基于相電流正負(fù)序分量相角差的高精度內(nèi)置式永磁同步電機(jī)轉(zhuǎn)子初始位置檢測(cè)方法
2017-01-03 02:58:19劉景林魯家棟
電工技術(shù)學(xué)報(bào) 2016年23期
劉景林 魯家棟
(西北工業(yè)大學(xué)自動(dòng)化學(xué)院 西安 710129)
基于相電流正負(fù)序分量相角差的高精度內(nèi)置式永磁同步電機(jī)轉(zhuǎn)子初始位置檢測(cè)方法
劉景林 魯家棟
(西北工業(yè)大學(xué)自動(dòng)化學(xué)院 西安 710129)
對(duì)內(nèi)置式永磁同步電機(jī)(IPMSM)轉(zhuǎn)子靜止初始位置檢測(cè)技術(shù)進(jìn)行研究,提出一種基于高頻信號(hào)注入法的高精度IPMSM初始位置檢測(cè)方法。該方法通過向電機(jī)繞組中注入高頻旋轉(zhuǎn)電壓信號(hào),通過帶通濾波器得到高頻電流響應(yīng),利用同步旋轉(zhuǎn)坐標(biāo)變換將高頻電流響應(yīng)的正、負(fù)序分量進(jìn)行分離;然后分別對(duì)三相高頻電流正、負(fù)序分量的相角進(jìn)行最小二乘估計(jì),利用任意一相高頻電流正、負(fù)序分量的相角差提取出轉(zhuǎn)子的位置信息;最后通過磁路飽和效應(yīng)對(duì)轉(zhuǎn)子N、S極性進(jìn)行辨別。該方法具有較高的檢測(cè)準(zhǔn)確度,平均檢測(cè)誤差約為1.73°電角度,對(duì)一臺(tái)11 kW的內(nèi)置式永磁同步電機(jī)的實(shí)驗(yàn)表明了該方法的正確性。
內(nèi)置式永磁同步電機(jī) 轉(zhuǎn)子初始位置 高頻信號(hào)注入 最小二乘擬合
0 引言
永磁同步電機(jī)不具備自起動(dòng)能力,在永磁同步電機(jī)變頻起動(dòng)過程中,若無法得知電機(jī)轉(zhuǎn)子的初始位置,就可能會(huì)出現(xiàn)電機(jī)轉(zhuǎn)子短暫的“反轉(zhuǎn)”現(xiàn)象,或者在更嚴(yán)重的情況下,電機(jī)將起動(dòng)失敗[1-6]。為了使永磁同步電機(jī)能夠平穩(wěn)地進(jìn)行起動(dòng),就需要預(yù)先得知電機(jī)轉(zhuǎn)子的初始位置角θ。傳統(tǒng)方法是借助特定的傳感器來實(shí)現(xiàn)這一位置檢測(cè)功能,但這勢(shì)必要增加系統(tǒng)的成本和復(fù)雜度,而且也會(huì)降低系統(tǒng)的可靠性。
針對(duì)上述問題,國內(nèi)外眾多學(xué)者對(duì)永磁同步電機(jī)無位置傳感器控制技術(shù)進(jìn)行了大量研究,主要的思想是利用電機(jī)繞組中的有關(guān)電信號(hào),通過一定的方法估計(jì)電機(jī)轉(zhuǎn)子位置角[7-10]。其中有一類方法是基于電機(jī)轉(zhuǎn)子凸極追蹤思想實(shí)現(xiàn)的,其代表性方法有高頻信號(hào)注入法等,由于這種方法利用了電機(jī)轉(zhuǎn)子的空間凸極效應(yīng),因而適用于具有一定凸極性的電機(jī)[6,7,11-15]。