邏輯和停車停機、怠速停機等停機邏輯,行駛中根據駕駛員意圖和電池剩余電量進行發動機的起/停控制,避免了電池剩余電量過低對電池的損害;
d.該車工作模式包含純電模式和增程模式,行駛中根據整車功率需求和電池剩余電量進行工作模式切換的控制,從而保證了整車的節能性和排放性。
通過實車解析,證明了所提研究方法的有效性,同時探明了該先進車型的整車控制策略,為增程式電動汽車新產品控制策略的開發提供了借鑒。
1 周磊,羅禹貢,楊殿閣,等.混聯式混合動力車多能源動力控制系統的開發.機械工程學報,2007,43(4):125~131.
2 閔海濤,葉冬金,于遠彬.增程式電動汽車控制策略的優化.汽車工程,2014,36(8):899~903.
3 胡明寅,楊福源,歐陽明高,等.增程式電動車分布式控制系統的研究.汽車工程,2 012,34(3):197~202.
4 劉成祺,解來卿,樊月珍,等.某增程式電動汽車北方冬季工況下能耗測試與分析.汽車技術,2016(2):45~49.
5 Canova M,Guezennec Y,Yurkovich S.On the Control of En?gine Start/Stop Dynamics in a Hybrid Electric Vehicle.Jour?nal of Dynamic Systems Measurement&Control,2009a,131(6):636~650.
6 Li J Q,Zhou L,Zhou W,et al.A Control Strategy to Reduce Fuel Consumption of APU for Range-extended Electric Ve?hicle.EMEIT-12,2012.
7 王振坡,孫逢春,劉鵬.電動汽車原理與應用技術.北京:機械工業出版社,2014.
8 Niu J G,Pei F L,Zhou S,et al.Multi-Objective Optimiza?tion Study of Energy Management Strategy for Extended-Range Electric Vehicle.Advanced Materials Research, 2013,694~697:2704~2709.
(責任編輯文 楫)
修改稿收到日期為2016年7月11日。
Research on the Control Strategies for Range Extended Electric Vehicle Based on CAN Bus Analysis
Xie Laiqing1,2,Luo Yugong1,Liu Chengqi1,Qin Zhaobo1,Li Keqiang1
(1.State Key Laboratory of Automotive Safety and Energy,Tsinghua University,Beijing 100084;2.Dingyuan Automotive Proving Ground,Nanjing 210028)
In order to meet the need of studying the control strategies for range extended electric vehicle,an analysis method of control strategies based on CAN bus analysis was presented,which included data acquision system decoding, typical driving condition design,the total process of CAN bus protocol extraction and vehicle control strategy analysis.This method was applied to an range extended electric vehicle to analyze control strategy of range extender,engine start-stop control logic and mode change,indicating validity of this method.
Range extended electric vehicle,Chassis dynamometer Test,CAN bus,Control strategy
程式電動汽車 轉鼓試驗 CAN總線 控制策略
U467.1
A
1000-3703(2016)12-0020-06
猜你喜歡
汽車維修與保養(2021年8期)2021-02-16 00:28:30
汽車維修與保養(2021年8期)2021-02-16 00:28:18
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
通信電源技術(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
汽車與新動力(2015年1期)2015-02-27 12:11:01
電測與儀表(2014年17期)2014-04-04 11:56:50
汽車與新動力(2014年2期)2014-02-27 12:10:15