利用高頻信號(hào)注入法估計(jì)電機(jī)轉(zhuǎn)子初始位置,繞組高頻電流響應(yīng)信號(hào)中含有轉(zhuǎn)子的位置信息,但是對(duì)高頻電流響應(yīng)信號(hào)的解調(diào)算法往往比較復(fù)雜,運(yùn)算量大,理論性強(qiáng),實(shí)際應(yīng)用問題可能較多。文獻(xiàn)[1]利用注入高頻信號(hào)導(dǎo)致永磁同步電機(jī)的d、q軸磁路飽和程度不同的原理,實(shí)現(xiàn)了其轉(zhuǎn)子初始位置檢測(cè),同時(shí)根據(jù)定子鐵心的非線性磁化特性判斷轉(zhuǎn)子N、S極性,但是該方法需要估算電機(jī)的阻抗特性,方法復(fù)雜。文獻(xiàn)[6]通過對(duì)高頻電流響應(yīng)信號(hào)進(jìn)行解調(diào)、濾波和最小二乘擬合處理后,再計(jì)算出正弦化響應(yīng)電流最大值時(shí)對(duì)應(yīng)的相位,從而獲取轉(zhuǎn)子初始位置角,最后利用磁路飽和凸極效應(yīng)區(qū)分轉(zhuǎn)子N、S極性。文獻(xiàn)[11]提出了一種基于三相高頻電流響應(yīng)幅值隨轉(zhuǎn)子位置角不同而變化的轉(zhuǎn)子初始位置檢測(cè)方法,該方法具有對(duì)電機(jī)參數(shù)變化不敏感、算法簡(jiǎn)單等優(yōu)點(diǎn),但是其檢測(cè)誤差限為6°,平均檢測(cè)誤差為2.97°。文獻(xiàn)[12]分析了永磁同步電機(jī)系統(tǒng)各參數(shù)對(duì)脈振高頻信號(hào)注入法位置估計(jì)誤差的影響,有針對(duì)性地減小了位置估計(jì)誤差。
本文提出了一種基于高頻信號(hào)注入法的高精度內(nèi)置式永磁同步電機(jī)(Interior Permanent Magnet Synchronous Motor,IPMSM)轉(zhuǎn)子初始位置檢測(cè)方法,該方法具有較高的位置檢測(cè)準(zhǔn)確度,平均檢測(cè)誤差約為1.73°電角度(下文未專門指出的角度均指電角度),完全能夠滿足內(nèi)置式永磁同步電機(jī)平穩(wěn)起動(dòng)的要求,工程實(shí)用價(jià)值較高。
1 轉(zhuǎn)子d軸初始位置檢測(cè)原理
內(nèi)置式永磁同步電機(jī)在兩相靜止坐標(biāo)系αβ中的電壓、磁鏈方程為
(1)
(2)
式中,uα、uβ和iα、iβ分別為兩相靜止坐標(biāo)系αβ中電機(jī)的電壓和電流;R為定子電阻;d/dt為對(duì)時(shí)間t的微分;ψα、ψβ分別為兩相靜止坐標(biāo)系下的電機(jī)繞組全磁鏈;ω為電機(jī)轉(zhuǎn)子角速度;ψf為永磁體勵(lì)磁磁鏈;θ為電機(jī)轉(zhuǎn)子位置角度;L0為均值電感,L0=(Ld+Lq)/2;L2為半差電感,L2=(Ld-Lq)/2;Ld、Lq分別為永磁同步電機(jī)直軸、交軸電感,且有
(3)
對(duì)于式(1),由于初始位置檢測(cè)時(shí)電機(jī)處于靜止?fàn)顟B(tài)(ω=0),并且由于電機(jī)繞組中通入高頻電壓信號(hào),對(duì)高頻電流分量的分析可以忽略定子電阻壓降的影響,因此,忽略等式右側(cè)第1、3項(xiàng),可得IPMSM的高頻電壓方程為
(4)
式中,uαh、uβh和iαh、iβh分別為兩相靜止坐標(biāo)系αβ中的高頻電壓和電流。
由于向電機(jī)繞組中注入的高頻旋轉(zhuǎn)電壓信號(hào)在兩相靜止坐標(biāo)系中的方程為
(5)
式中,U和ωh分別為注入高頻旋轉(zhuǎn)電壓信號(hào)的幅值和電角速度。
利用式(4)、式(5)和2/3變換可得到高頻電流響應(yīng)在三相靜止坐標(biāo)系A(chǔ)BC中的方程為
(6)
(7)
式中,iAh、iBh、iCh分別為三相高頻電流響應(yīng)。
由式(6)可知,A、B、C三相高頻電流響應(yīng)的正、負(fù)序分量的相位差均是與轉(zhuǎn)子位置角有關(guān)的量。由此可以對(duì)三相高頻電流正、負(fù)序分量進(jìn)行分離,并通過最小二乘擬合得到各自的相位,通過計(jì)算其相位差便可得到轉(zhuǎn)子位置信息。計(jì)算方法有:①A相正、負(fù)序分量的相位差為轉(zhuǎn)子位置角的2倍;②B相正、負(fù)序分量的相位差減去2π/3為轉(zhuǎn)子位置角的2倍;③C相正、負(fù)序分量的相位差加上2π/3為轉(zhuǎn)子位置角的2倍;④A、B、C三相各自正、負(fù)序分量的相位差之和為轉(zhuǎn)子位置角的6倍。
可以使用上述任意一種方法對(duì)轉(zhuǎn)子位置角進(jìn)行估計(jì)。考慮到實(shí)際應(yīng)用時(shí)的軟件開銷問題,可以僅對(duì)其中任意一相的電流正、負(fù)序分量進(jìn)行分析來估計(jì)轉(zhuǎn)子的初始位置。而通過實(shí)驗(yàn)驗(yàn)證,采用上述4種方法中的任意一種對(duì)轉(zhuǎn)子位置進(jìn)行估計(jì),其差異很小。本文后續(xù)內(nèi)容及實(shí)驗(yàn)結(jié)論部分的轉(zhuǎn)子位置估計(jì)均采用第1種方法得到,即對(duì)A相電流的正、負(fù)序分量進(jìn)行分析。上述轉(zhuǎn)子位置估計(jì)方法的結(jié)構(gòu)框圖如圖1所示。
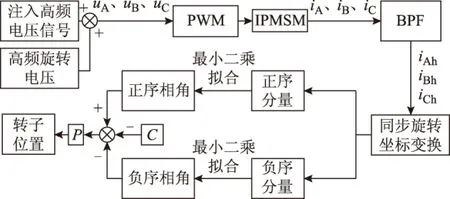
圖1 轉(zhuǎn)子位置估計(jì)方法結(jié)構(gòu)框圖Fig.1 Diagram of rotor position estimation method
圖1中,uA、uB、uC分別為注入電機(jī)的三相電壓值;PWM表示通過三相橋式逆變器將三相電壓注入到電機(jī)中;iA、iB、iC分別為電機(jī)的三相電流響應(yīng);BPF(band-pass filter)為數(shù)字帶通濾波器;C為不同位置估計(jì)方法所需要補(bǔ)償?shù)某?shù)值;P為不同估計(jì)方法需要乘(除)的系數(shù)。
同步旋轉(zhuǎn)坐標(biāo)變換的原理與三相靜止到兩相旋轉(zhuǎn)坐標(biāo)變換(3r/2s)的原理類似,只是由于此時(shí)電機(jī)轉(zhuǎn)子位置未知,因而需要假定一個(gè)旋轉(zhuǎn)角進(jìn)行輔助變換。先假定一個(gè)與正向分量轉(zhuǎn)向、角速度相同的旋轉(zhuǎn)角θ′和與之對(duì)應(yīng)的d′q′軸系,利用3r/2s對(duì)三相高頻電流響應(yīng)進(jìn)行坐標(biāo)變換,得到正、負(fù)序分量在這個(gè)假定d′q′坐標(biāo)系中的投影,變換方法為
(8)
由于正序分量與假定旋轉(zhuǎn)角θ′是同向同速旋轉(zhuǎn)的,因而正序分量投影到假定d′q′坐標(biāo)系中的d′、q′坐標(biāo)軸分量均是直流分量。而負(fù)序分量與假定旋轉(zhuǎn)角θ′是反向同速旋轉(zhuǎn)的,因而負(fù)序分量投影到假定d′q′坐標(biāo)系中的d′、q′坐標(biāo)軸分量均是交流分量。利用低通濾波器可以濾除掉變換后的負(fù)序d′、q′軸分量(交流量),再經(jīng)過反坐標(biāo)變換就可以得到正序分量;反之,利用高通濾波器可以濾除掉變換后的正序d′、q′軸分量(直流量),再經(jīng)過反坐標(biāo)變換就可以得到負(fù)序分量。
利用最小二乘算法估計(jì)正序分量采樣點(diǎn)中某一點(diǎn)處的相角(負(fù)序分量相角估計(jì)方法與正序分量類似),首先假設(shè)正序分量在該點(diǎn)處相角為φ,正序分量在該采樣點(diǎn)處的幅值為AMP,信號(hào)采樣角速度為ωs(已知),正序分量的采樣值y[n](n=0,1,2,…)可以表示為
(9)
式中,對(duì)每一個(gè)確定的n值,cos[2π(ωh/ωs)n]和sin[2π(ωh/ωs)n]均是常數(shù),分別設(shè)為Q1[n]、Q2[n]。再做變量替換,設(shè)α1=AMP cosφ,α2=AMP sinφ,可以得到
y[n]=Q1[n]·α1-Q2[n]·α2
(10)
對(duì)式(10)采用最小二乘算法估計(jì)出α1、α2,然后利用α1、α2與正序分量在該點(diǎn)處相角的關(guān)系求得φ值。以3點(diǎn)的最小二乘算法為例,這種位置估計(jì)算法需要約10次乘法和5次加法的運(yùn)算量,計(jì)算量不大。
2 N、S極性辨別
確定電機(jī)轉(zhuǎn)子d軸初始位置后需要對(duì)轉(zhuǎn)子N、S極性進(jìn)行辨別。一般情況下,考慮到電機(jī)的材料利用率,在設(shè)計(jì)電機(jī)時(shí)往往會(huì)讓電機(jī)磁路處于微飽和的狀態(tài),對(duì)電機(jī)N極正方向施加電壓,會(huì)增加磁路的飽和程度,從而降低Ld;對(duì)電機(jī)S極正方向施加電壓,會(huì)減弱磁路的飽和程度,從而增加Ld。通過計(jì)算可知電機(jī)d軸電流表達(dá)式為
(11)
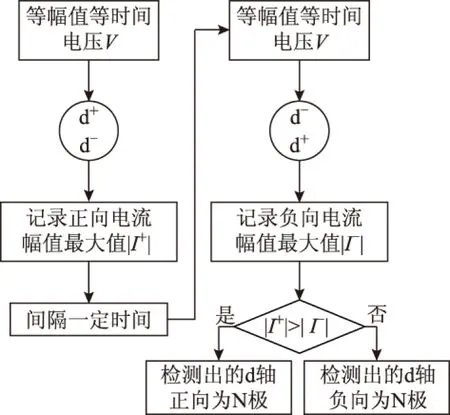
圖2 轉(zhuǎn)子N、S極性辨別方法Fig.2 Rotor N,S polarity discrimination method
3 實(shí)驗(yàn)與結(jié)果分析
為了驗(yàn)證本文所提出的IPMSM轉(zhuǎn)子初始位置檢測(cè)方法的正確性,在一臺(tái)IPMSM上進(jìn)行了實(shí)驗(yàn)驗(yàn)證。實(shí)驗(yàn)用電機(jī)參數(shù)見表1。實(shí)驗(yàn)中向IPMSM注入的高頻電壓信號(hào)頻率為0.5 kHz,幅值為50 V。
表1 實(shí)驗(yàn)用IPMSM主要參數(shù)
Tab.1 Main parameters of experimental IPMSM
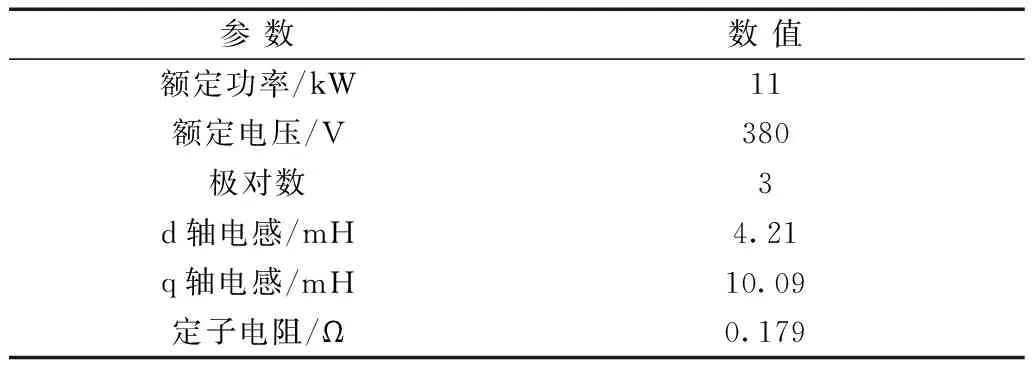
參數(shù)數(shù)值額定功率/kW11額定電壓/V380極對(duì)數(shù)3d軸電感/mH4.21q軸電感/mH10.09定子電阻/Ω0.179
圖3為當(dāng)轉(zhuǎn)子位置角θ=0°時(shí)通過對(duì)三相電流響應(yīng)進(jìn)行濾波處理后得到的三相高頻電流波形。
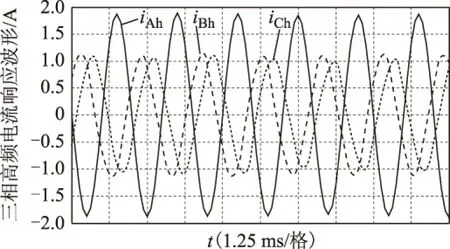
圖3 θ=0°時(shí)三相高頻電流波形Fig.3 Three-phase high-frequency current when θ=0°
圖4為當(dāng)轉(zhuǎn)子位置角θ=0°時(shí),通過同步旋轉(zhuǎn)坐標(biāo)變換得到的三相高頻電流的正、負(fù)序分量波形,其中上標(biāo)“+”、“-”分別表示正序、負(fù)序分量。
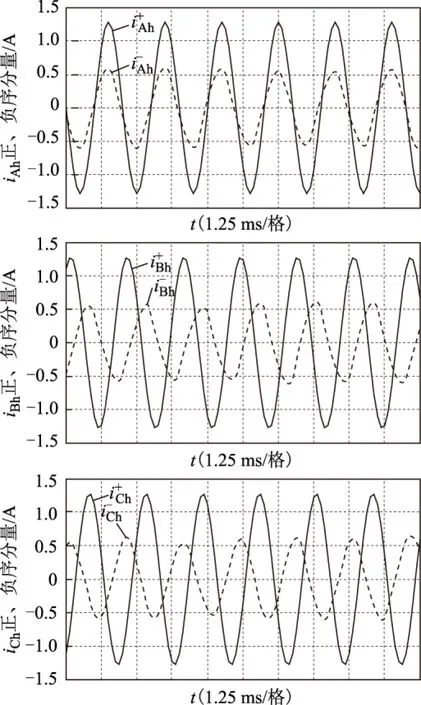
圖4 θ=0°時(shí)三相高頻電流正、負(fù)序分量波形Fig.4 Positive and negative sequence component waveform of three-phase high-frequency current when θ=0°
圖5為當(dāng)轉(zhuǎn)子位置角θ=0°時(shí)通過最小二乘擬合得到的三相高頻電流正、負(fù)序分量的相角波形。
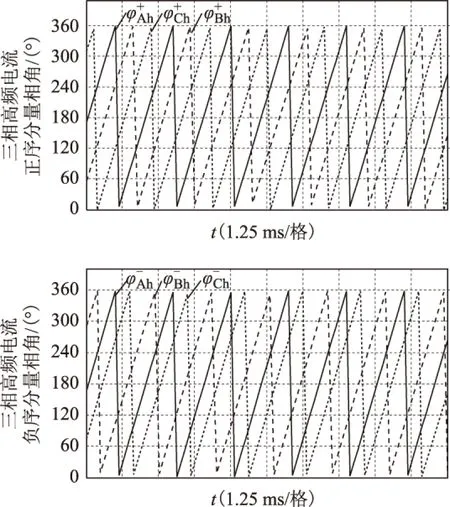
圖5 θ=0°時(shí)三相高頻電流正、負(fù)序分量相角波形Fig.5 Positive and negative sequence component phase waveform of three-phase high-frequency current when θ=0°
經(jīng)過運(yùn)算可得檢測(cè)轉(zhuǎn)子位置角θ″=0.19°,經(jīng)判斷,此θ″指向N極位置,因此檢測(cè)位置角θ′=θ″=0.19°,檢測(cè)誤差Δθ=θ′-θ=0.19°。
圖6為當(dāng)轉(zhuǎn)子位置角θ=210°時(shí)的三相高頻電流波形。
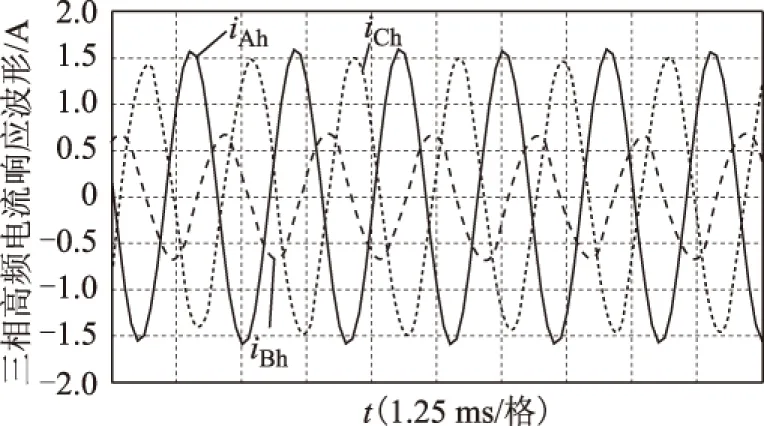
圖6 θ=210°時(shí)三相高頻電流波形Fig.6 Three-phase high-frequency current when θ=210°
圖7為當(dāng)轉(zhuǎn)子位置角θ=210°時(shí)的三相高頻電流的正、負(fù)序分量波形。圖8為當(dāng)轉(zhuǎn)子位置角θ=210°時(shí)的三相高頻電流正、負(fù)序分量的相角波形。
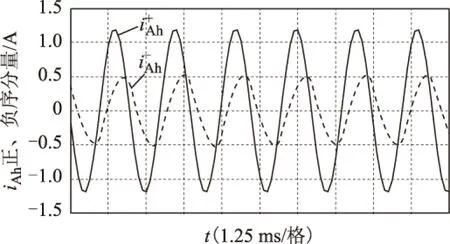

圖7 θ=210°時(shí)三相高頻電流正、負(fù)序分量波形Fig.7 Positive and negative sequence component waveform of three-phase high-frequency current when θ=210°
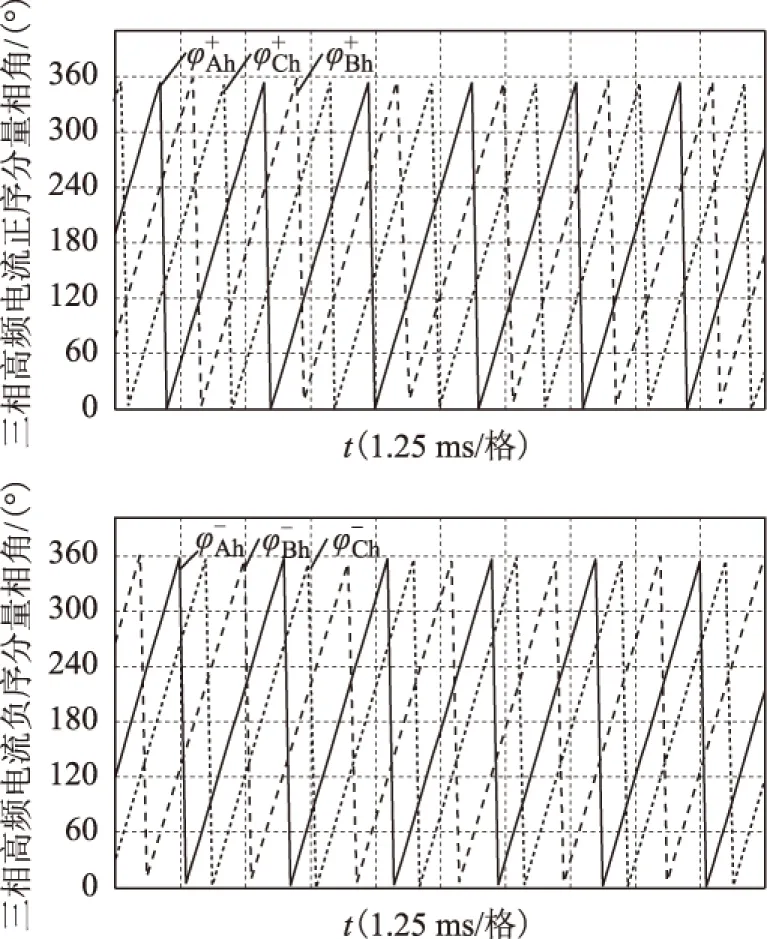
圖8 θ=210°時(shí)三相高頻電流正、負(fù)序分量相角波形Fig.8 Positive and negative sequence component phase waveform of three-phase high-frequency current when θ=210°
經(jīng)過運(yùn)算可得檢測(cè)轉(zhuǎn)子位置角θ″=28.534°,經(jīng)N、S極性判斷可知,此θ″指向S極位置,轉(zhuǎn)子N極位置與檢測(cè)到的位置角θ″相差180°,因此,最終檢測(cè)位置角θ′=θ″+180°=208.534°,檢測(cè)誤差Δθ=θ′-θ=-1.466°。
(12)

圖9 轉(zhuǎn)子位置檢測(cè)誤差Fig.9 Detection error of rotor position
上述IPMSM轉(zhuǎn)子初始位置檢測(cè)方法的檢測(cè)誤差主要來源于電流采樣誤差、電機(jī)結(jié)構(gòu)不對(duì)稱所帶來的電流響應(yīng)誤差、數(shù)學(xué)模型近似所帶來的誤差等。對(duì)于電流響應(yīng)或檢測(cè)帶來的誤差,可以采用增加注入高頻信號(hào)周期數(shù)的方法來盡量減小這一誤差。
4 結(jié)論
1)本文對(duì)內(nèi)置式永磁同步電機(jī)轉(zhuǎn)子初始位置檢測(cè)方法進(jìn)行了研究,提出一種基于高頻信號(hào)注入法的檢測(cè)技術(shù)。通過向IPMSM中注入一個(gè)旋轉(zhuǎn)高頻電壓信號(hào),檢測(cè)電機(jī)繞組的電流響應(yīng),并通過BPF濾除雜波得到三相高頻電流響應(yīng);然后利用同步旋轉(zhuǎn)坐標(biāo)變換對(duì)三相高頻電流的正、負(fù)序分量進(jìn)行分離,并通過最小二乘擬合算法估計(jì)出三相高頻電流的正、負(fù)序分量的相角,再通過一定的數(shù)學(xué)運(yùn)算得到轉(zhuǎn)子d軸初始位置;最后利用磁路飽和效應(yīng)對(duì)轉(zhuǎn)子N、S極性進(jìn)行辨別。
2)本文方法不受注入高頻電壓信號(hào)幅值U和角頻率ωh的影響,對(duì)電機(jī)參數(shù)變化不敏感,魯棒性強(qiáng),轉(zhuǎn)子初始位置檢測(cè)誤差絕對(duì)值|Δθ|< 4°,平均檢測(cè)誤差約為1.73°。與現(xiàn)在多數(shù)無位置檢測(cè)技術(shù)對(duì)初始位置檢測(cè)問題所能達(dá)到的5°的誤差,本文方法有一定程度上的提高。整個(gè)檢測(cè)過程用時(shí)為ms級(jí),計(jì)算量也與一般的高頻信號(hào)注入法相當(dāng),由于初始位置檢測(cè)問題對(duì)檢測(cè)方法沒有很強(qiáng)的實(shí)時(shí)性要求,因而ms級(jí)的檢測(cè)時(shí)間對(duì)控制系統(tǒng)和人而言是可以接受的。該方法完全能夠滿足內(nèi)置式永磁同步電機(jī)平穩(wěn)起動(dòng)的要求,工程實(shí)用價(jià)值較高。
[1] 賈洪平,賀益康.基于高頻注入法的永磁同步電動(dòng)機(jī)轉(zhuǎn)子初始位置檢測(cè)研究[J].中國電機(jī)工程學(xué)報(bào),2007,27(15):15-20. Jia Hongping,He Yikang.Study on inspection of the initial rotor position of a PMSM based on high-frequency signal injection[J].Proceedings of the CSEE,2007,27(15):15-20.
[2] Diaz R D,Briz F,Blanco C C,et al.Sensorless control of doubly fed induction generators based on rotor high-frequency signal injection[J].IEEE Transactions on Industry Applications,2013,49(6):2593-2601.
[3] 劉家曦,李立毅,杜鵬程.考慮磁場(chǎng)交叉耦合的內(nèi)嵌式永磁同步電機(jī)初始位置檢測(cè)技術(shù)[J].電工技術(shù)學(xué)報(bào),2013,28(7):32-38. Liu Jiaxi,Li Liyi,Du Pengcheng.Initial rotor position estimation considering magnetic cross-coupling based on IPMSM[J].Transactions of China Electrotechnical Society,2013,28(7):32-38.
[4] 湯寧平,崔彬.高分辨的永磁無刷直流電機(jī)轉(zhuǎn)子零初始位置檢測(cè)方法[J].電工技術(shù)學(xué)報(bào),2013,28(10):90-96. Tang Ningping,Cui Bin.A high resolution detecting method for rotor zero initial position of sensorless brushless DC motor[J].Transactions of China Electrotechnical Society,2013,28(10):90-96.
[5] 陳思溢,皮佑國.基于滑模觀測(cè)器與滑模控制器的永磁同步電機(jī)無位置傳感器控制[J].電工技術(shù)學(xué)報(bào),2016,31(12):108-117. Chen Siyi,Pi Youguo.Position sensorless control for permanent magnet synchronous motor based on sliding mode observer and sliding mode controller[J].Transactions of China Electrotechnical Society,2016,31(12):108-117.
[6] 王冉珺,劉恩海.永磁同步電機(jī)轉(zhuǎn)子初始位置的檢測(cè)方法[J].電機(jī)與控制學(xué)報(bào),2012,16(1):62-66. Wang Ranjun,Liu Enhai.Method for initial rotor position inspection on of PMSM[J].Electric Machines and Control,2012,16(1):62-66.
[7] Alberti L,Bianchi N,Morandin M,et al.Finite-element analysis of electrical machines for sensorless drives with high-frequency signal injection[J].IEEE Transactions on Industry Applications,2014,50(3):1871-1879.
[8] 黃科元,周李澤,周滔滔,等.一種增強(qiáng)可靠性的永磁同步電機(jī)初始角檢測(cè)[J].電工技術(shù)學(xué)報(bào),2015,30(1):45-51. Huang Keyuan,Zhou Lize,Zhou Taotao,et al.An enhanced reliability method for initial angle detection on surface mounted permanent magnet synchronous motors[J].Transactions of China Electrotechnical Society,2015,30(1):45-51.
[9] 李旭春,張鵬,嚴(yán)樂陽,等.具有參數(shù)辨識(shí)的永磁同步電機(jī)無位置傳感器控制[J].電工技術(shù)學(xué)報(bào),2016,31(14):139-147,164. Li Xuchun,Zhang Peng,Yan Leyang,et al.Sensorless control of permanent magnet synchronous motor with online parameter identification[J].Transactions of China Electrotechnical Society,2016,31(14):139-147,164.
[10]Lin T C,Zhu Z Q.Sensorless operation capability of surface-mounted permanent-magnet machine based on high-frequency signal injection methods[J].IEEE Transactions on Industry Applications,2015,51(3):2161-2171.
[11]魯家棟,劉景林,衛(wèi)麗超.永磁同步電機(jī)初始位置檢測(cè)方法[J].電工技術(shù)學(xué)報(bào),2015,30(7):105-111. Lu Jiadong,Liu Jinglin,Wei Lichao.Estimation of the initial rotor position for permagent magnet synchronous motors[J].Transactions of China Electrotechnical Society,2015,30(7):105-111.
[12]劉海東,周波,郭鴻浩,等.脈振高頻信號(hào)注入法誤差分析[J].電工技術(shù)學(xué)報(bào),2015,30(6):38-44. Liu Haidong,Zhou Bo,Guo Honghao,et al.Error analysis of high frequency pulsating signal injection method[J].Transactions of China Electrotechnical Society,2015,30(6):38-44.
[13]田兵,安群濤,孫東陽,等.基于磁飽和效應(yīng)的表貼式永磁同步電機(jī)初始位置檢測(cè)方法[J].電工技術(shù)學(xué)報(bào),2016,31(1):155-164. Tian Bing,An Quntao,Sun Dongyang,et al.Initial position estimation for surface permanent magnet synchronous motors based on magnetic saturation effect[J].Transactions of China Electrotechnical Society,2016,31(1):155-164.
[14]Reigosa D,Briz F,Blanco C,et al.Sensorless control of doubly fed induction generators based on stator high-frequency signal injection[J].IEEE Transactions on Industry Applications,2014,50(5):3382-3391.
[15]Yu Chen-Yen,Tamura J,Reigosa D,et al.Position self-sensing evaluation of a FI-IPMSM based on high-frequency signal injection methods[J].IEEE Transactions on Industry Applications,2013,49(2):880-888.
High-Precision Estimation Method of Initial Rotor Position for IPMSM Based on Phase Difference of Positive and Negative Sequence Current Component
Liu Jinglin Lu Jiadong
(School of Automation Northwestern Polytechnical University Xi’an 710129 China)
On the basis of the research on static initial position detection technology of interior permanent magnet synchronous motor (IPMSM),a new high-precision method based on high-frequency signal injection is suggested.In the proposed method,a high-frequency rotating voltage was superimposed in the control voltage first,then the high-frequency current component was obtained by band-pass filtering of the three-phase current signal,and the positive and negative sequence components of high-frequency current response were separated by using synchronous rotating coordinate transformation,the phase of positive and negative sequence components of the three-phase high-frequency current response was extracted by the least square algorithm,the rotor position was obtained by using the difference of arbitrary phase current of positive and negative sequence components phase.Finally the NS poles was distinguished by using motor magnetic saturation effect.The method has high-precision detection accuracy,and the average detection error is about 1.73 degrees (electric angle).The experimental results show the correctness of the proposed method.
Interior permanent magnet synchronous motor,initial rotor position,high-frequency signal injection,least square algorithm
陜西省科技統(tǒng)籌創(chuàng)新工程計(jì)劃項(xiàng)目資助(2013KTCQ01-20,2016KTCQ01-49)。
2015-08-29 改稿日期 2015-10-22
TM315
劉景林 男,1964年生,教授,博士生導(dǎo)師,研究方向?yàn)楹娇蘸教煳⑻仉姍C(jī)及驅(qū)動(dòng)系統(tǒng)、電機(jī)智能控制及測(cè)試技術(shù)等。
E-mail:JinglinL@nwpu.edu.cn
魯家棟 男,1990年生,博士研究生,研究方向?yàn)橛来磐诫姍C(jī)無位置傳感器控制技術(shù)等。
E-mail:310770952@qq.com(通信作者)
猜你喜歡
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
兒童故事畫報(bào)(2019年5期)2019-05-26 14:26:14
海峽科技與產(chǎn)業(yè)(2016年3期)2016-05-17 04:32:12
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12

- 電工技術(shù)學(xué)報(bào)的其它文章
- 軸向磁通永磁同步電機(jī)轉(zhuǎn)矩解析模型和轉(zhuǎn)矩優(yōu)化
- 基于仿射算術(shù)優(yōu)化的不確定系統(tǒng)區(qū)間潮流快速分解法
- 計(jì)及時(shí)間約束的改進(jìn)模糊Petri網(wǎng)故障診斷模型
- 基于切片采樣的風(fēng)力發(fā)電并網(wǎng)系統(tǒng)概率潮流計(jì)算
- 考慮故障電阻隨機(jī)不確定性的電壓暫降監(jiān)測(cè)點(diǎn)優(yōu)化配置
- 基于實(shí)時(shí)負(fù)載轉(zhuǎn)矩反饋補(bǔ)償?shù)挠来磐诫姍C(jī)變?cè)鲆鍼I控制